 自动转盘机的制作教程
自动转盘机的制作教程
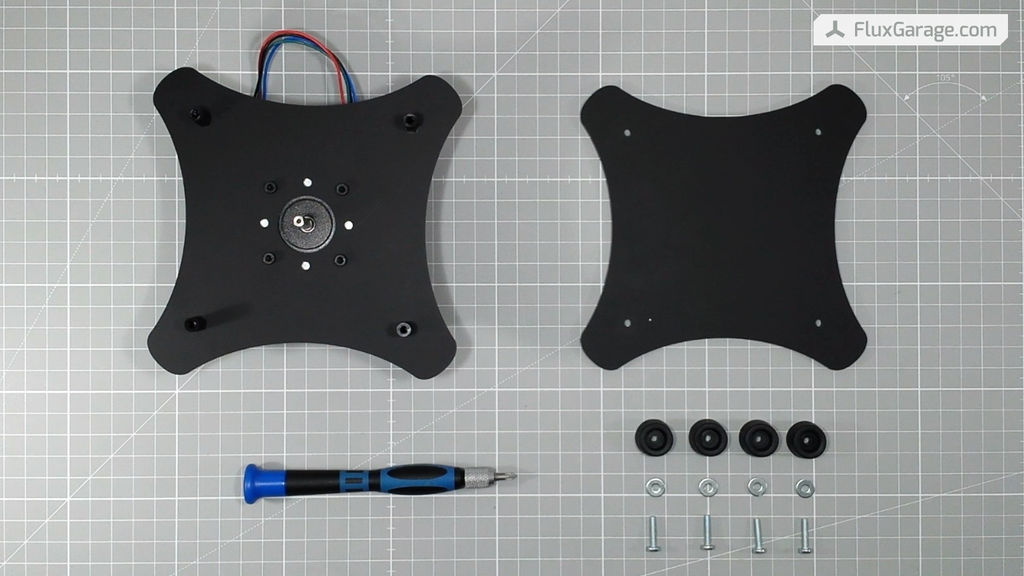
第1步:收集零件和工具

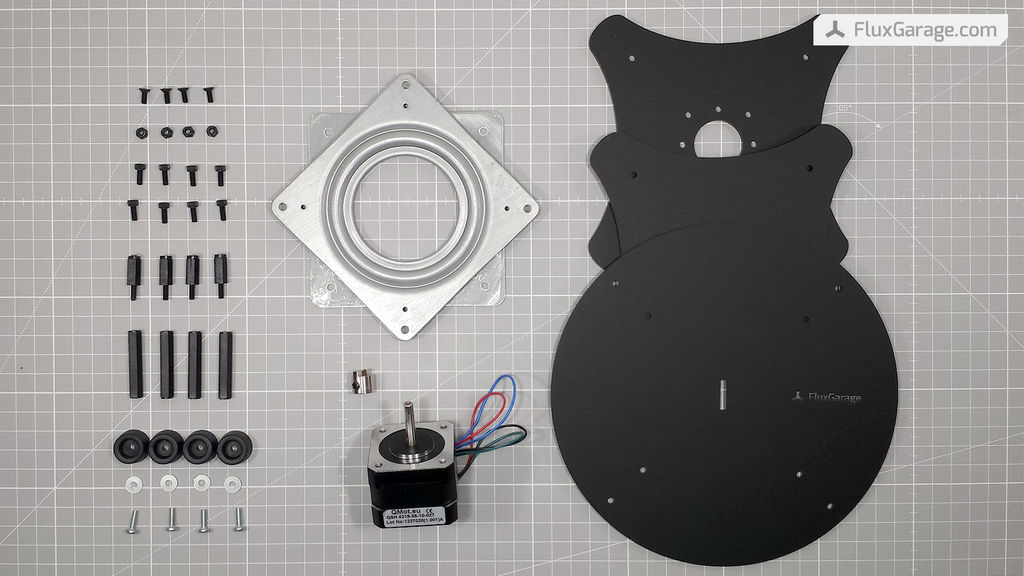
零件
3x Lasercut亚克力板,3mm厚
下载模板eps文件(见下文)并在Ponoko (美国/国际用户)下订单或Formulor (德国/欧洲用户)。选择一种3mm/0.118英寸丙烯酸P1板,你喜欢的颜色。对于我的转盘原型,我选择了材料“亚克力 - 黑色(哑光1面)”。如果您可以访问自己的激光切割机,或者如果您想使用其他服务,只需将矢量路径从名为“您的设计”的eps文件层导入您的首选程序。
