 Arduino机械手臂的制作
Arduino机械手臂的制作
第1步:电子产品
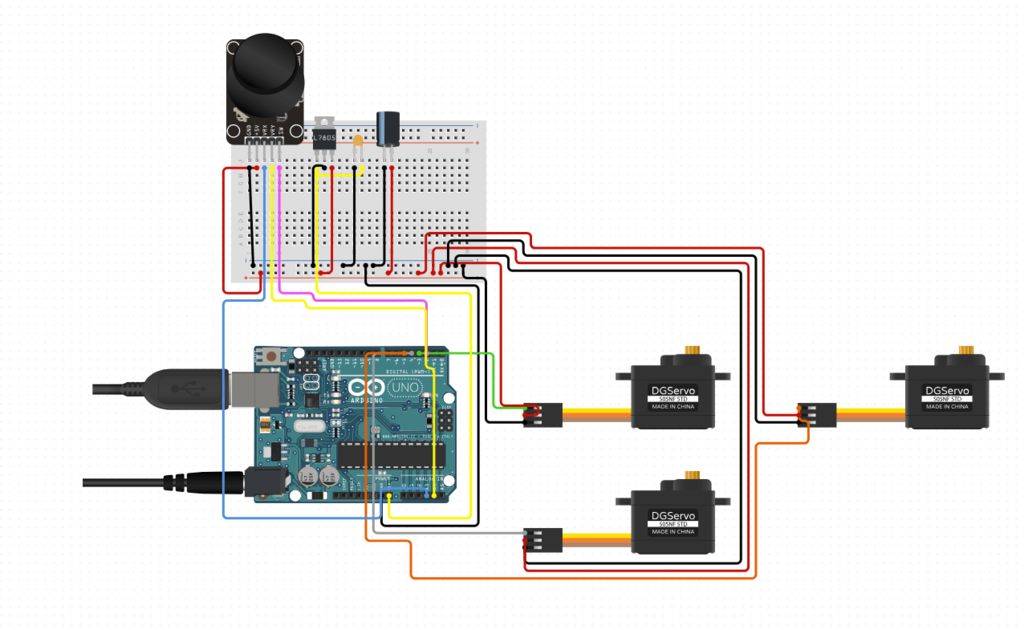
主要组件
Arduino UNO3
SparkFun舵机(通用金属齿轮)
PS2操纵杆2轴模块
次要组件
电压调节器5v
电解电容器 - 1uF/50V
电容器陶瓷100nF
HeatSink TO-220
BreadBoard - 半尺寸
跳线包 - M/M
参见接线图,或点击此处
步骤2:代码
首先,您需要从circuito.io上的代码选项卡下载电路代码。
按照步骤检查您是否正确连接
使用此Github存储库中的firmware.ino代码替换circuito.io中的firmware.ino测试代码。保持其他库不变。
确保保留“包含库”和“引脚定义”。检查引脚定义是否匹配。
第3步:材料

