 如何制作超声波雷达
如何制作超声波雷达
步骤1:接线图
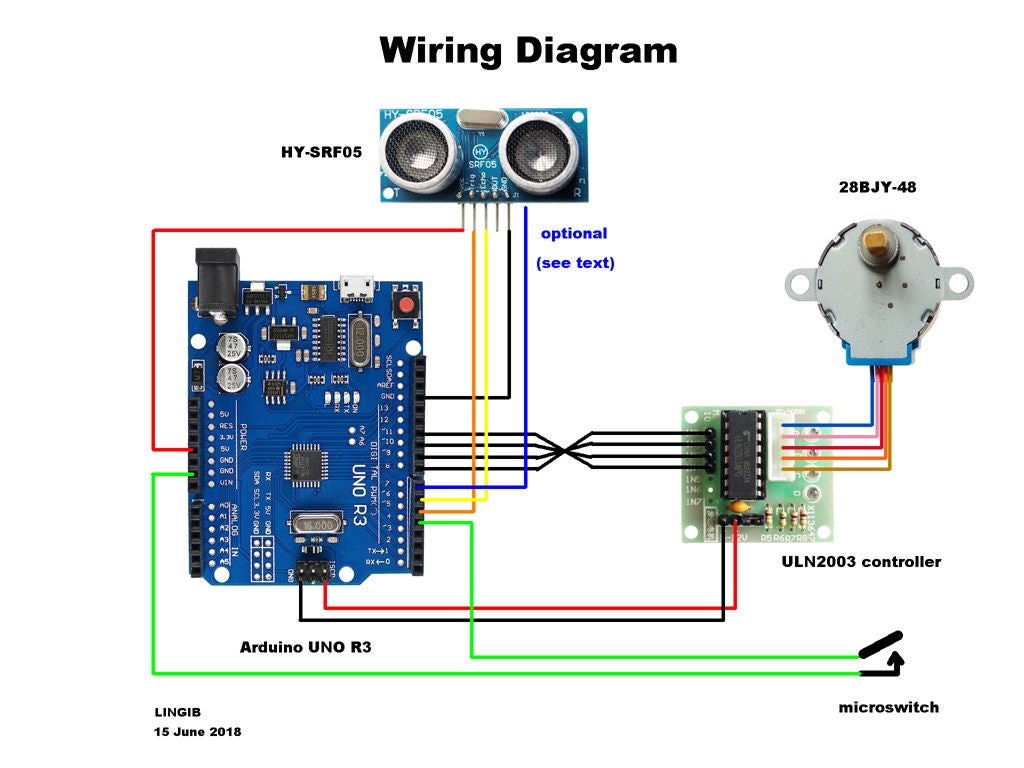
接线图显示在photo1中。
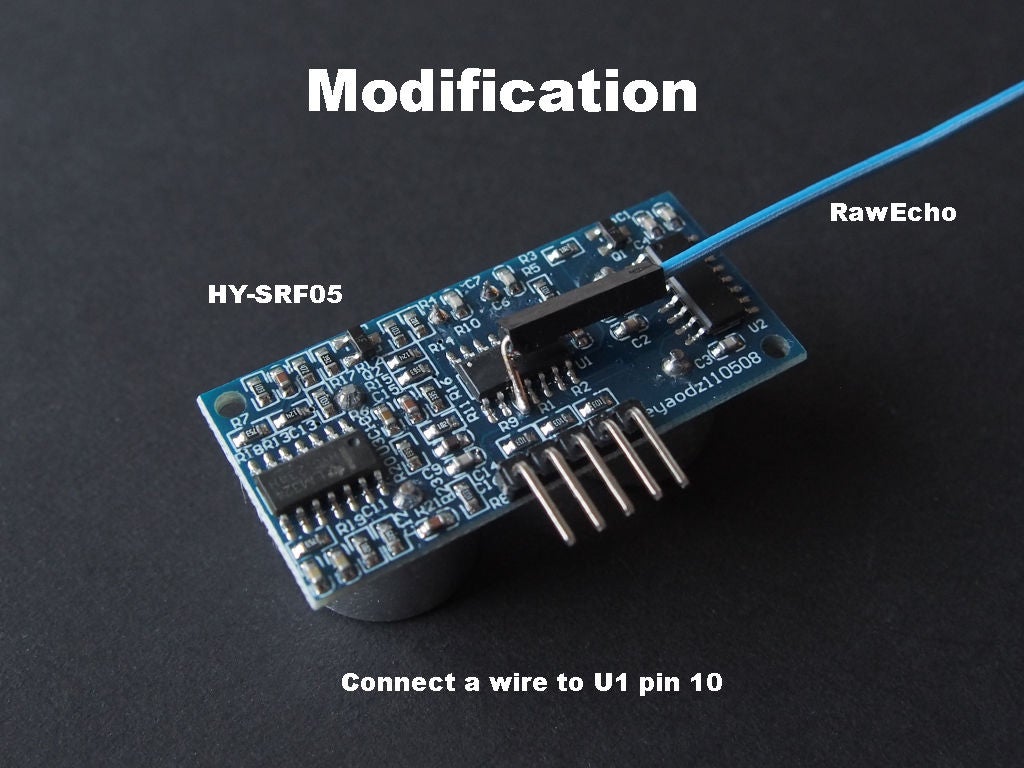
照片2中显示了可选的修改。此修改是HC-SR04和HY-SRF05超声波传感器的相同,并允许检测多个回波。
如果您有HC-SR04,焊接电线的集成电路标记为U2
步骤2:零件清单
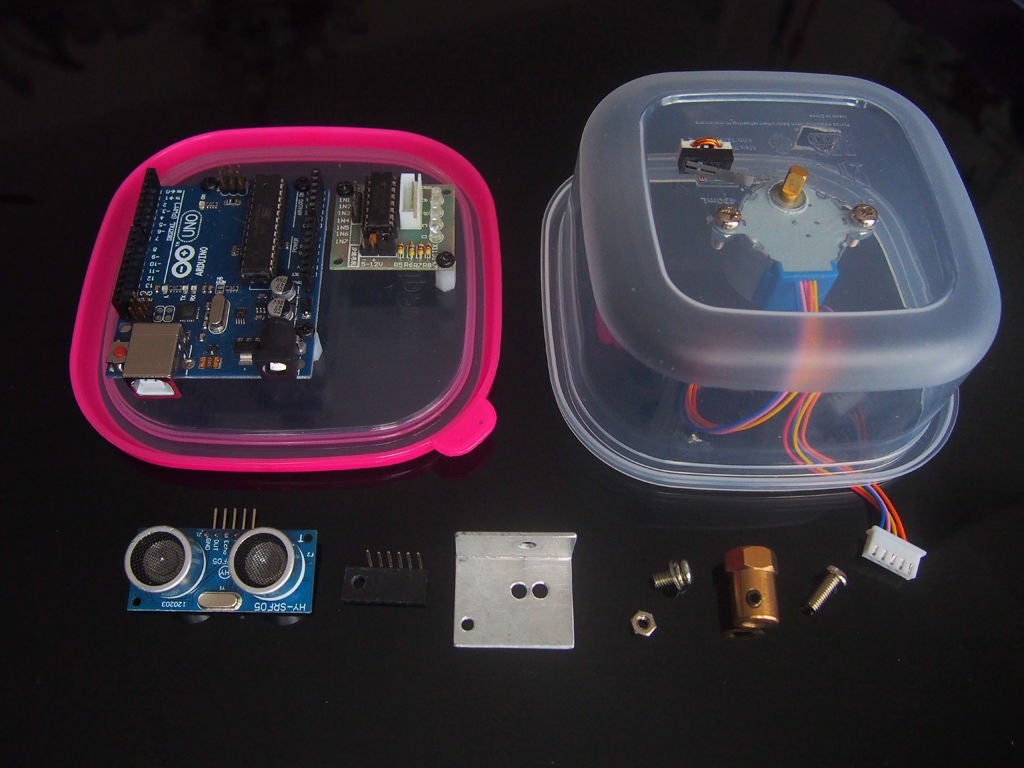
以下部分是在当地获得的:
1只有塑料食品容器。
1只有超小型微动开关。
1只有公头条(用于连接传感器的电线)。
1只母头条(用于安装传感器)。
1只20规格铝(废料)板材40mm x 55mm。
6只9mm尼龙垫片轻敲3mm。
仅3根电缆扎带。
13只3mm x 6毫米螺栓。
1只3mm螺母。
4只有4mm x 10mm螺栓。
2只有4mm螺母。
1只有28BJY-48 5伏步进电机compl与ULN2003控制器一起使用。
1只用于模型车的5mm内径黄铜六角轴到车轮耦合器。
