 如何制作电缆凸轮遥控系统
如何制作电缆凸轮遥控系统
第1步:概述





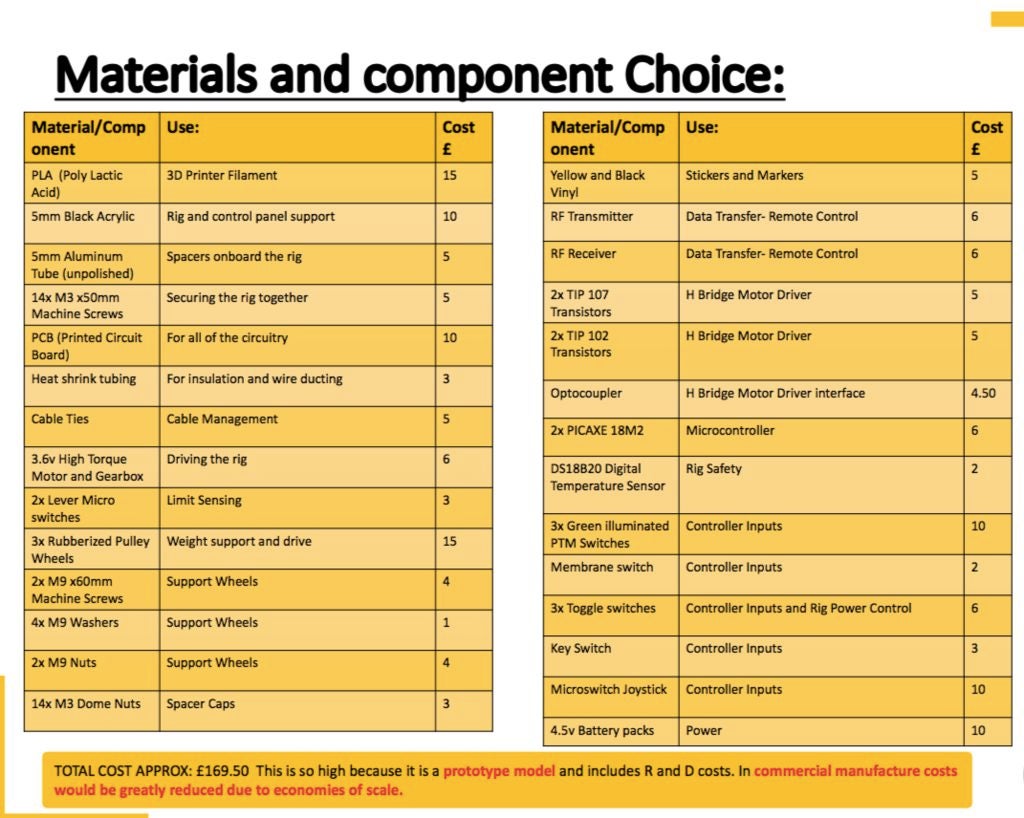
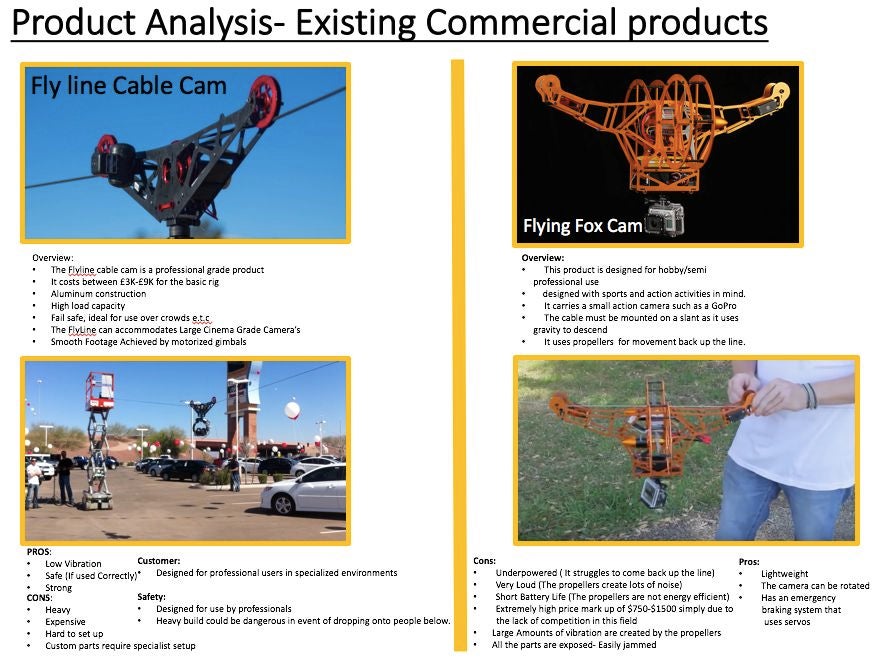
Cable Cam由三个主要部分组成:
