 跟踪相机的制作
跟踪相机的制作
第1步:收集材料
Raspberry Pi Model B 2(或
L298N H桥电机驱动器
带齿轮箱的电机
跳线
带螺母的机械螺丝
齿轮
环氧/热胶
可选:激光
第2步:力学

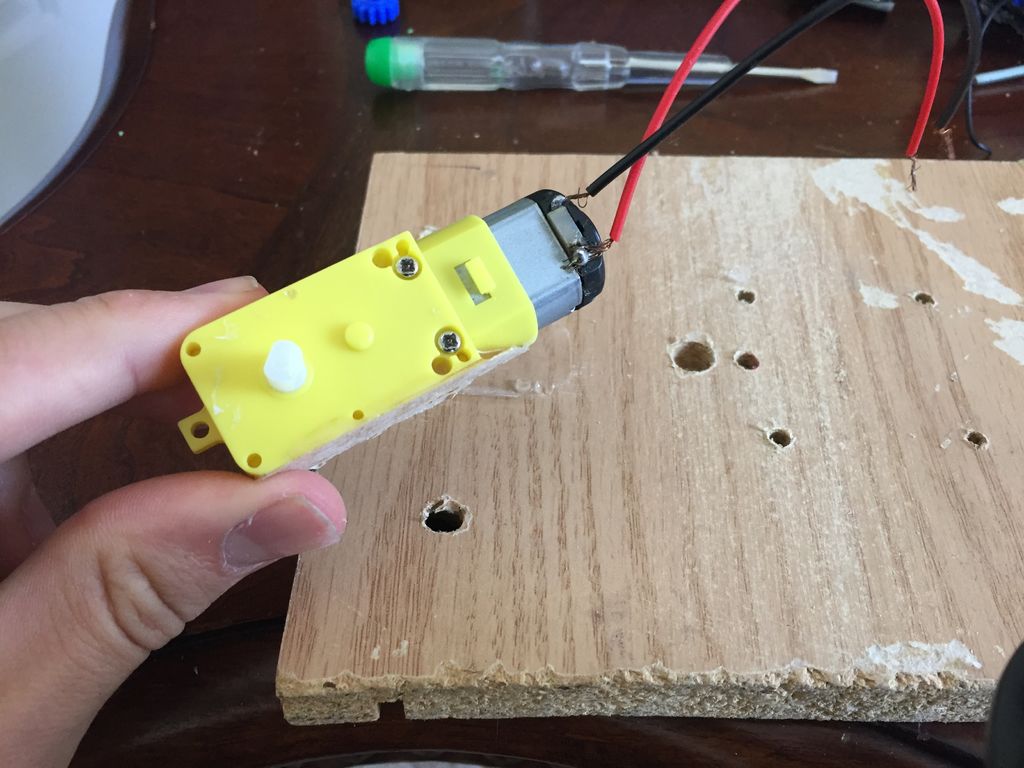
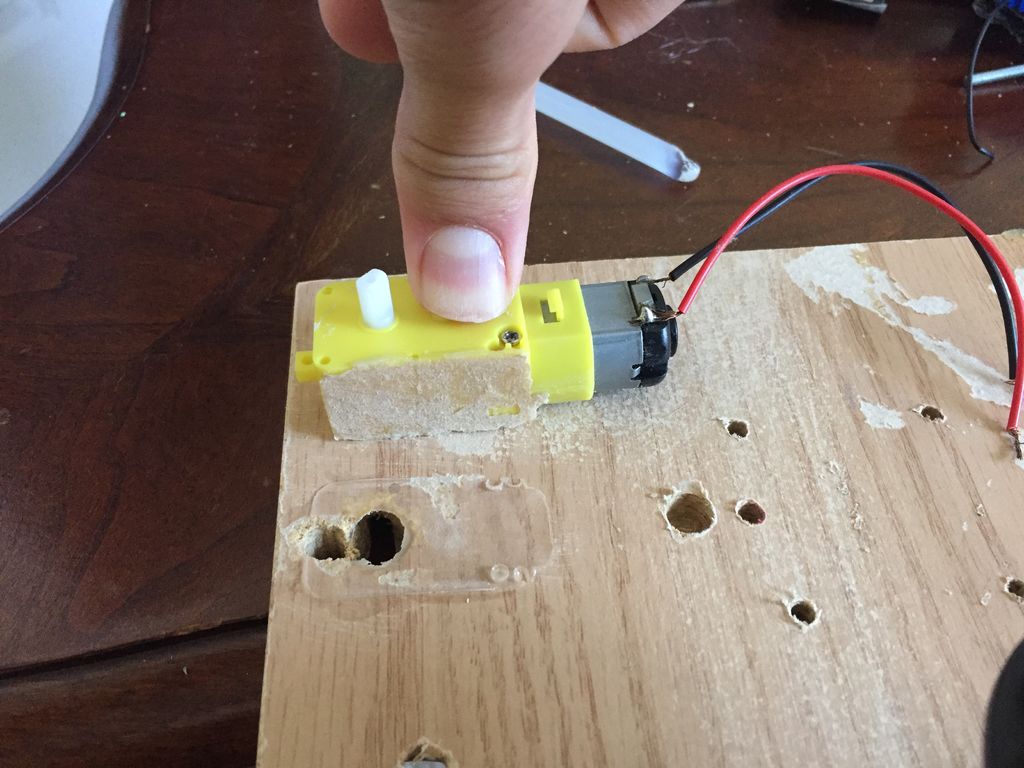
