 分页式显示器的制作
分页式显示器的制作
步骤1:准备工具
制作这个项目需要做几件事:
安装了打印机和XOD IDE的家用电脑。
剪刀。
快船。
一组船员。
钻头和钻头。
Dremel切割金属轴。
M3螺纹攻丝。
焊接工具。
步骤2:准备。 Lasser Cutting。
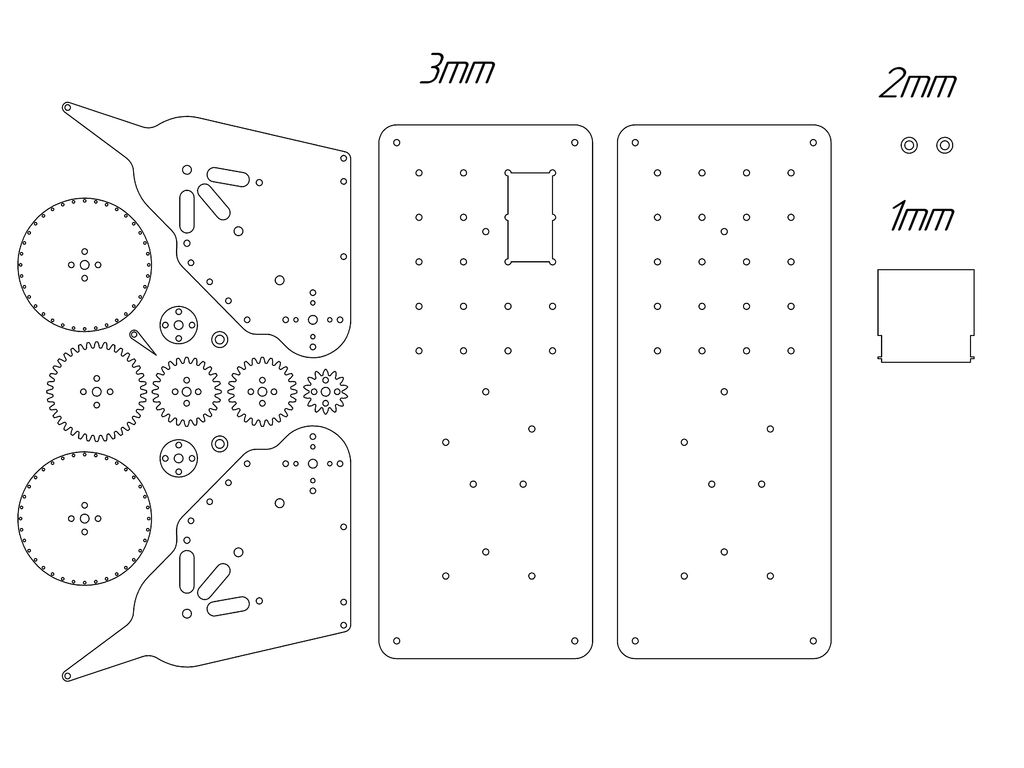
我选择有机玻璃作为身体部位和激光切割制造的材料。以下是您需要自行订购或制作的4位数显示器的最小部件列表:
磁盘3mm厚度 - 8件。
面板3毫米厚度 - 8件。
3mm厚的大齿轮 - 4件。
中型齿轮3mm厚度 - 8件。
3mm厚的小齿轮 - 4件。
齿套3mm厚 - 8件。
袖子3毫米厚度 - 8件。
袖子2毫米厚度 - 8件。
限制器3mm厚度 - 4件。
翻转1毫米厚度 - 144件。
前电子面板3毫米厚 - 1件。
背面电子面板厚度3mm - 1件。
附上DXF CAD文件。
第3步:准备。购物清单。
您需要获取的最低要求清单。请记住,这不是强制性列表,可以替换组件。
电子产品:
单极步进电机Nema 17 1.8deg 12V 42x42x48mm - 4件。链接
数字线跟踪传感器 - 4件。链接
Arduino mega 2560 - 1件。链接
Arduino步进驱动模块 - 4件。链接
Arduino ESP 8266 AT-modem模块 - 1件。链接
按钮 - 2件。链接
Arduino原型盾 - 3件。链接
原型线 - 1包。链接
USB(A - B)线 - 1个。链接
金属件:
钢角支撑约30x30mm - 3件。链接
直径5mm的钢或黄铜棒/轴,长度约为1米。
PCB支撑和垫片:
PCB黄铜或钢制六角形支座M3公头 - 母头长25mm - 16件。链接
PCB黄铜或钢制六角形支座M3母头 - 母头长25mm - 16件。链接
PCB黄铜或钢制六角形支座M3公头 - 母头40mm长度 - 16件。链接
PCB黄铜或钢制六角形支座M3公头 - 母头32mm长度 - 12件。链接
PCB黄铜或钢制六角形支座M3公头 - 母头长10mm - 12件。链接
PCB尼龙六角支架M3公头 - 母头8mm长度 - 16-20件。链接
硬件:
六角螺母M3(DIN 934)。
弹簧垫圈M3(DIN 127)。
垫圈M3(DIN 125)。
螺钉M3(DIN7985/DIN 84/DIN 912)长度为16mm。
螺钉M3(DIN7985/DIN 84/DIN 912)长度为10mm。
螺钉M3(DIN7985/DIN 84/DIN 912)长度为6-8mm。
其他:
自粘纸 - 1件。链接
尼龙拉链带 - 1个装。链接
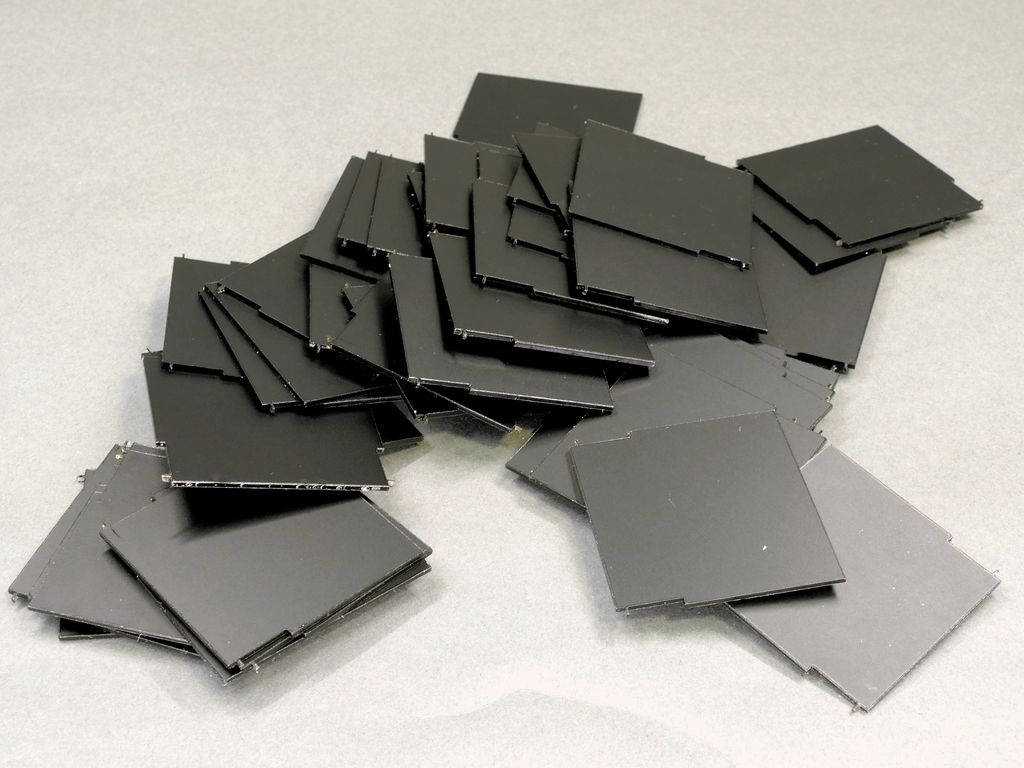
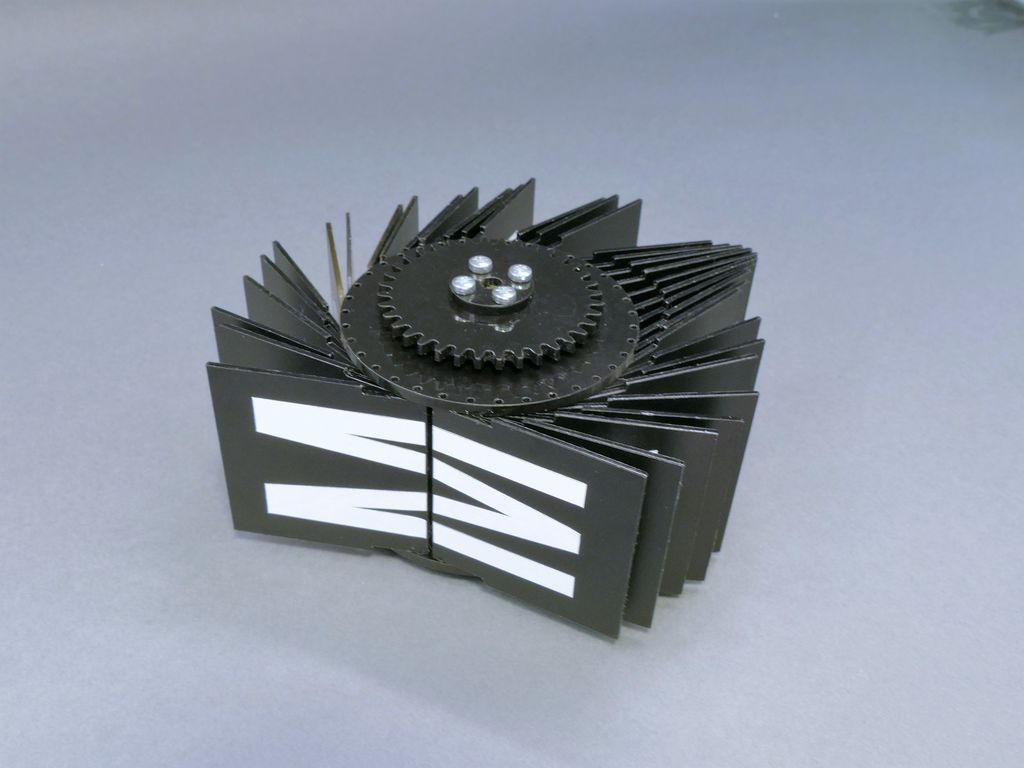
第4步:力学。制作襟翼。



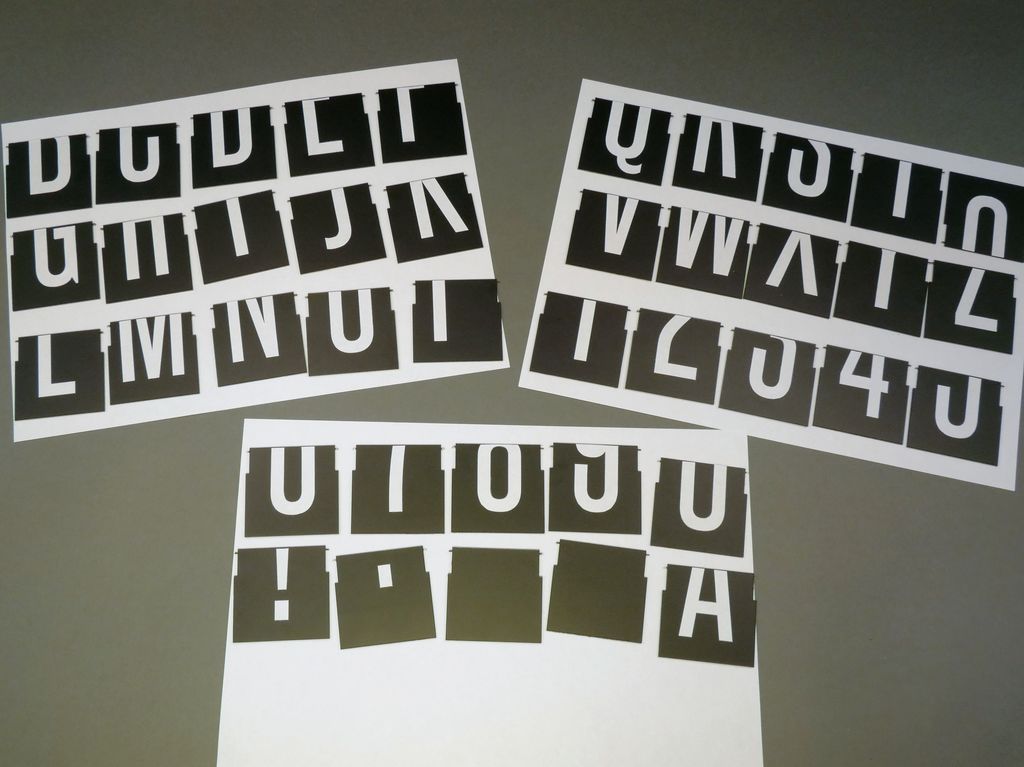
字符
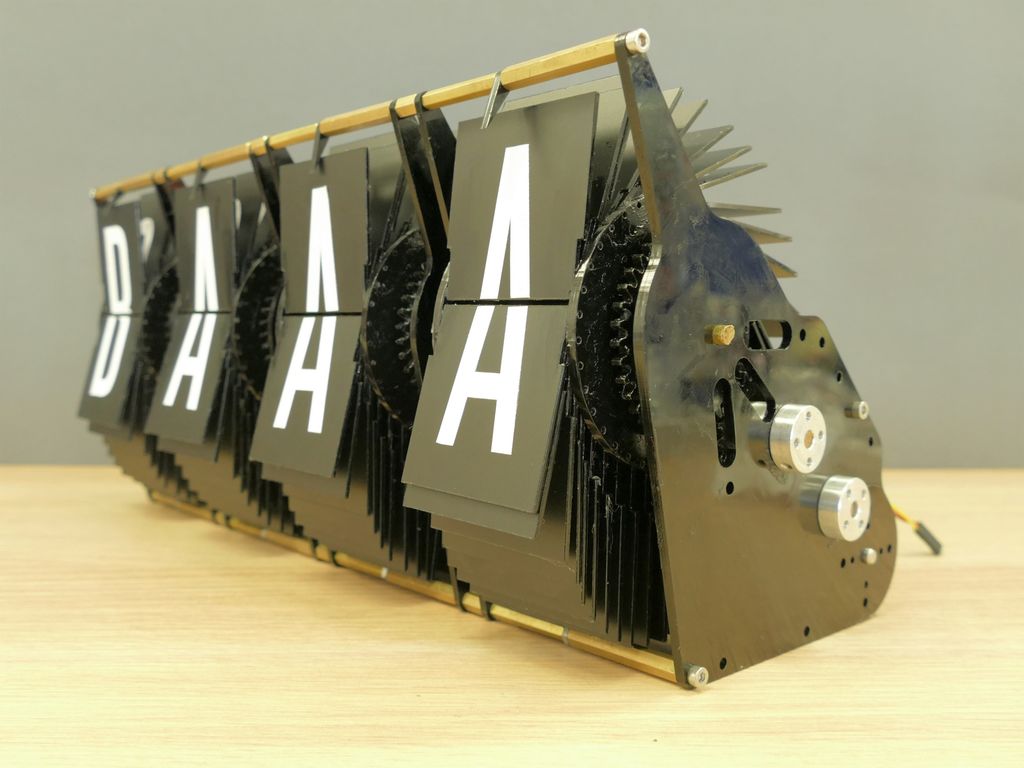
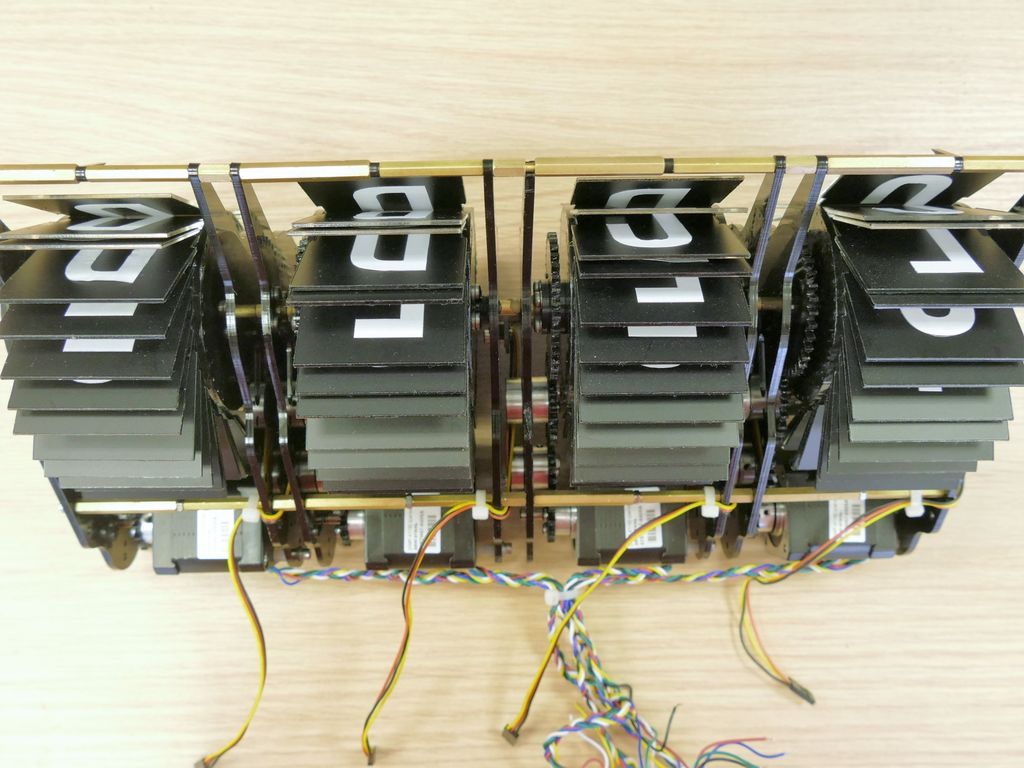
在此项目中,显示屏的数字容量为4.显示屏采用模块化结构,可轻松扩展。您可以随意增加或减少位数。
