 如何制作一个机器人车
如何制作一个机器人车
步骤1:物料清单






您将需要以下物品:
任何材料的薄扁平物品如下任何一项:
木板条
亚克力相框
手机壳(可在Dollar Tree *购买)
黑板
刨花板(Michaels提供*)
这可能需要一些冰棒支撑
角匾
门吊
仙女门(可在Dollar Tree *购买)
底板(兼容乐高)(可在Dollar Tree *购买)
牌匾(可在Michaels *)
木质激光切割牌匾
木板
您可能有的任何其他薄款产品
《升i》 STEAMbot裸骨套件,该套件包含以下内容:
STEAMbot控制器 - 带BLE和双电机控制器的Arduino兼容板
控制器支架 - 用于保存STEAMbot控制器
2直流电机和车轮
滚轮
带电缆的超声波传感器
超声波传感器支架
4 AA电池座
泡沫安装胶带
热胶枪和胶水(低温首选)
小扁平螺丝刀
以下项目是可选的:
诸如此类的装饰以个性化您的机器人
支持蓝牙LE的移动设备
使用Blockly进行编程时,请执行下列任一操作**:
Chromebook(支持BLE)或
运行Chrome浏览器的Mac电脑
使用Arduino IDE进行编程
微型USB电缆
任何支持Arduino IDE和STM32插件的计算机。
*我在指定的商店购买了该商品,但我在他们的网站上找不到该商品。
**目前,运行Chrome的Windows无效。我没有尝试任何Linux计算机。
第2步:连接电机



此Instructable将使用木板条,但适用于材料清单中列出的任何薄扁平物品。
要安装电机,请执行以下操作:
将木板放在桌子上。
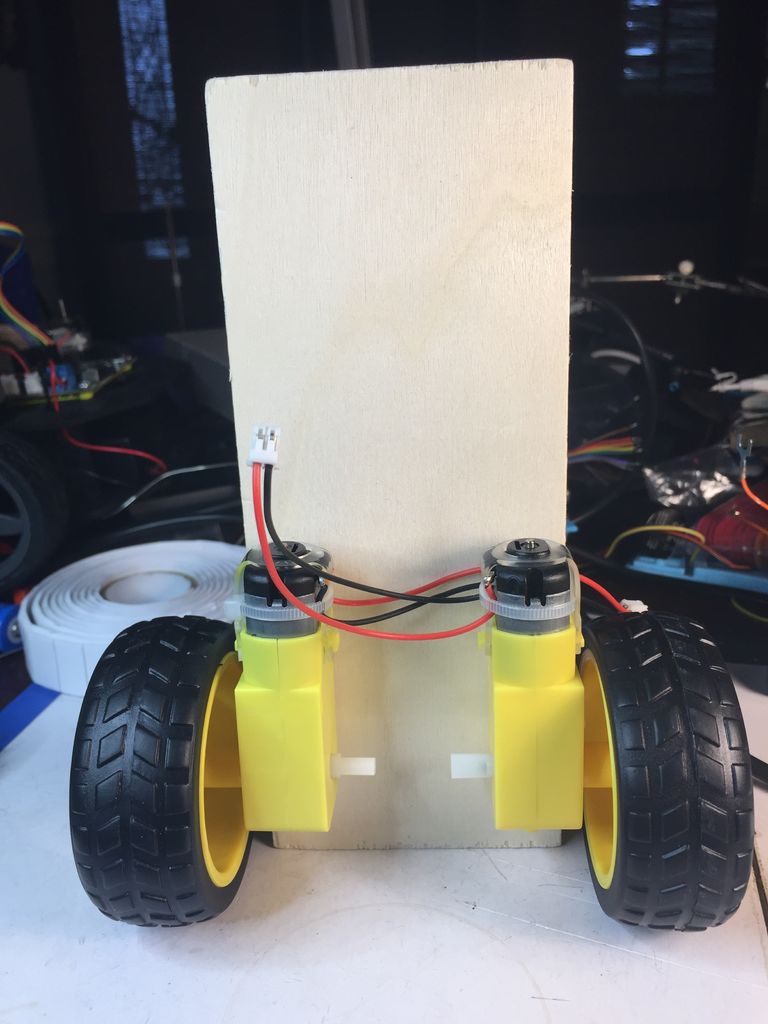
从右侧电机的泡沫安装胶带上取下保护纸(虽然它出现在照片的左侧,尽管它实际上是正确的电机)。确保电线朝向扁平物品的中间。
将右侧电机与扁平物品对齐,然后将电机泡沫胶带压在扁平物品上。