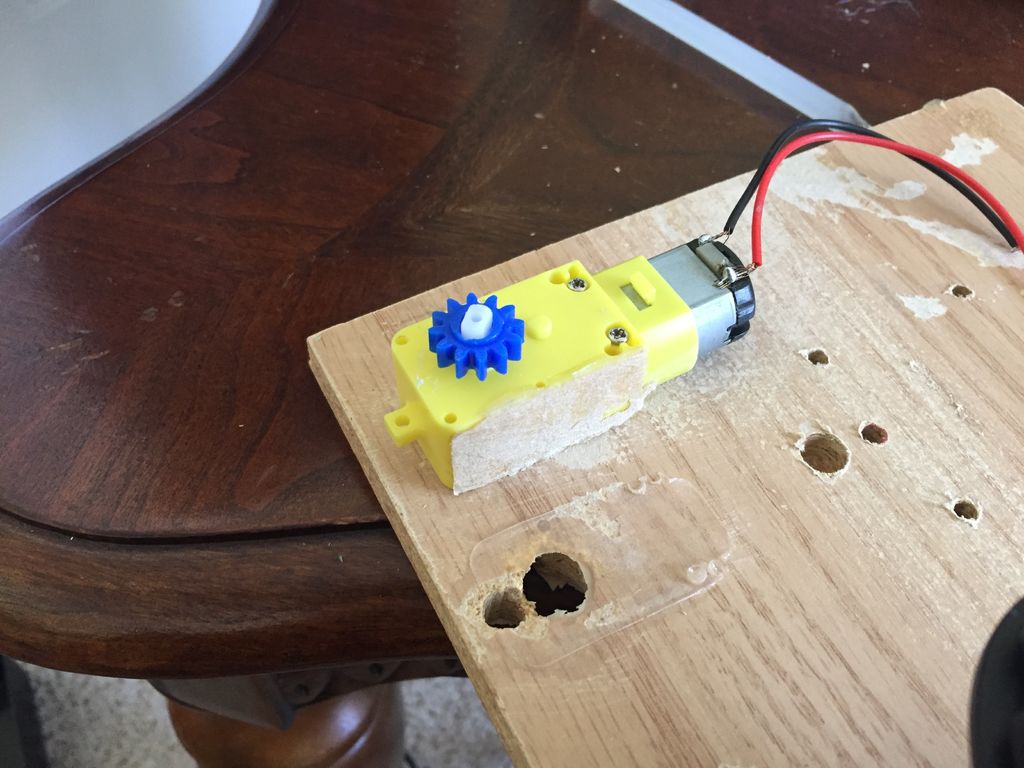

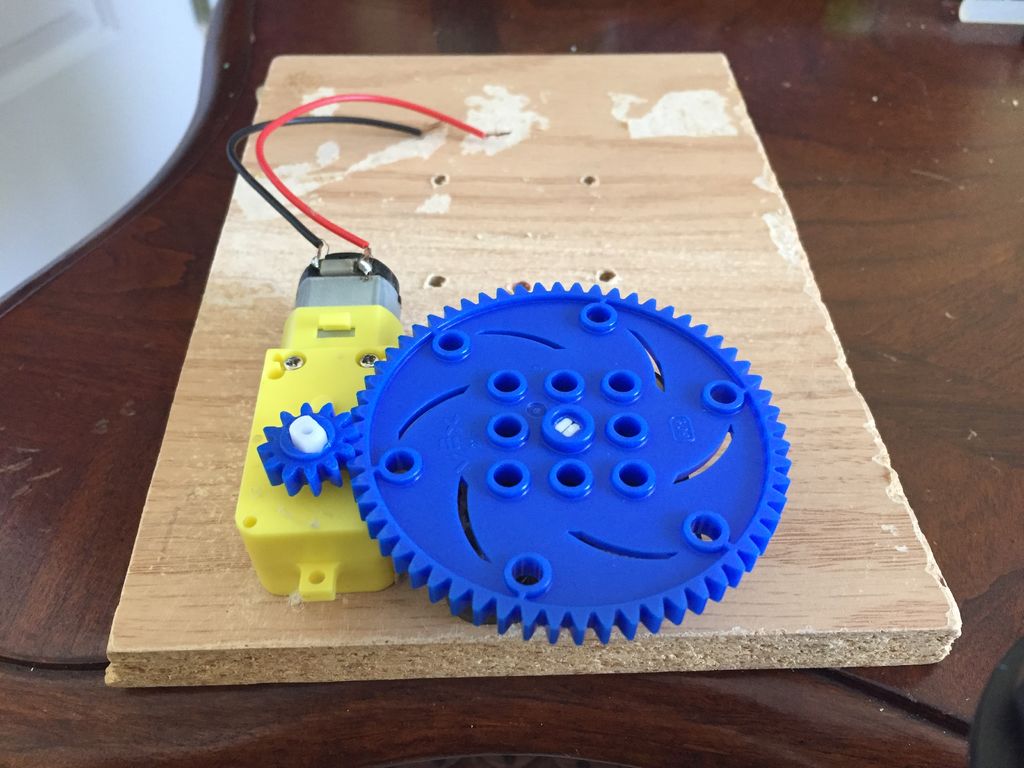

使用废木片(我的那块)有很好的打击,这是好的),将电机安装在不在中间的位置。然后,在电机上安装一个小齿轮。齿轮上的孔可能需要放大以适应电机的配件。
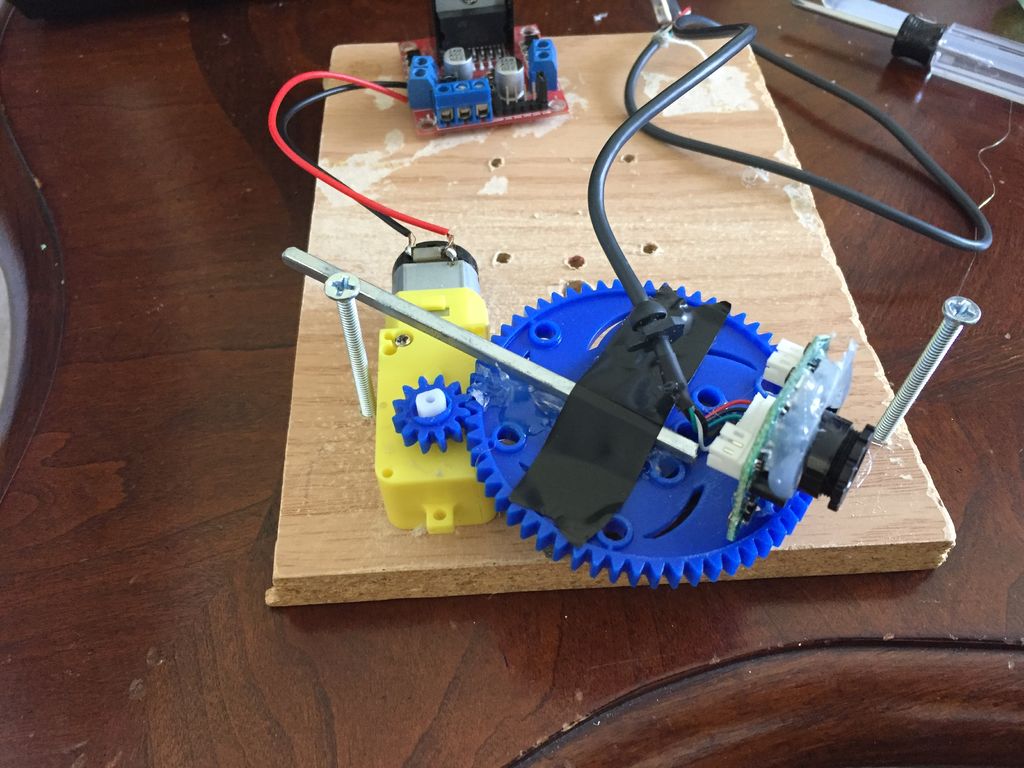
