 桌面千兆像素显微镜的制作
桌面千兆像素显微镜的制作
第1步:供应清单


材料:
1。尼康dSLR(我使用的是我的尼康D5000)
2。 28mm焦距镜头,52mm螺纹
3。 80mm焦距镜头,58mm螺纹
4。 52mm至58mm反向耦合器
5。三脚架
6。七张3毫米厚的胶合板
7。 Arduino Nano
8。两架H桥L9110 https://www.amazon.com/gp/product/B00NN6EB3U/ref=o.。.
9。两个红外发射器
10。两个红外接收器
11。按钮
12。两个2.2kOhm电阻器
13。两个150欧姆的电阻器
14。一个1kOhm电阻器
15。尼康相机的远程发布https://www.amazon.com/gp/product/B00MCA191K/ref=o.。.
16。黑色海报板
17。硬件套件:https://www.amazon.com/gp/product/B06XQMBDMX/ref=o 。..
18。两个步进电机(我使用Nema 17双极步进电机3.5V 1A)
19。两个2mm导螺杆
20。四个枕块
21。两个丝杠螺母
22。两个轴承滑动衬套和200毫米线性轴:https://www.amazon.com/gp/product/B01KL7I65W/ref=p.。.
23。 5V电源:https://www.amazon.com/gp/product/B01M0KLECZ/ref=o.。.
24。绕丝线
工具
1。 激光切割机
2。 3D打印机
3。艾伦扳手
4。剪线钳
5。绕线工具
步骤2:系统概述

要转换样品,两个步进电机在正交方向上对齐在x和y方向上移动一个舞台。电机由两个H桥和一个Arduino控制。位于步进电机底部的IR传感器用于将各级归零,因此它们不会进入块的任一端。数字显微镜位于XY平台上方。
定位样品并将载物台居中后,按下按钮开始采集。电机将舞台移动到左下角,触发相机。然后电机以小步骤平移样品,因为相机在每个位置拍照。
拍摄完所有图像后,将图像拼接在一起形成千兆像素图像。
第3步:显微镜装配



我做了一个低倍显微镜,配有dSLR(尼康5000),尼康28mm f/2.8镜头和尼康28-80mm变焦镜头。变焦镜头的焦距设定为80mm。这两个镜头的组合就像一个显微管镜头和物镜。总放大倍率是焦距的比率,约为3倍。这些镜头实际上并不是为这种配置而设计的,因此为了让光像显微镜一样传播,你必须在两个镜头之间放置一个光圈。
首先,将较长焦距的镜头安装到相机上。从黑色海报板上切下一个圆圈,其直径大致与镜头前表面的大小相同。然后在中间切一个小圆圈(我选择直径约3毫米)。圆的大小将决定进入系统的光量,也称为数值孔径(NA)。对于精心设计的显微镜,NA确定系统的横向分辨率。那么为什么不在此设置中使用高NA?那么,有两个主要原因。首先,随着NA增加,系统的光学像差变得更加突出并且将限制系统的分辨率。在这样的非传统设置中,情况很可能如此,因此增加NA最终将不再有助于提高分辨率。其次,景深也取决于NA。 NA越高,景深越浅。这使得难以将不平坦的物体全部聚焦。如果NA变得太高,那么您将仅限于成像显微镜载玻片,其具有薄样品。
两个镜头之间的孔径光阑的定位使得系统大致远心。这意味着系统的放大率与物距无关。这对于将图像拼接在一起变得很重要。如果对象具有不同的深度,则来自两个不同位置的视图将具有偏移的视角(如人类视觉)。将图像拼接在一起并非远心成像系统具有挑战性,尤其是在高倍率的情况下。
使用58mm至52mm镜头反向耦合器将28mm镜头连接到80mm镜头,光圈位于中间。
第4步:XY舞台设计