1x轴承“Lazy Susan”
孔距顶部:81mm
孔距底:90mm
内径:54mm
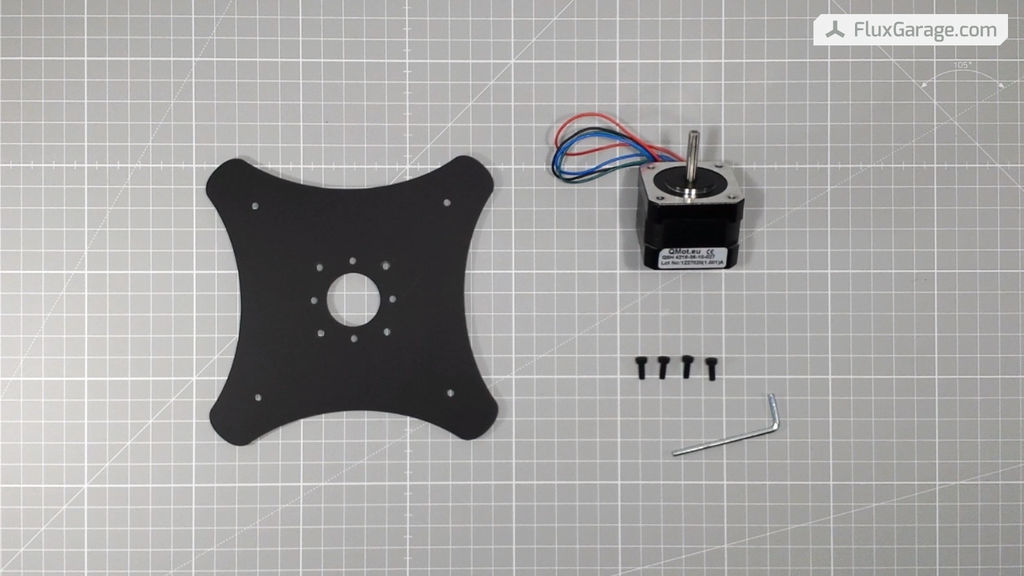
1x驱动器狗/潜水员光盘
内径5mm (必须适合步进电机轴)
1x步进电机
NEMA 17,轴径为5mm
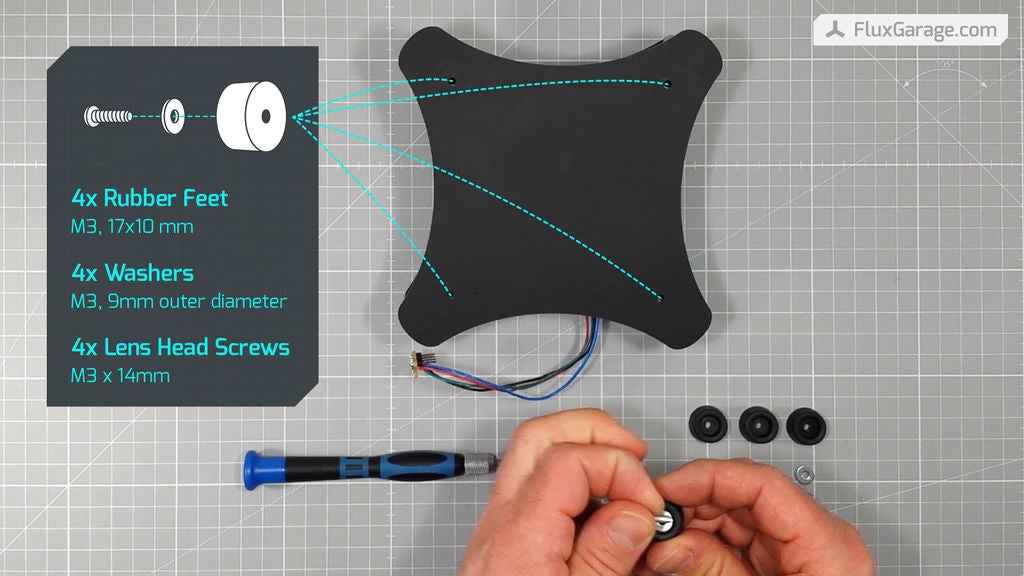
4x橡皮脚
M3,17x10mm
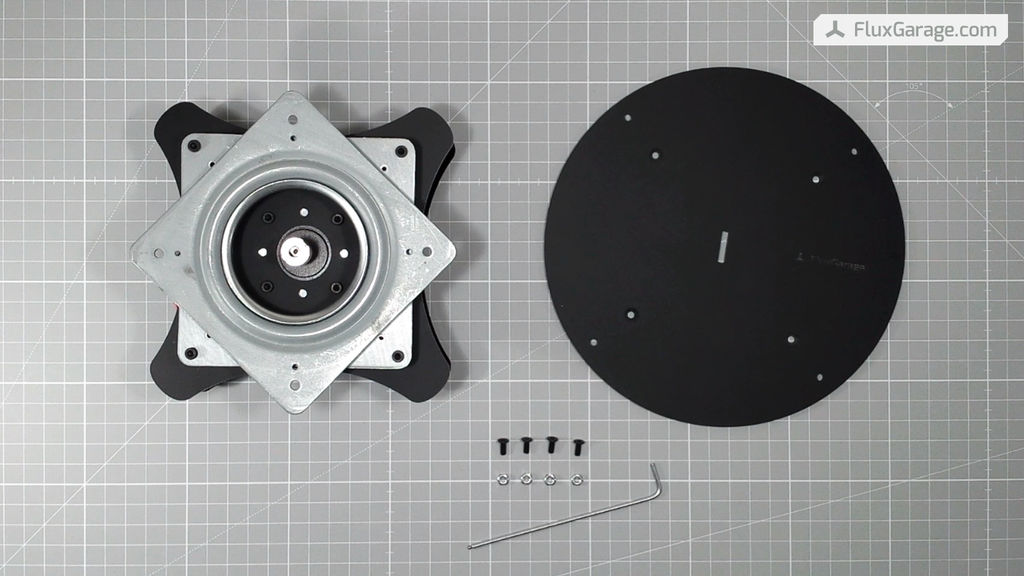
螺钉,螺母,螺栓
•4x沉头螺钉,M3 x 8mm (总长度为8mm,包括头部!)