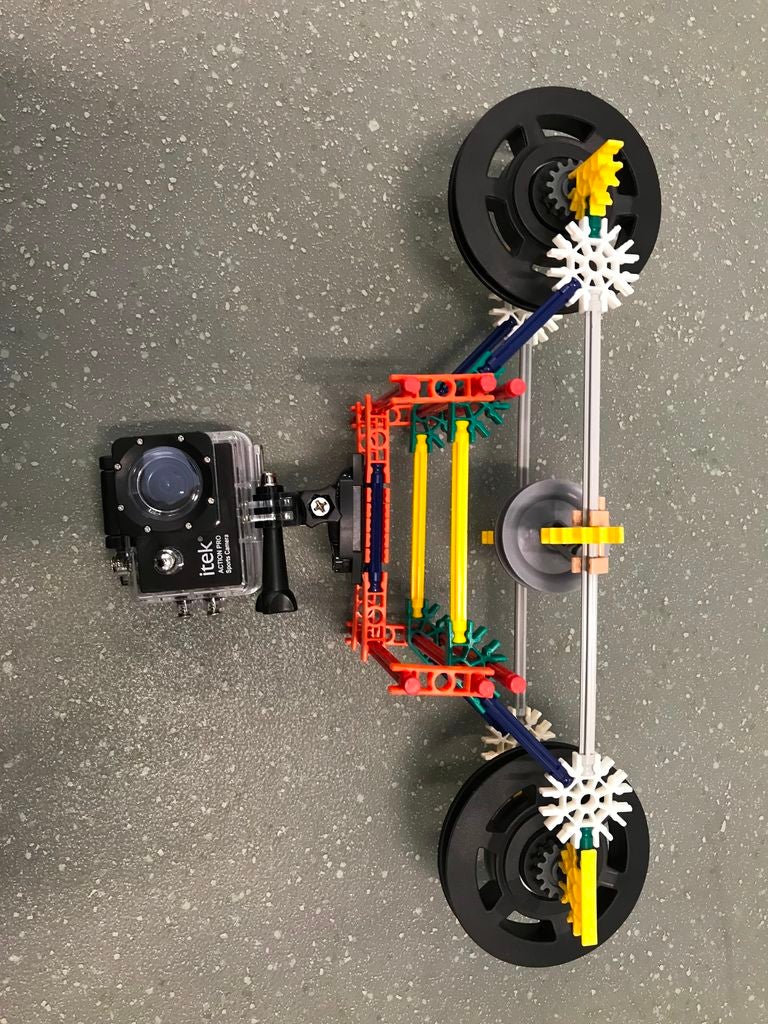
实际装备(携带摄像机和驱动器的部分沿着电缆)
电缆(支持钻机并允许它在任何两个相当坚固的点之间运行)
第2步:工作原理
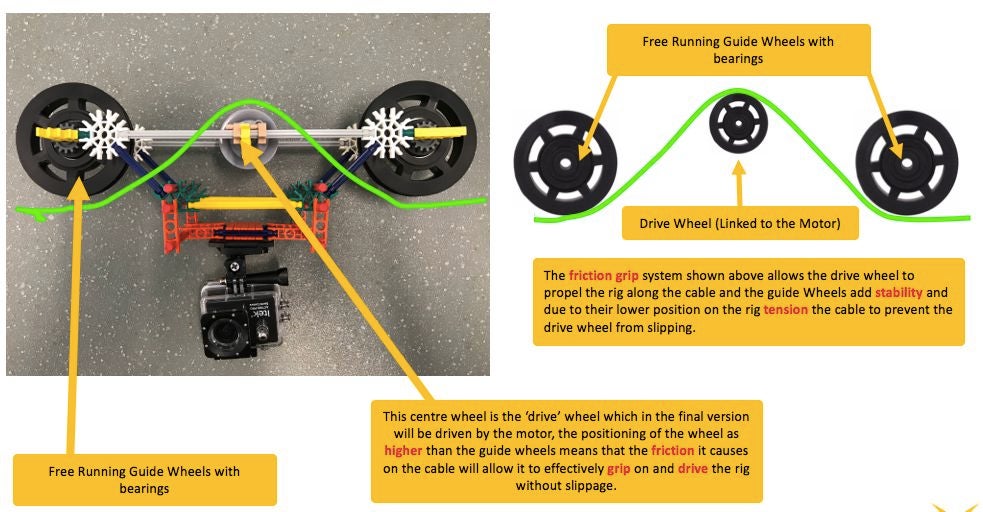