我使用Fusion 360设计了舞台。对于每个扫描方向,有四个部分需要3D打印:贴片机安装,两个滑动单元扩展器和一个导螺杆安装。 XY平台的底座和平台由3mm厚的胶合板激光切割而成。底座固定X方向电机和滑块,X平台固定Y方向电机和滑块,Y平台固定样品。底座由3张纸组成,两个平台由2张纸组成。在该步骤中提供用于激光切割和3D打印的文件。切割和打印这些部件后,您就可以进行后续步骤了。
步骤5:电机安装组件








使用绕线工具,将导线缠绕在两个红外发射器和两个红外接收器的引线上。对电线进行颜色编码,以便了解哪一端是哪一端。然后切断二极管上的引线,这样只需从绕线开始。将电线滑过电机座中的导轨,然后将二极管推入到位。导线被引导,直到它们离开单元的后部才能看到它们。这些电线可以与电机线连接。现在使用四个M3螺栓安装步进电机。对第二个电机重复此步骤。
步骤6:舞台装配













将底座1和底座2切口粘合在一起,其中一个切口带有六角形开口,用于M3螺母。胶水干燥后,将M3螺母锤入到位。压入板时螺母不会旋转,因此您可以在以后拧入螺栓。现在粘上第三张底片(底座3)以盖住螺母。
现在是时候组装铅螺母支架了。从支架上清除任何额外的灯丝,然后将四个M3螺母推入到位。它们是紧密配合,因此请确保使用小螺丝刀清除螺栓和螺母空间。将螺母对齐后,将导螺母推入底座并用4个M3螺栓固定。
将X方向线性平移器的轴承座,滑块安装座和电机座安装到底座上。将导螺母组件放在导螺杆上,然后将导螺杆滑入到位。使用耦合器将电机连接到导螺杆。将滑块单元放入杆中,然后将杆推入滑块安装座。最后,使用M3螺栓连接滑块安装延长器。
X1和X2胶合板以与基座类似的方式胶合在一起。 Y方向线性转换器和样品台重复相同的步骤。
步骤7:扫描仪电子设备



每个步进电机有四根电缆连接到H桥模块。根据上图,IR发射器和接收器的四根电缆连接到电阻器。接收器的输出连接到模拟输入A0和A1。两个H桥模块连接到Arduino Nano上的引脚4-11。按钮通过1kOhm电阻连接到引脚2,便于用户输入。
最后,dSLR的触发按钮连接到远程快门,就像我为CT扫描仪所做的那样(参见步骤7)。剪断遥控快门线。电线标记如下:
黄色 - 聚焦
红色 - 快门
白色 - 接地
为了聚焦镜头,黄色线必须接地。要拍摄照片,黄色和红色线必须接地。我将二极管和红色电缆连接到引脚12,然后我将另一个二极管和黄色电缆连接到引脚13.设置如DIY Hacks和How-Tos instructable中所述。
步骤8:获取千兆像素图像

附加的是gigapixel显微镜的代码。我使用Stepper库来控制带H桥的电机。在代码的开头,您必须指定显微镜的视野和您想要在每个方向上获取的图像数量。
例如,我制作的显微镜的视野约为8.2mm x 5.5mm。因此,我指示电机在x方向上移动8mm,在y方向上移位5mm。在每个方向上获取11个图像,总共121个图像用于完整的千兆像素图像(在步骤11中关于此的更多细节)。然后,代码计算电机需要按照此数量转换平台所需的步数。
这些阶段如何知道它们相对于电机的位置?如何在没有击中任何一端的情况下翻译?在设置代码中,我编写了一个函数,可以在每个方向上移动舞台,直到它打破IR发射器和IR接收器之间的路径。当IR接收器上的信号低于某个阈值时,电机停止。然后代码跟踪舞台相对于该原始位置的位置。编写代码使电机不会转换太远,这会使平台进入导螺杆的另一端。
一旦在每个方向上校准了舞台,舞台就会转移到中心。使用三脚架,我将我的dSLR显微镜放在舞台上。将相机区域与样品台上的交叉线对齐非常重要。一旦舞台与相机对齐,我用一些画家的胶带将舞台录下,然后将样品放在舞台上。用三脚架z方向调整焦点。然后用户按下按钮开始采集。舞台转换为左下角,触发相机。然后光栅扫描样品,然后相机在每个位置拍摄照片。
还附上了一些用于排除电机和红外传感器故障的代码。
步骤9:拼接图像