每个数字有36个襟翼:
26个襟翼用于拉丁字母(ABCDEFGHIJKLMNOPQRSTU VWXYZ)。
9个襟翼用于数字(1 2 3 4 5 6 7 8 9)。
1个空襟翼用于间距(用于显示零我使用‘O’字母)。
翻盖的正面有一个当前字符的顶部,背面有下一个字符的底部。
我用于字母的字体是“Steelfish rg”。你可以在这里找到它
材料清单
144襟翼。
我从1毫米透明有机玻璃清单上翻了一下两面都是黑色电影。您可以使用任何材料制作它们。
不要忘记增加翻转托盘圆盘中安装孔的直径如果要使用厚度超过1毫米的列表。对于翻转的制造商,我使用激光切割。
144(36 x 4)是最低数量,但我强烈建议你做更多。在我的情况下,翻盖安装在翻盖支架上的耳朵变得非常微弱,我打破了十几个翻转。
自粘纸。
我使用了Lomond的多功能白色自粘纸。一包50张就足够了。我确信很容易找到替代品。
流程
使用自粘印刷字母纸。带有1:1比例字母的pdf文件附在下面。
用剪刀剪掉字母顶部的轮廓。例如“A”的顶部。
在必要的地方将“A”字母的顶部粘贴到翻盖的正面。
剪下下一个字母底部的轮廓。例如“B”的底部。
翻转翻盖并粘贴字母“B”的底部。
“A - B”翻盖准备就绪。对每个角色重复这些步骤。
我可以毫无疑问地说这是一个非常费力的过程。
如果你有机会打印角色两边的翻转,一定要使用它。
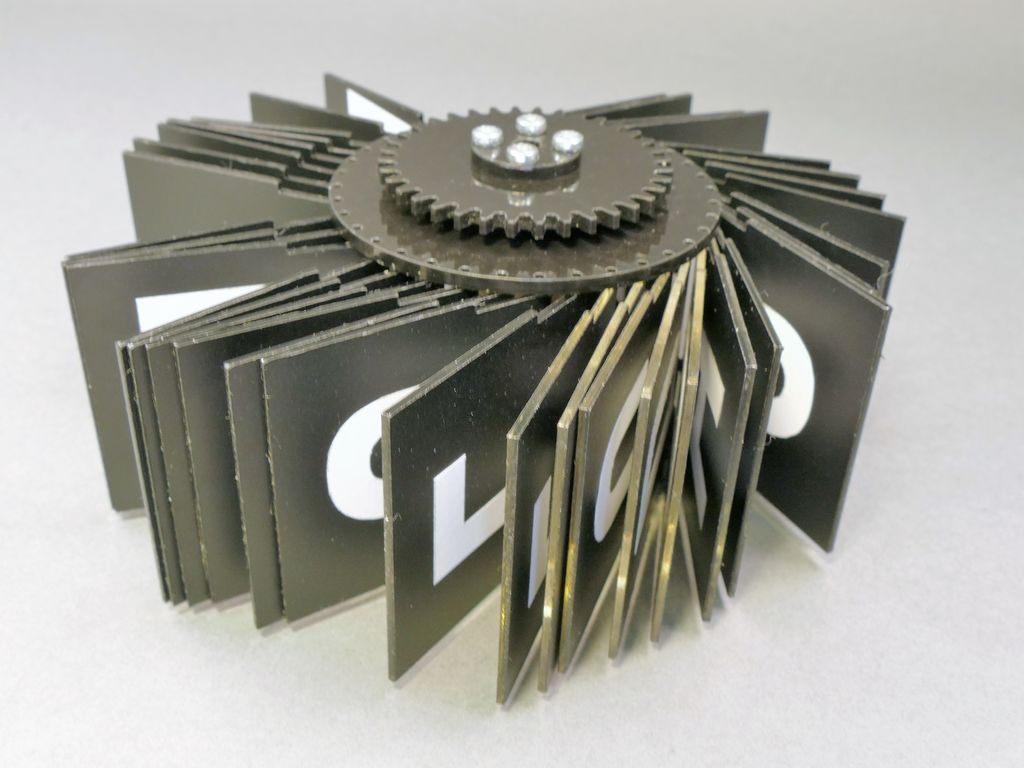
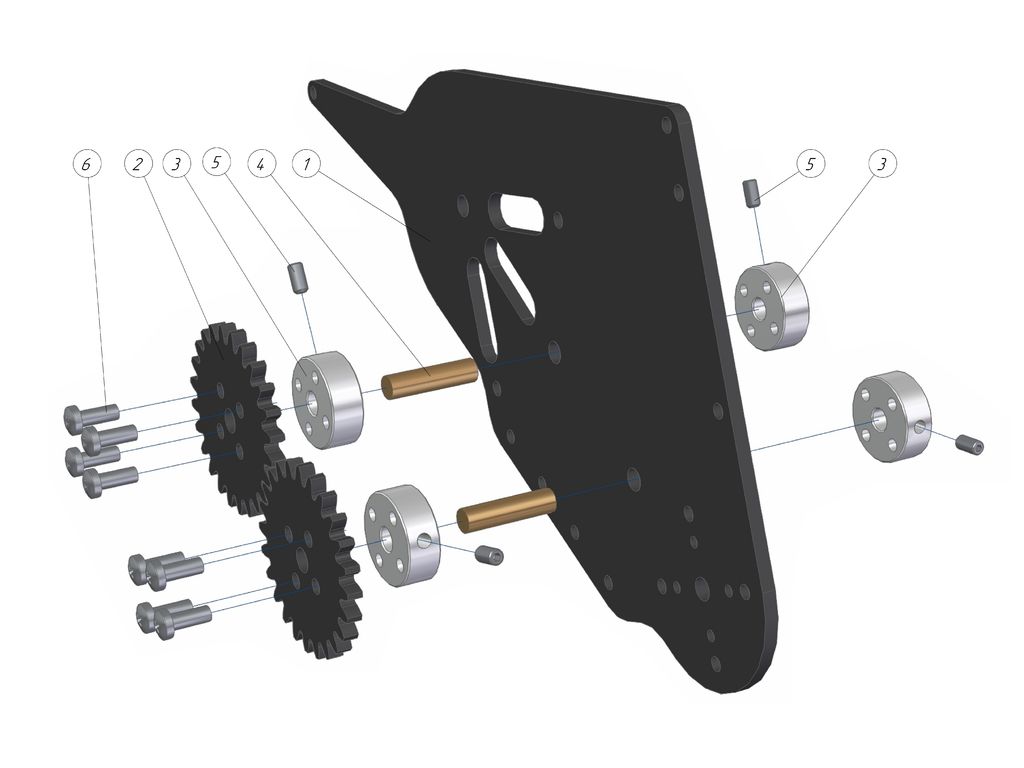
第五步:力学。组装翻转持有者。

材料清单
要组装一个翻转支架,您需要这个位置:
1。有机玻璃盘3毫米 - 2件。
2。有机玻璃齿轮套3mm - 2件。
3。大型有机玻璃齿轮3mm - 1件。
4。 PCB六角支架M3公母 - 长25mm - 4件。
5。 PCB六角支架M3母 - 母25mm长 - 4件。
6。垫圈M3(DIN 125) - 12件。
7。螺钉M3(DIN7985/DIN 84/DIN 912)10mm长度 - 4件。
8。螺钉M3(DIN7985/DIN 84/DIN 912)16mm长度 - 4件。
9。 36翻转上一步。
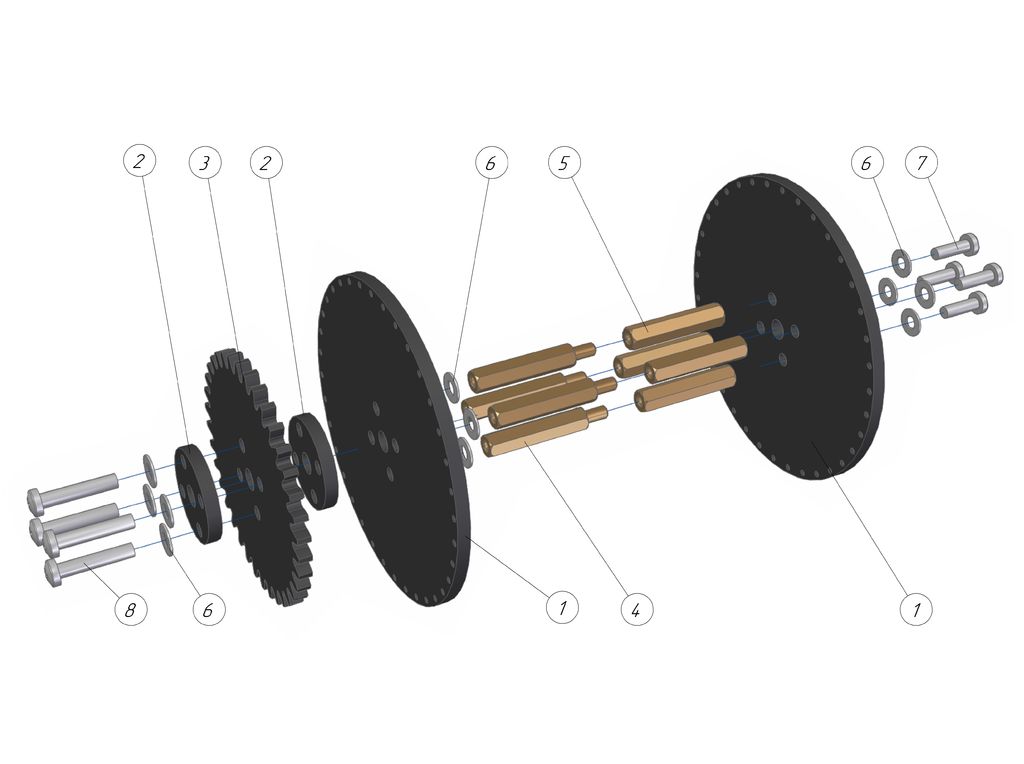
组装过程
查看草图(图1和图2)。图像将帮助您进行组装。
拧紧支架(位置4)和支架(位置5)。
Fasten使用洗涤(pos.6)和16mm螺丝(pos.8)的支架,左盘(pos.1),套筒(pos.2),齿轮(pos.3),如草图所示。
使用洗涤液(位置6)和10mm螺丝(位置7)将右侧圆盘(位置1)用支架拧紧,但不要拧紧。
用耳朵夹住磁盘(pos.1)之间的所有翻转(pos.9)。
拧紧螺丝(位置7) 。
确保所有翻转都在孔中自由旋转而不会卡住。
粘贴一条自粘纸在翻盖上。带条的位置设置翻盖的默认位置(图7)。
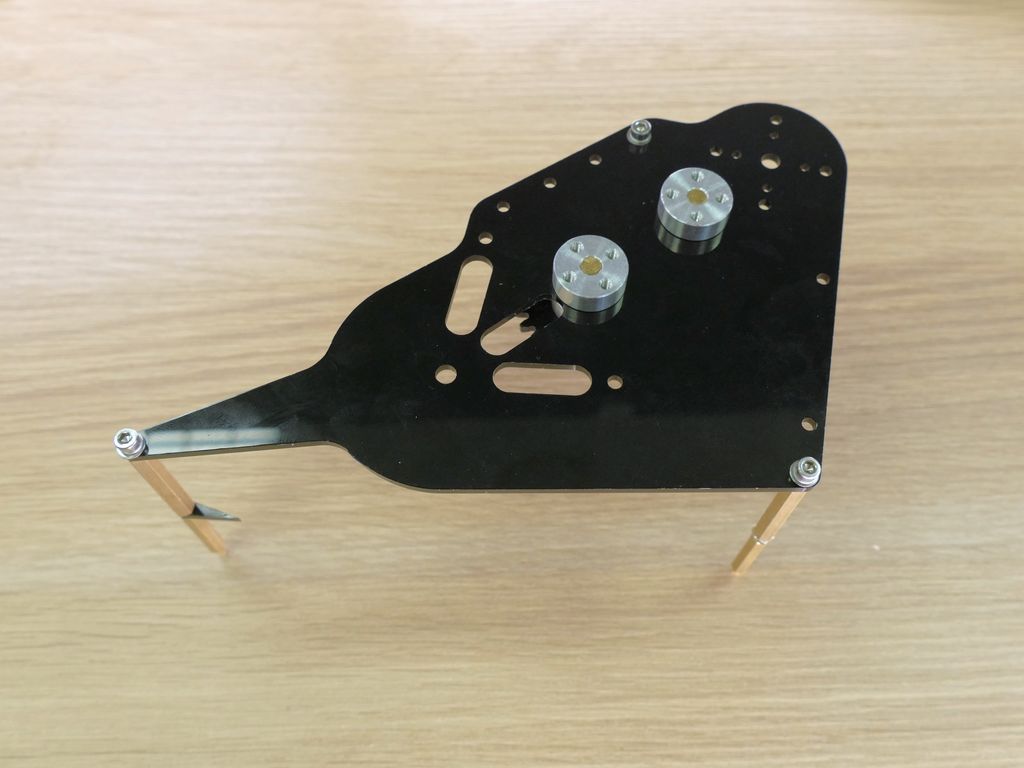
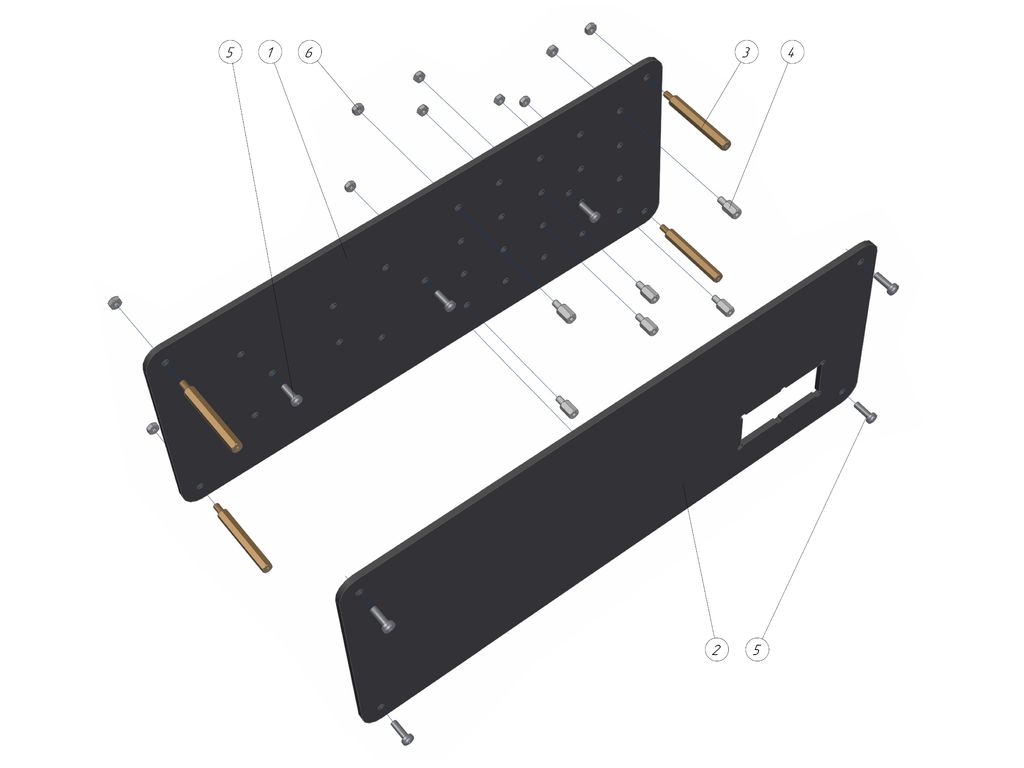
第6步:力学。组装左侧面板。
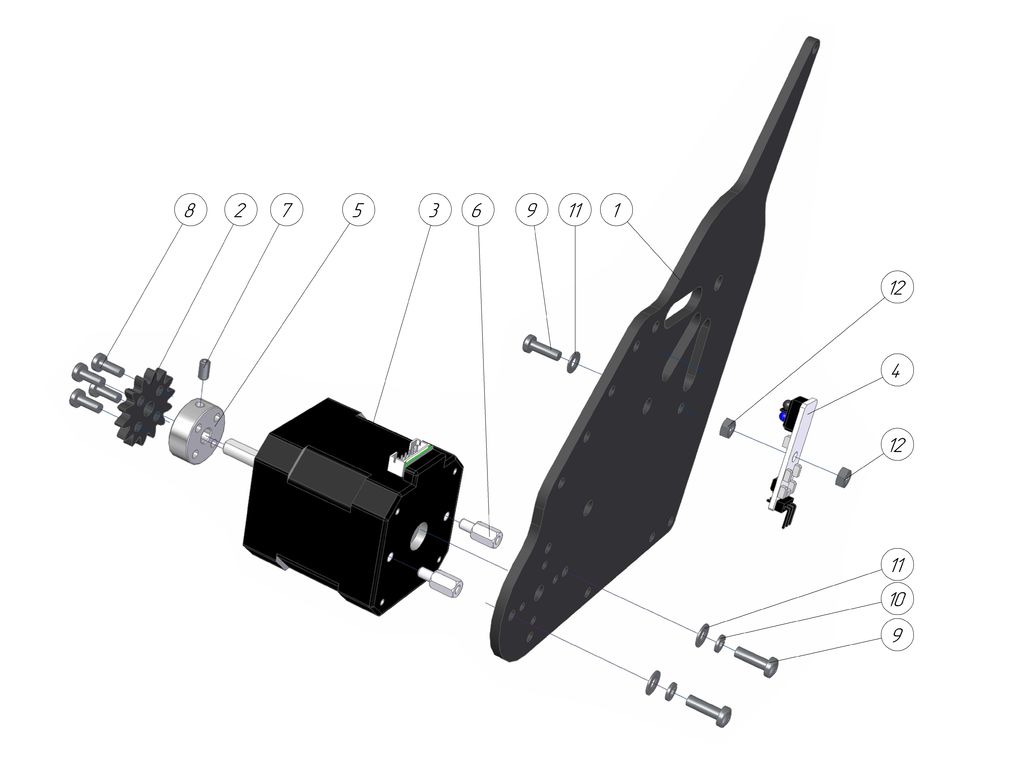



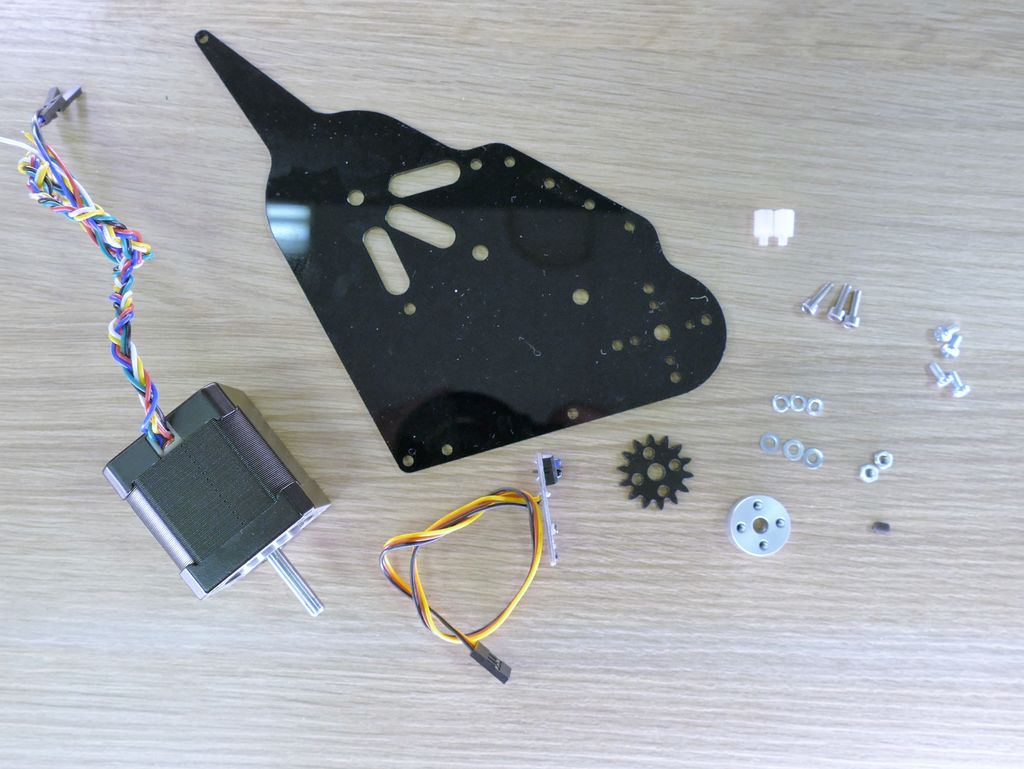




材料清单