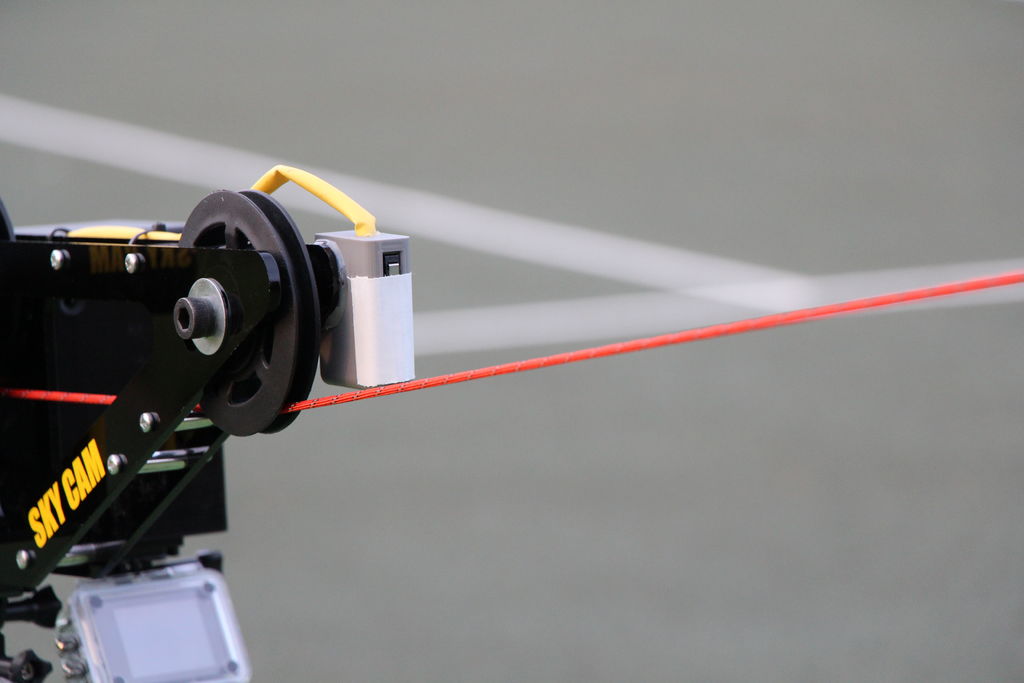
正如您在上面的图片中看到的那样,Rig依赖于摩擦以便从wh传输驱动器鳗鱼放在电缆上(绿线)。可能难以实现正确的摩擦平衡,因此我使用以下方法来获得最佳的张力和摩擦力。
