 如何用手臂控制一个DOF机器人手臂
如何用手臂控制一个DOF机器人手臂
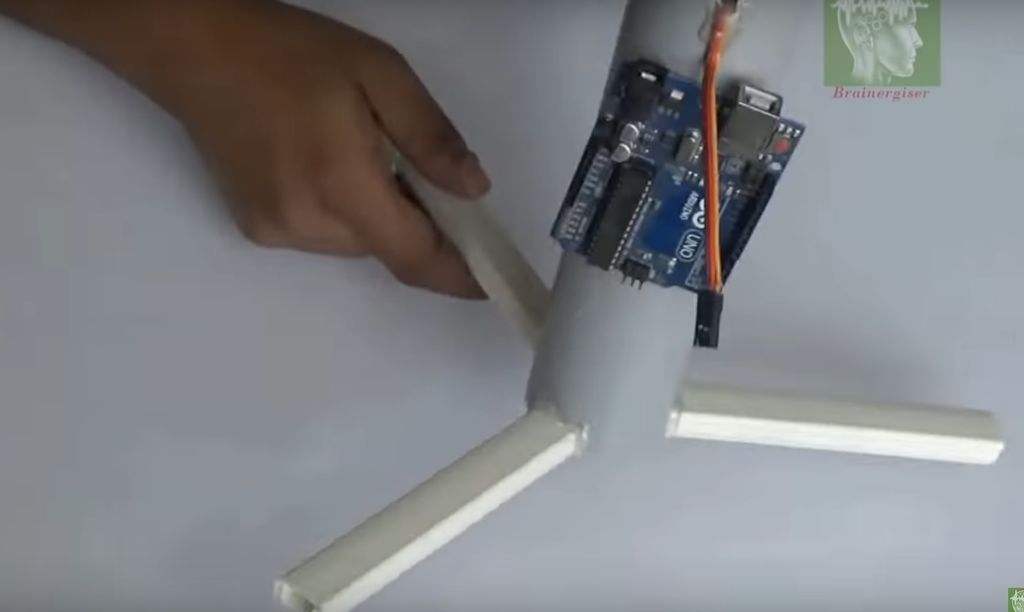
步骤1:方框图/Scematic
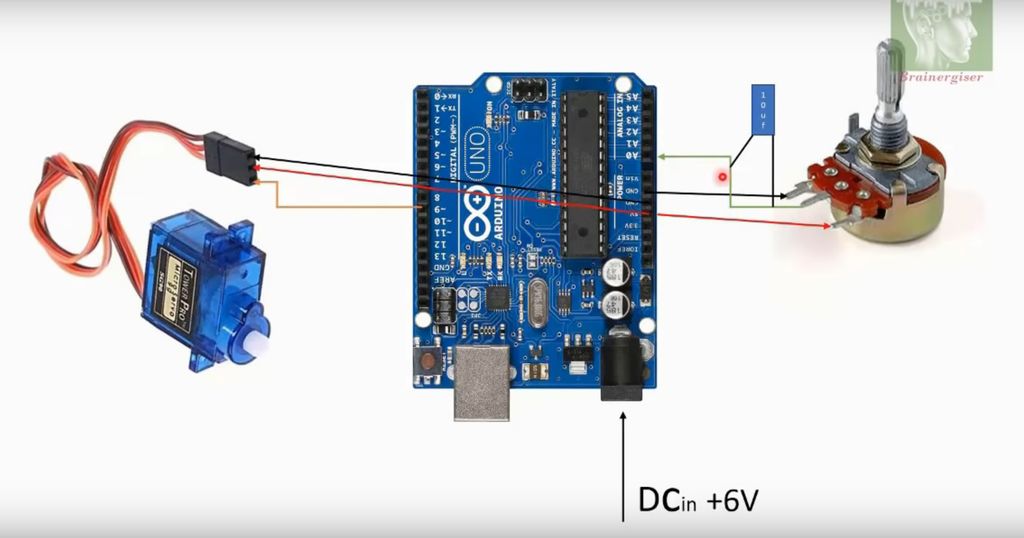
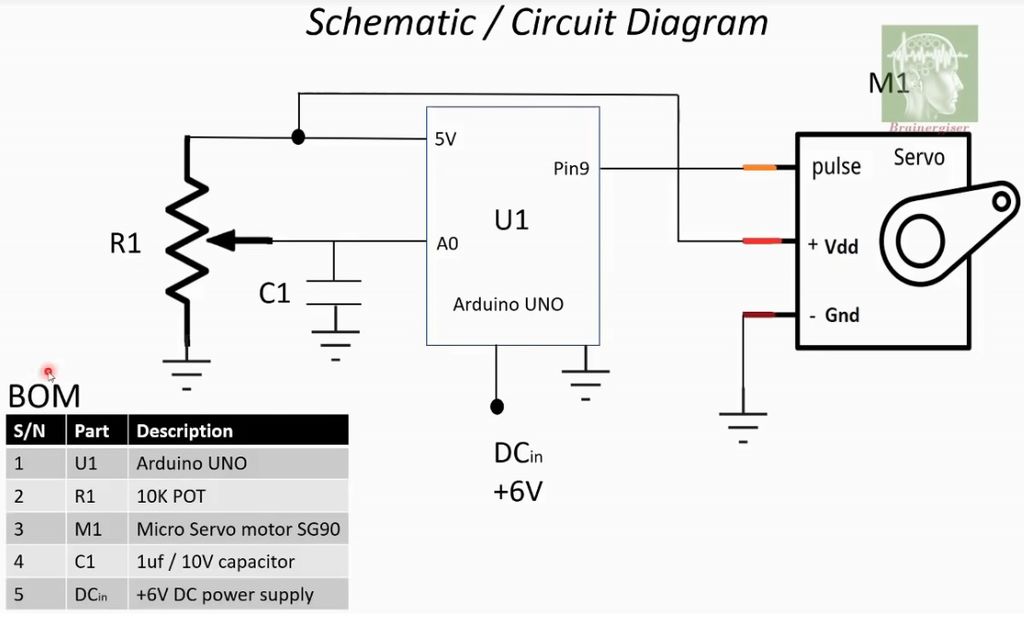
制作所需的电子元件:
1》 Arduino UNO板
2》 Micro SErvo电机
3》 10 K POT
4》 1uf,16V电容。
