 Arduino船型机器人的制作
Arduino船型机器人的制作
步骤1:零件
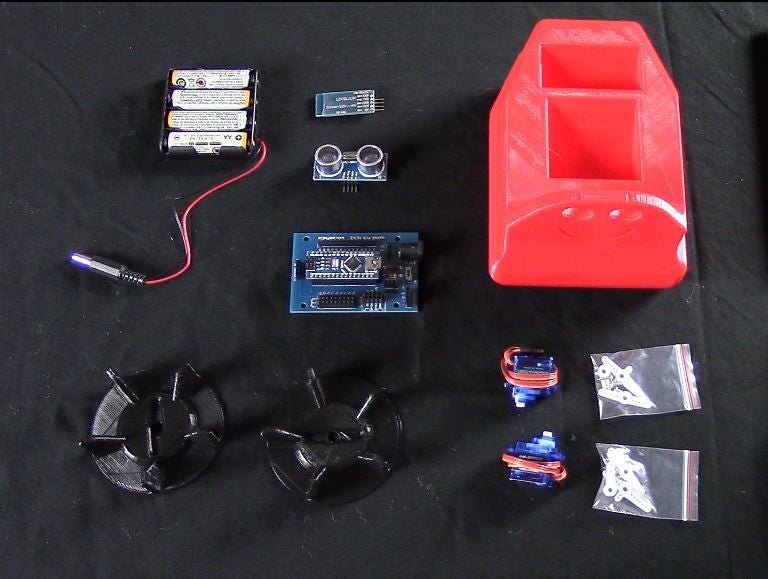
主要LittleBots Arduino Board
连续旋转伺服系统
Arduino Nano
4x电池组
蓝牙模块
超声波传感器和4x跨接线
3D打印部件
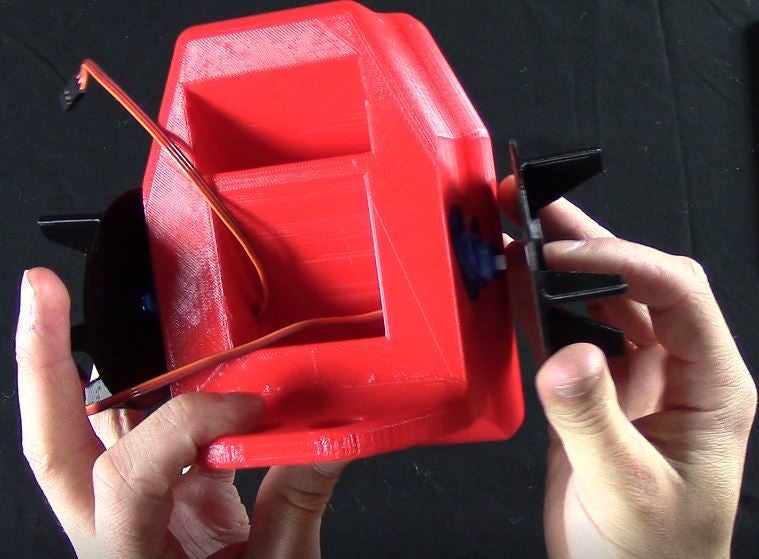
步骤2:插入舵机

将伺服插入每侧的插槽中
确保衔铁伺服电机在插槽中向下和向前移动,导线进入主体的电子部件隔间。
步骤3:连接桨轮


将两个叉形伺服喇叭插入桨轮的插槽中。
将车轮和喇叭按到每个伺服电机的电枢上,并用伺服喇叭螺丝固定。
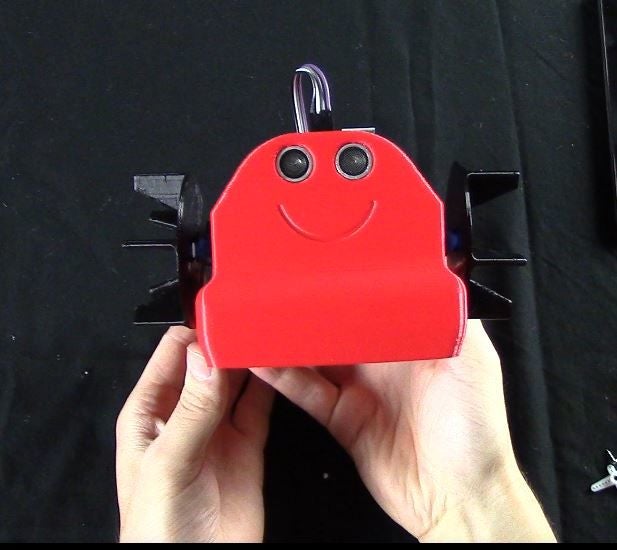
步骤4:插入超声波传感器