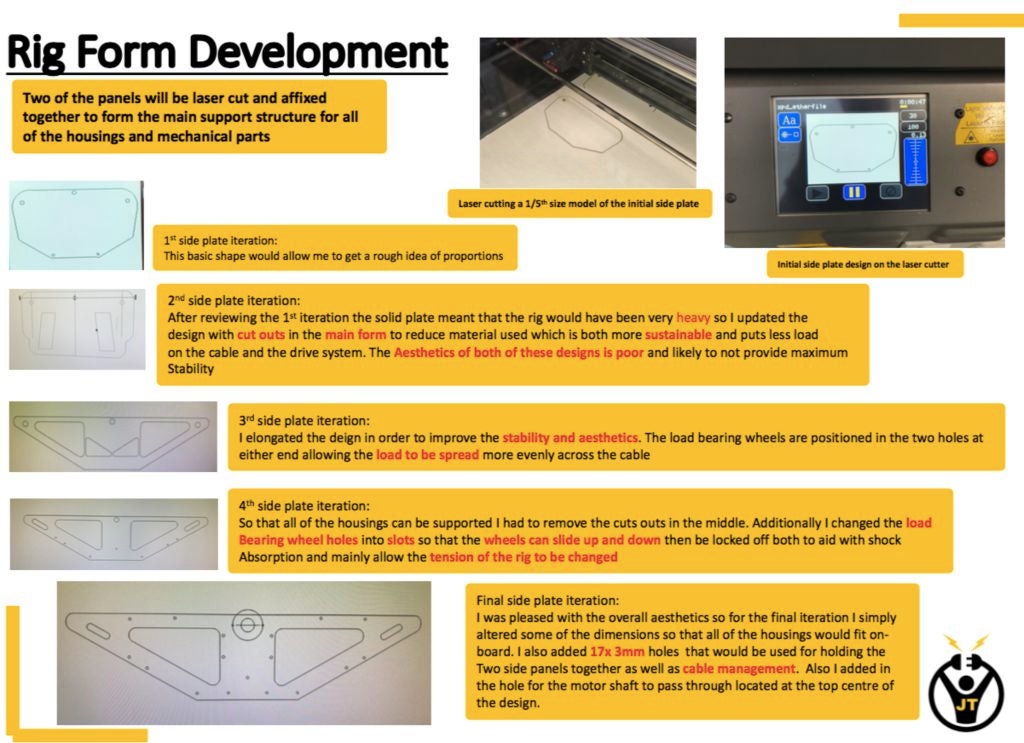
主要是车轮的布置迫使电缆向下并越过驱动轮,如图所示上图。这是一个非常好的方法,因为它允许两个外轮将钻机的全部负载带到电缆上(意味着您可以将相当重的摄像机或设备安装到钻机上)确保 READ STEP 7 在尝试使用您自己的系统之前!