1只有HY-SRF05(或HC-SRF04)超声波传感器。
第3步:工作原理
该电路包括Arduino,超声波传感器,步进电机和微动开关,用于将传感器移动到其家中。位置。微动开关是必要的,因为它的64:1内部传动装置无法用手旋转步进电机。
当首次通电时,Arduino将传感器旋转到其“原位”位置,由微动开关确定,然后“轮询”显示器直到它得到响应。
28BJY-48步进电机的“步幅”为5.625/64度,这意味着无法进行1度步进(即使我们的刻度标记为0..180度)。
幸运的是,180/stride-angle = 180 * 64/5.625 = 2048,它可以被8整除。如果我们从0..2048增加一个数字并除以8,那么我们得到256次剩余零。..我们只需在余数为零时发送“ping”。这相当于每个PI/256弧度或0.703125度的“ping”。
软件[1]
然后显示屏接受控制并不断询问Arduino提供以下数据:
方位角
距离1
距离2
方向
然后在屏幕上显示每个“方位角”的“距离”。 “方向”信息用于创建“光束”在旋转时出现的“点”错觉。
只要数据发送到显示器,Arduino就会自动移动到下一个“ping”位置。
[1]
用于编写显示的“Processing 3”软件可以从https://processing.org/download/下载
Processing 3支持2D和3D图形,与Arduino IDE(集成开发环境)非常相似。主要的视觉差异是代码运行时的“图形窗口”和使用“draw()”函数而不是Arduino“loop()”。
步骤4:显示器
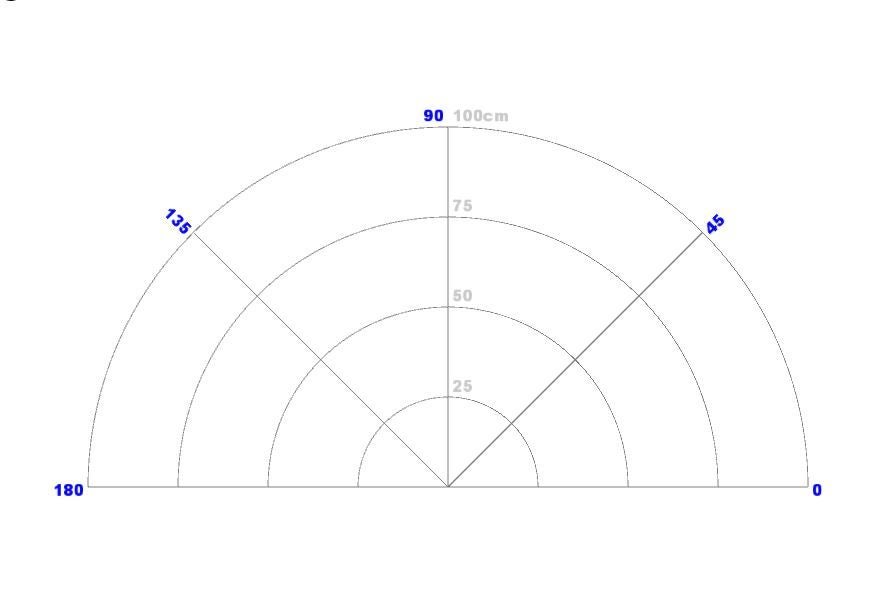
The Graticule
我选择创建180度图形显示,因为它提供了一个“雷达阴影”,可以在试验时站立。如果我想使用一个,这种显示器也与伺服电机兼容。通过调整代码可以获得完整的360度显示。
以下照片说明了如何创建经纬网:
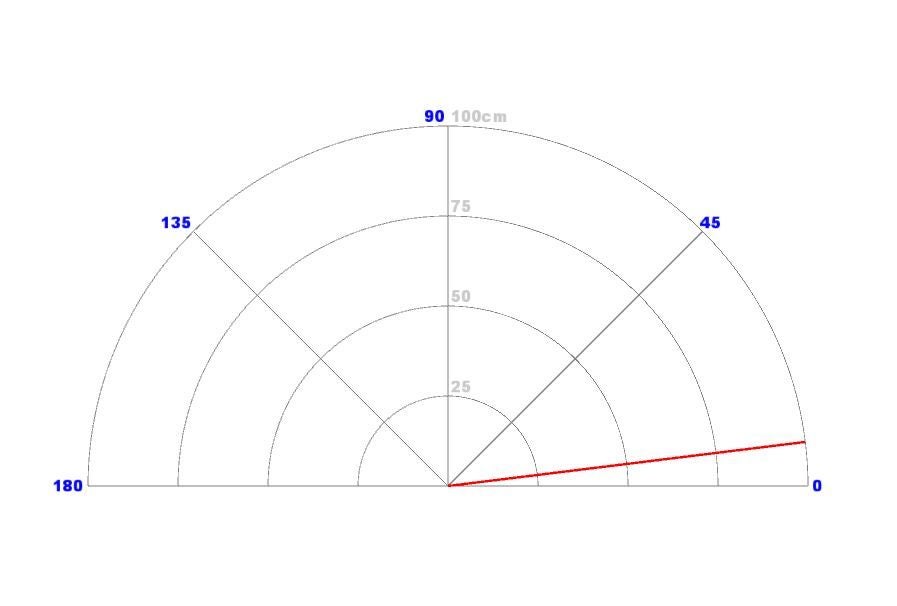
照片1
经纬网包含许多“弧线”和“线”。这张照片中显示了有角度的标签,但之后被放弃了,更倾向于水平文字,更容易阅读。
照片2
显示红线描绘“梁”。标签中的文字现在是水平的。