按超声波传感器进入主体的眼孔。
确保传感器的引线或指向上方。
您也可以弯曲引线,使它们指向正后方。
步骤5:插入电池组

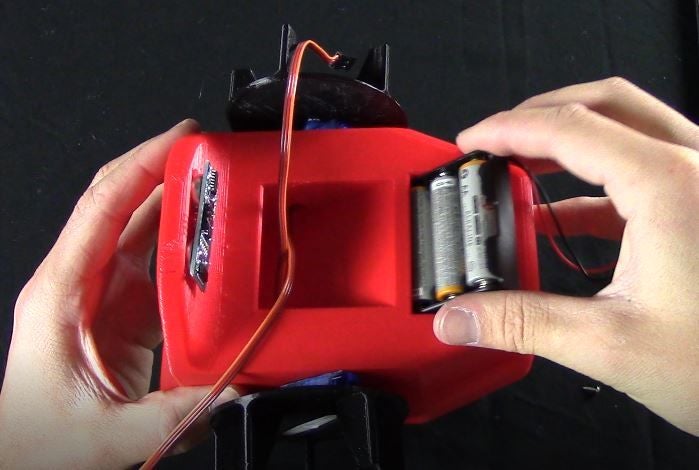
使用AA电池装入电池
将电池组滑入Waterbot背面的插槽中
步骤6:将代码上传到Arduino。

从LittleBots网站的下载页面获取最新的Walter_OS或Waterbot Arduino Sketch。/li》
使用Arduino IDE,将草图上传到arduino Nano。
在连接蓝牙模块之前,请务必上传代码。蓝牙和USB将相互干扰并产生错误的串行连接。
步骤7:准备主板
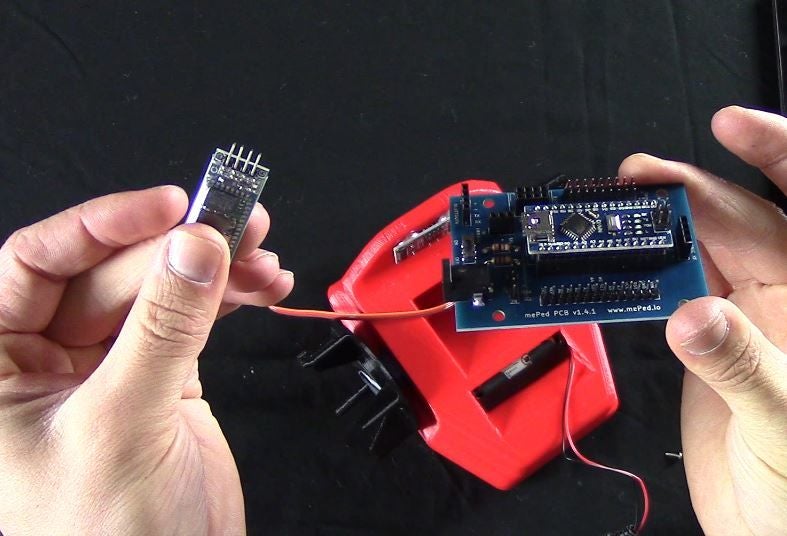