然而,三轮安排在很大程度上依赖于电缆处于非常高张力,这是理想的并且使用我的索具方法很容易实现,但是它可能并不总是处于最佳张力。为了解决这个问题,承重轮都位于槽系统中,允许它们上下移动到改变钻机中的张力。它还可以作为一个基本的安全系统 - 如果电缆由于任何原因变得过度张紧,那么外部装配轮会向上滑动以降低钻机和驱动轮的压力,从而有望防止损坏电机。
因此,当您使用三轮安排设计自己的钻机时,这是确保驱动到电缆上的绝佳方法。
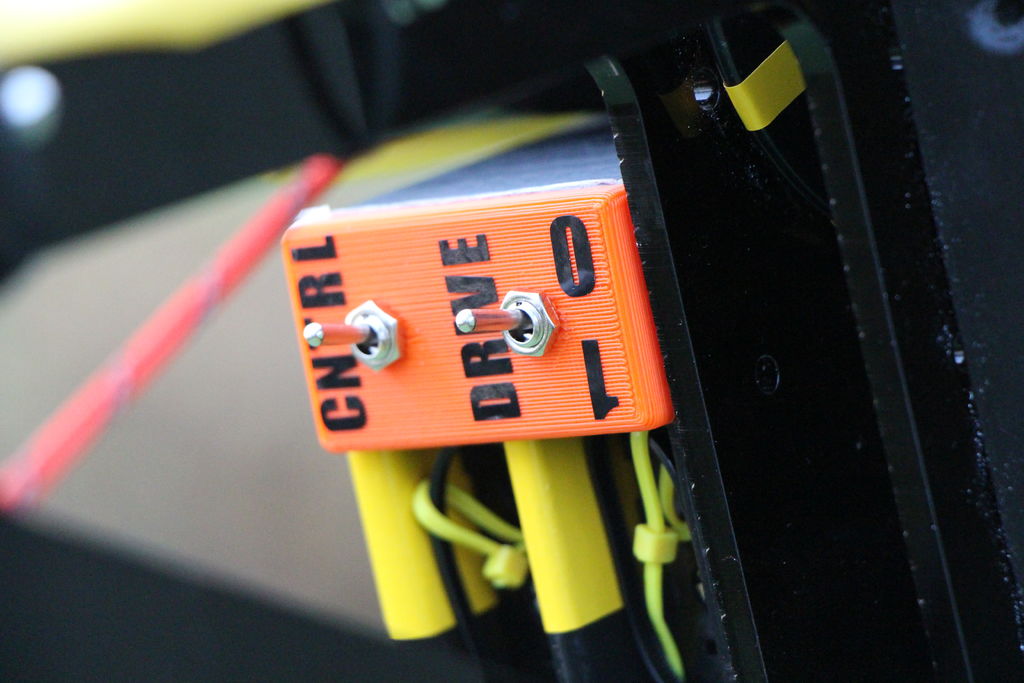
步骤3:控制器

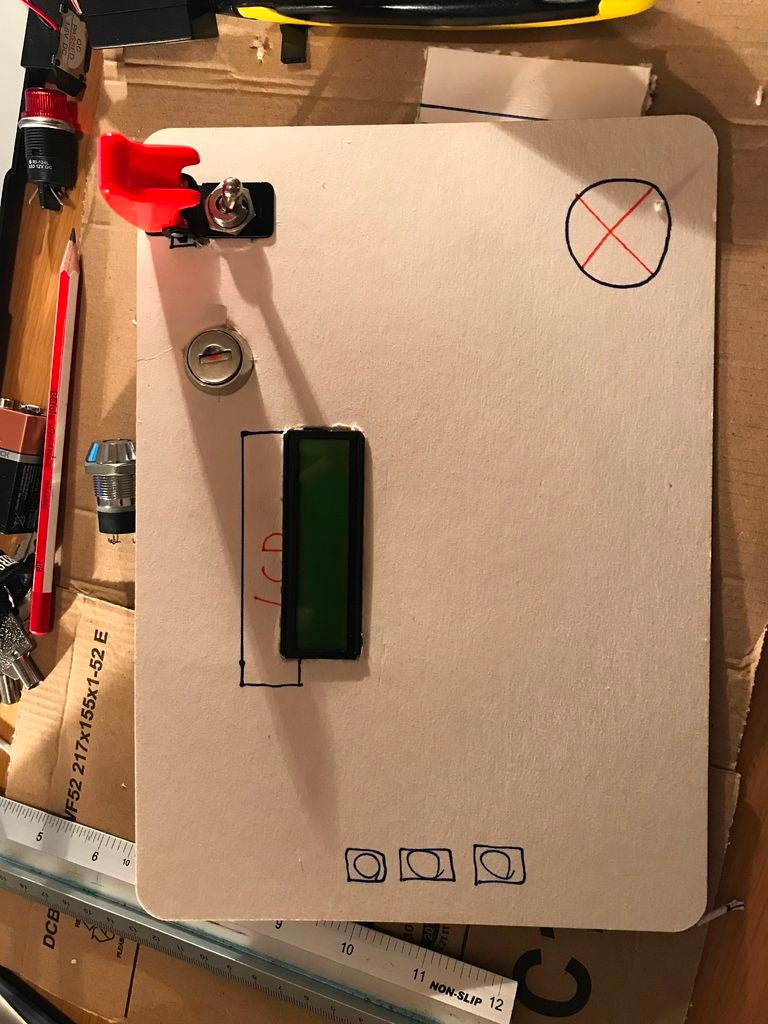
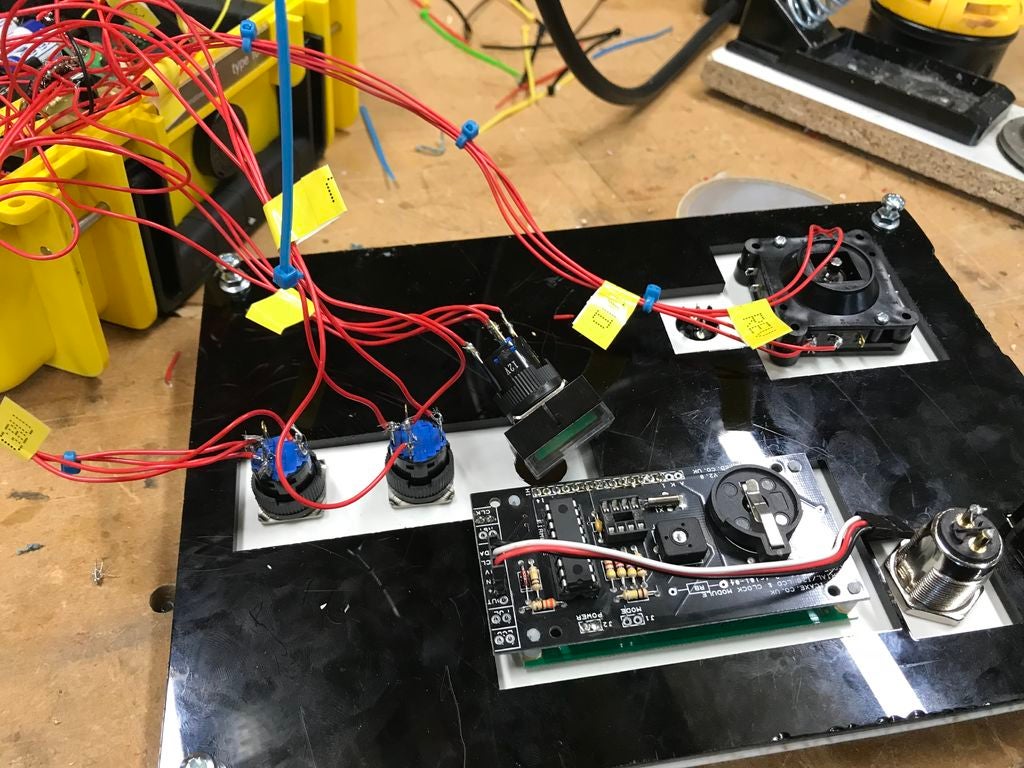
要制作控制器,您需要通过使用一些数字卡尺进行测量并在CAD(Fusion 360)中制作矩形来开始,然后我将其激光切割成卡片。这样您就可以正确测量测量结果,并在切入最终材料之前让您定位所有组件。