8x盘头螺钉,M3 x 8mm
•4x镜头螺钉,M3 x 14mm
•4x自锁螺母,M3
•4x Washe rs M3,外径9mm (垫圈应适合橡胶支脚。您还可以购买带垫圈的橡胶脚垫
•4x母 - 男支座垫片,M3 x 15mm
•4x母 - 母支座垫片,M3 x 35mm (请注意:“母 - 母间隔垫片”的高度决定了步进电机的最大高度,这里是35mm。)
我还准备了一些套件,其中包括构建自己的转盘所需的所有部件 - 步进电机除外:
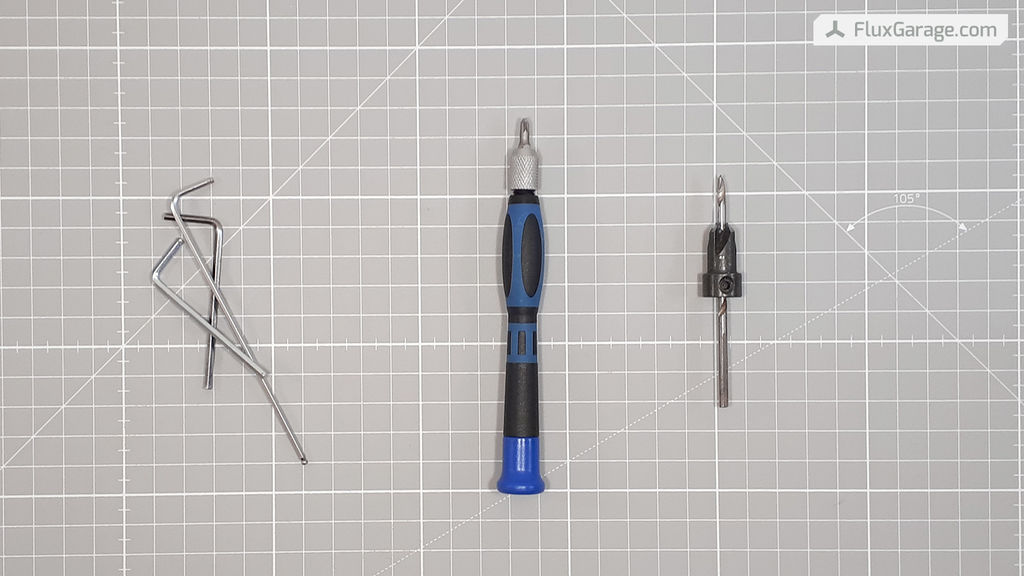
Tools
Some Allen keys
十字螺丝刀
带沉头钻孔的钻孔机
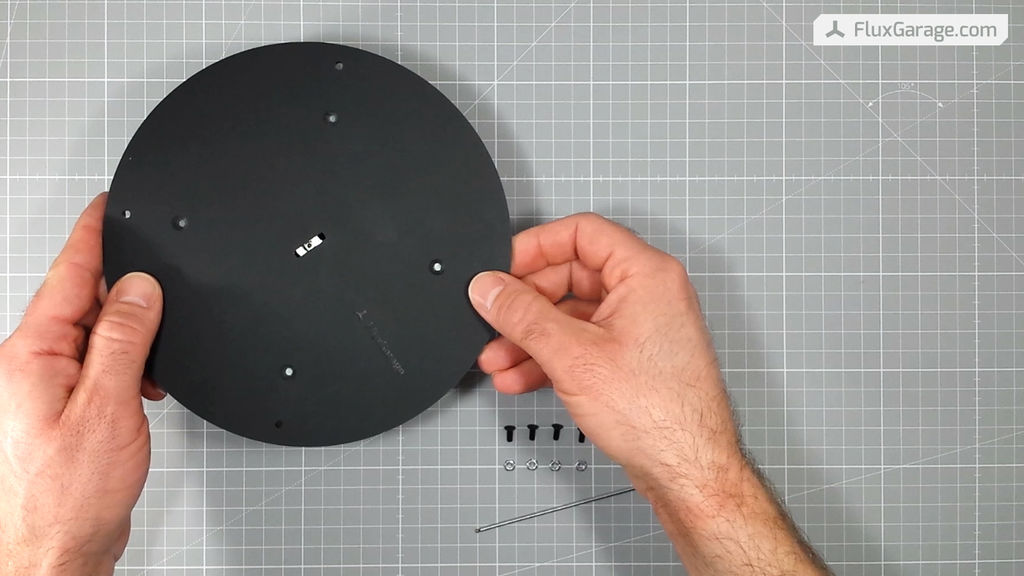