连接到端口-9和POT的伺服引脚连接到Arduino板的端口-A0。
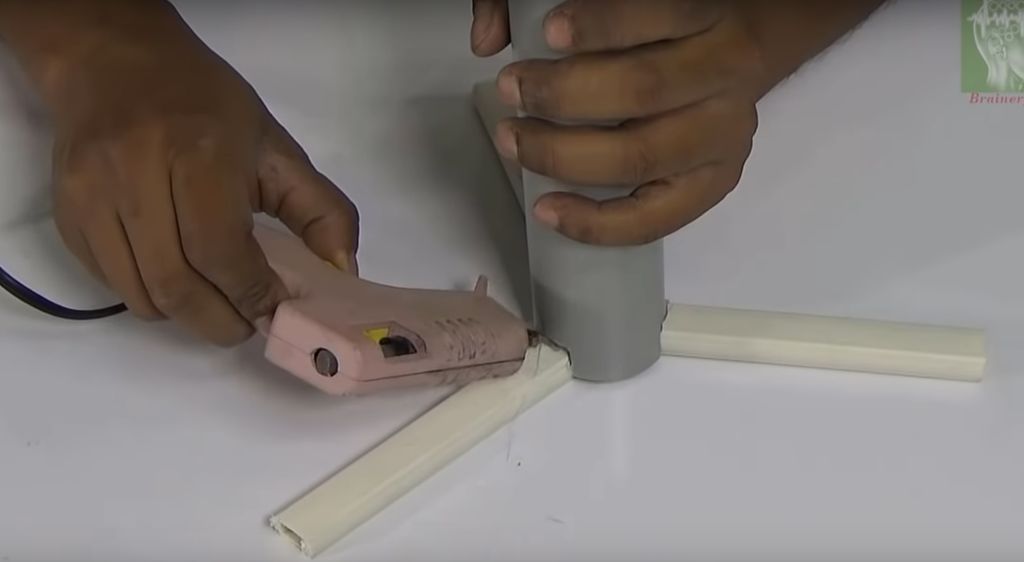
第2步:构建传感器
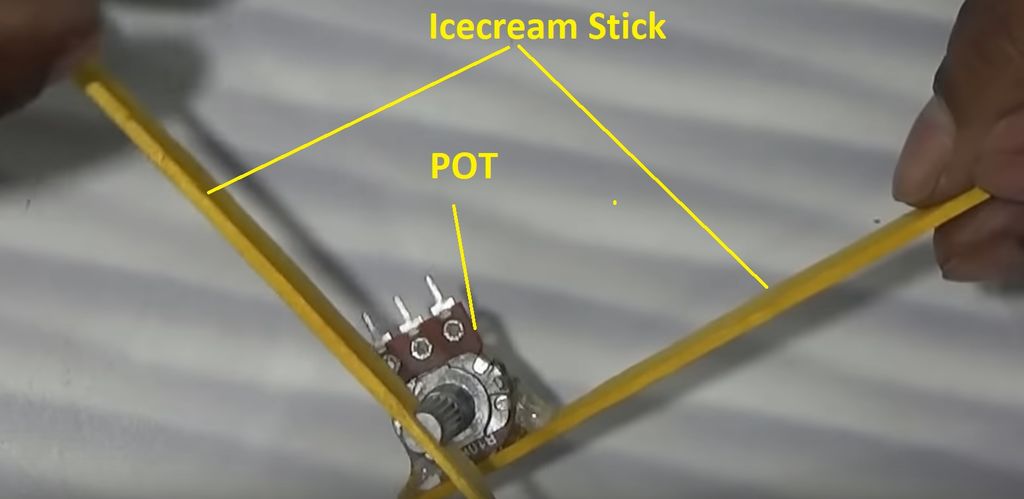
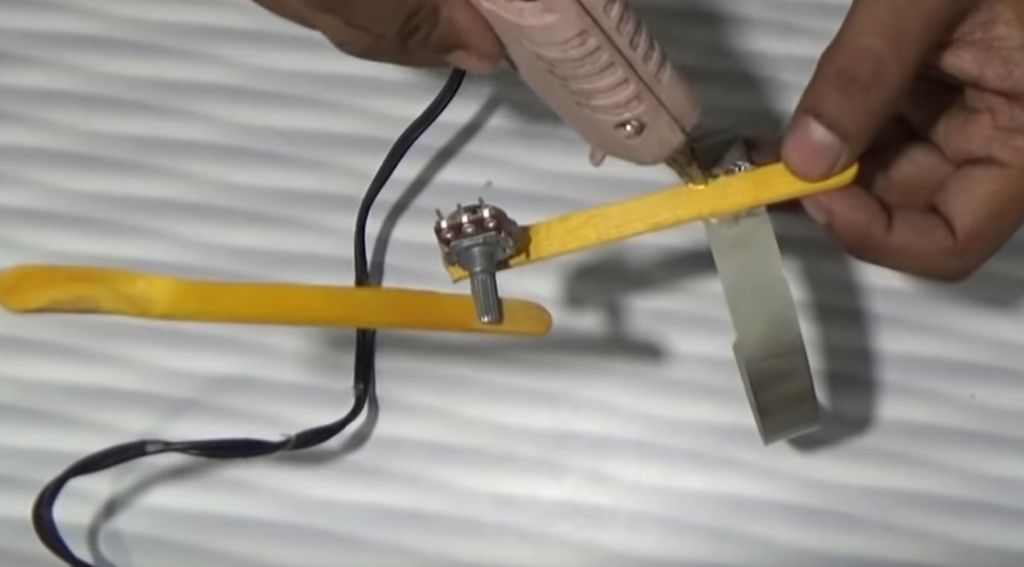

我们使用过两个冰淇淋棒和一个半PVC管,使传感器成为我们手臂的一部分。使用热胶将一根棒连接在罐和PVC管之间。其他棒只附有POT。