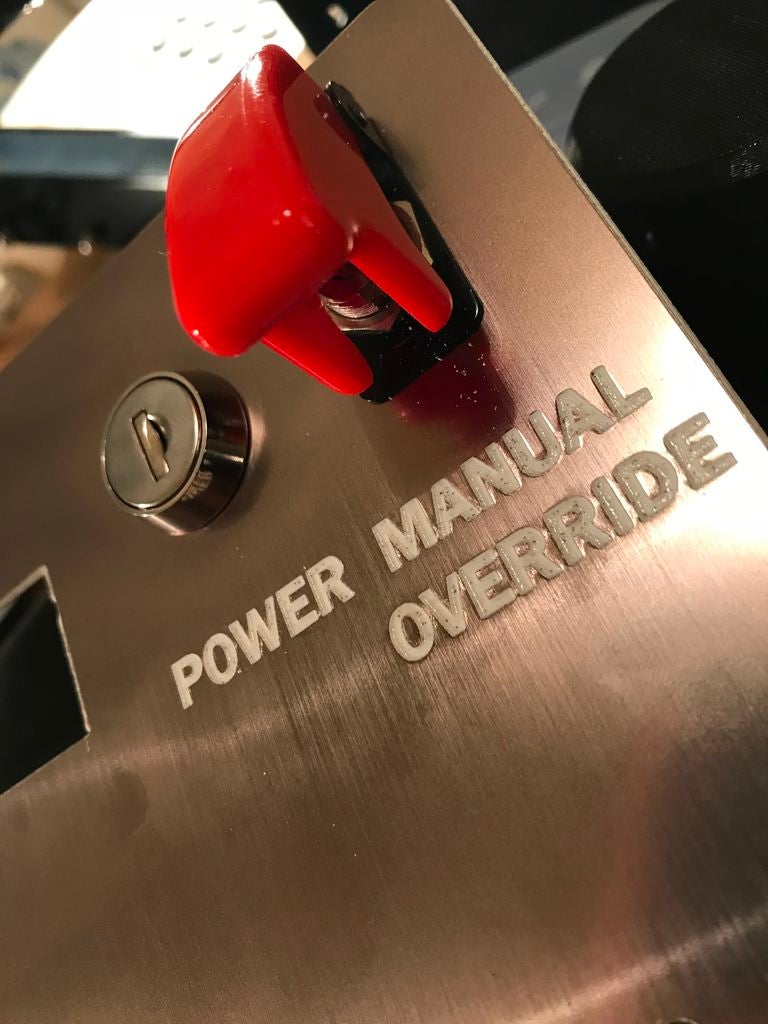
对于我的控制面板,我将其剪切为 3mm Dual层激光塑料这就是我将雕刻变成白色的方式。这款3毫米塑料的一个问题是它非常灵活。为了抵消这一点,我使用了 5mm黑色丙烯酸,在支撑面板背面有大切口,如上图所示。然后在四个角中的每个角上钻一个3毫米直径的孔并将机器螺钉穿过两个塑料并用 M3圆顶螺母固定 b》在面板的顶部,很好地将它固定在一起。