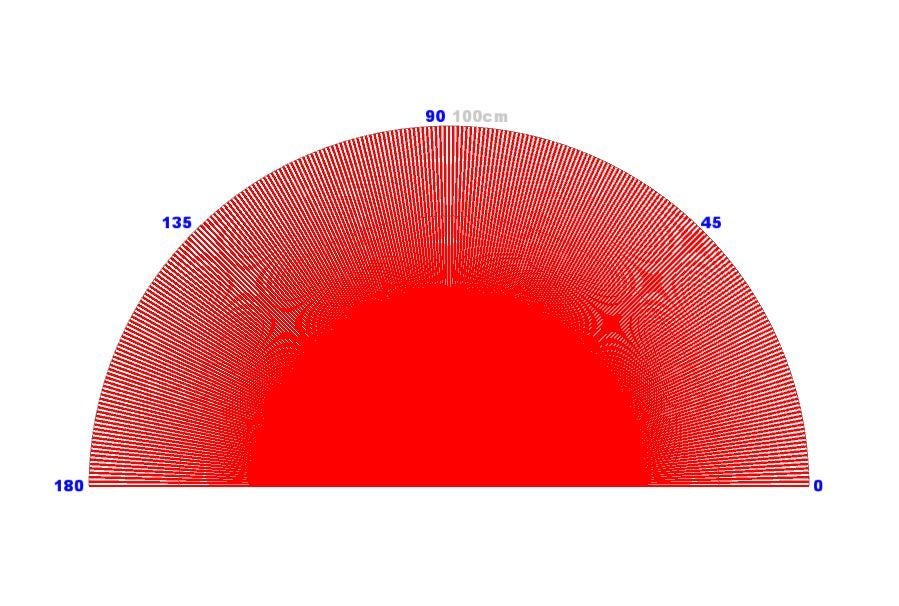
照片3
照片2中的红线已经旋转了0..180度到256个方位角。在该照片中,由于光束宽度太窄,因此不会覆盖网格的外部部分。这会产生一些奇怪的瑕疵。
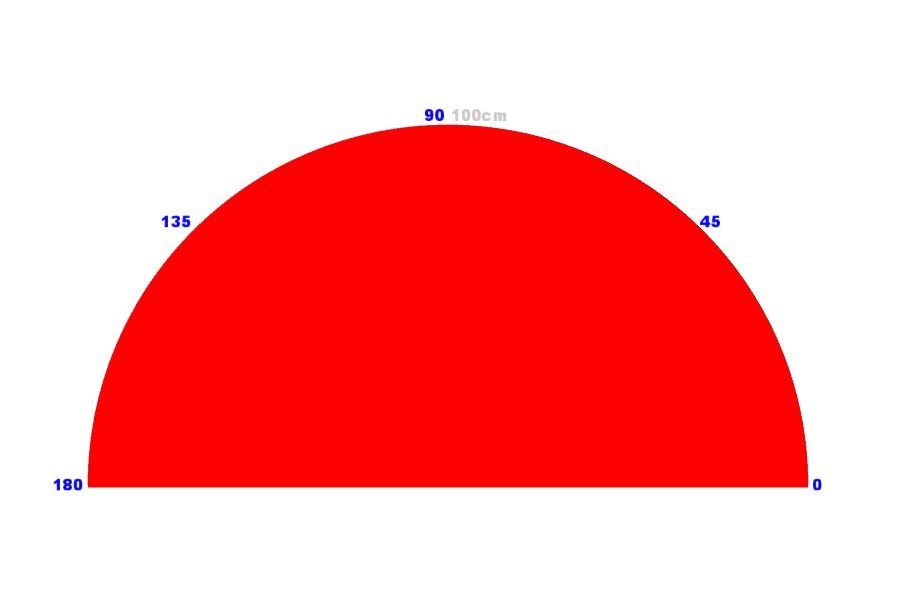
Photo 4
增加光束宽度可以消除这些瑕疵。
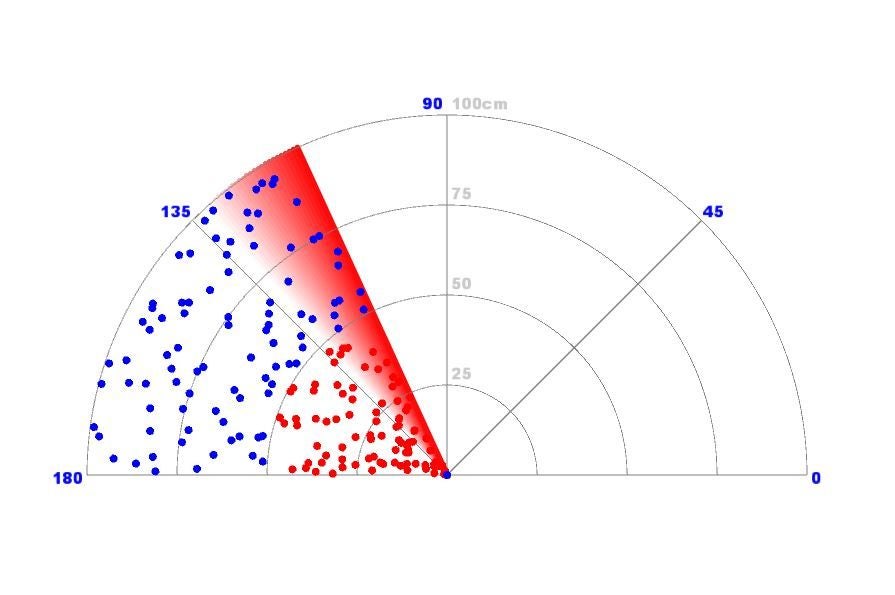
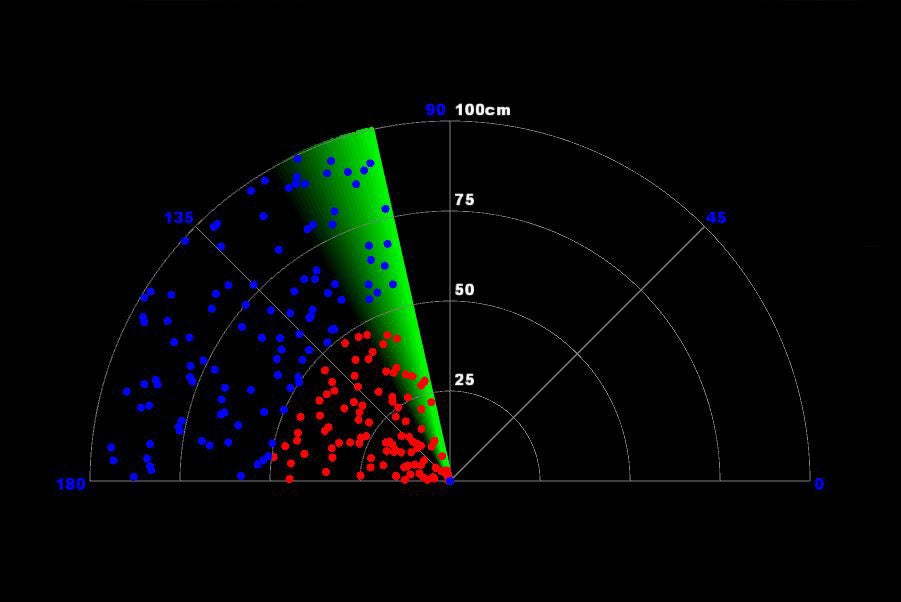
照片5
引入了随机点来表示主要(红色)和次要(蓝色)回声。可以更改的范围设置为100cm以匹配显示。还引入了衰落光束图案。用于创建这种“褪色光束”的技术将在下文进一步解释。
Photo 6
配色方案已经改变,增添了一丝真实感。
动画
图形显示的动画部分使用3D图形来大大简化代码。为了理解这是如何可能的,让我们从(0,0)的XY起始坐标绘制一个恒定半径的“30度线”。
2D图形需要使用sin(30)和cos(30)来计算线的XY端坐标:
X=cos(30)*radius = 0.866*radius