获取所有图像后,您现在面对将它们拼接在一起的挑战。处理图像拼接的一种方法是手动对齐图形程序中的所有图像(我使用的是Autodesk的图形)。这肯定会起作用,但它可能是一个痛苦的过程,并且图像的边缘在千兆像素图像中是显而易见的。
另一个选择是使用图像处理技术自动将图像拼接在一起。该想法是在相邻图像的重叠部分中找到类似的特征,然后对图像应用平移变换,使得图像彼此对齐。最后,通过将重叠部分乘以线性权重因子并将它们加在一起,可以将边缘混合在一起。如果您不熟悉图像处理,这可能是一个令人生畏的算法。我在问题上工作了一段时间,但我无法获得完全可靠的结果。该算法最擅长于具有非常相似特征的样本,例如杂志图像中的点。附件是我在Matlab中编写的代码,但它需要一些工作。
最后一个选项是使用千兆像素摄影拼接程序。我没有任何建议,但我知道他们在那里。
第10步:显微镜性能


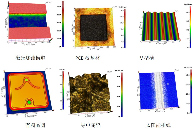
如果您错过了,结果如下:杂志图片,钩针桌布和各种电子产品。
系统的规格列于上表中。我尝试使用28mm和50mm焦距镜头进行成像。我根据衍射极限(约6μm)估算了系统的最佳分辨率。实际上很难在没有高分辨率目标的情况下进行实验测试。我尝试打印这个大幅面摄影论坛上列出的矢量文件,但我受打印机分辨率的限制。我打印输出的最佳结果是系统的分辨率《40μm。我还在样品上寻找小而孤立的特征。杂志印刷中最小的特征是墨点,我估计也是大约40μm,所以我不能用它来更好地估算分辨率。电子产品中有一些小的草皮,非常孤立。因为我知道视场,我可以计算占用小凹坑的像素数来估算分辨率,大约10-15μm。
总的来说,我对系统的性能感到满意,但是如果您想尝试这个项目,我会有一些注释。
舞台的稳定性:首先,获得高质量的线性平台组件。我使用的组件比我想象的要多得多。我只使用套件中的一个滑块安装座用于每个杆,所以这可能就是为什么舞台感觉不太稳定。这个阶段对我来说效果很好,但对于更高放大倍率的系统来说,这将成为一个更大的问题。
更高分辨率的光学器件同样的想法可以用于更高倍率的显微镜。但是,需要具有更精细步长的小型电动机。例如,使用此dSLR放大20倍将导致1mm的视野(如果显微镜可以在没有渐晕的情况下对大型系统进行成像)。 Electronupdate使用CD播放器中的步进电机,用于更高倍率的显微镜。另一个折衷方案是浅景深,这意味着成像仅限于薄样本,你需要在z方向上有更精细的平移机制。
三脚架的稳定性:使用更稳定的摄像机支架,该系统可以更好地工作。镜头系统很重,三脚架从其设计位置倾斜90度。我不得不用三脚架的脚压下来以帮助稳定。快门也可以晃动相机足以模糊图像。
-
显微镜
+关注
关注
0文章
549浏览量
23001
发布评论请先 登录
相关推荐
共聚焦激光显微镜对比超分辨显微镜
德国进口蔡司体视显微镜的使用方法

新品上市 | 优可测超景深数码显微镜AH-3000系列:开启智能显微系统新时代

开尔文探针力显微镜检测的是什么信号
具有非常高数值孔径的反射显微镜系统
照明显微镜激光引擎
共聚焦、光学显微镜与测量显微镜的区分
显微成像与精密测量:共聚焦、光学显微镜与测量显微镜的区分
共聚焦显微镜和激光共聚焦显微镜的区别详解
教你该如何操作体视显微镜






 工商网监
工商网监
评论