步骤2:准备丙烯酸板
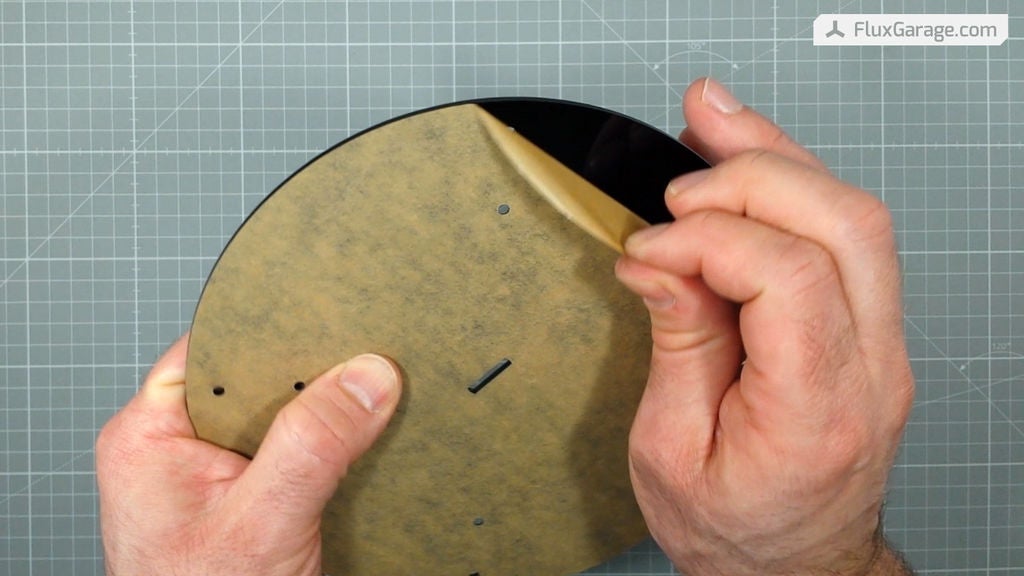
首先,您应该从丙烯酸板上剥下保护膜。有时用吹风机小心地预热箔片会很有帮助。
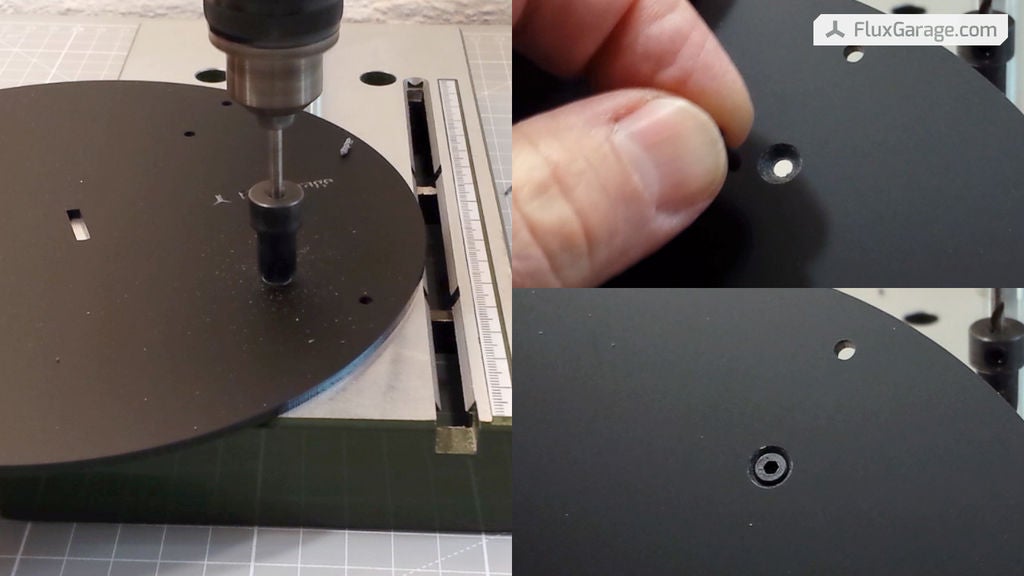
由于我们想使用埋头螺钉固定“上板”,我们需要准备相应的四个内部激光切割孔。
步骤3:在中间板上安装电机

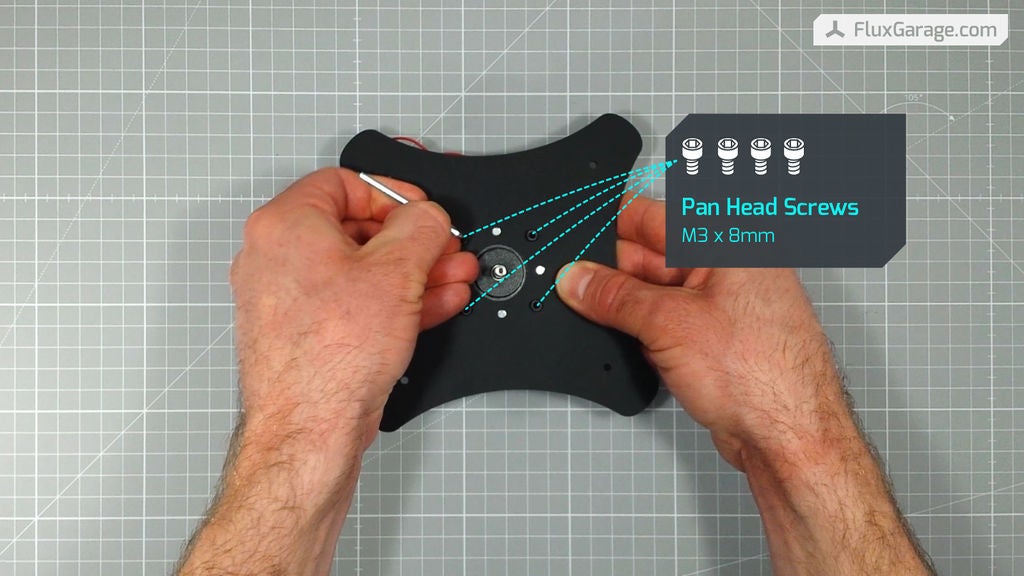
将步进电机穿过中间板。确保电机的孔与板上的正确孔相匹配。使用四个M3x8mm盘头螺钉固定电机。
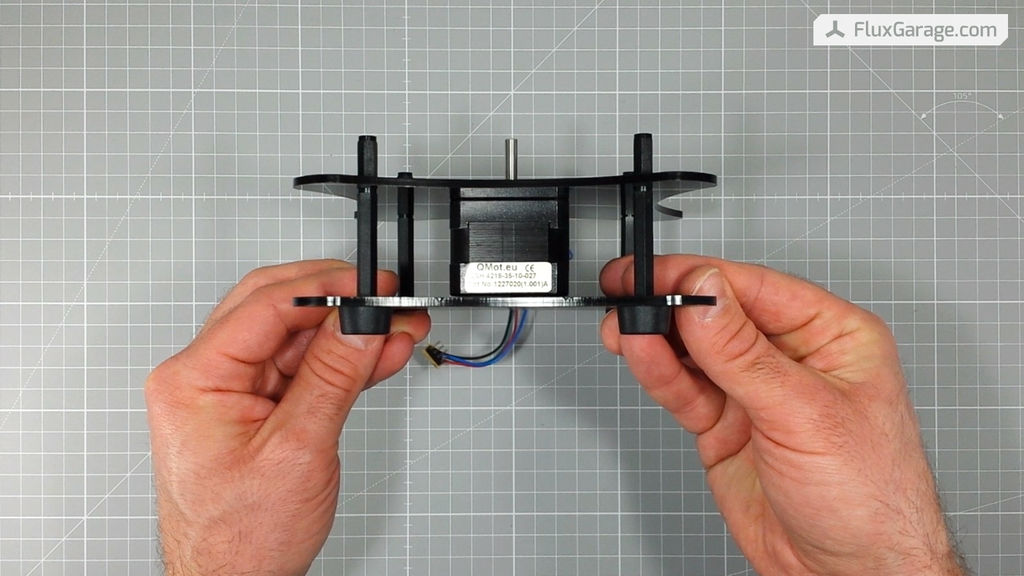