我们在车间使用了1厘米厚的木屑。在某些地方,我们将两块胶合在一起,以增加强度和坚固性。您可以检查周围的其他材料,但要确保它坚固而又灵活。
为了将零件捆绑在一起,我们制作了热量 - 塑料瓶缩小了。这是一种很棒的技术,你可以用家里装的塑料瓶来制作。玩一下,稍微测试一下,你会惊讶它们有多强。
手臂移动在3轴,因此我们将使用3个伺服电机。
第4步:基地
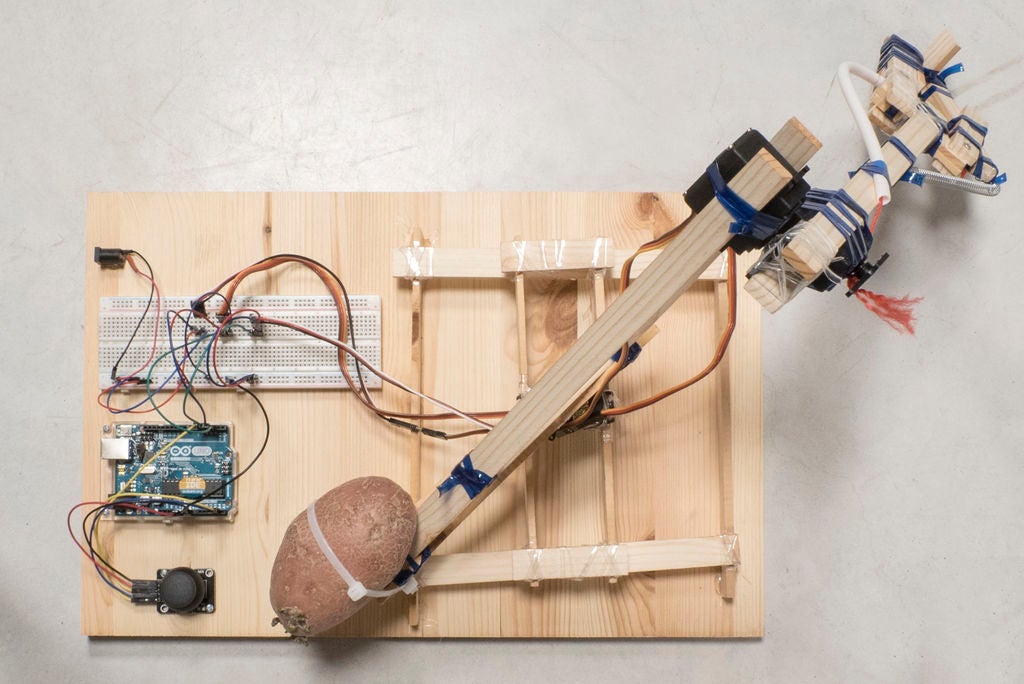
用坚实的底座开始构建,这样手臂就不会翻倒。同时我们还需要了解什么是最好的绑定方式并将木块系在一起,使基座坚固。在下图中,您可以看到我们使用热缩的方式和马铃薯(!)作为重量的基础。只是不要忘记不时更换它:)
步骤5:平衡
放置第二伺服更棘手,我们觉得这个领域仍然需要一些关注。在构建原型之后,我们意识到我们没有充分考虑平衡上臂。因此,伺服电机会消耗大量电流 - 这可以通过在臂的另一侧使用配重来克服。
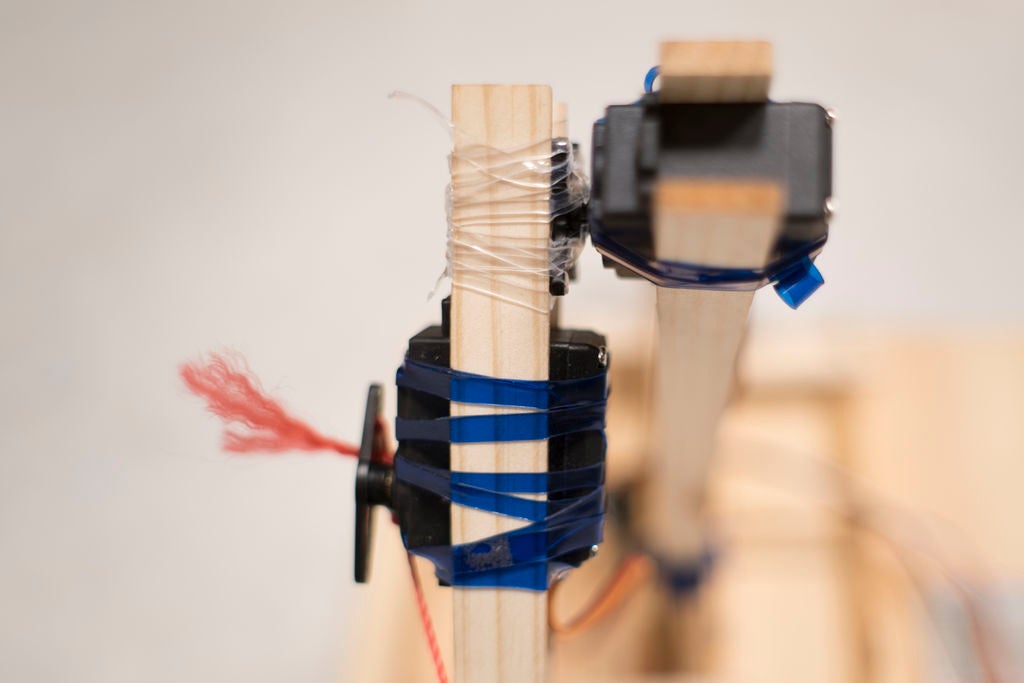
步骤6:夹持器

我们考虑过不同类型的夹具,我们不确定我们要做什么。最终,我们决定使夹具的一侧静止,以便它具有牢固的抓地力。正如您在下图中所看到的,对于移动部件,我们制作了一个关节,由伺服控制并添加了一个用于关闭和打开的弹簧。
第7步:完成!

最后,我们在弹性管内放置了一些字符串,用于连接伺服电机和夹具,这与您可以找到的机制相同自行车刹车。
-
机械手臂
+关注
关注
2文章
101浏览量
41670 -
Arduino
+关注
关注
188文章
6468浏览量
186929
发布评论请先 登录
相关推荐
机械手 OEM 的应用
机器视觉控制机械手的具体过程
PLC在机械手控制系统中的具体应用


PLC无线通讯技术在汽车喷涂车间机械手臂上的应用

ZR机械手:提高生产效率,降低成本的有效途径-速程精密

ZR机械手:推动制造业向更高水平发展

ZR机械手:实现高效、精准、安全的自动化生产
ZR机械手:技术升级,推动产业变革
ZR机械手:提高生产效率的利器
工业盐码垛机械手生产优势






 工商网监
工商网监
评论