下一步是安装大齿轮(松动),使其齿与小齿轮齿啮合。在用砂纸粗化木材之后,使用热胶将其安装到板上以获得更好的粘合。
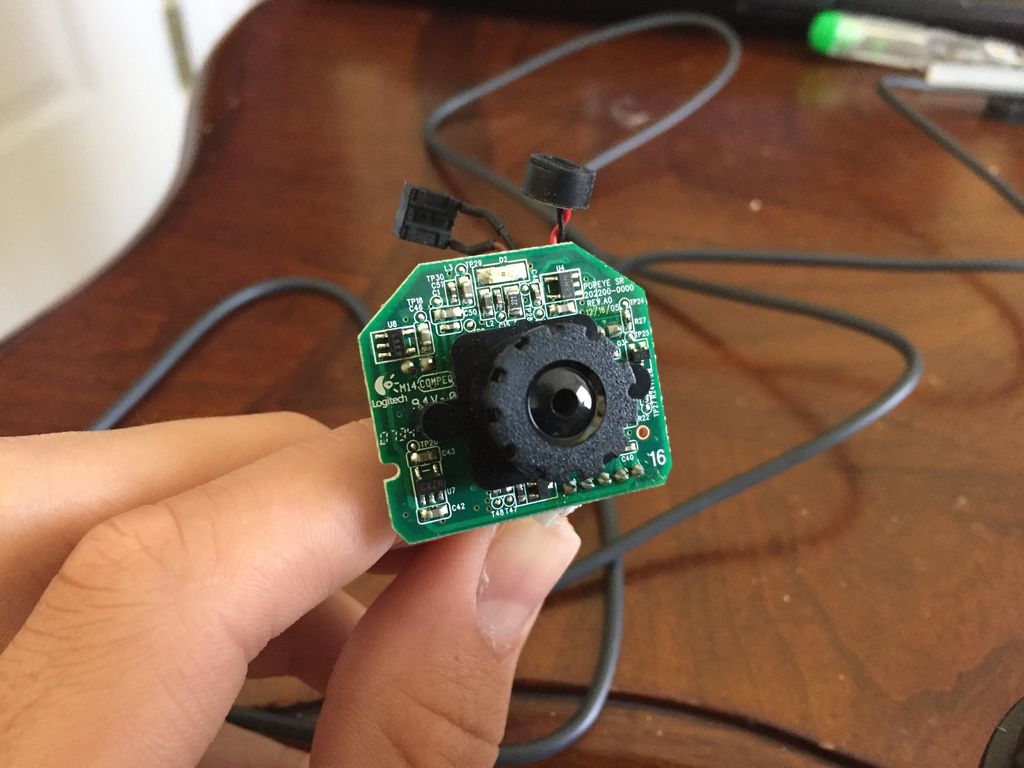
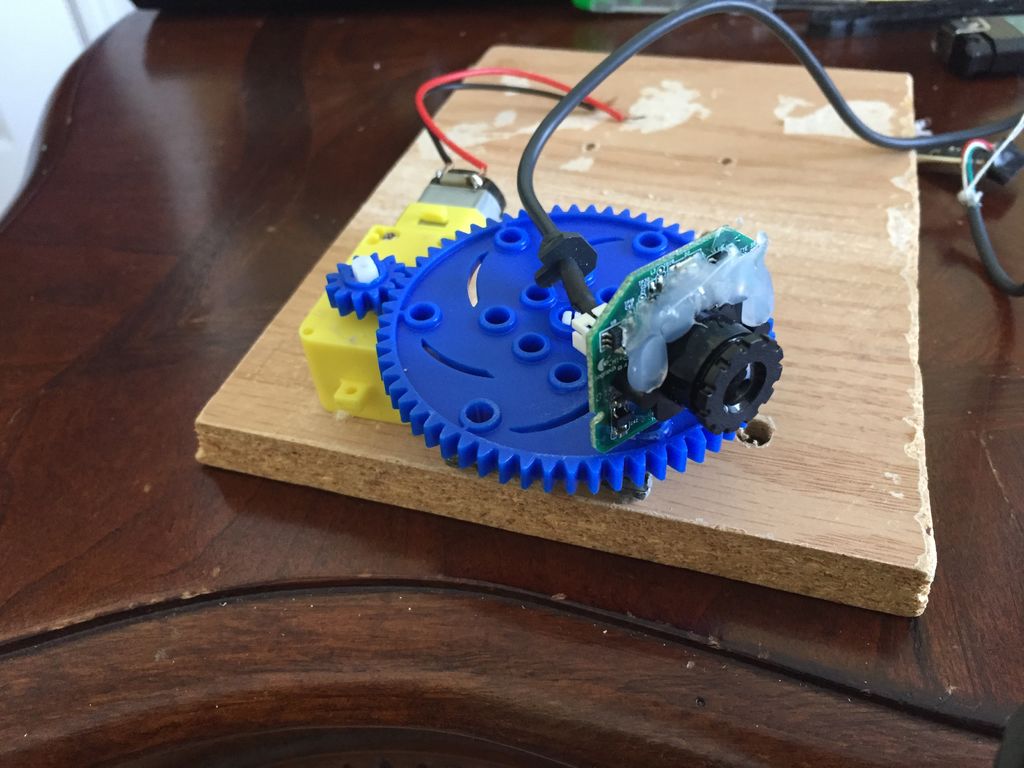
齿轮到位后,是时候将网络摄像头安装到大齿轮上了。在这里,我已将网络摄像头从其外壳中取出,并仅使用网络摄像头的核心电路板,以便于安装。网络摄像头使用环氧树脂粘合剂粘合在一起。