步骤4:添加远程螺栓
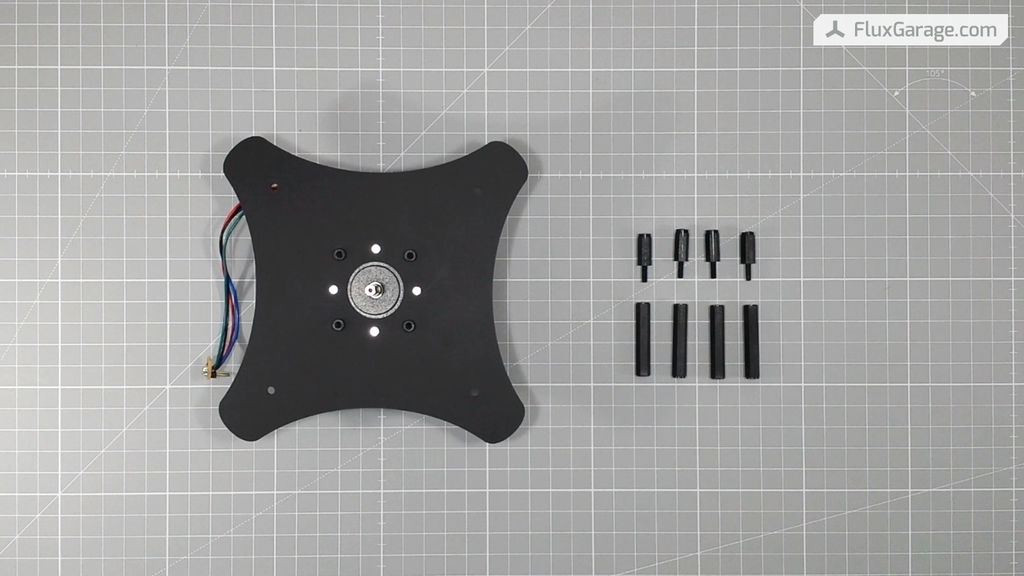
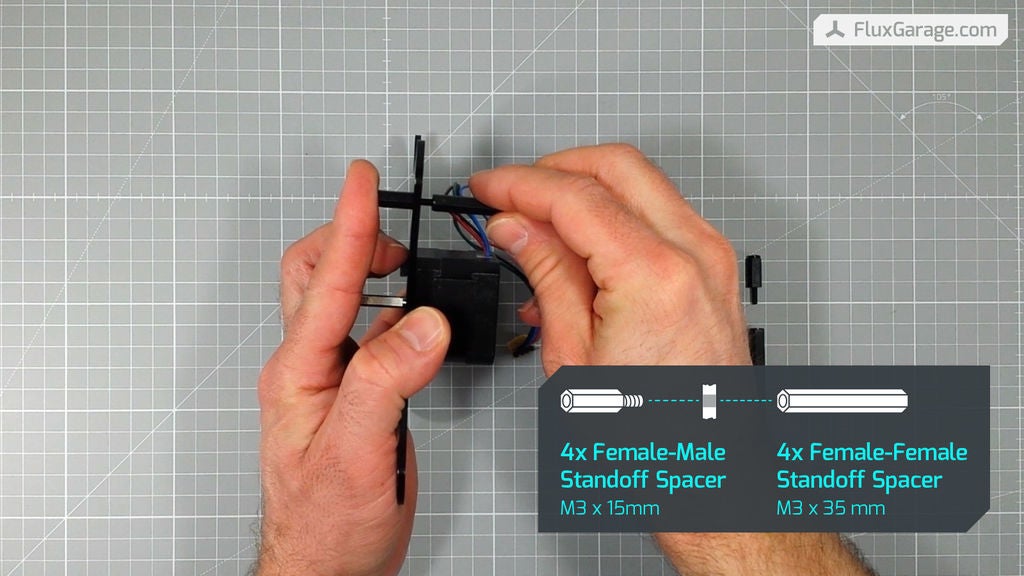
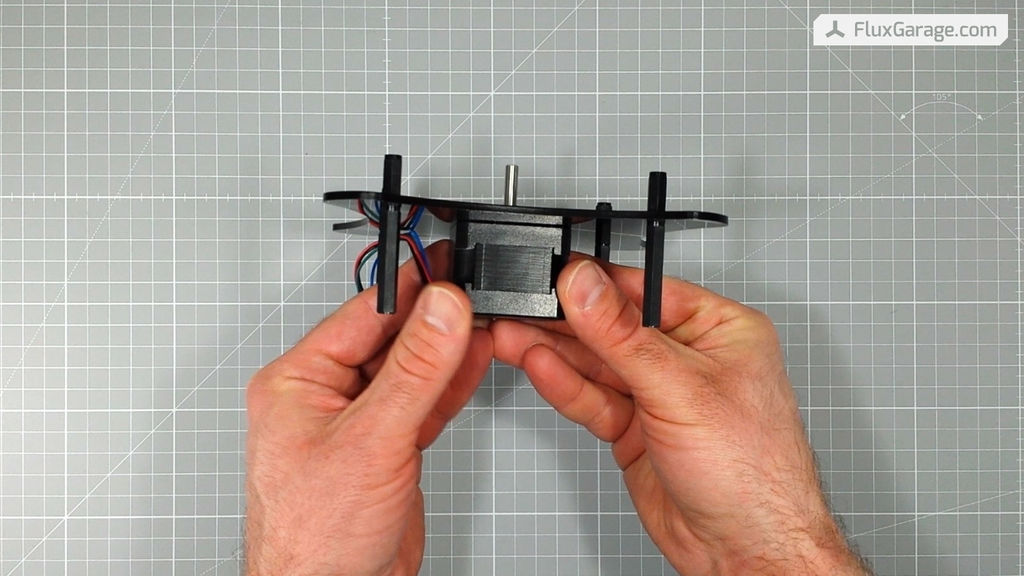
将15毫米母 - 雄垫片穿过盘子。将35毫米母 - 母垫片拧在它们上面。
请注意,“母 - 母垫片”决定步进电机的最大高度,此处为35mm。如果您想使用更高的步进电机,则必须相应地选择更高的支座间隔器或添加额外的母 - 间隔器。例如,您可以添加4个额外的30毫米母 - 男垫片,这样可以使马达高度达到65毫米。
步骤5:添加底板
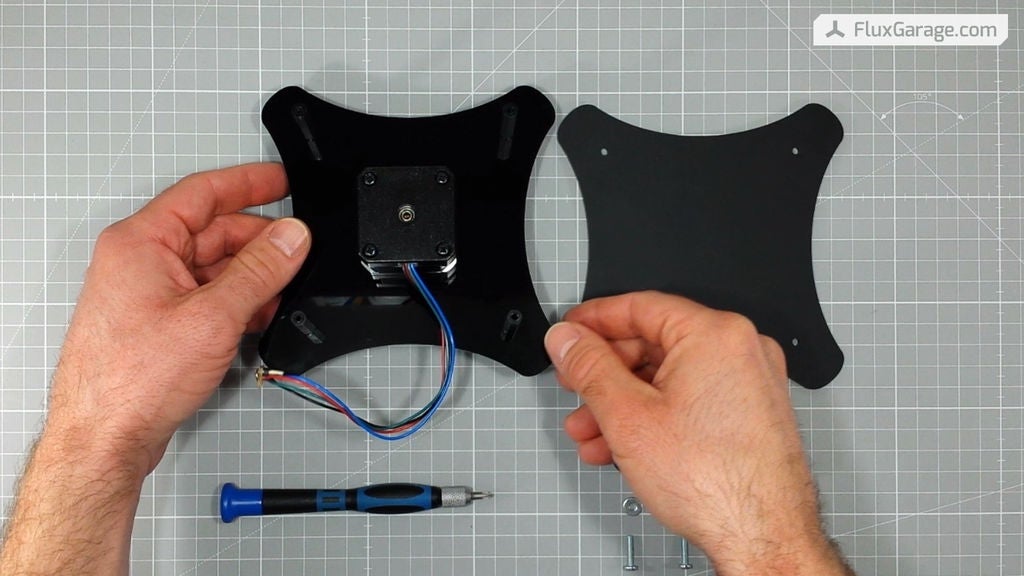