要组装一个左侧面板,您需要以下位置:
1。有机玻璃面板3mm - 1件。
2。小型有机玻璃齿轮3mm - 1件。
3。单极步进电机Nema 17 1.8deg 12V 42x42x48mm - 1件。
4。数字线跟踪传感器 - 1件。
5。铝制安装轮毂,用于5mm轴,带有四个M3孔 - 1个。
6。 PCB尼龙六角支架M3公母 - 长8mm - 2件。
7。内六角固定螺钉(ISO 4026/EU 24026/DIN 913) - 1件。
8。螺钉M3(DIN7985/DIN 84/DIN 912)6-8mm长度 - 4件。
9.螺钉M3(DIN7985/DIN 84/DIN 912)10mm长度 - 3件。
10.弹簧垫圈M3(DIN 127) - 2件。
11.垫圈M3(DIN 125) - 3件。
12.六角螺母M3(DIN 934) - 2件。
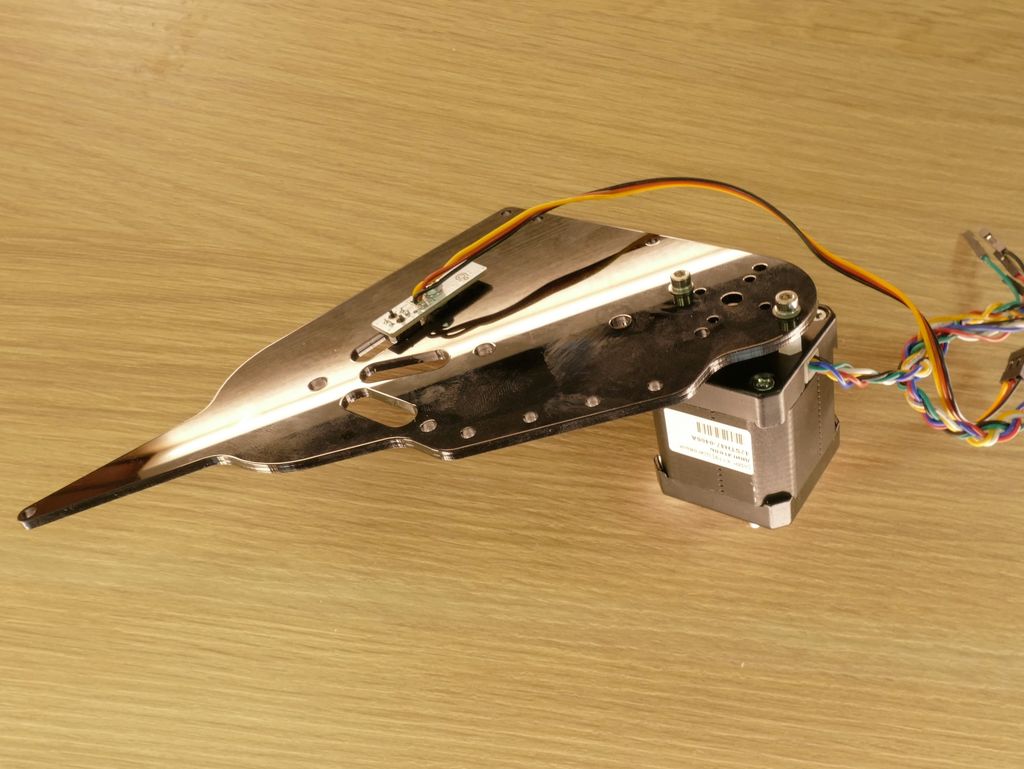
准备工作
从步进电机(位置3)上拆下4个长螺钉并取下后盖
在后盖上制作两个M3尺寸的水龙头(图2)。孔之间的大致距离应为30.5mm。
重新组装步进电机(位置3)。
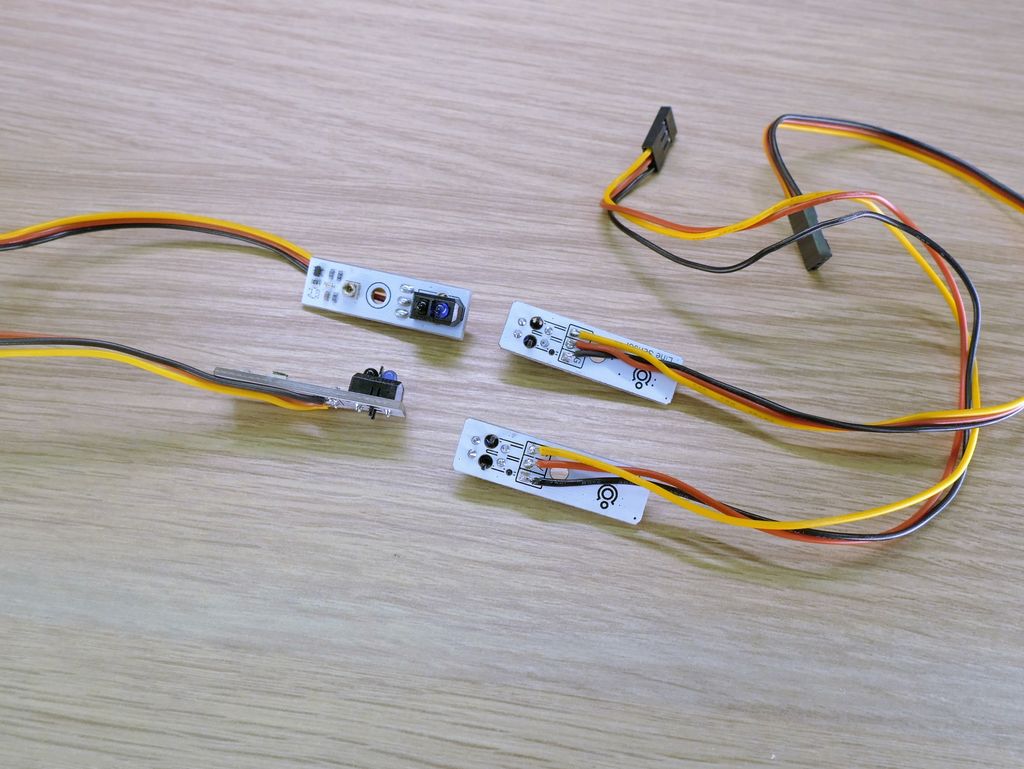
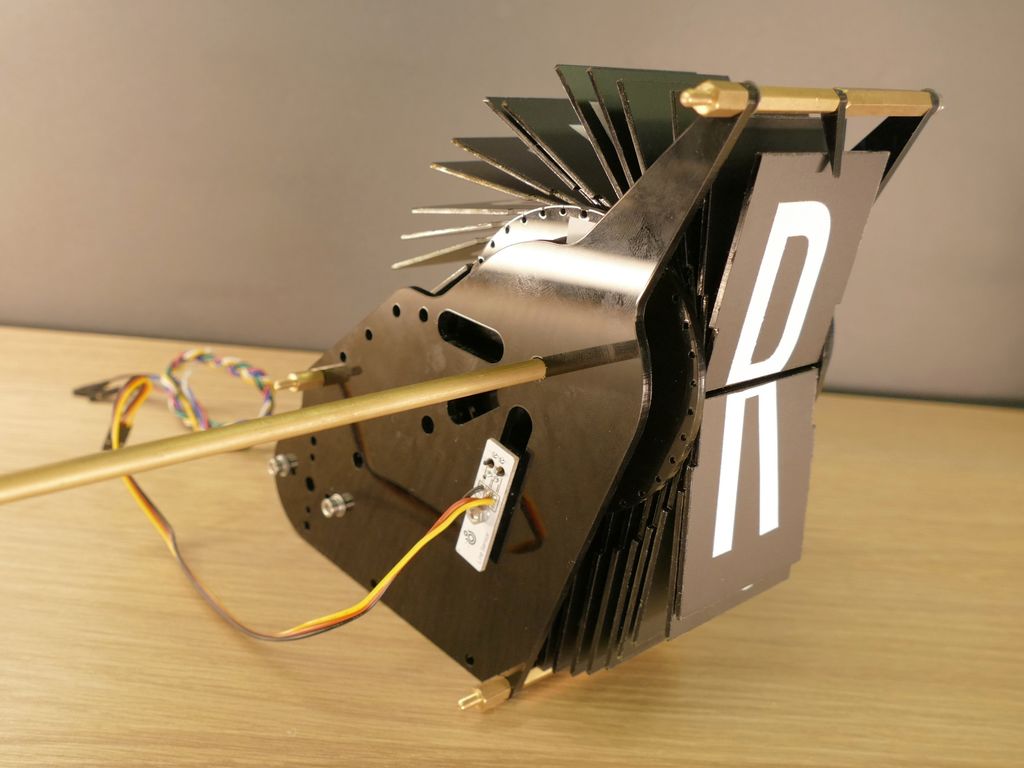
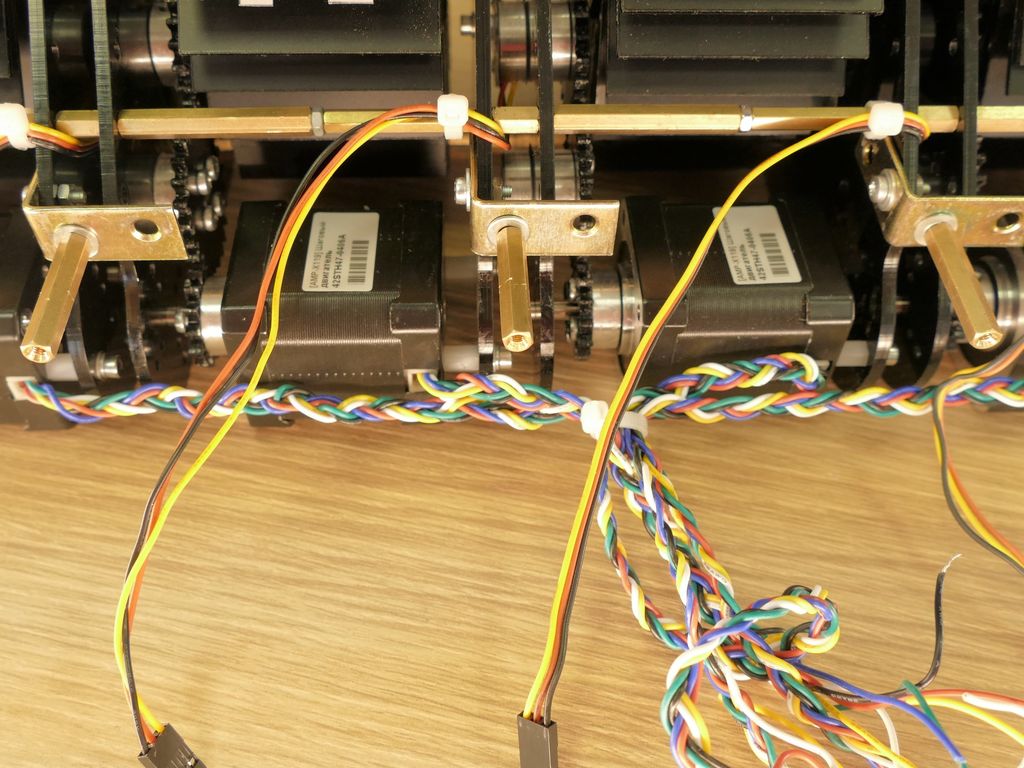
如果有必要,请更正线路跟踪器传感器这样它可以适合面板(pos.1)。我不得不拆开传感器PCB上的引脚,这样它们就不会干扰。此外,我将电线直接焊接到PCB上(图3和图4)可能你不需要修理你得到的传感器。
缩短尼龙支架(pos.6)这样它们不会损坏电机线圈(图5)。
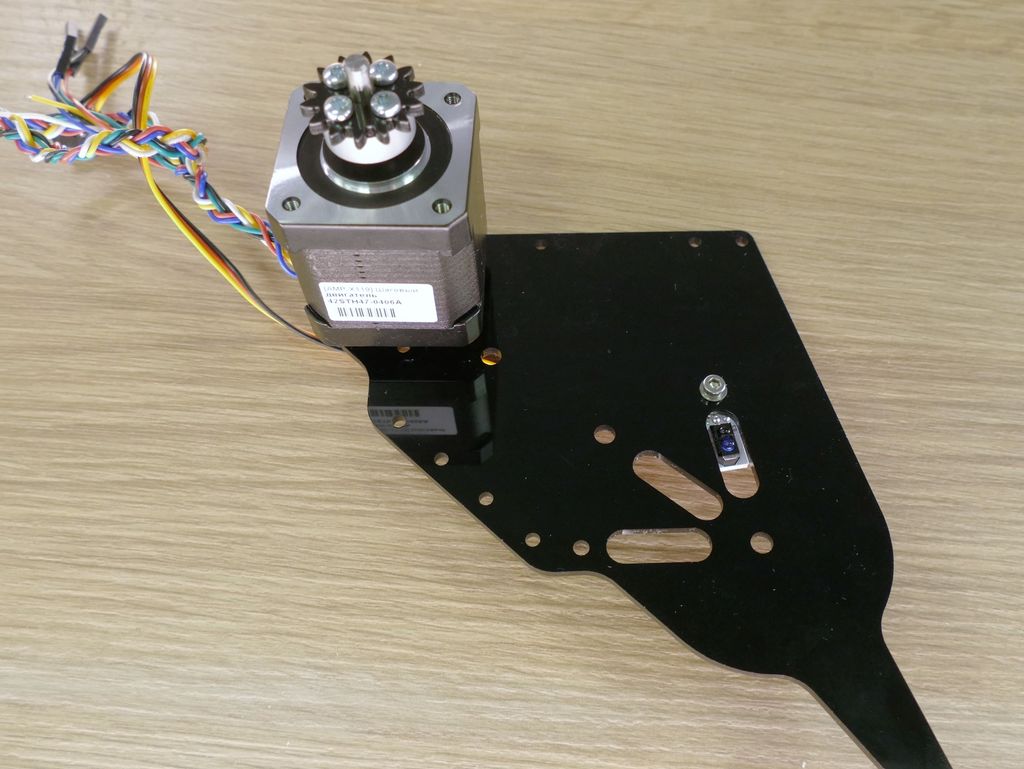
装配过程
看看草图(图1)。图像将帮助您进行组装。
使用螺母(位置12),螺钉(位置9),垫圈(位置11)将线传感器(位置4)固定到面板(位置1)。
将尼龙支架(位置6)拧到步进机(位置3)。
用步进机(pos.3)固定面板(位置1)使用螺丝(位置9)和清洗(位置10和位置11)。
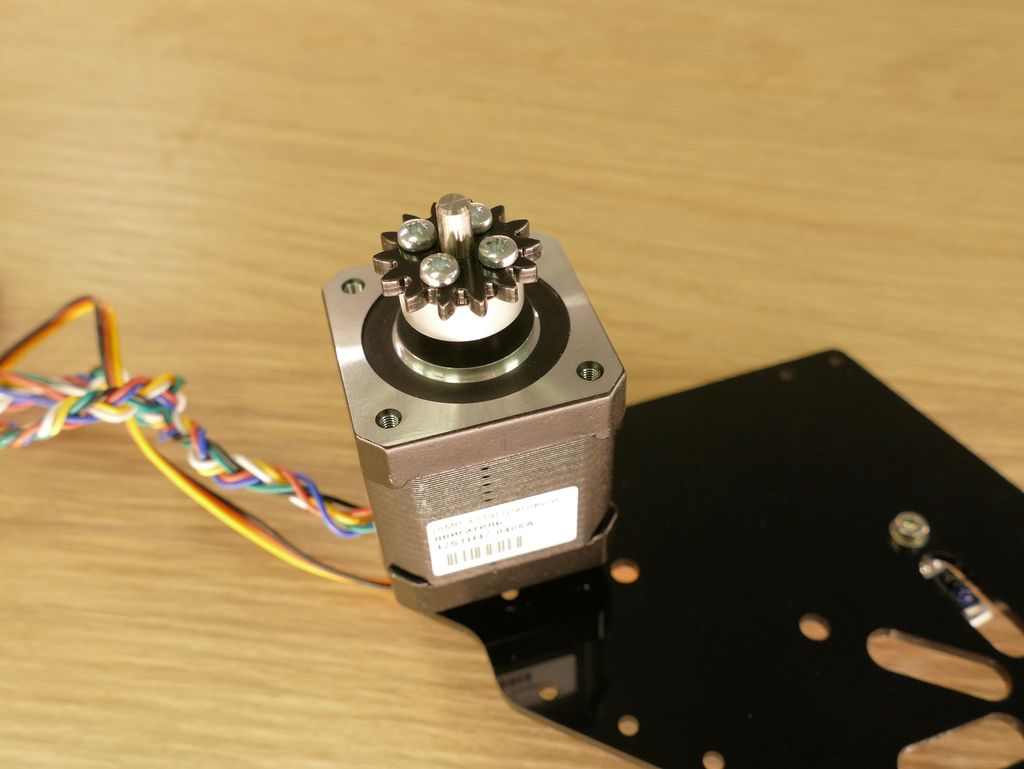
拧小有机玻璃齿轮(位置2)使用螺钉(位置8)安装轮毂(位置5)。
使用内六角螺钉将安装轮毂(位置5)与步进轴固定在一起( pos.7)。
对步进轴进行一些旋转,以确保支座(位置6)不会干扰步进线圈。
第7步:力学。组装右侧面板。




准备
从直径5mm的棒上切下约20mm长的轴。
材料清单
要组装一个右侧面板,您需要这个位置:
1。有机玻璃面板3mm - 1件。
2。中型有机玻璃齿轮3mm - 2件。
3。铝制安装轮毂,用于5mm轴,带有四个M3孔 - 4个。
4。轴直径5mm,长约20mm - 2件。
5。内六角固定螺钉(ISO 4026/EU 24026/DIN 913) - 4件。
6。螺钉M3(DIN7985/DIN 84/DIN 912)6-8mm长度 - 8件。
装配过程
查看草图(图1)。图像将帮助您进行组装。
使用螺钉(位置6)将两个中型有机玻璃齿轮(位置2)拧到安装轮毂(位置3)上。
使用内六角螺钉(位置5)将安装轮毂(位置5)与轴(位置4)固定在一起。