将半PVC管与夹子一样连在一起。 POT位于肘部,传感器杆的另一侧需要自由运动,因此使用橡皮筋与前臂连接。
第3步:构建手臂

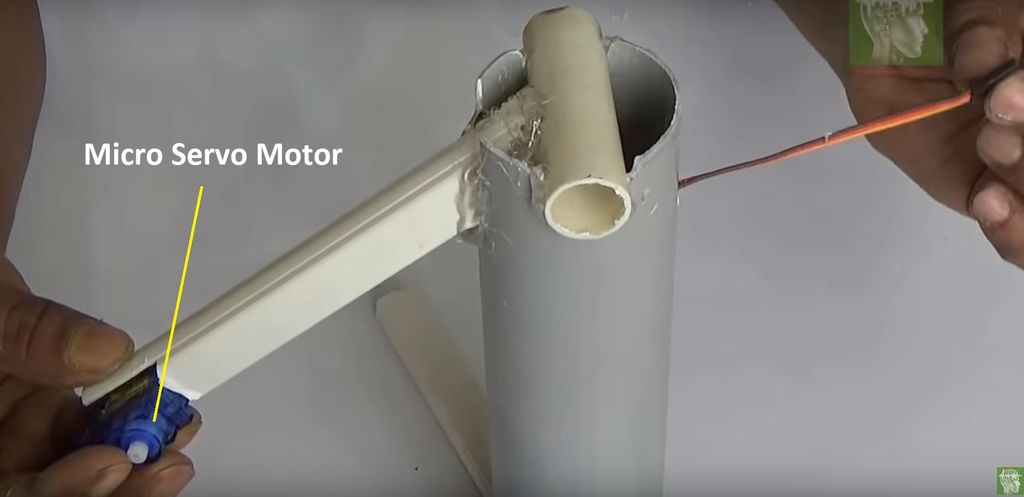

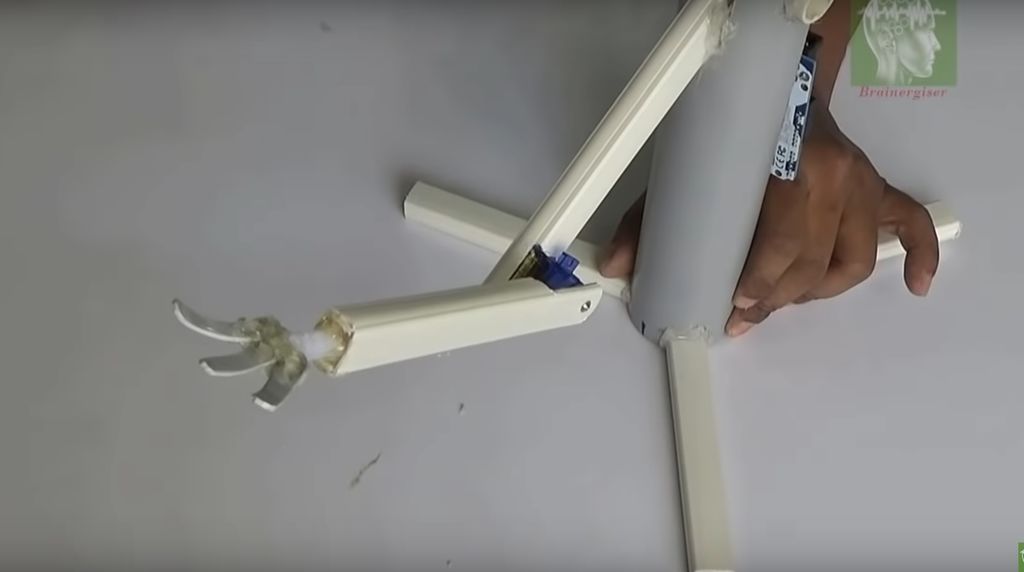

我们使用PVC管和电线套管制作一个自由度(DOF)机器人手臂。用于弯头联合我们使用一个伺服电机。伺服连接到Pin-9的Arduino板。
第4步:Arduino代码
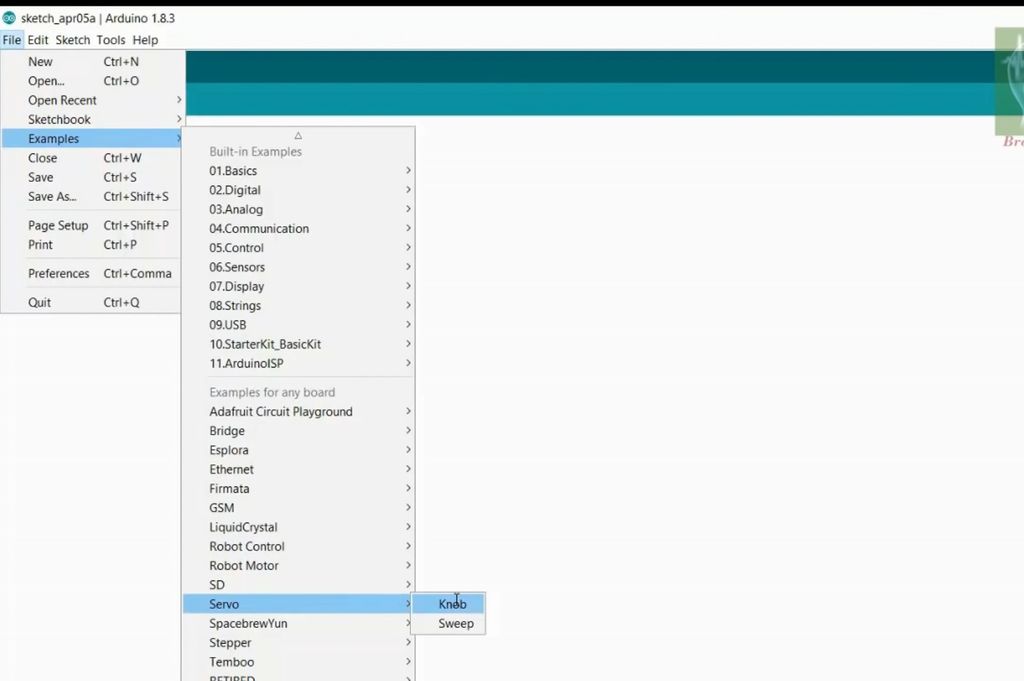