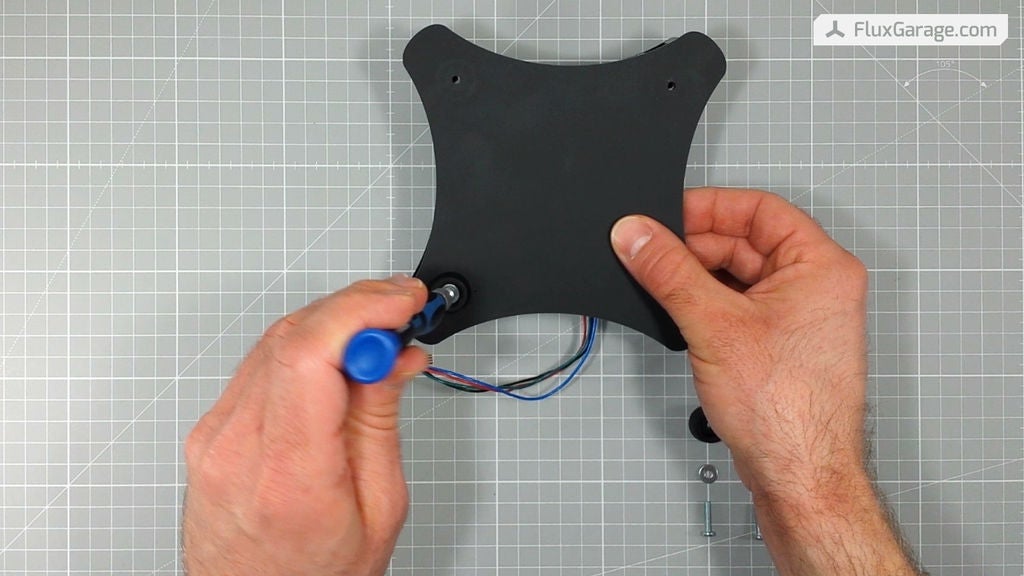
翻转施工并放下底板
现在将垫圈放入橡胶支脚,插入M3x14mm镜头螺钉并将所有部件固定在结构上。
步骤6:安装Lazy Susan轴承
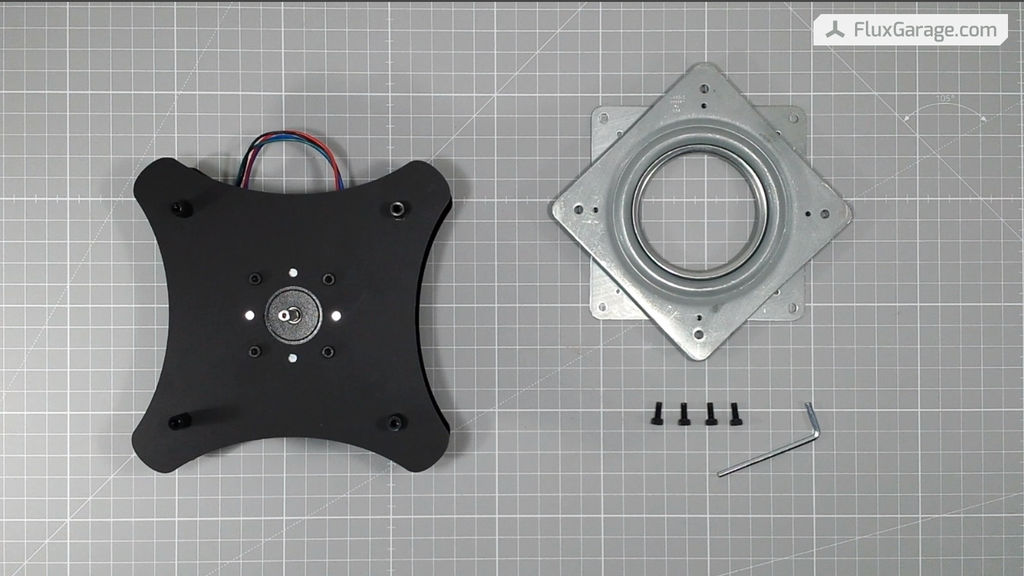
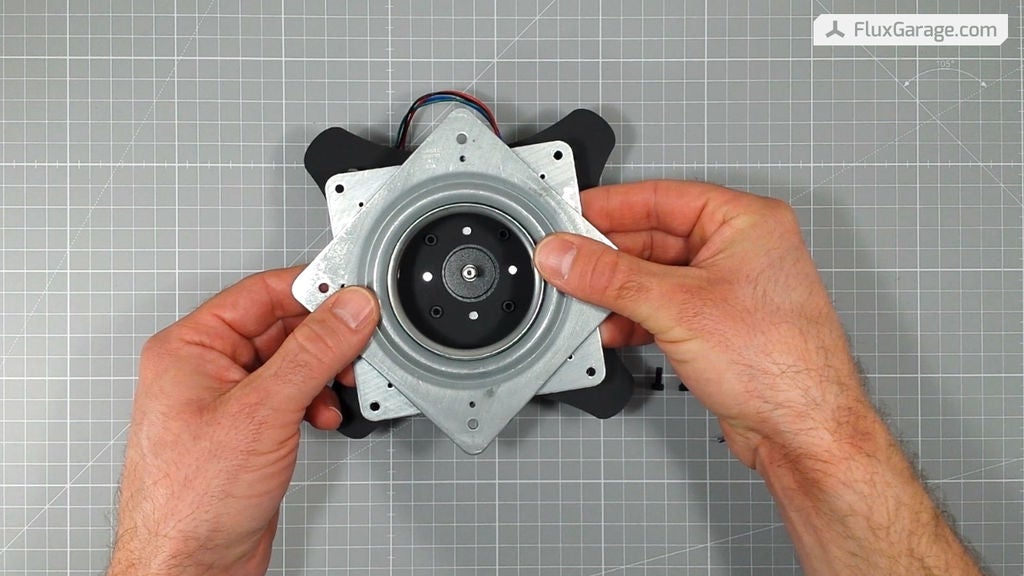

将轴承放在垫片顶部。
确保轴承侧面与90mm孔距正面朝下。使用四个M3x8mm盘头螺钉进行固定。
步骤7:修复Drivedog
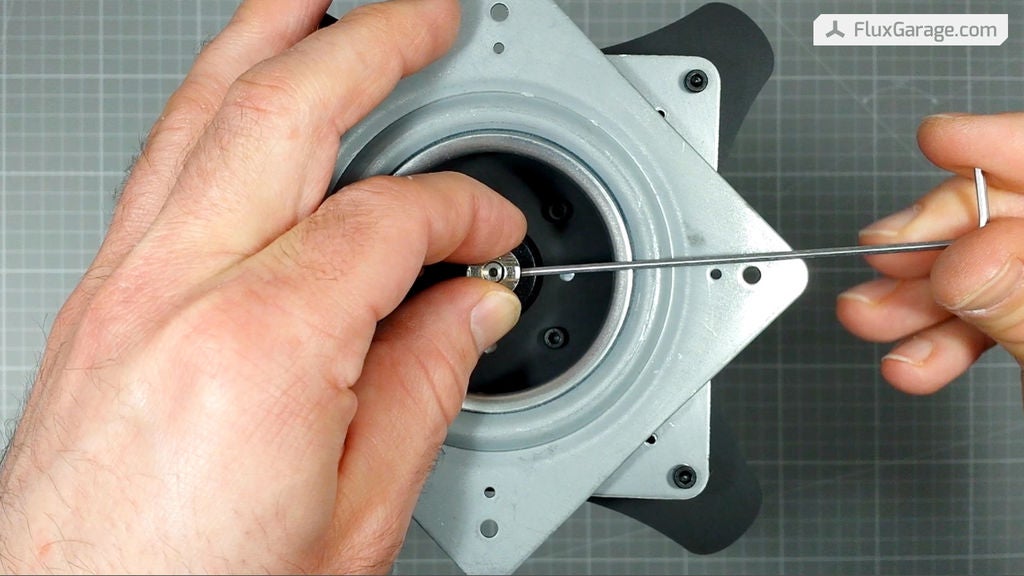