Y=sin(30)*radius = 0.5*radius
line(0,0,X,Y);
3D图形不需要使用三角学。我们只需围绕Z轴旋转XY网格坐标,然后绘制一条水平线。
pushMatrix(); //preserve our current grid coordinates
rotateZ(radians(30)); //rotate our XY grid coordinates about the Z-axis
line(0,0,radius,0); //draw a “horizontal” line on the rotated grid
popMatrix(); //restore our grid coordinates
无论哪种方式都有效,但第二种方法适用于& #8220;平” PI/256弧度的间隔。
褪色线
光束有自己的虚拟屏幕。在绘制任何一行之前,“ alpha”所有先前行的(不透明度)减少了一小部分。最终,最早的线条变得无形,给人一种褪色的幻想和“粉丝”。
每当刷新显示时,此虚拟屏幕(从不擦除)将与主屏幕的内容合并。
步骤5:安装支架
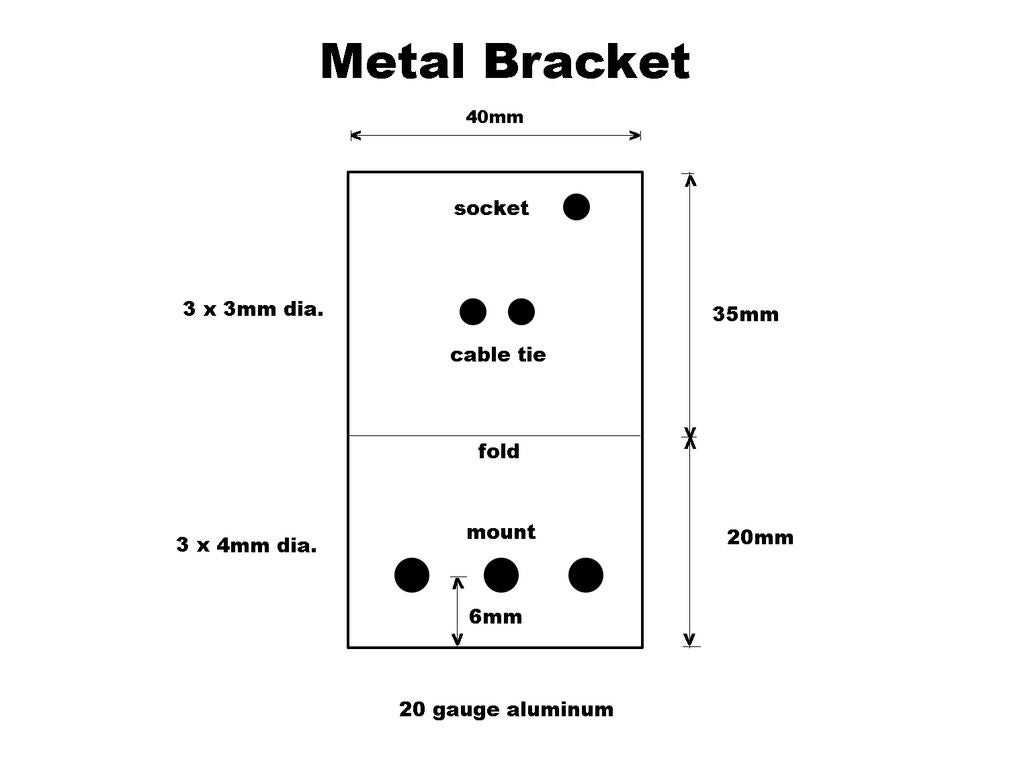
合适安装支架的钻孔模板如图1所示。
定位两个外部“安装&# 8221;传输(T)和接收(R)传感器下方的孔。我发现如果传感器围绕接收(R)传感器而不是两个传感器之间的中间旋转,则获得最佳结果。
第6步:汇编
USB电缆孔
请勿尝试为USB钻孔电缆孔连接器虽然塑料容器的侧面作为塑料倾向于分裂和芯片。相反,使用热烙铁的尖端熔化孔,然后用锋利的刀修剪。注意不要吸入烟雾。
轴伸展器
更换其中一个4mm“平头螺钉”在带有4mm x 10mm螺栓的轴伸扩展器中。该螺栓用于激活微动开关。
微动开关
定位微动开关,使其在4mm螺栓上被激活轴沿顺时针方向旋转。
我用两匝20规格的铜线将微动开关连接到外壳上,因为没有现成的2mm螺母和螺栓。
剩余组件
布局并不重要。电机轴位于中央。 Arduino和电机控制器安装在尼龙垫片上,可以将电线夹在下面。
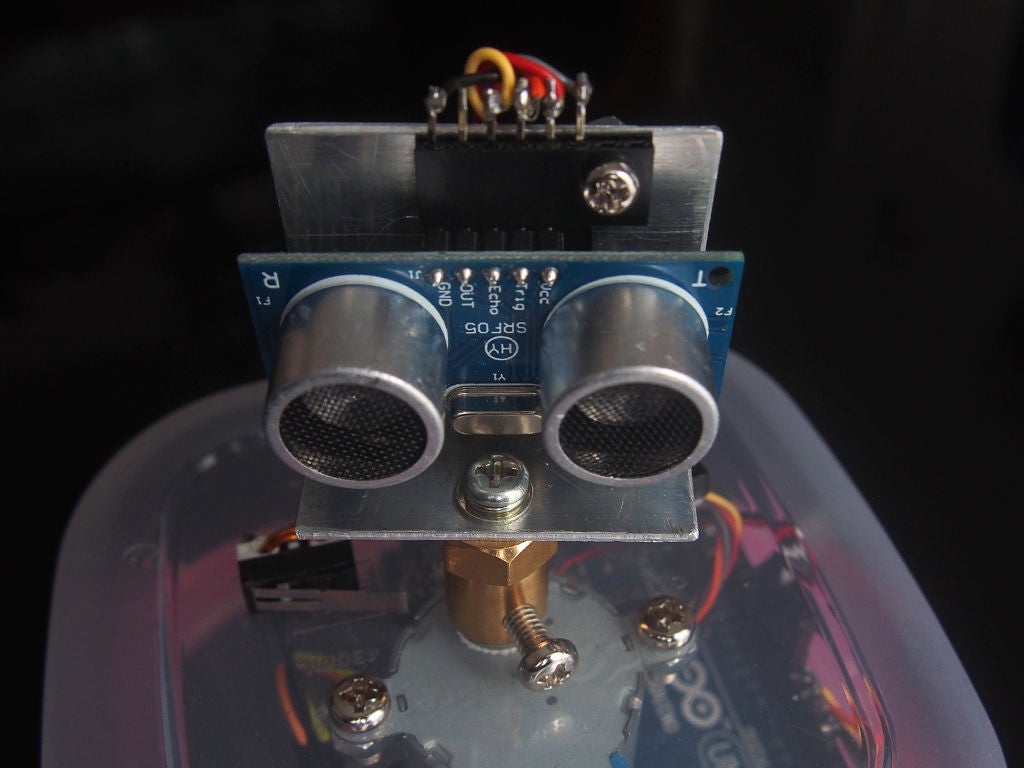
安装传感器
照片1