将轴(位置4)插入面板(位置1)并连接齿轮(位置2)。
使用安装轮毂(位置5)和内六角螺钉(位置)将轴(位置4)固定在面板(pos.1)的另一侧。 5)。
确保齿轮自由旋转而不会卡住。
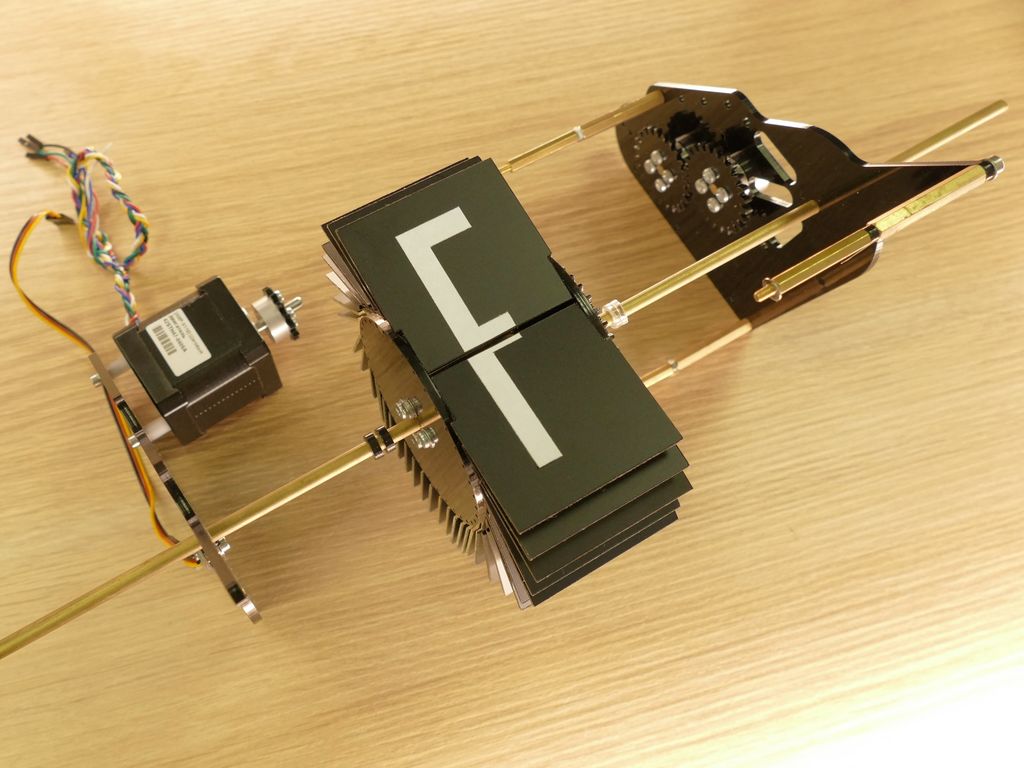
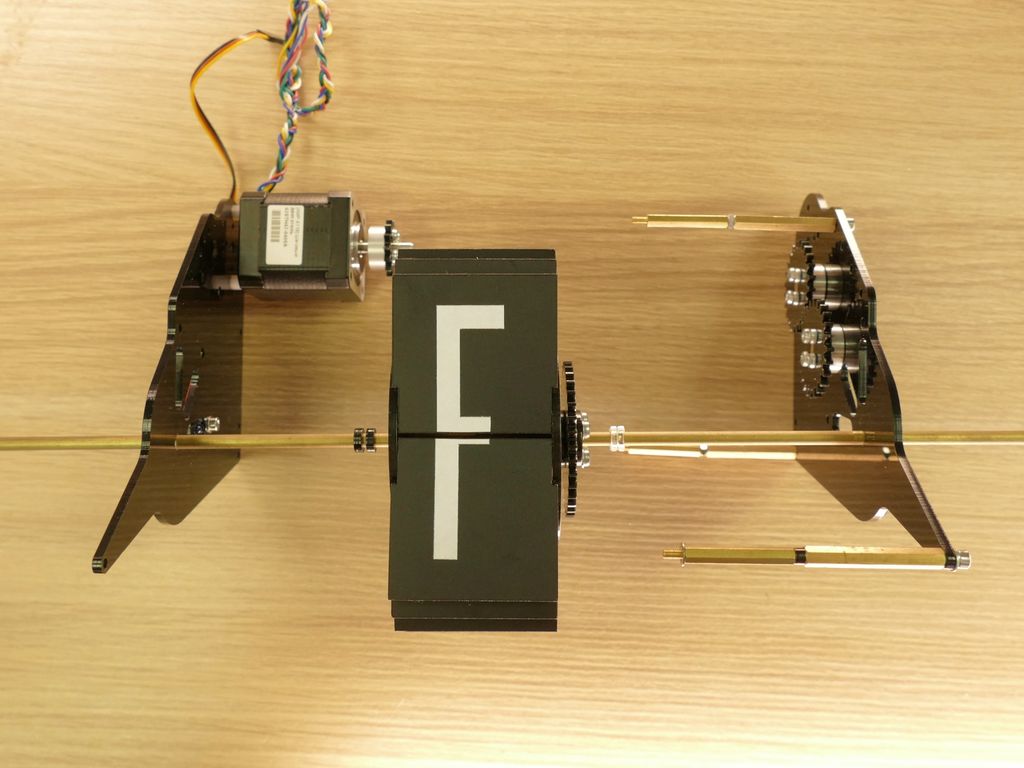
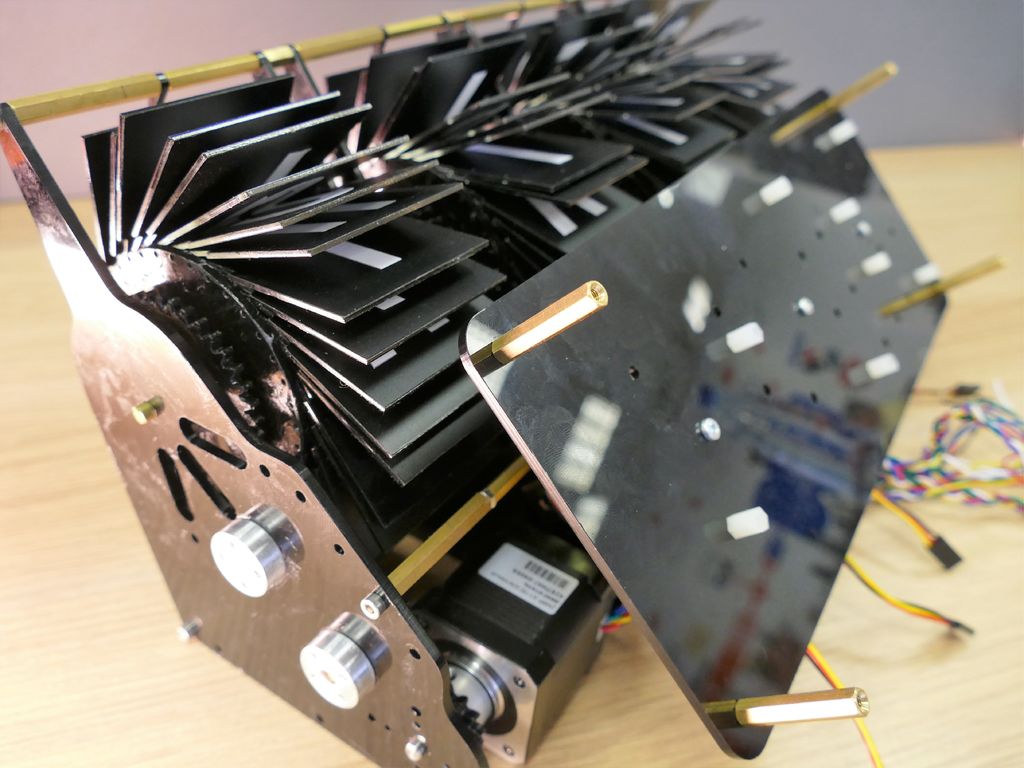
步骤8:力学。组装数字。




准备工作
从5毫米直径切割360毫米轴棒材。
材料清单
要组装一个数字,您需要这个位置:
1。组装翻转支架 - 1件。
2。组装左侧面板 - 1件。
3。组装右侧面板 - 1件。
4。有机玻璃翻转限制器3mm - 1件。
5。有机玻璃套管3mm - 2件。
6。有机玻璃套管2mm - 2件。
7。 PCB六角支架M3公母 - 长40mm - 3件。
8。 PCB六角支架M3公头 - 母头32mm长度 - 3件。
9。 PCB六角支架M3公头 - 母头10mm长或M3螺母和M3 10mm螺钉(取决于手指的位置:第一个,最后一个或中间) - 3个。
10。六角螺母M3(DIN 934) - 2件。
11。钢/黄铜轴。长度取决于数字计数。在这个项目中长度为360mm - 1件。
装配过程
查看草图(图1)。图像将帮助您进行组装。
将两个支座(位置7)拧到支座(位置8)和六角螺母(位置10)上。
固定有机玻璃翻转限制器( pos.4)在一个支座(pos.7)和支座(pos.8)之间。
使用支架将装配好的支架与右侧面板(位置3)固定在一起(位置9)或M3 10mm螺丝。
将翻转支架(位置1)安装在轴(位置11)上。
将两个3毫米套管(位置5)安装在翻转支架左侧的轴(位置11)上。
安装2个2mm在翻转支架右侧的轴(位置11)上的套筒(位置6)。
将轴插入左右面板(pos.2)和pos.3)。
使用支架(pos.9)用面板(pos.2和pos.3)夹住翻盖(pos.1)或M3 10毫米螺钉。
用手旋转步进电机的轴,确保所有齿轮自由旋转而不会卡住。如有必要,润滑变速箱。任何塑料或凡士林的润滑剂都可以。
are调整限制器(位置4),使当前的顶部翻盖不会直立。不要用限制器强力按下翻盖。一个重要的力量会打破翻转的耳朵。
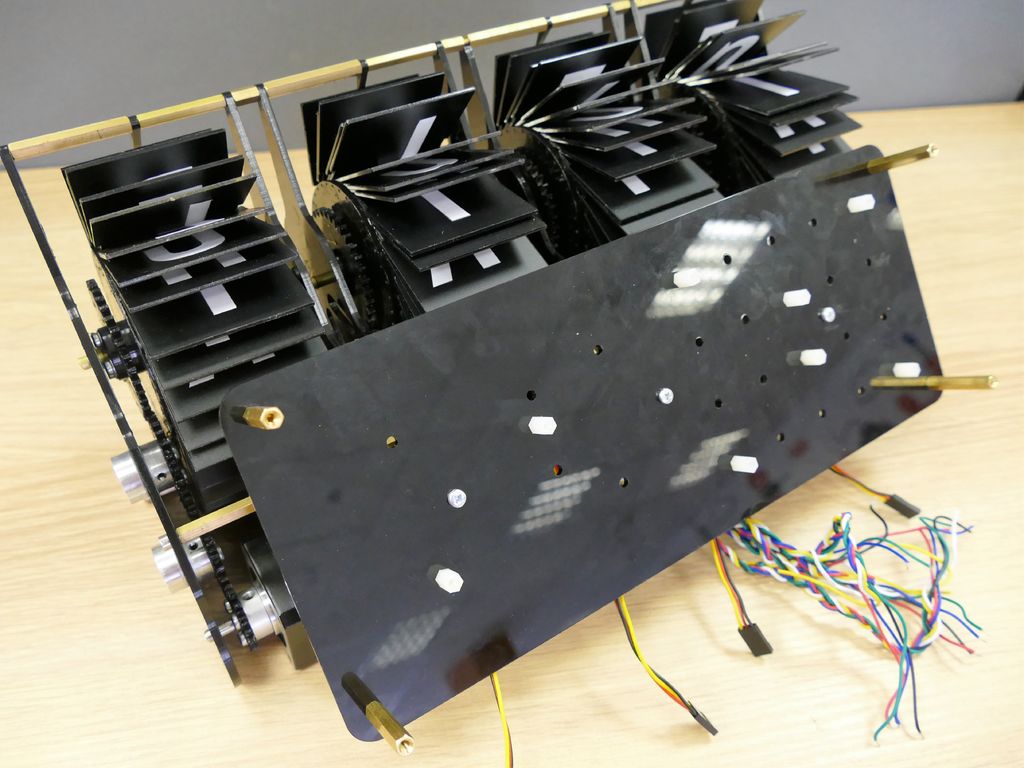
步骤9:力学。合并所有数字。




材料清单
可选:
1。螺钉M3(DIN7985/DIN 84/DIN 912)10mm长度 - 1件。
2。铝制安装轮毂,用于5mm轴,带有四个M3孔 - 1个。
3。内六角止动螺钉(ISO 4026/EU 24026/DIN 913) - 1件。
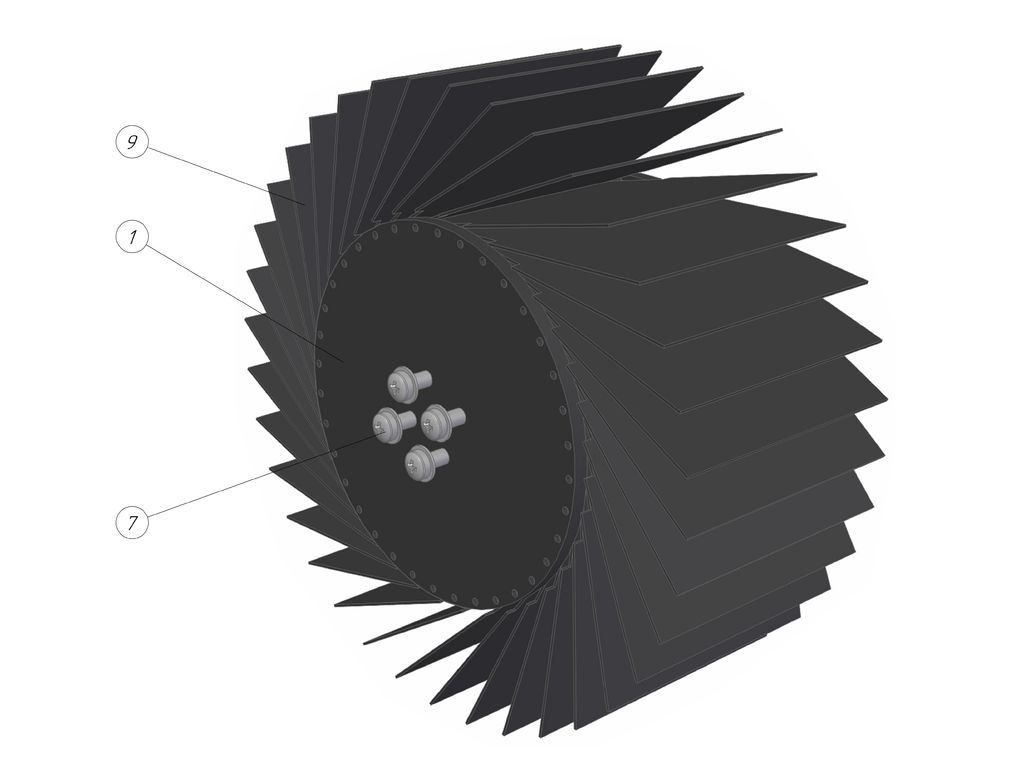
装配过程
完成每个数字的所有先前步骤。
完成显示链接数字。
为方便起见,电线可以用扎带固定。
可选:
主轴可以固定在其中一个面板上(图2),以防止旋转。
将安装轮毂安装到轴的边缘。/p》
用固定螺丝固定。
钻出面板上的3mm孔,使孔的轴重合安装轮毂中螺纹的轴线。
使用M3螺钉将安装轮毂固定在面板上。
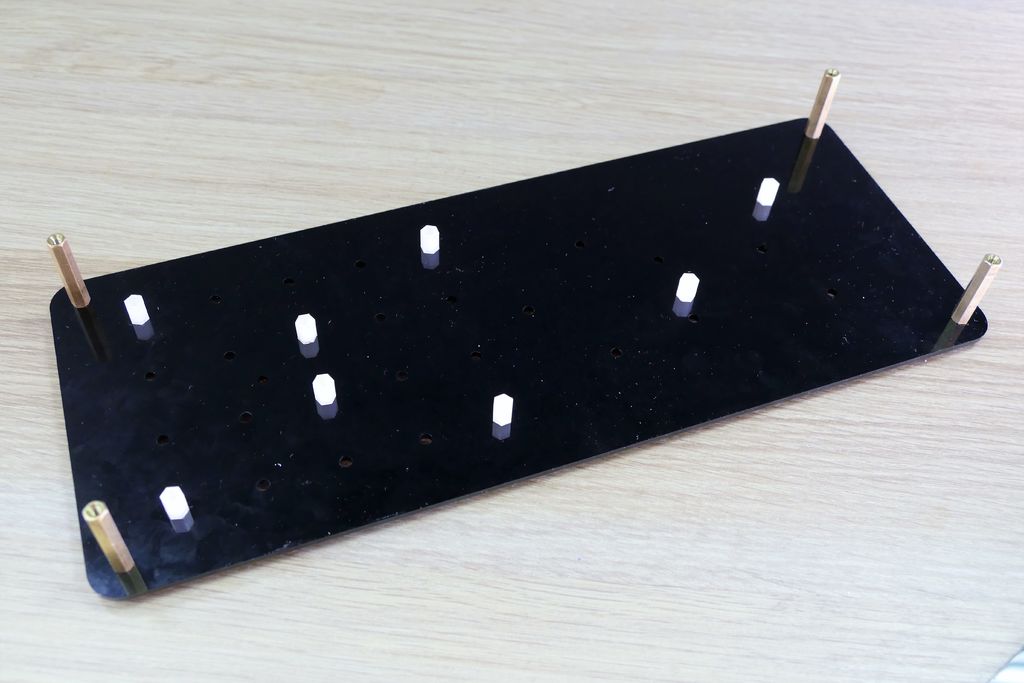
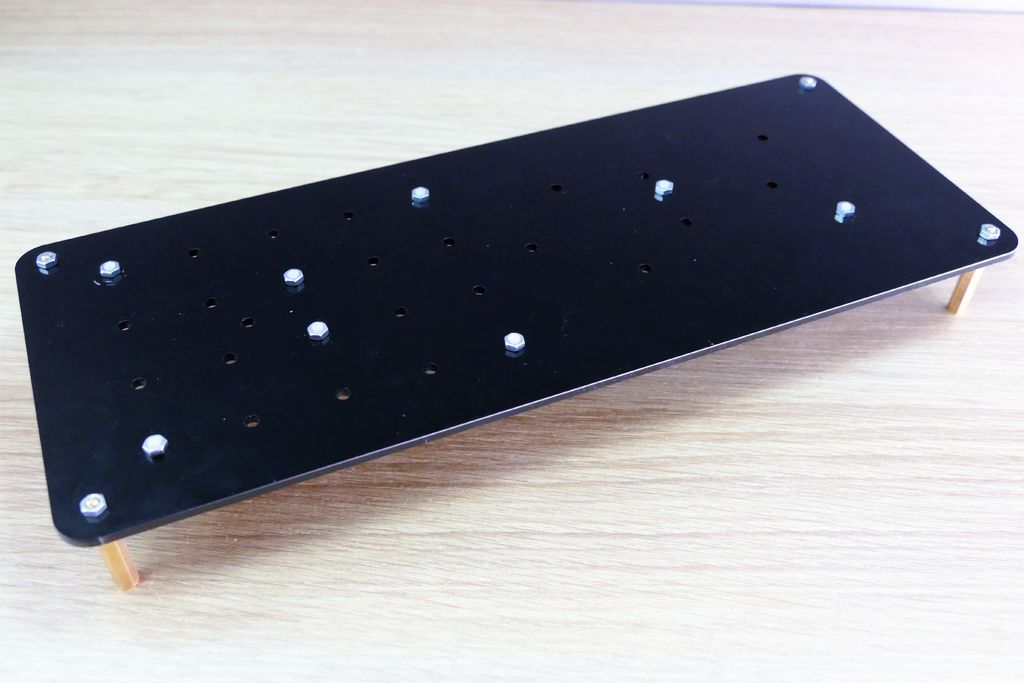