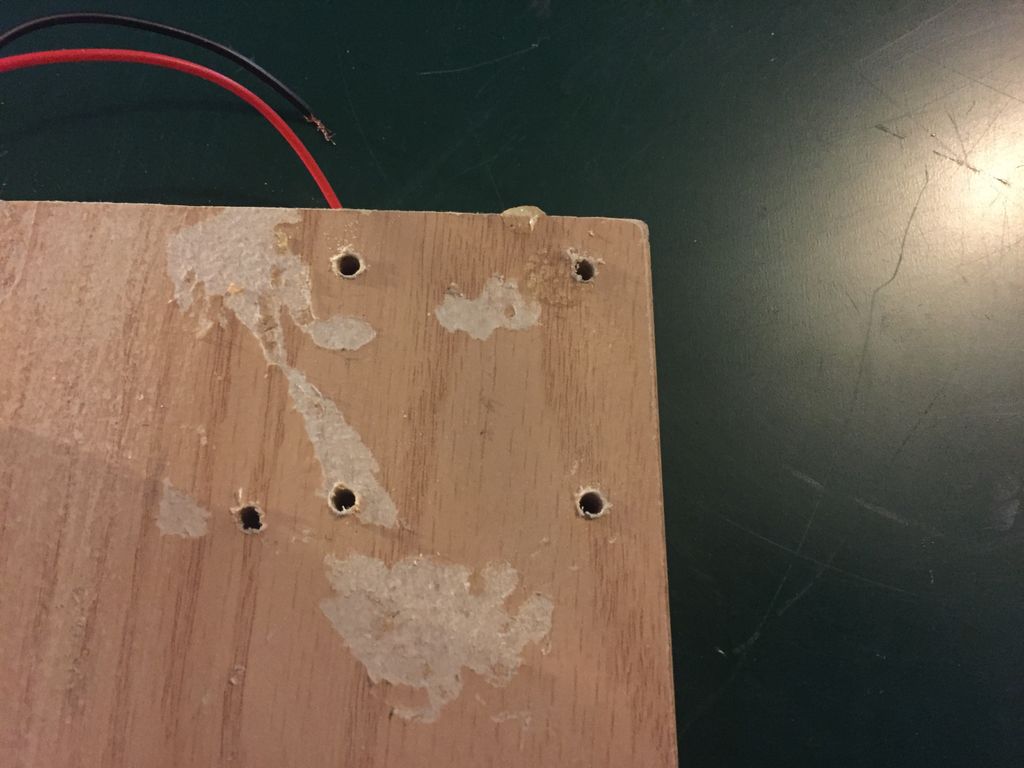
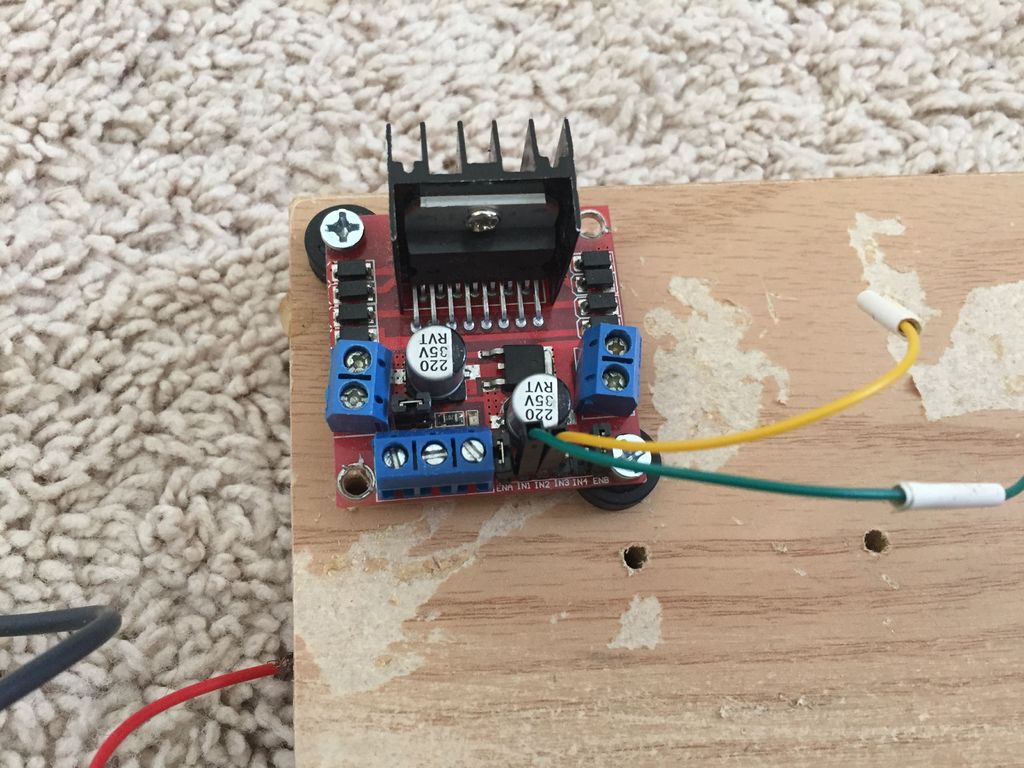
要安装的最后一个组件是可选的 - 用于L298N H桥。这可以通过简单地在电路板上钻四个孔并使用机械螺钉和六角螺母安装电路板来安装。
步骤3:接线
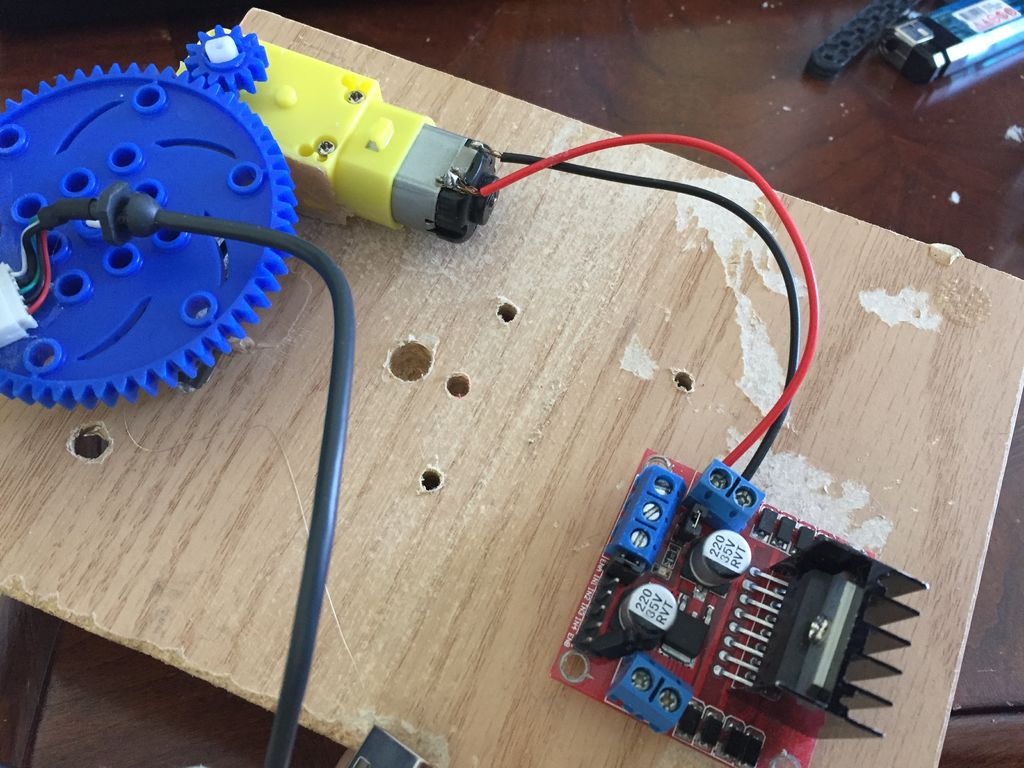