对左侧电机重复步骤2和3。您的机器人应该与上一张照片类似。
步骤3:连接电池座

要安装电池座,请执行以下操作:
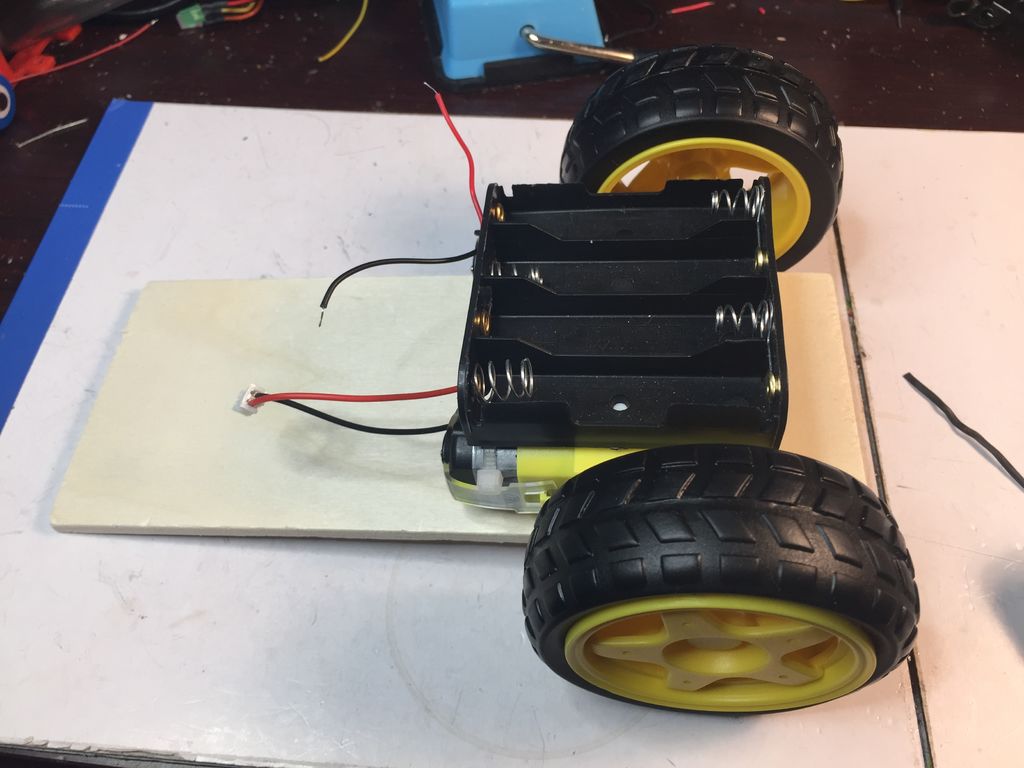
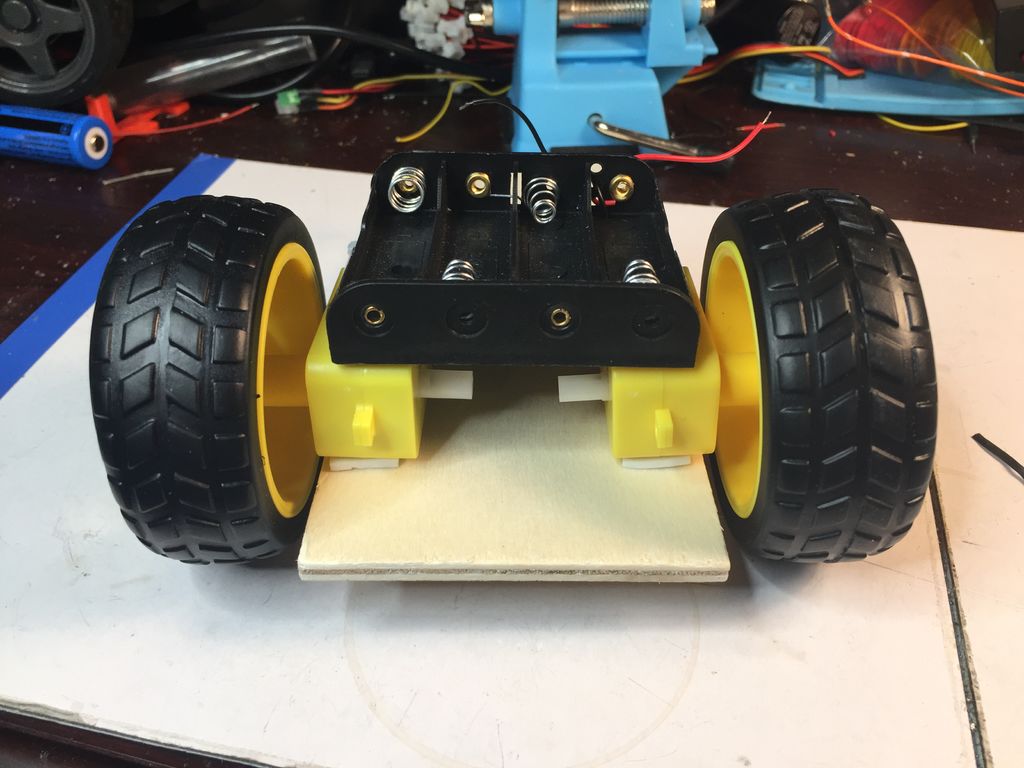
从电池座的泡沫安装胶带上取下保护纸。
小心地将电池座对准电机并将电池座压在电机上。
注意,根据扁平物品的宽度,电池座可以放在适合的位置在电机的轴之间。如果电池座安装在电机之间而不是轴之间,则切割一块适当大小的纸板或巨型工艺棒以支撑电池座并将其热粘到电机上。然后将电池座安装在纸板上。
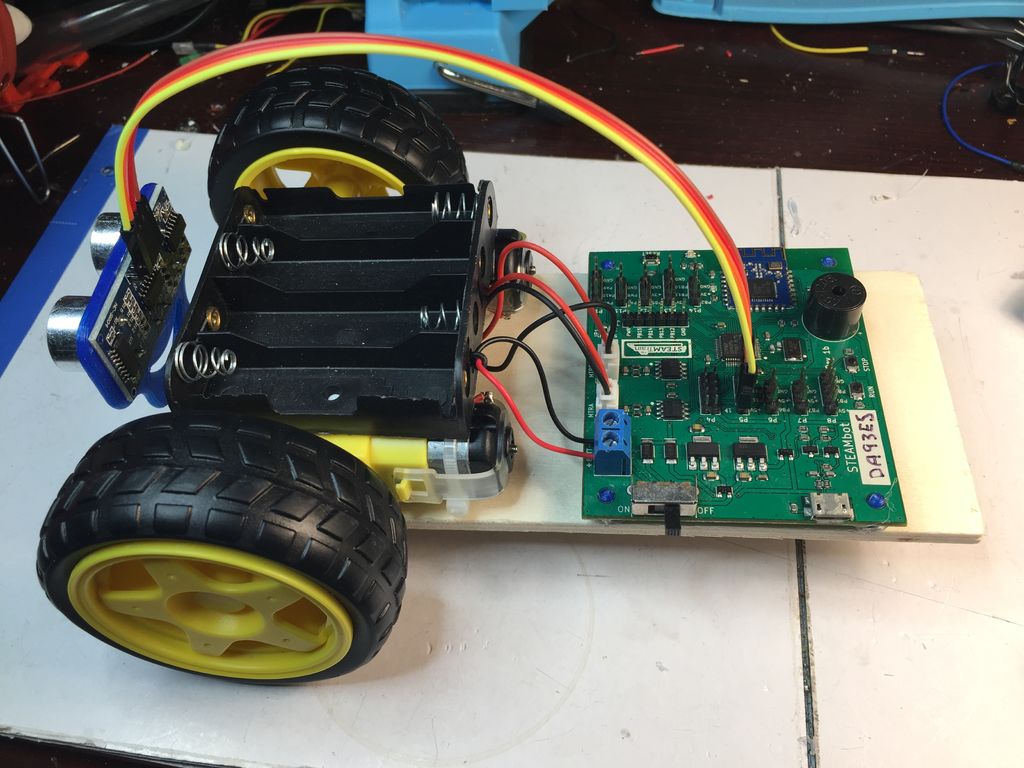
步骤4:连接STEAMbot控制器
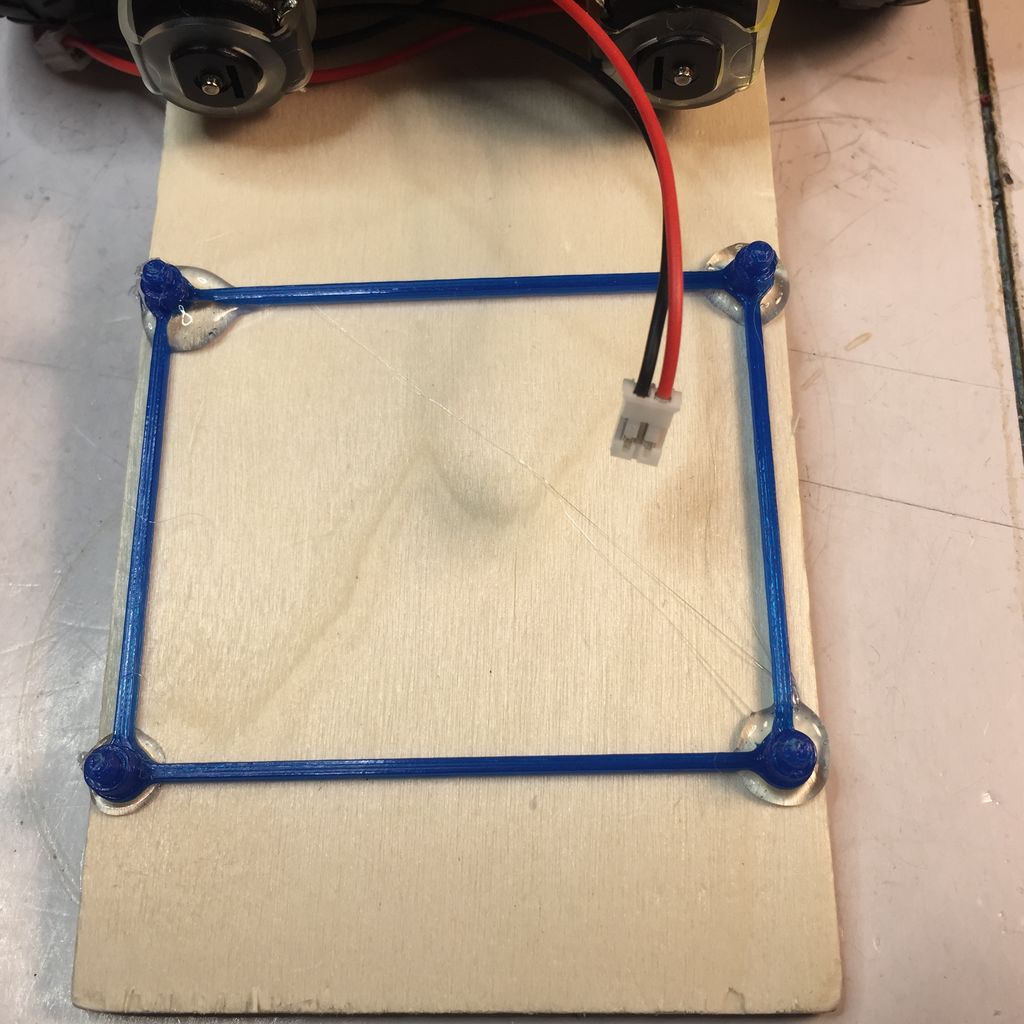

要连接STEAMbot控制器,请执行以下操作:
使用热胶枪,将控制器支架粘贴到扁平物品的顶部。如果使用高温胶水,则使用PLA进行三维打印,因此要非常小心。
将STEAMbot控制器放在支架上。电源开关应位于左侧。
使用小型平头螺丝刀,将电池座上的红线连接到+端子螺钉。
安装黑色电线。电池座 - 端子螺钉。
将电机从左电机推入标有MTRA的左侧连接器。
将电机从右电机推入右侧连接器,标记为MTRB 。
步骤5:连接滚轮


附加滚轮,请执行以下操作:
将机器人车翻转并在机器人后部放置一个支撑,以保持平坦物品的水平。
将滚轮放置在机器人汽车后部附近并居中。
将滚轮热胶粘到机器人汽车的底部。
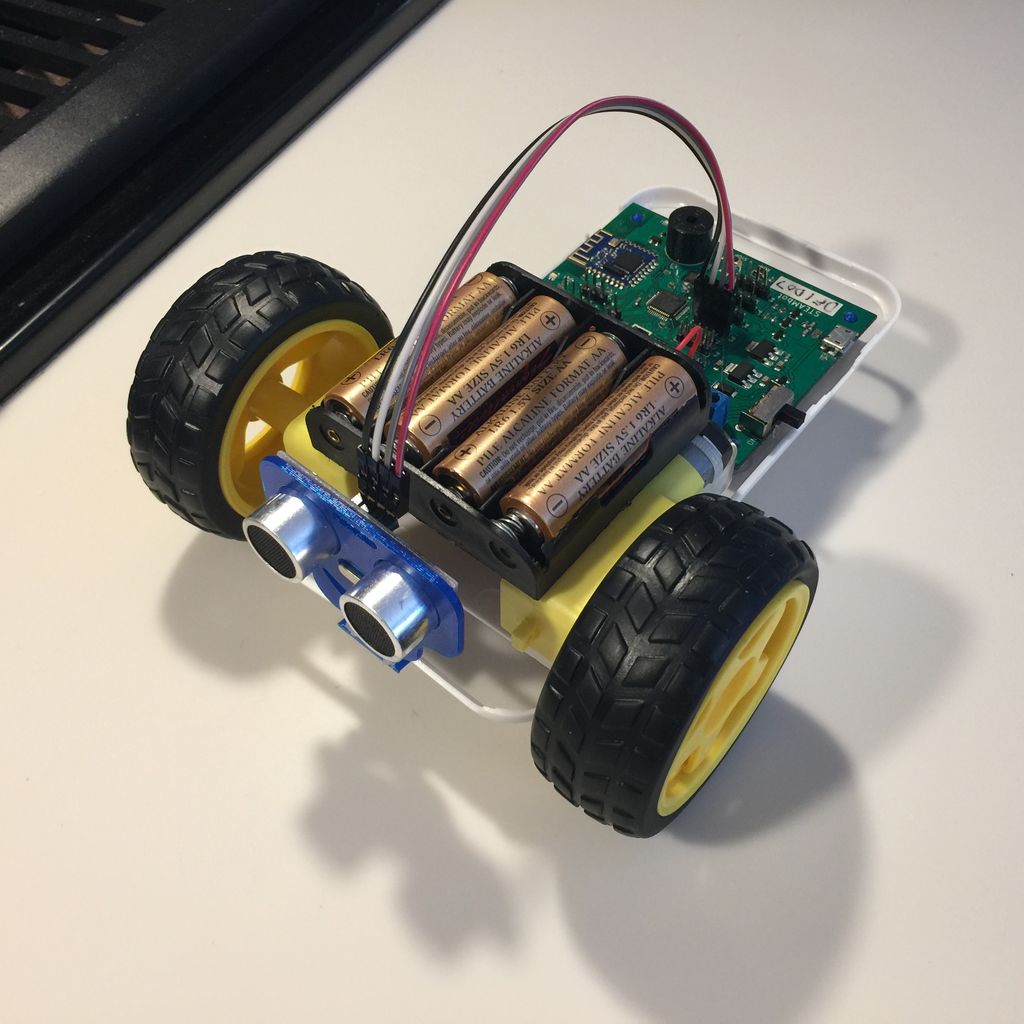
步骤6:安装超声波传感器
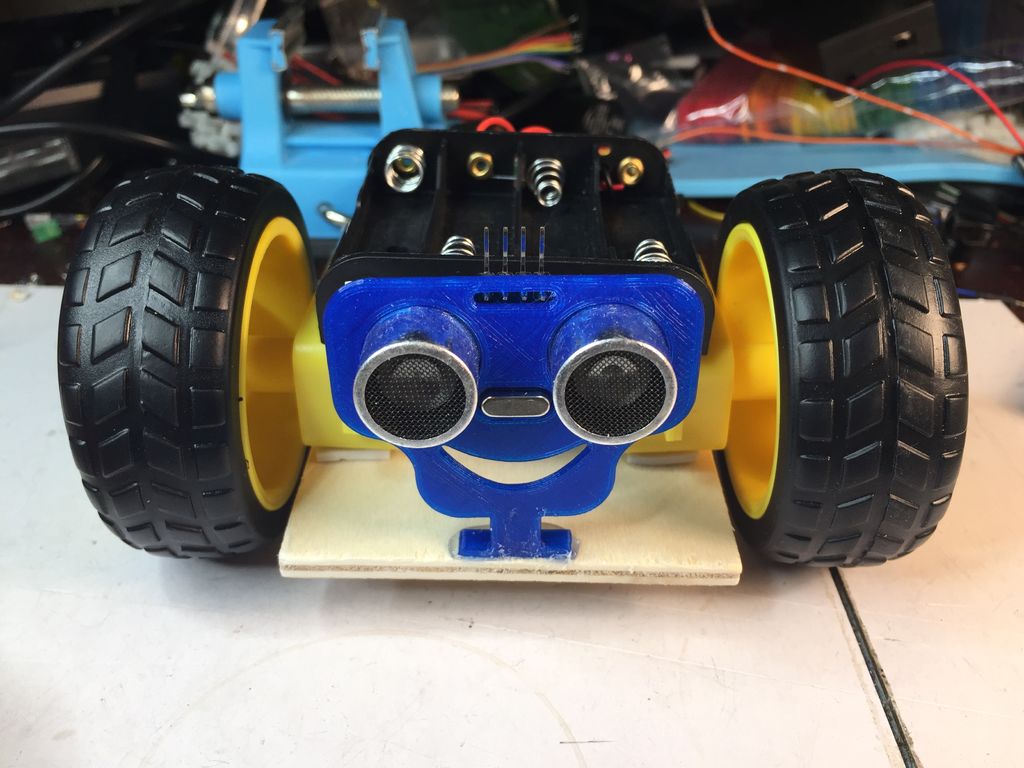
要安装超声波传感器,请执行以下操作:
如果支架中尚未安装超声波传感器,请小心地将超声波传感器推到支架。
将带有超声波传感器的支架热粘到机器人车前部。
将4芯导线连接到超声波传感器上,注意不要弯曲插针。
将4芯导线的另一端连接到STEAMbot控制器上的P5连接器,同时注意不要弯曲插针或穿过导线。
步骤7:装饰你的机器人车(可选)



如果你想有创意,装饰你我们的机器人车。以下是一些建议:
如图所示,使用管道清洁器,绒球和其他东西来装饰您的机器人汽车。
使用纸张和纸张创建封面Cricut(或类似)机器。
购买新的或二手的玩具并使其适合您的机器人汽车。
步骤8:为机器人供电汽车
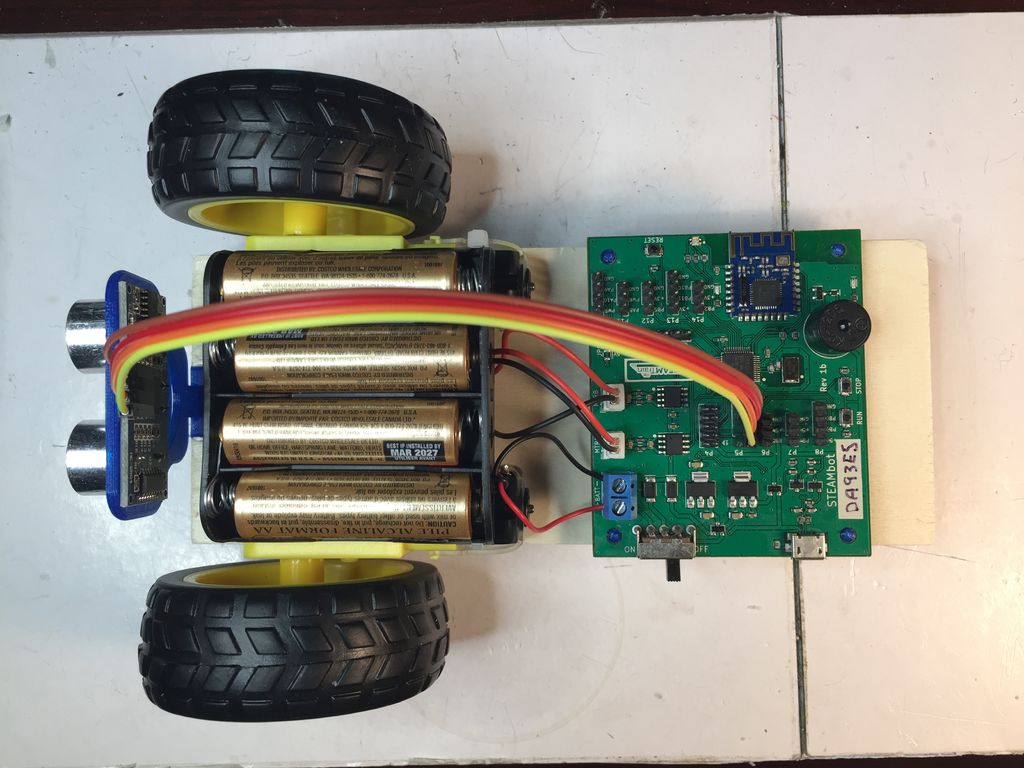
要为您的机器人汽车供电,请执行以下操作:
确保电源开关处于关闭位置(朝向机器人后部)。
装入4节AA碱性电池。 NiCd或NiMH电池不能正常工作,因为电压太低。
将电源开关推到“打开”位置(朝向机器人汽车的前部)。