将Arduino Nano插入主板,使USB端口指向主电源开关
将蓝牙模块插入蓝牙端口,如图所示。标签也印在电路板上供参考。
步骤8:插入主板


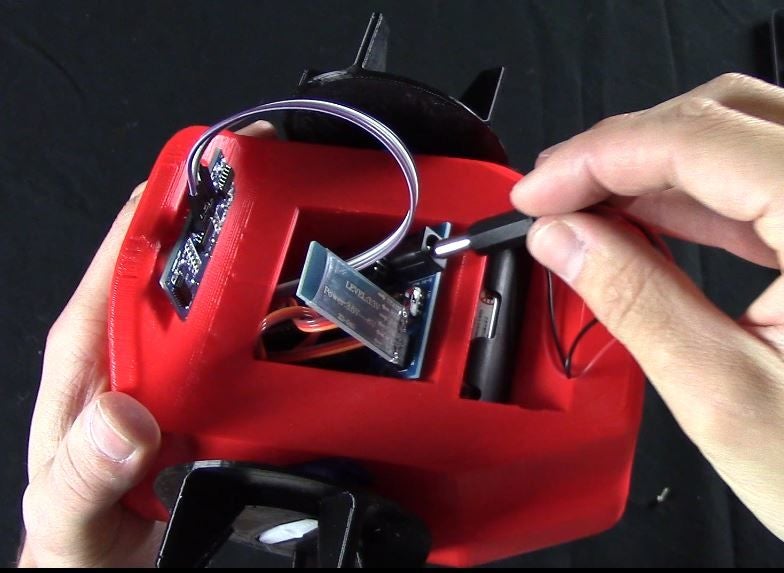
将超声波传感器连接到主板
将左右伺服引线连接到主板
将电路板滑入Waterbot上的前方电子设备隔间,使蓝牙模块从背面向外突出。
步骤9:享受
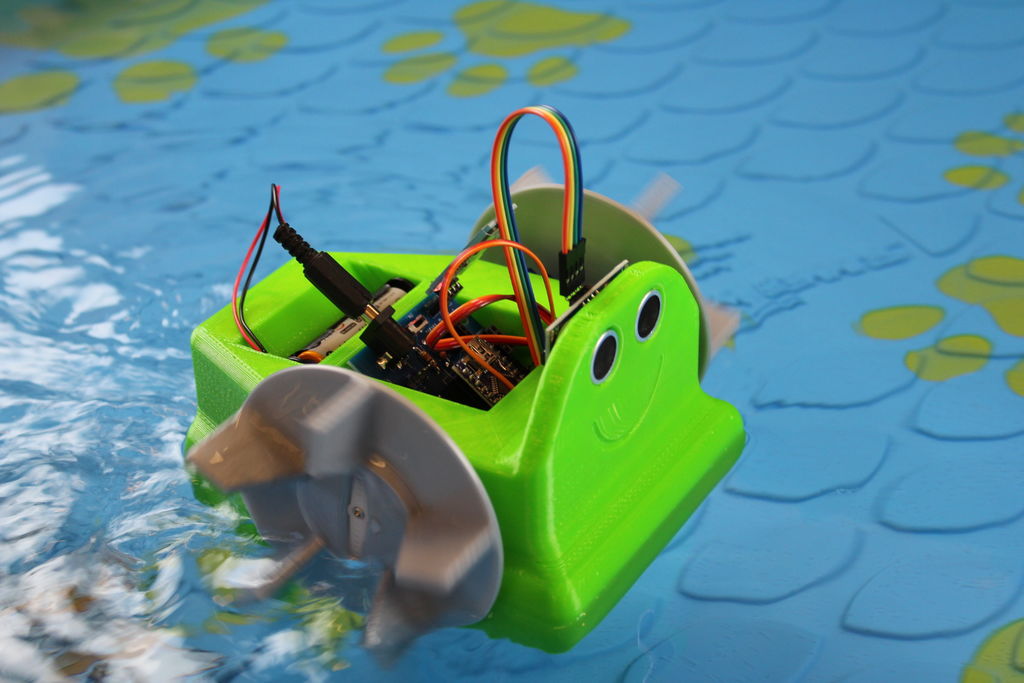


按照说明中的说明下载Littlebot应用程序并连接蓝牙视频
开始享受。甚至可以编辑代码以添加新功能。
-
机器人
+关注
关注
211文章
28467浏览量
207345 -
Arduino
+关注
关注
188文章
6471浏览量
187236
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
开源项目!OpenCat—— 一个全能的平价四足机器人
【开源项目】你准备好DIY一款功能强大的机器人了吗?
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系






 工商网监
工商网监
评论