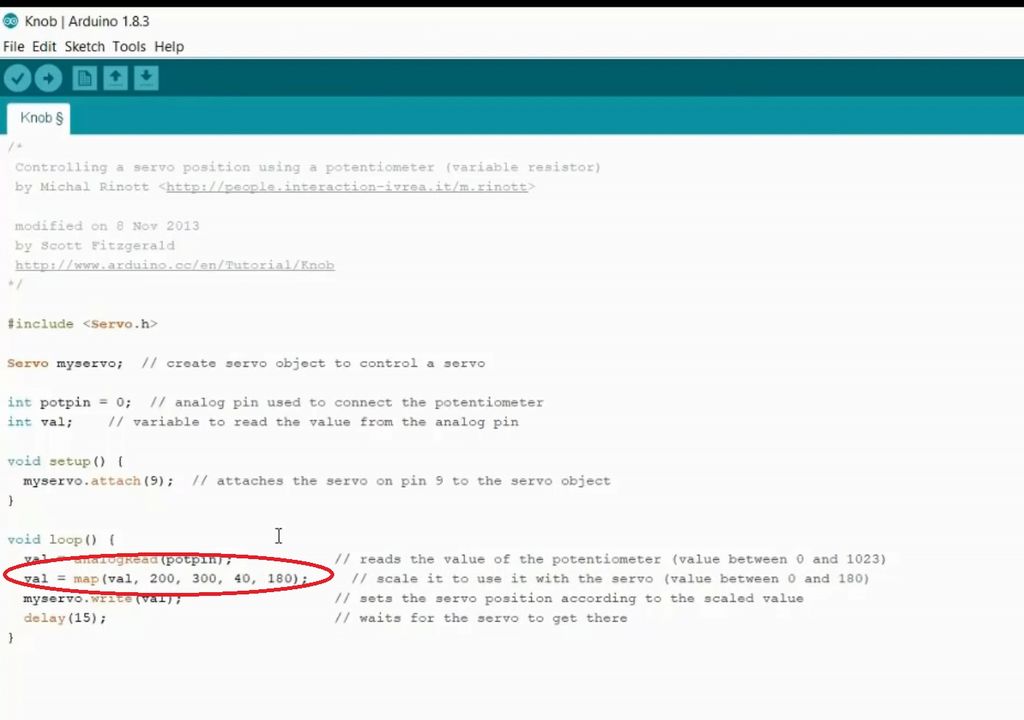
这很容易。它读取连接POT的Port-A0的模拟值,并根据该值从地图数组中生成一个值。它发送到pwm端口-9。基本上它是Arduino IDE中的示例文件。转到file-》 example- Servo-》 knob.You只调整map()函数的值。
步骤5:最终装配和测试

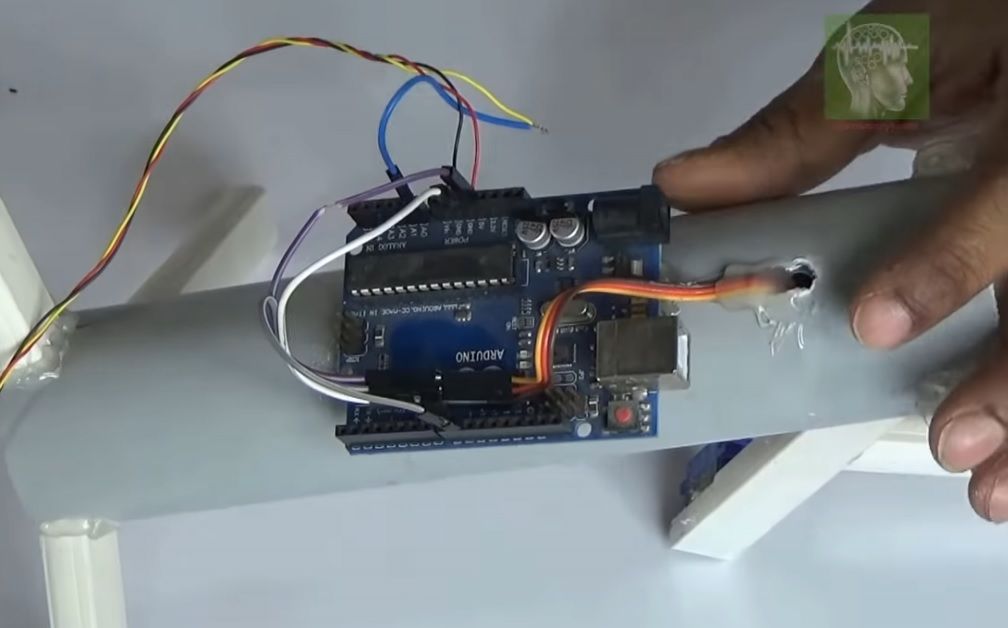
连接伺服和锅线Arduino按照原理图。加载草图。使用外部6V电源为Arduino UNO供电。精细调整地图功能。现在喜欢玩这个机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Arduino
+关注
关注
188文章
6469浏览量
187054 -
机器人手臂
+关注
关注
1文章
7浏览量
2578
发布评论请先 登录
相关推荐
车间工业机器人数据采集的有效解决方案
连接边缘设备与云端的关键节点,为这一难题提供了革命性的解决方案。 在繁忙的生产车间,工业机器人手臂灵活地穿梭在生产线之间,将一个个零部件精准地组装到位。这些机器人不仅承载着生产的重任,
变速齿轮在机器人中的使用
扭矩的传动装置。它通常由多个不同大小的齿轮组成,通过齿轮间的啮合来传递动力,并实现转速和扭矩的转换。 二、变速齿轮在机器人中的使用 驱动机器人手臂 : 机器人的手臂需要灵活、精确地移动
焊接机器人六个轴分别是什么作用
焊接机器人是现代工业自动化中的重要工具,其灵活性和高效性极大地提升了焊接质量和生产效率。在焊接机器人中,“六轴”是一个常见的结构设计,这六个

舵机技术深度解析,让机器人更智能!