显示传感器组件。 HY-SR0F-5插座采用母头插座设计。所有不需要的销钉都已拆除,并在塑料上钻了3毫米的孔。然后通过3mm螺母和螺栓将割台连接到支架上。
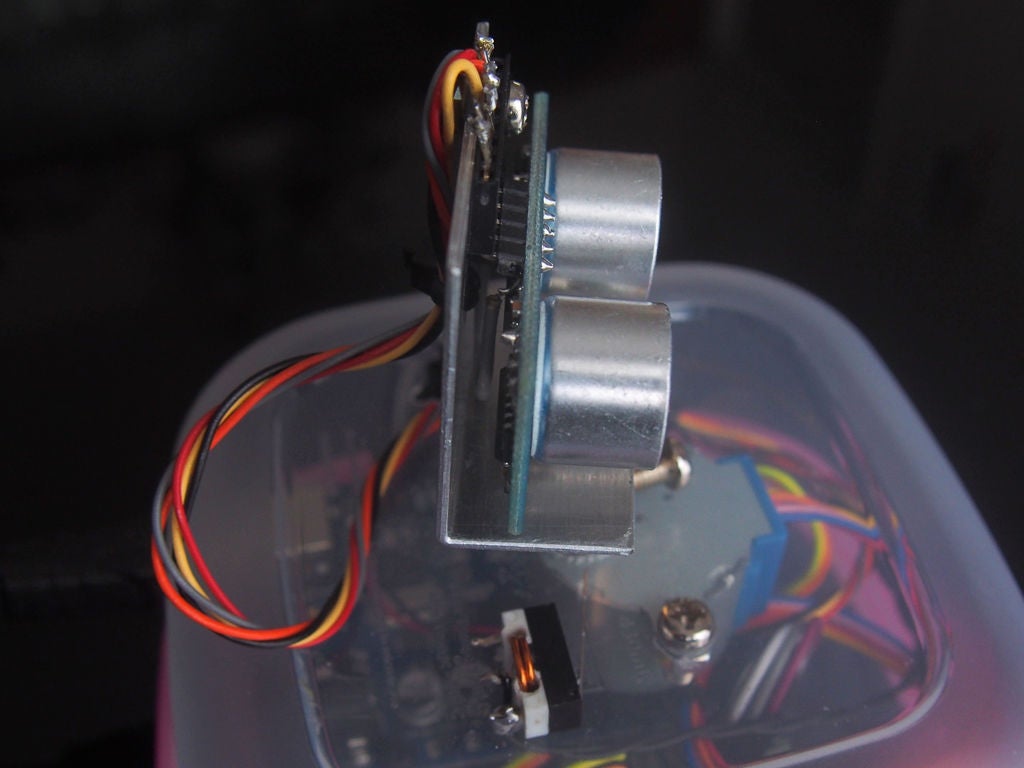
Photo 2
显示传感器组件的侧视图。头部的电线与支架电缆连接。这“消除压力”传感器旋转时可防止不必要的电缆移动还要注意“灰”导线连接到IC1的引脚10。这根电线是可选的,可将二次回波馈送到Arduino。
上电后微动开关操作后,将传感器组件安装到轴延长器上。然后轴在其家中”位置。
步骤7:软件安装
按此顺序安装以下代码:
Arduino IDE
处理3
声学雷达发送器下载并安装处理3 [1]
将附件的内容“ acoustic_radar_sender_2.ino”复制到Arduino“ sketch”,保存,然后将其上传到您的Arduino Uno R3。
关闭Ardino IDE,但保持USB电缆连接。
声雷达接收器
复制附件的内容, #&8220; acoustic_radar_receiver.pde”处理“草图”。
修正
[1]
“acoustic_radar_sender_2.ino”修复“acoustic_radar_sender_1.ino”中的“scan-creep”错误。感谢https://www.instructables.com/member/newtoeu/instr 。..指出来。
第8步:测试
单击左上角“运行”处理窗口中的按钮,您的项目将会突然变为现实。
尝试检测不同的物体:
附近的物体要求发射(T)传感器较低,以防止“光束”通过顶部。
更远的物体需要更大的表面积,因为随着光束的扩散,声能损失很多。..。..加上回波也会扩散。
试验三个安装孔。
您可能希望尝试垂直安装传感器,以便发送和接收波束宽度重叠。
-
超声波雷达
+关注
关注
1文章
72浏览量
4283
发布评论请先 登录
相关推荐
雷达液位计和超声波液位计的六大区别
超声波液位计与雷达液位计的优缺点
超声波液位计的工作原理 超声波液位计与其他液位计的比较
超声波测速的原理、方法及应用
雷达探测障碍物是超声波还是次声波
超声波雷达和360影像有什么用
毫米波雷达与超声波雷达的区别是什么
超声波驱动板-超声波它激式驱动板






 工商网监
工商网监
评论