第10步:力学。使用电子设备安装面板。





您应该安装以将面板与电子元件连接。
材料清单
1。钢角支撑约30x30mm(pic.1) - 3件。
2。螺钉M3(DIN7985/DIN 84/DIN 912)10mm长度 - 6件。
3。垫圈M3(DIN 125) - 6件。
4。六角螺母M3(DIN 934) - 6件。
5。 PCB六角形支架M3公母 - 长度超过30mm - 3件。
准备
可选:
如果有必要,在支架上钻一个合适的3-3.5mm孔。
装配过程
使用螺母和螺钉将支座固定到支架上(图2)。
将组装好的支架拧到显示屏上(图4) ,图5,图6)使用螺母和螺钉。
将牙箍设置为所需的角度。
拧紧紧固件。
步骤11:电子设备。组装电子面板。


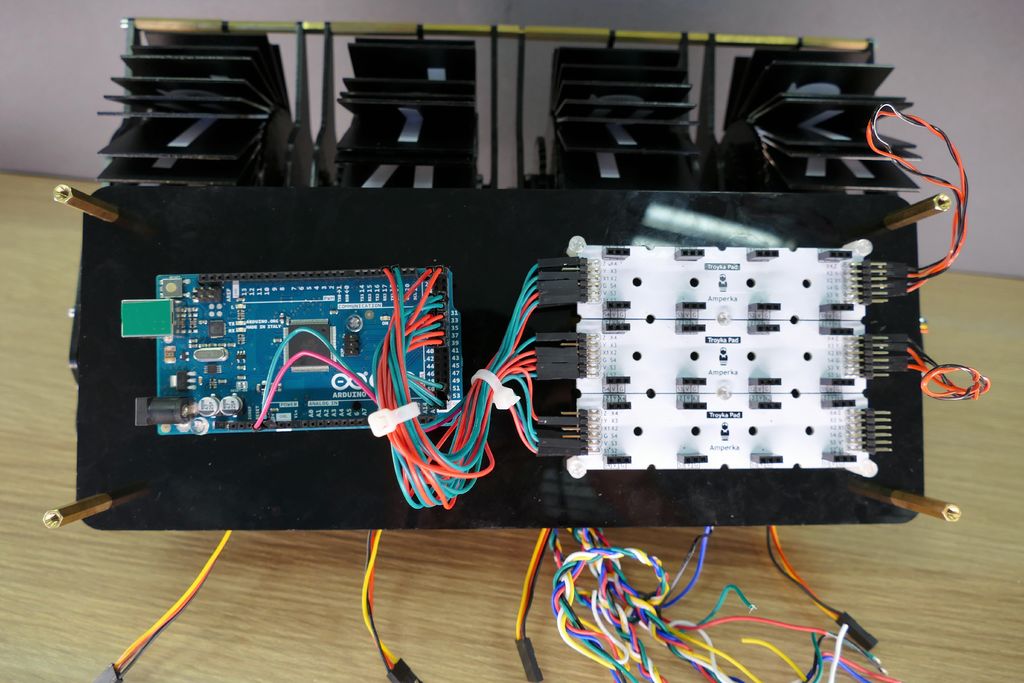
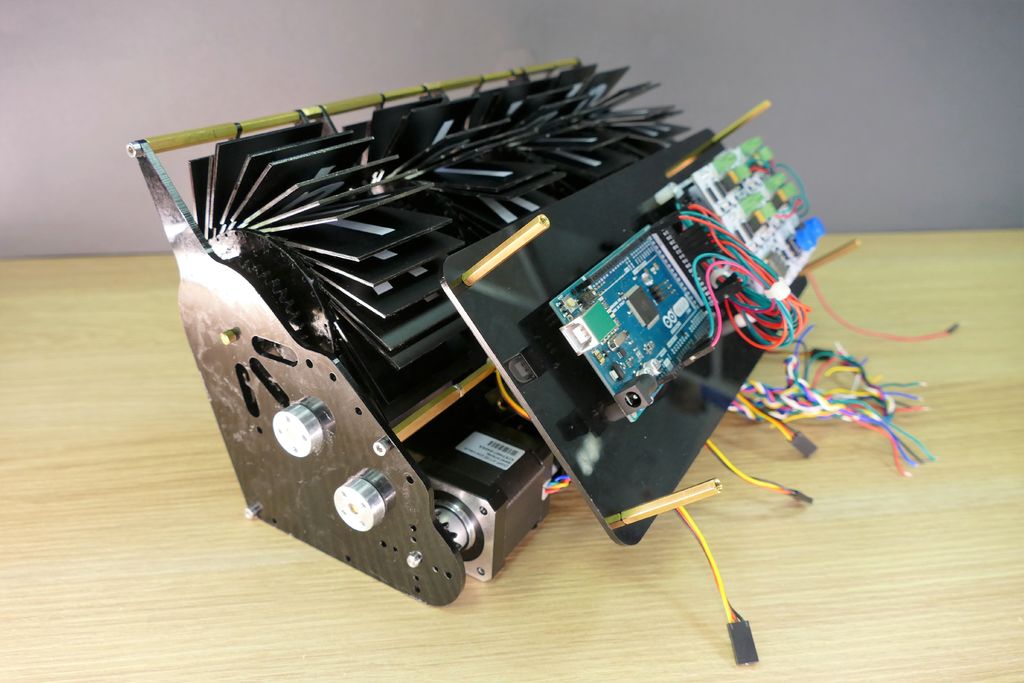
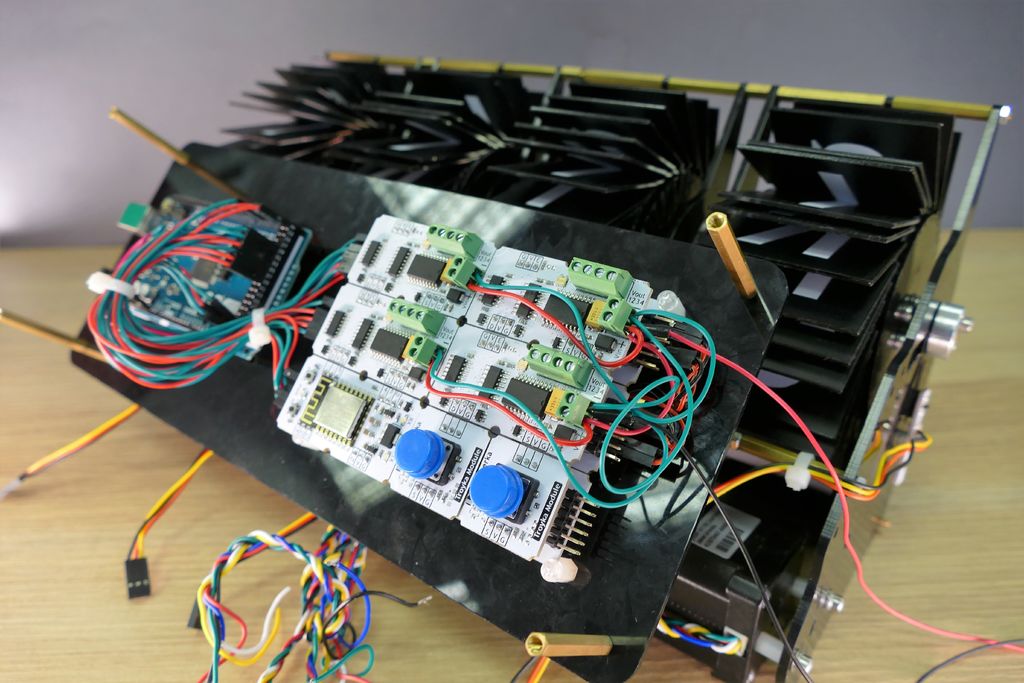

电子
为了制作电子产品,我使用了“Troyka”模块(图2)。这些模块不需要焊接,允许您简单快速地对任何设备进行原型设计。请注意,您不必使用与我使用的模块相同的模块。您可以使用任何其他控制板和任何其他防护罩或模块。
1。 Arduino mega 2560 - 1件。
为了控制显示器我使用的是Arduino Mega 2560.它有很多数字端口和足够的闪存来存储程序代码。
2。 “Troyka”垫 - 3件。
“Troyka”垫用于连接“Troyka”模块而无需焊接。
3。 “Troyka”ESP 8266盾牌 - 1件。
该模块基于ESP12,用于通过WiFi连接互联网并从API中提取数据。该模块已经将电压从3.3 V逻辑转换为5V,并且与Arduino电路板兼容。
4。 “Troyka”步进护罩 - 4件。
用于操作一个双极步进电机。该模块允许您打开和关闭电机,设置旋转方向,以及调整电机速度。它可以控制步进电机电压4.5-25 V,电流高达600 mA。
5。 “Troyka”按钮盾 - 2件。
PCB上的瞬时按钮适合“Troyka”垫。我用了几个按钮来手动控制显示器。
6。用于原型制作的电线。
材料清单
1。有机玻璃背板3毫米 - 1件。
2。有机玻璃前面板3mm - 1件。
3。 PCB六角支架M3公母 - 母 - 母40mm长 - 4件。
4。 PCB尼龙六角支架M3公母 - 长8mm - 数量取决于您的电子产品类型。
5。螺钉M3(DIN7985/DIN 84/DIN 912)10毫米长度 - 7件。
6。六角螺母M3(DIN 934) - 4件以上。数量取决于您的电子产品类型。
准备
可选:
在后面的有机玻璃面板(位置1)上钻3-3.5mm的孔,以安装您拥有的电子元件。
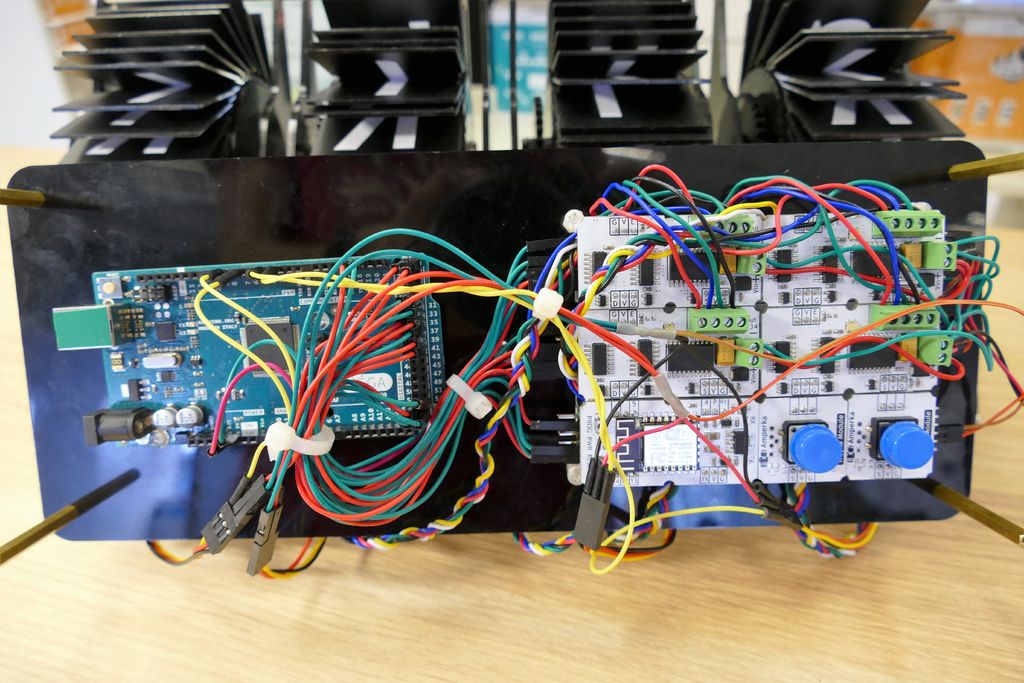
装配过程
使用螺母(位置6)或螺钉(如果有)将四个支座(位置3)拧到后面板(位置1)女性对峙。
对于电子模块,使用螺母(位置6)将尼龙支架(位置4)拧到后面板(位置1)。/li》
使用螺丝(位置5)将后面板(位置1)安装到显示器上(图6,图7)。
将Arduino板和屏蔽层安装到后面板(位置1)并用电线连接所需的引脚。