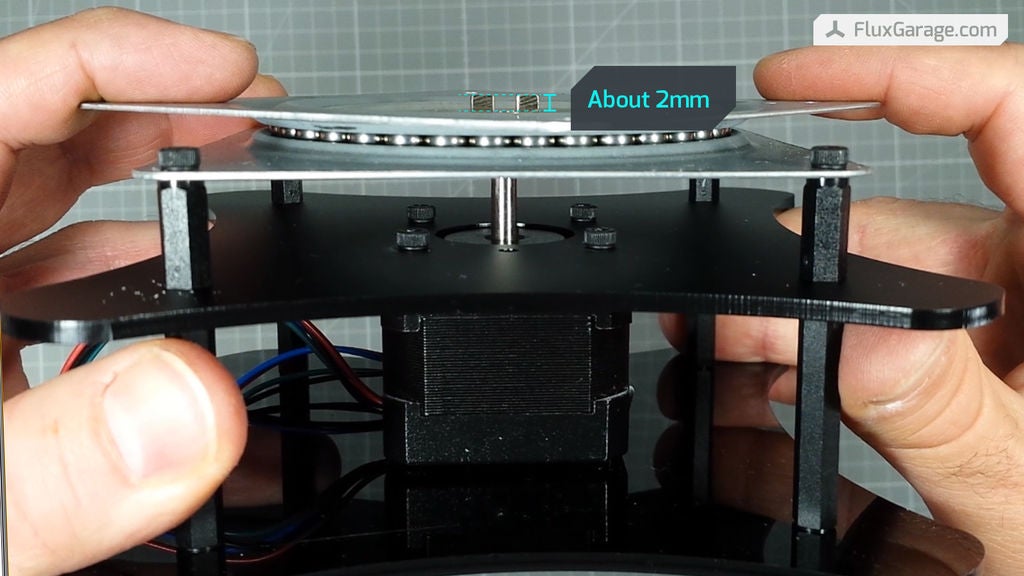
将驱动器放在电机轴上并拧紧螺丝。
驱动器应突出轴承上方约2mm。
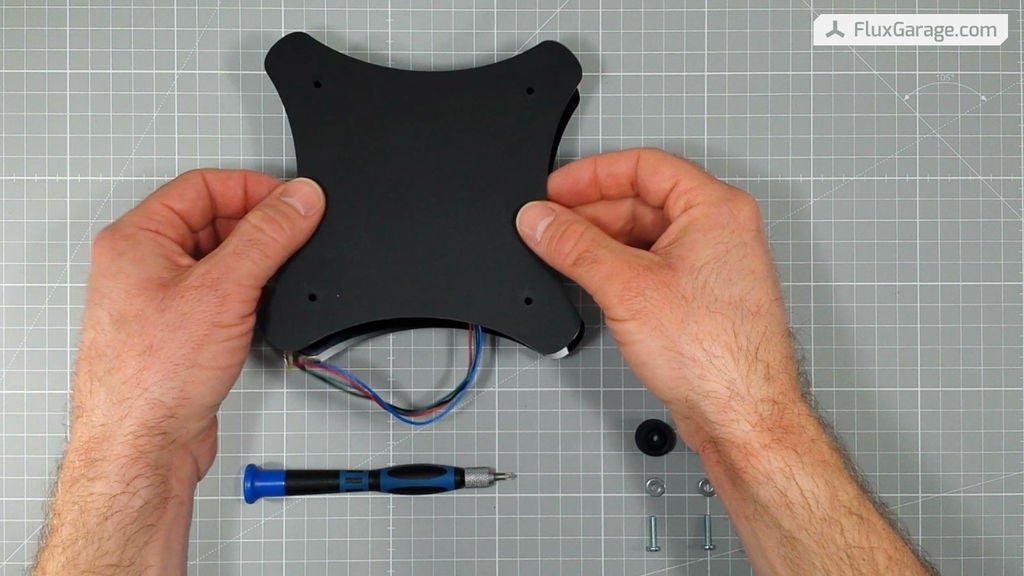
步骤8:添加上板


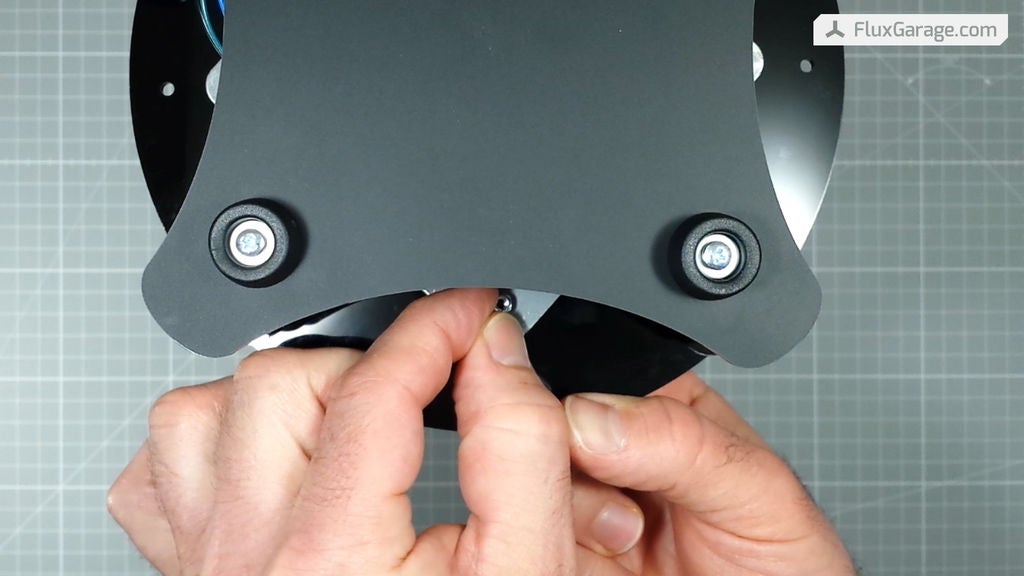
将顶板放在drivedog上。
翻转结构并放置轴承的孔以匹配丙烯酸板中的孔。
插入M3x8mm沉头螺钉(从下面穿过孔)并拧紧螺母。
步骤9:最终转盘
如果你做的一切都正确,你的转盘应该看起来像上面的360°图像序列。当然,这个序列是用第二个FluxGarage转盘和一个白色丙烯酸板制成的:)
步骤10:下一步:构建控制器