电源LED应亮红灯,RGB LED将闪烁并改变颜色。在一两秒内,你应该听到一声哔哔声。
此时,您的机器人汽车已准备好通过移动应用程序进行控制或进行编程。
步骤9:远程控制模式
机器人汽车的默认模式(首次启动时)是远程控制模式。要远程控制机器人汽车,请在Bluetooth LE兼容设备上安装 My STEAMbot 移动应用程序。对于iOS设备,请在此处获取应用。对于Android设备,请在此处获取应用程序。
步骤10:猫模式
第二个内置模式是 Cat模式 。虽然视频是STEAMbot机器人,但您的机器人汽车将以相同的方式运行。要将机器人车辆置于 Cat模式,请执行以下操作:
将机器人车放在地板上。
同时按下RUN和STOP按钮(它们位于STEAMbot控制器的后部)。
听到两声嘟嘟声并且RGB LED开始闪烁后,将手或其他物体放在机器人车前。在一定距离(约20厘米)处,您的机器人车将向前移动。但是如果你把你的手(或其他物体)放在离你的机器人车太近的地方,那么它就会退回。
要回到默认的遥控模式,推动两者同时运行和停止按钮。
步骤11:使用Blockly编程机器人汽车(可选)
要使用Blockly对机器人汽车进行编程,请将Chrome浏览器(从Chromebook或Mac计算机)指向STEAMbot Programmer页面。您的机器人车必须处于远程控制模式。
步骤12:使用Arduino IDE编程机器人车(可选)
您可以使用C ++语言和免费的Arduino IDE对机器人汽车进行编程。要使用Arduino IDE对机器人汽车进行编程,请从此处下载STEAMbot用户指南(任一版本均可使用),并按照指南中的软件安装说明进行操作。
-
机器人
+关注
关注
211文章
28414浏览量
207037
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论