连接线路跟踪器传感器Arduino板。
将步进电机与步进驱动器模块连接。
组合屏蔽电机电源使用电线将其带到面板外面。
使用螺丝(pos)用前面板(pos.2)盖住电子元件.5)。
第12步:与Weather API的互动。
选择API
机制已完成,是时候选择天气API了。我希望显示器每半小时更新一次天气信息。
全球网上有很多服务宣布天气:AccuWeather,Forecast.io,AerisWeather,OpenWeatherMap,WeatherBug,World Weather Online等
我选择了AccuWeather API。它具有用户友好的界面和精确的文档。它可以显示整个地球和几乎任何城市的天气。但是,它不是免费的。单个API密钥的有限但免费试用是每天50个呼叫。这足以让半小时更新。
获取密钥
1。在网站上注册。检查您的电子邮箱。编辑您的个人资料并登录该网站。
2。按“我的应用程序”并创建一个新的天气应用程序。为应用命名。将API用于“其他”的位置设置,并选择C ++编程语言。
3。打开“我的应用”,然后打开您创建的应用并获取API密钥。
看起来(此密钥不真实):
UrWtYw3y5A8DaFcJfMhQmSpUsXuZw4z6B8E
将其写下来并保存在您的计算机上的某个地方。不要将此密钥提供给任何人。
查找城市ID
您应该知道您想知道天气的城市ID 。我住在莫斯科,所以我需要莫斯科城市ID。
1。转到“API参考” - 》“位置API”。
2。由于莫斯科是最大的城市之一,我选择“列表 - 》获取 - 》顶级城市名单”。
3。在“资源网址”中输入城市数量。
4。在“查询参数”中输入您的API密钥。
5。发送请求。
6。在回复中找到必要城市的ID。
“Version”: 1,
“Key”: “294021”,
“Type”: “City”,
“Rank”: 10,
“LocalizedName”: “Moscow”,
“EnglishName”: “Moscow”,
“PrimaryPostalCode”: “”,
“Region”: {
“ID”: “ASI”,
“LocalizedName”: “Asia”,
“EnglishName”: “Asia”
7。莫斯科ID是294021.记下您的ID,不要忘记。
测试API
让我们在XOD中使用之前测试API环境并了解莫斯科目前的天气。
1。转到“API参考” - 》“预测API” - 》“每小时预测1小时”。
2。在“资源URL”中输入城市ID。对于我的示例,URL看起来像:
http://dataservice.accuweather.com/forecasts/v1/hourly/1hour/294021
3。输入“查询参数”并发送请求。
4。如果你做的一切正确,你会在回复中得到这样的信息:
“DateTime”: “2018-08-03T18:00:00+03:00”,
“EpochDateTime”: 1533308400,
“WeatherIcon”: 2,
“IconPhrase”: “Mostly sunny”,
“IsDaylight”: true,
“Temperature”: {
“Value”: 27.6,
“Unit”: “C”,
“UnitType”: 17
这是我们将在XOD中使用的信息。
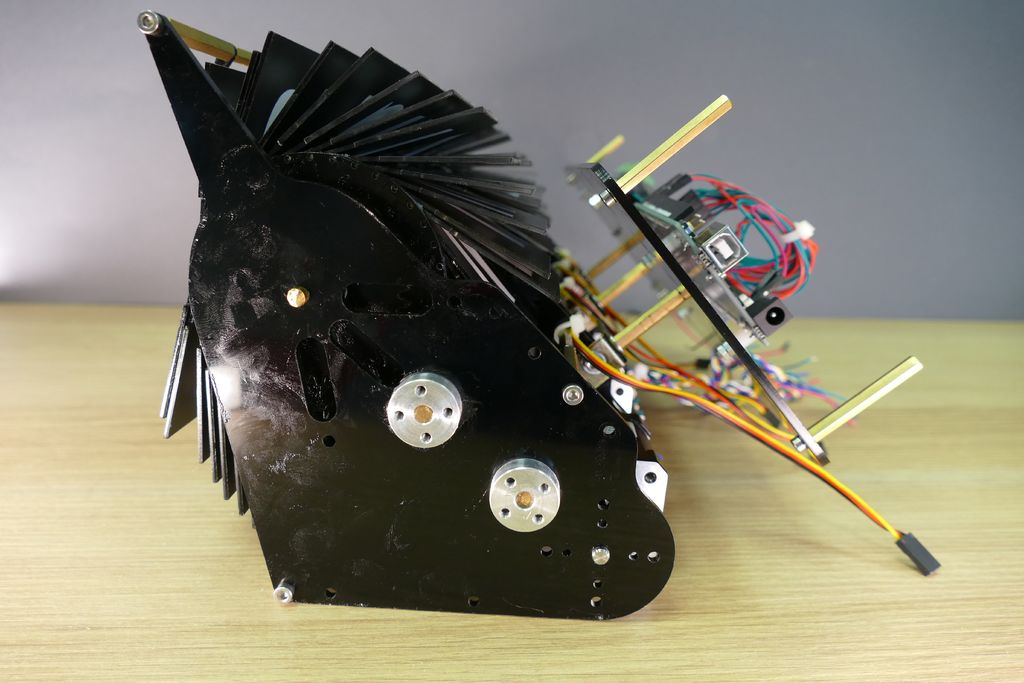