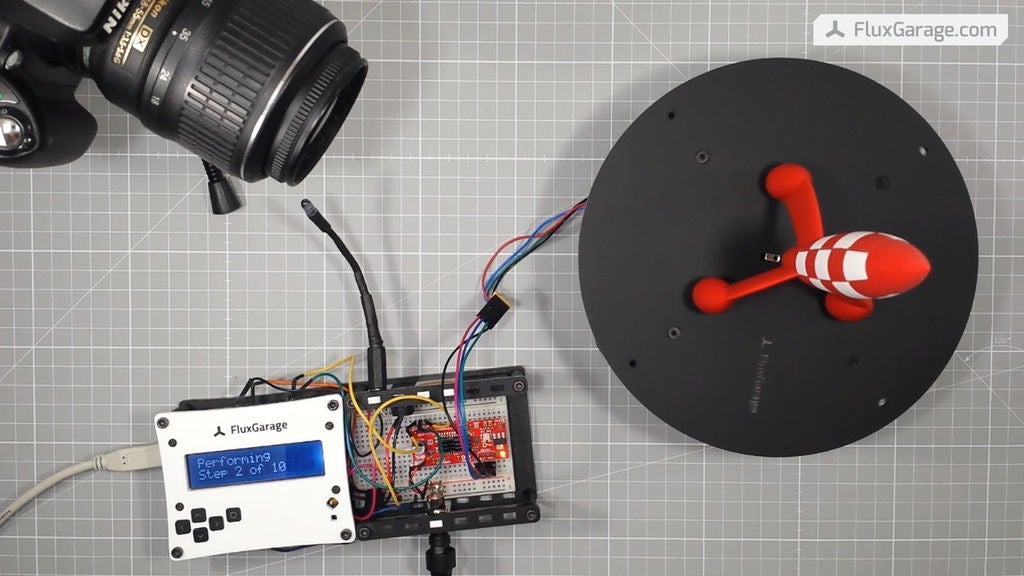
下一步是让转盘生效。我们将创建一个基于arduino + easydriver的控制器来控制步进电机和相机快门。
-
步进电机
+关注
关注
150文章
3112浏览量
147558
发布评论请先 登录
相关推荐
AIGC在视频内容制作中的应用前景
水位自动识别摄像机

高效精准,电池自动贴面垫机助力锂电生产 比斯特自动化

射频识别RFID技术在强夯设备转盘识别中的实践与挑战
边缘计算网关助力自动洗车机实现远程状态监测与即时报警


如何用Arduino制作一个简易自动喂鱼器
应用单片机开发的ST LINK调试器设计制作

51单片机流水灯制作






 工商网监
工商网监
评论