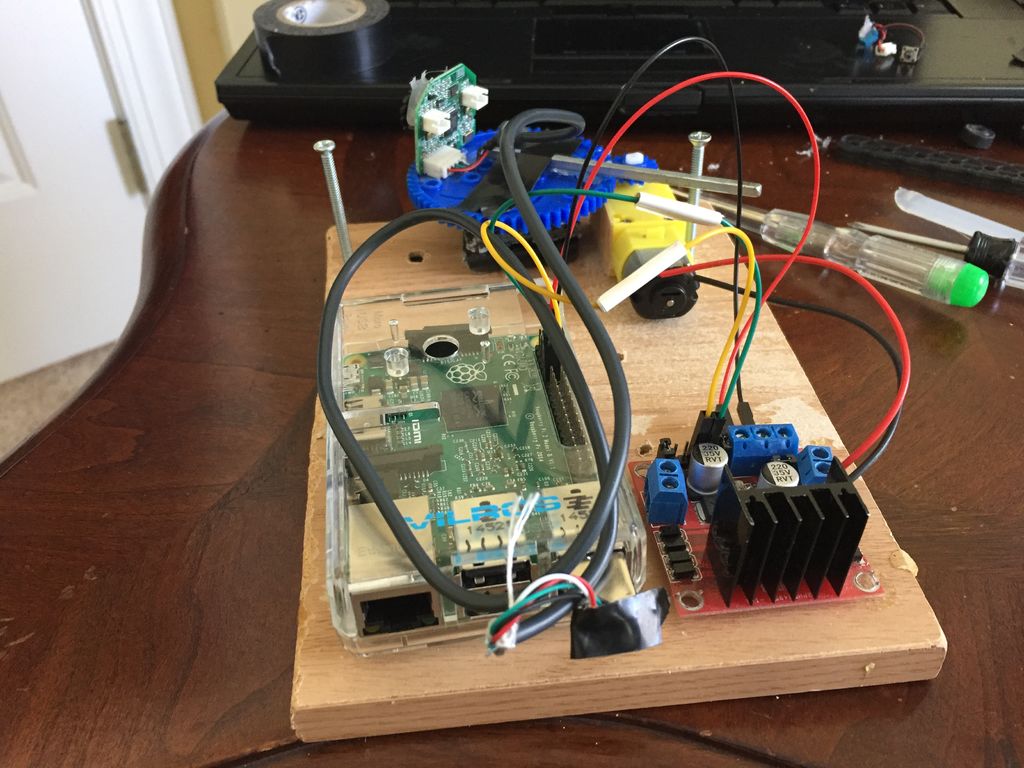
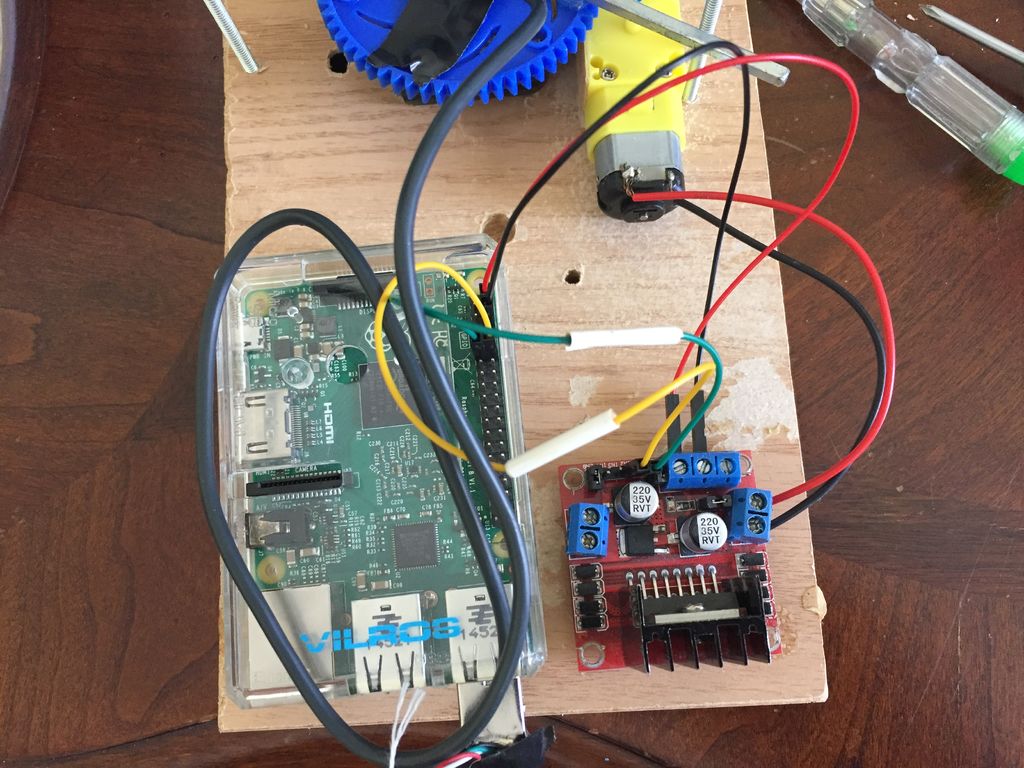
现在将所有内容挂钩。电机的两根电线将直接连接到电路板左侧或右侧的两个端子连接器之一的L298N H桥(我选择了左侧)。需要使用两根导线将L298N的5V和地连接到Raspberry Pi的5V和接地电源。然后,需要两根母 - 母跨接线从L298N连接到Pi的引脚17和18.网络摄像头只需连接到其中一个Pi的USB端口。这就是所有的布线!