你是否曾驻足于那些灵活的机器人手臂前,惊叹于它们如何精准地抓取物品?或者你是否曾仰望蓝天,对无人机那行云流水般的飞行轨迹感到好奇?这些令人瞩目的技术成就,其背后的秘密武器,正是我们今天要深入探讨
如果设计一款桌面款的机器玩具,最吸引人的外观与功能要有哪些?
初步设想制作如下其中一款,有感兴趣的朋友可以帮提提意见。
A一款圆敦敦的音响状的“个人日程助手”,具备番茄闹钟、音乐播放、减压交互、语言对话、工作日报生成。
B一款迷你瓦利机器人,有
发表于 10-19 18:25
EtherNet/IP转DeviceNet协议网关(EtherNet/IP转DeviceNet)
连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 广泛应用:自动化装配生产线中的机器人手臂采用EtherNet/IP协议,而部分输送线和检测设备使用DeviceNet

EtherNet/IP转DeviceNet协议网关(JM-EIP-DNT)
连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 广泛应用:自动化装配生产线中的机器人手臂采用EtherNet/IP协议,而部分输送线和检测设备使用DeviceNet
ABB扩大模块化工业机器人产品线,打造高灵活定制化生产
随着自动化浪潮不断推进,工厂生产线对机器人的需求与日俱增。近年来,全球机器人巨头ABB紧跟市场脉搏,推出一系列创新产品。近日,ABB机器人扩大其模块化工业
AMD Kria™ KR 260套件+ROS 2快速开发机器人解决方案
在这个项目中,我们将配置AMD Kria™ KR 260机器人入门套件来控制Trossen Robotics ReactorX 150机器人手臂。这个复杂的机器人手臂使用ROBOTIS

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
概述
中国制造 2025 是中国政府实施制造强国战略的第一个十年行动纲领,是全面提升中国制造业发展质量和水平的重大战略部署,其中明确指出了围绕工业机器人创新技术的重要地位。目前工业机器人
发表于 05-29 16:17
日本食品机器人可以与食物交流,以此改变你的味觉
这款机器人外型为苹果口味软糖,拥有两只圆溜溜的大眼和一双挥动自如的手臂,能够发声说:“您好,我非常期待与您对话。”此外,它还有节奏地摇动躯干。
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(上)
广泛。随着AI技术的进步,机械手臂不仅能执行复杂的操作任务,还能通过自然语言处理技术进行更加直观的交互,极大提高了灵活性和用户友好性。 就比如说微软的一个人工智能研究中心,研究如何用自然语言来
求一种电动夹爪的运动控制方案
夹爪的应用是机器人、机械手臂末端执行器,其稳定、高效、精准、科技化的特点,有效提高了各行各业生产效率,解决工业化精密运动控制的难题。






 工商网监
工商网监
评论