步骤13:显示操作原理。
传输率
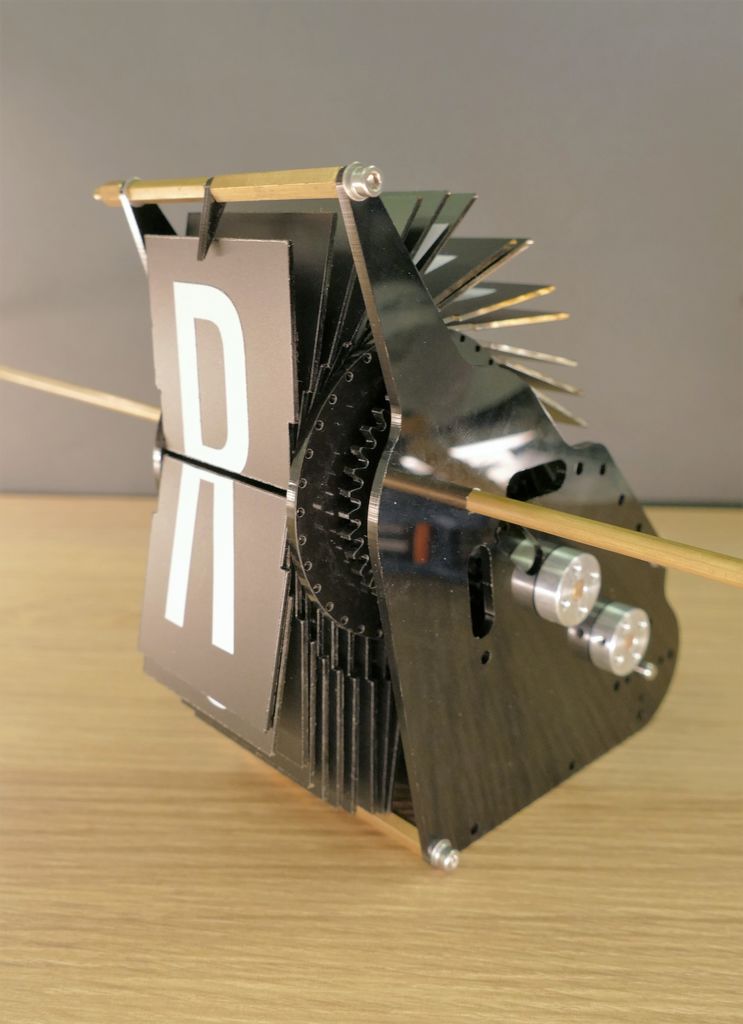
翻转支架有36个翻转,它与36个齿的大齿轮连接。两个中齿轮都有24个齿。驱动小齿轮(小齿轮)的齿数为14.通过除以齿数(36/24 * 24/14),我们得到传动比。这是1:2,571。这意味着翻转支架盘的完整转动等于驱动小齿轮的2,571圈。对于1次翻转,驱动小齿轮必须为0,0714转(2,571/36)
Nema 17步进电机的步进为1,8度。这意味着1个驱动小齿轮转动等于200个步进电机步进(360/1,8)。将乘以200乘以0.0714,我们得到将支架旋转1次翻转的步数。它是14,285。
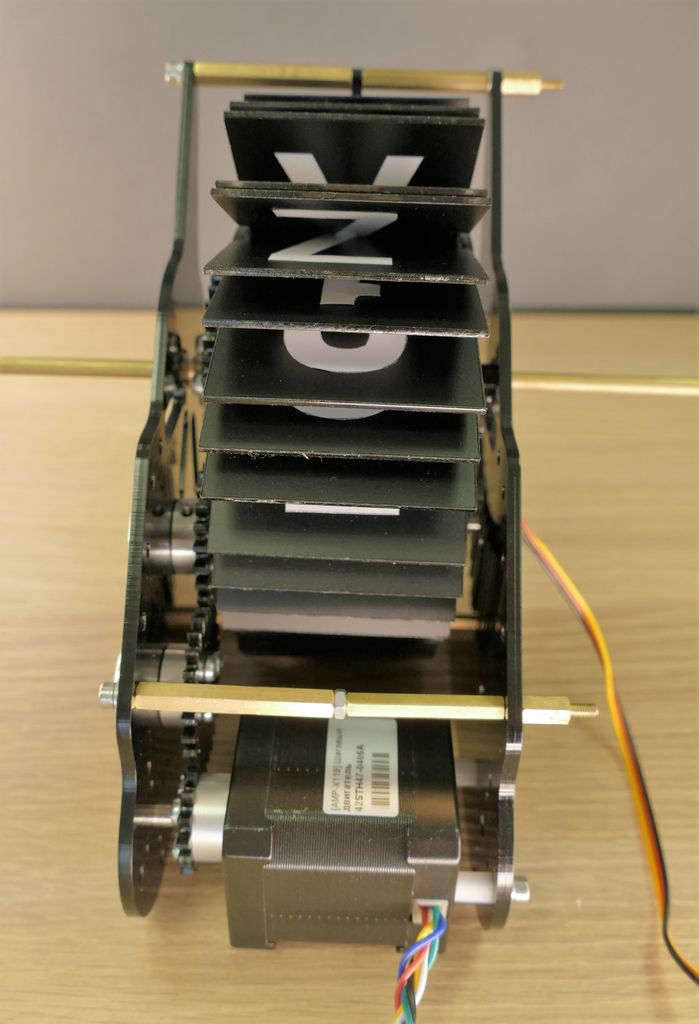
显示操作
每个数字的操作原理相同。首先,翻盖架开始旋转。它旋转直到数字线传感器检测到支架盘上的白色条带。旋转停止,翻转支架设置为默认位置。程序知道当前符号,因为我们通过将条带粘贴到磁盘的正确位置来配置它。在我的情况下,“A”字母设置为默认持有人位置。
符号已编号,我们知道它们的顺序。程序将符号数乘以14,5,并为特定符号的电机提供所需的步数。
例如,默认字符“A”的编号为0,字符“F”的编号为5.要切换到符号“F”,电机会执行(14,285 * 5)71步。步数舍入为最接近的整数。
步骤14:制作XOD程序。索引节点。
我决定使用XOD环境对显示进行编程。 XOD非常适合快速原型制作。
如果您以前从未使用过XOD,我强烈建议您在编程设备之前阅读一些教程和练习。
我发布了图书馆“gabbapeople/iot-split-flap-display“包含显示控件所需的节点和补丁。您可以在XOD网站上找到库描述。
某些节点是从已经存在的节点创建的,而有些节点是从头开始编写的。在XOD中,自定义节点是用C ++编写的。接下来,我不会描述C ++代码,而只是解释显示操作的基本原理并简要说明节点。
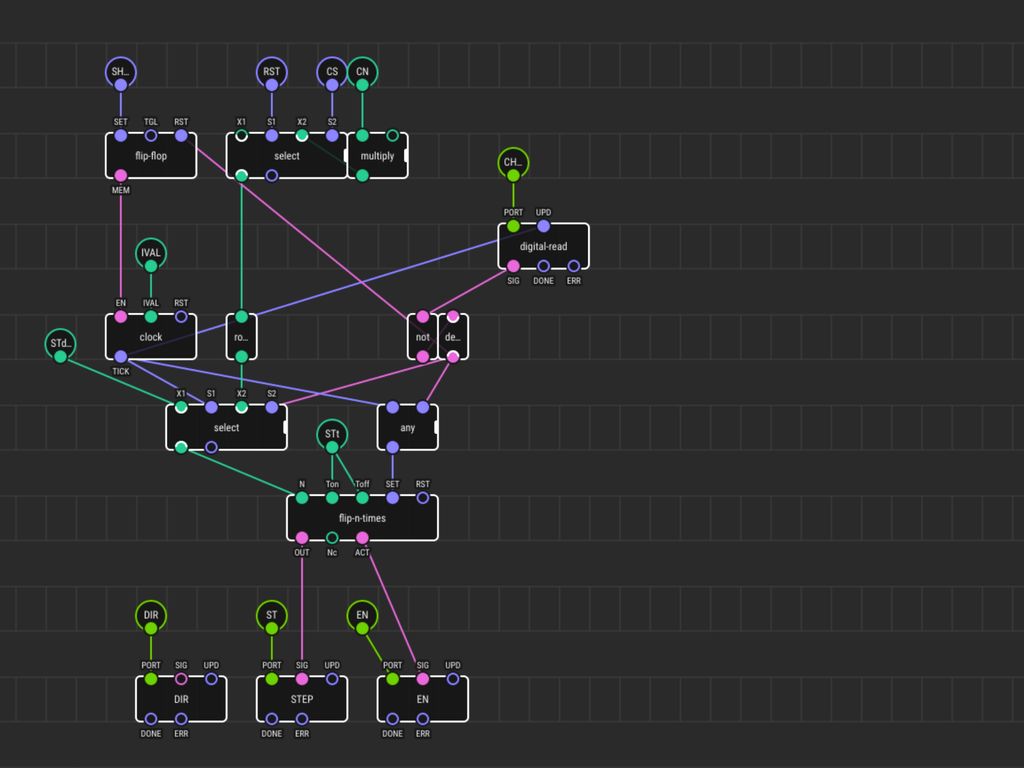
索引节点
此节点负责控制步进驱动器模块并检测默认的翻转支架位置。它内部没有自定义节点,完全由核心节点组成。
我使用的“Troyka”步进驱动模块有3个输入引脚。 “DIR”设置方向,“STEP”负责步骤,“EN”打开或关闭电机。
要迈出一步,需要更改逻辑0 “STEP”端口为1.这些更改的数量负责步骤数。在XOD中有一个合适的节点“翻转n次”,可以轻松地进行这些更改。
只有当数据序列发送到“STEP”时,电机才会在“EN”处打开。销。这样做是为了消耗更少的能量并使步进电机可靠。
“数字读取”和“延迟”节点用于发信号通知翻盖上的白色条纹。使用“not”节点,您可以切换线传感器的逻辑信号。在我的例子中,如果表面的颜色是黑色,数字线传感器输出“True”,如果颜色是白色,则输出“False”。
输入引脚:
SHOW (脉冲) - 触发新角色演出的脉冲输入。
RST (脉冲) - 用于重置数字的脉冲。它在找到默认位置为0后设置电机步数。
CS (脉冲) - 用于设置特定字符的电机步数。
CN (数字) - 要显示的字符数。它被乘以14,285来设置电机步数。
STdef (数字) - 设置翻转架旋转速度的步骤在白条试图期间。默认设置为15.