第4步:代码
现在是这个项目最具挑战性的方面。
我使用Python的OpenCV库实时跟踪球。该程序还利用Pi附带的gpiozero库根据OpenCV确定的球的x坐标转动电机。该代码能够根据其黄色确定球的位置,该黄色应该是背景中唯一的,以便有效。向程序提供较低和较高的颜色范围,以确定球的位置。然后,OpenCV使用以下参数调用.inRange()函数:当前帧(来自网络摄像头)以及下部和上部颜色边界。确定框架上球的坐标后,如果球不在中心(640像素宽框架中x坐标范围为240-400),程序将告诉电机转动。如果球偏离中心,则电动机将转动更多,而当球更靠近中心时,电动机将转动更少。
这就是代码的工作原理。
注意:如果您要使用代码,则必须安装OpenCV。此外,如果电机转向错误,只需将进入L289N的电线反转,或反转连接到Pi的控制gpio线。
-
相机
+关注
关注
4文章
1358浏览量
53721
发布评论请先 登录
相关推荐
开源项目!打造一款FPV头部追踪相机,让你仿佛置身遥控车之中!
100Hz跟踪难实现? 慧视定制RK3588轻松破局






熔池监控相机的原理是什么
Sony-7520相机用图像处理板定制
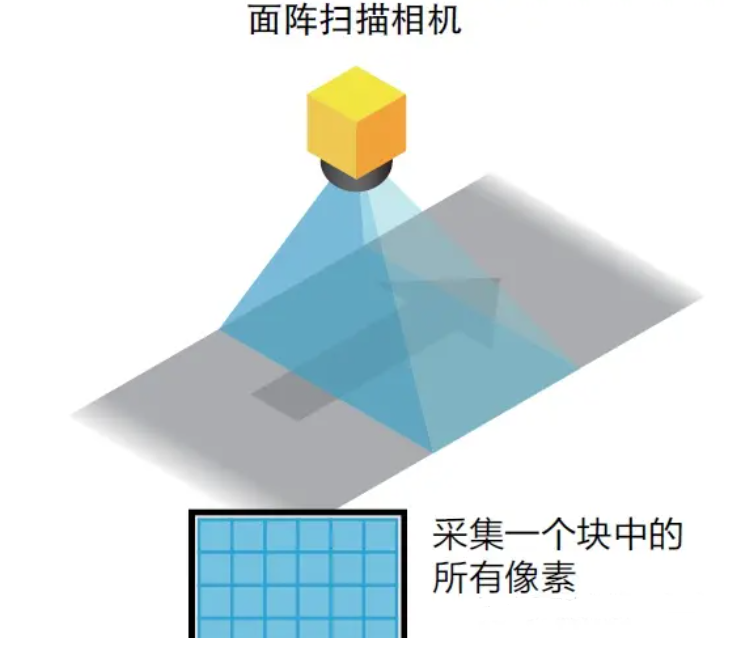
面阵相机和线阵相机的区别
图像跟踪设备发展历史





 工商网监
工商网监
评论