STt (数字) - 将“0”和“1”值发送到“STEP”之间的延迟步进驱动模块的引脚。默认值为0.003秒。
IVAL (数字) - 指定向步进驱动程序模块发送“0”和“1”值的频率。
DIR (端口) - 控制器板上的一些端口,步进驱动器模块的“DIR”引脚
已连接。
ST (端口) - 控制器板上的一些端口,其“STEP”引脚步进驱动器模块已连接。
EN (端口) - 控制器板上的一些端口,其“EN”引脚步进驱动器模块已连接。
CHCK (端口) - 数字线路传感器所连接的控制器板上的多个端口。
第15步:制作XOD程序。获取天气节点。
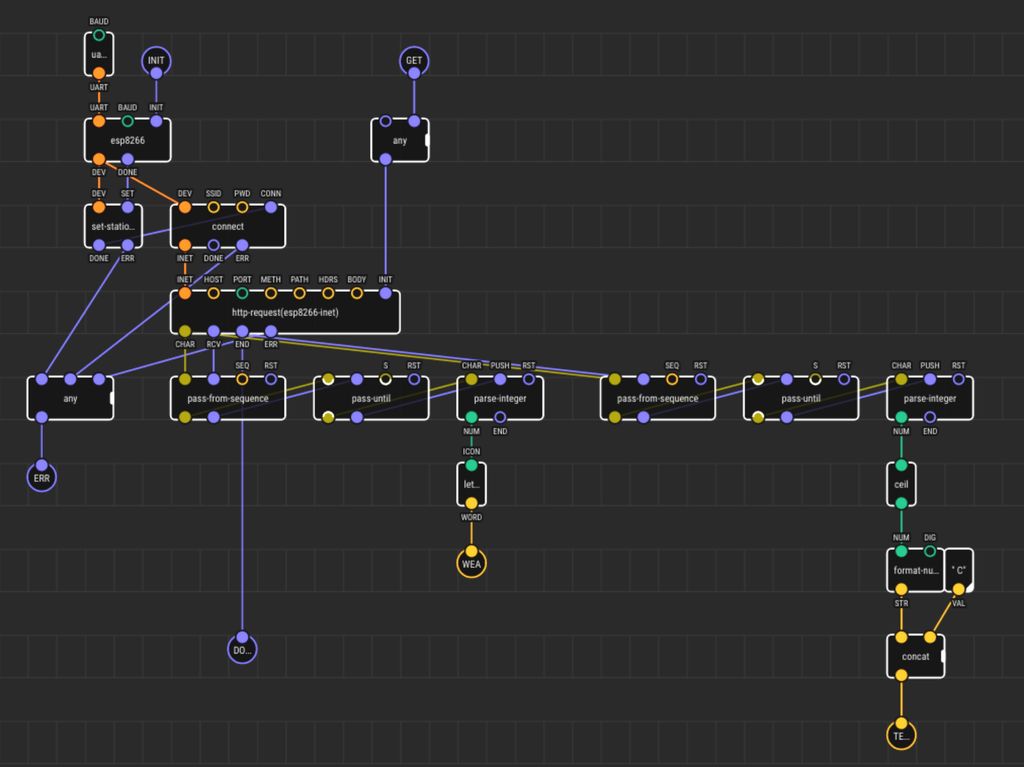
获取天气节点
此节点(图2)是负责连接到Web,与API交互,获取响应和解析数据。
“uart-1” - 建立UART的节点控制器与ESP 8266 AT-modem模块之间的连接。 “uart-1”表示控制器和调制解调器使用第一个HARDWARE序列交换数据。
“esp8266” - 该节点负责初始化和配置AT-modem模块。
“set-station-mode” - 在站点模式下设置ESP8266的节点。
“connect” - 通过Wi-Fi建立互联网连接的节点。您应该配置它,输入您要连接的网络的名称和密码。
“http-request(esp8266-inet)” - 用于执行HTTP请求并返回响应的节点。使用参数配置它:
HOST - 对于AccuWeather API,地址为“dataservice.accuweather.com”。
PORT - 服务器正在侦听“80”端口号。
METH - HTTP方法。对于获取API数据,它是“GET”。
PATH - 所请求资源的路径。您可以在AccuWeather API网站上查找路径,也可以将此路径与您自己的API密钥和CityID一起使用。
/forecasts/v1/hourly/1hour/294021?apikey=UrWtYw3y5A8DaFcJfMhQmSpUsXuZw4z6B8E%20&metric=true
接下来的两个节点顺序“pass-from-sequence”,“pass-untill”和“parse-integer”用于解析来自服务器的响应。
解析天气状况
解析天气状况编号的服务器响应的第一个顺序。它被称为“WeatherIcon”。 AccuWeather API可以对40种变体中的一种进行天气描述编码。我们开始在服务器响应中搜索序列“WeatherIcon”:
并解析数据,直到“,”符号为整数值。带有天气描述和相应值的表格在附件中。
解析温度
第二个解析序列适用于当前温度。我们开始在服务器响应中搜索序列
“Value”:
并解析数据,直到“,”符号为整数值。将输出整数值转换为两位数。使用“ceil”节点将其舍入为最小整数,并使用“format-number”节点删除额外的零。
为了更加清晰,我使用“concat”节点添加间距和“C”字符到温度值并以字符串形式输出结果。
字母图标到字节点
此自定义节点采用天气数字并以字符串形式输出四字符缩写。
步骤16:制作XOD程序。最终。
剩余的自定义节点说明
“字母字对字节”节点。此节点以字符串格式输入四个字母的单词,并以字节格式输出四个字符。每个字符都被发送到其索引。
“letter-zero-to-o”节点。此节点将输入“0”字符更改为字母“O”。
“letter-to-step-1”,“letter-to-step-2”, “letter-to-step-3”,“letter-to-step-4”节点。这四个节点用于确定“索引”的字符数。每个索引都有自己的“字母到步”节点。这样做是为了消除数字错误,例如翻转跳过或过度旋转。
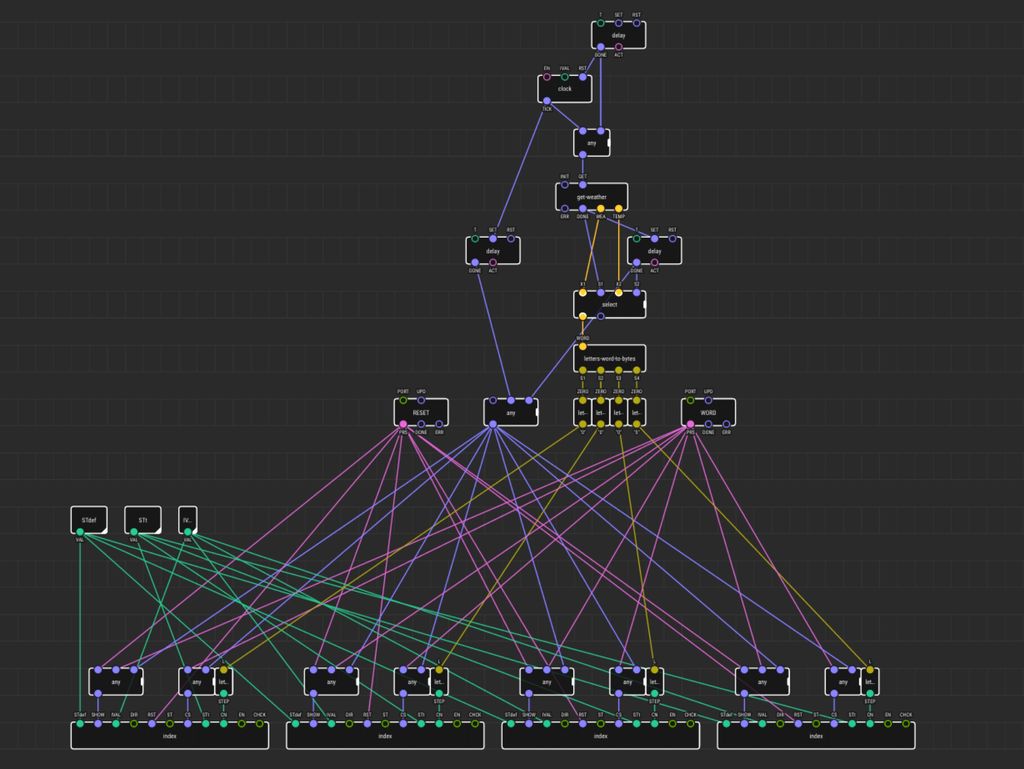
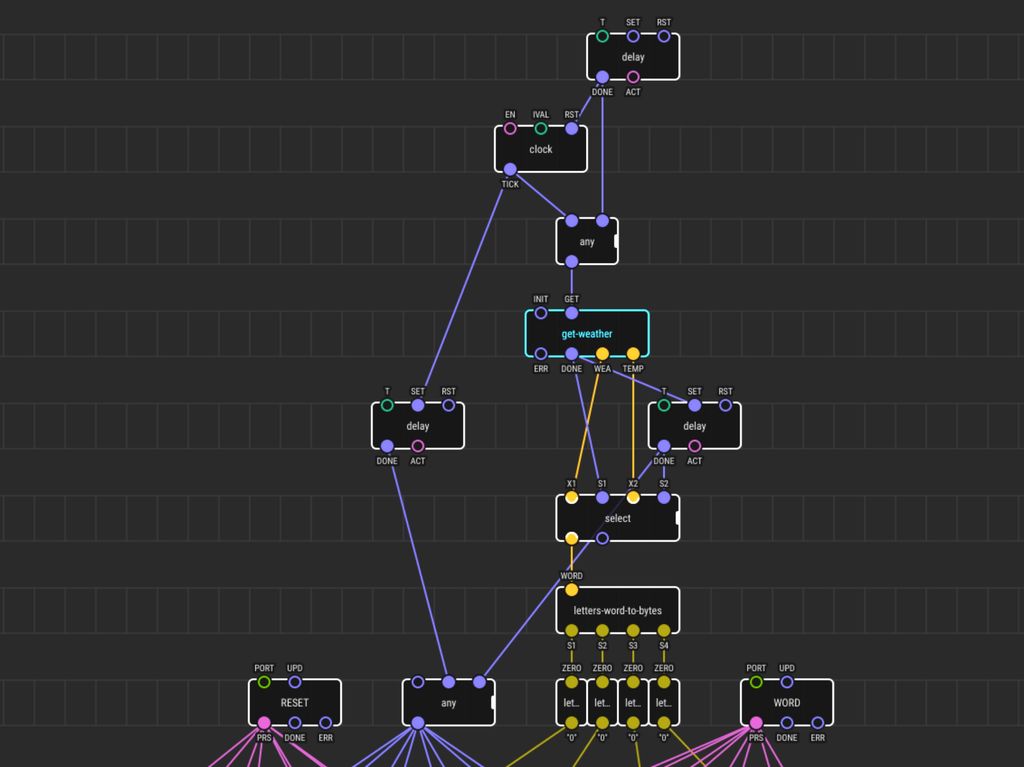
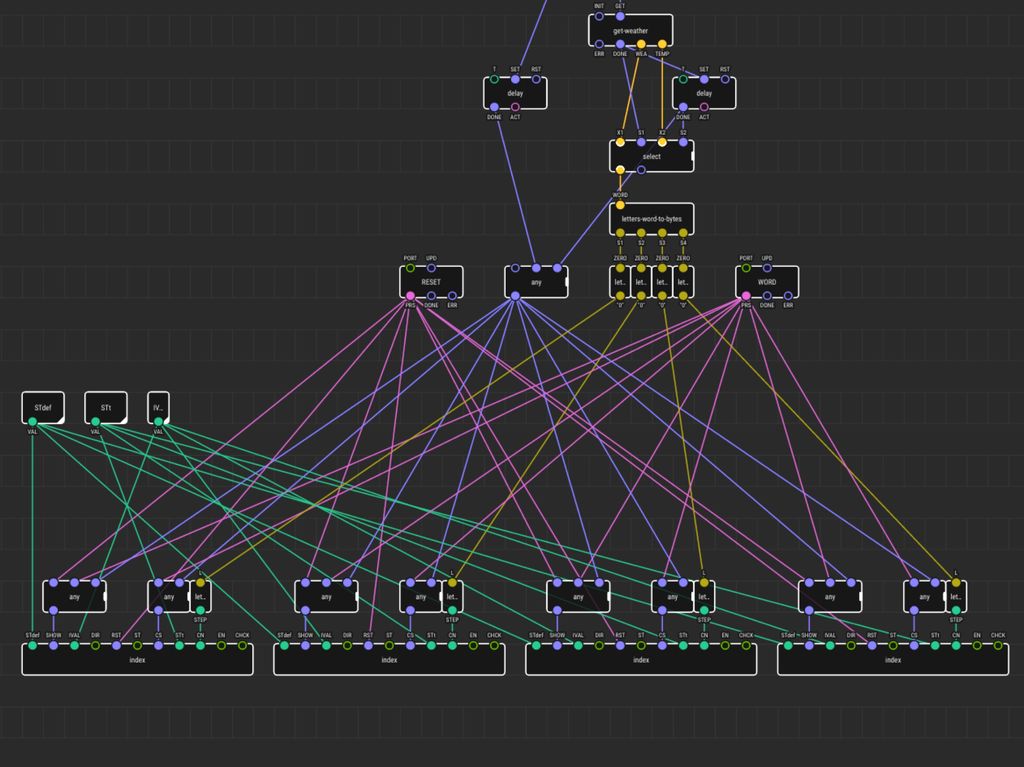
最终补丁
最终的XOD补丁在图片。它包括:
四个“索引”节点。每个显示数字都有自己的“索引”节点,除了“STt”,“IVAL”和“STdef”常量外,还有自己的参数。
“get-weather”节点。/li》
“get-weather”节点之前的“clock”和“delay”节点。它们每半小时在启动时产生一个脉冲。
“get-weather”和“letters-word-to-bytes”之间的“延迟”和“选择”节点“节点。这样做是为了首先显示天气状况和之后的温度。
“字母字对字节”节点。
四个“字母从零到节点”。
四个“字母到步骤”节点。
RESET“按钮”节点。我使用我的第一个按钮将数字重置为默认位置。
WORD“按钮”节点。我用来重置最后显示的单词的第二个按钮。
-
显示器
+关注
关注
21文章
4956浏览量
139850
发布评论请先 登录
相关推荐
显示器HDR认证

显示器低蓝光(ChinaMark)认证

苹果计划推出壁挂式智能显示器
工业级触摸显示器的分类与应用分享
嵌入式工业显示器在食品生产行业的应用
VR显示器的优缺点
如何选择工业液晶显示器和消费类显示器?
工业显示器和普通显示器的区别有哪些?
显示器:连接虚拟与现实的视觉之窗
Q-Pixel研发全球像素密度最高的主动式矩阵Micro LED全彩显示器

等离子显示器特点 等离子显示器的工作原理





 工商网监
工商网监
评论