它还增加了控制面板的坚固美感。
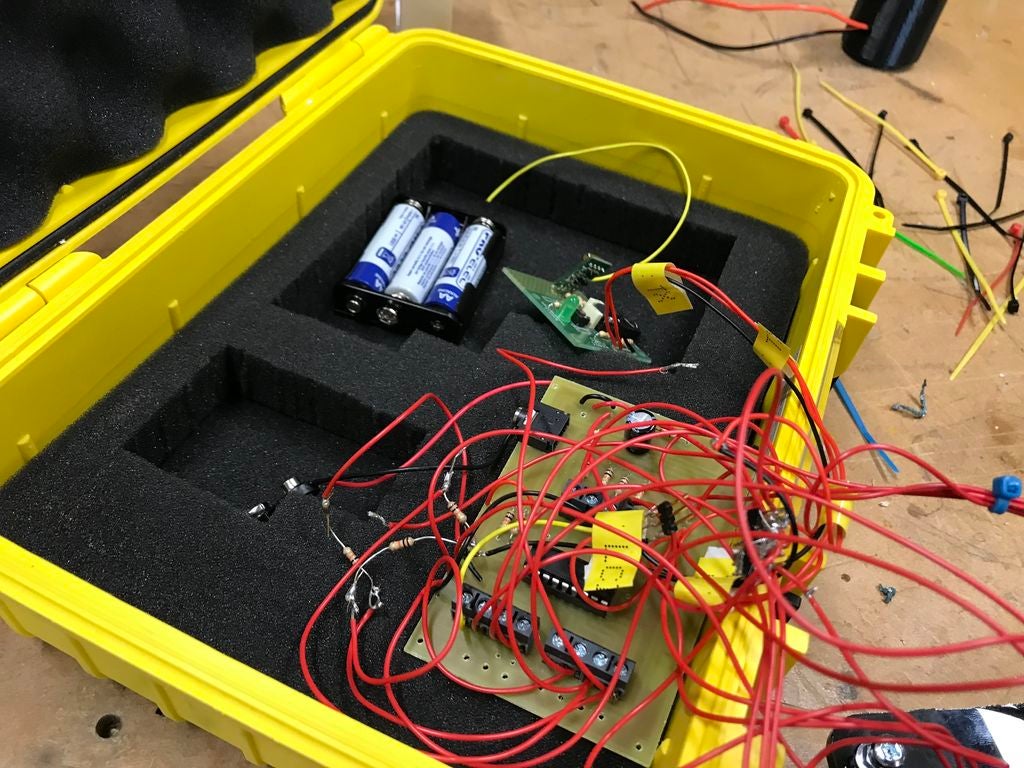
使用与上述类似的航空箱的一个优点是您的面板可以是摩擦配合。只需将它紧紧地推入即可,但是如果您因任何原因需要将其移除,您仍然可以稍微用力点击它!
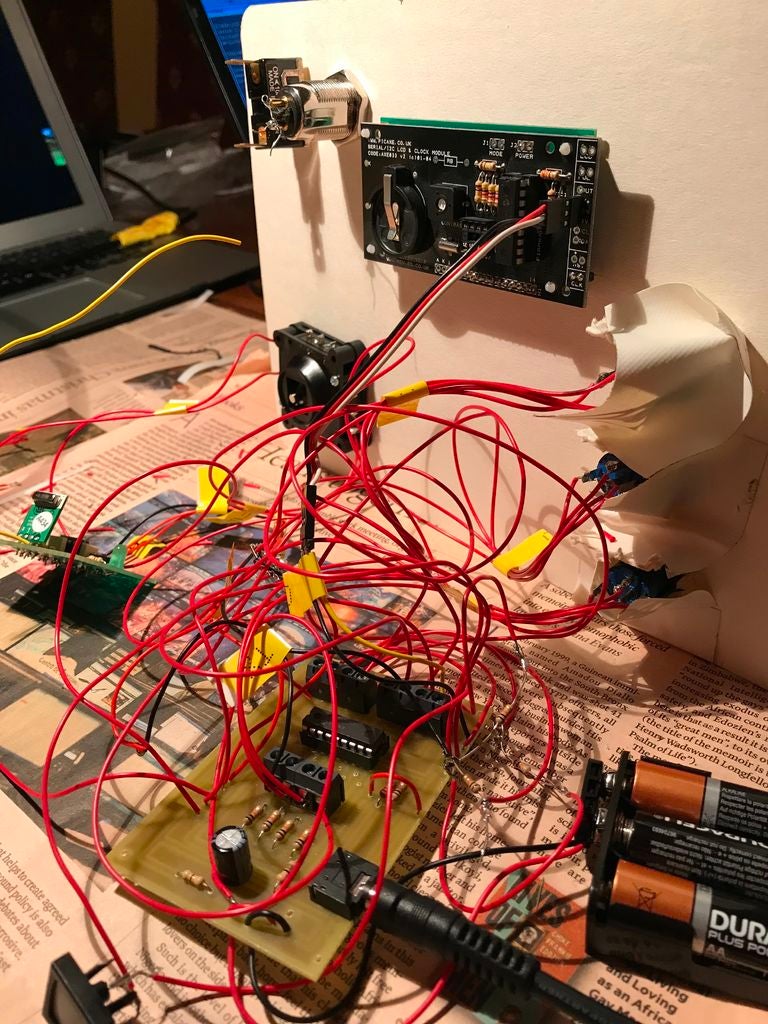
步骤4:电子系统

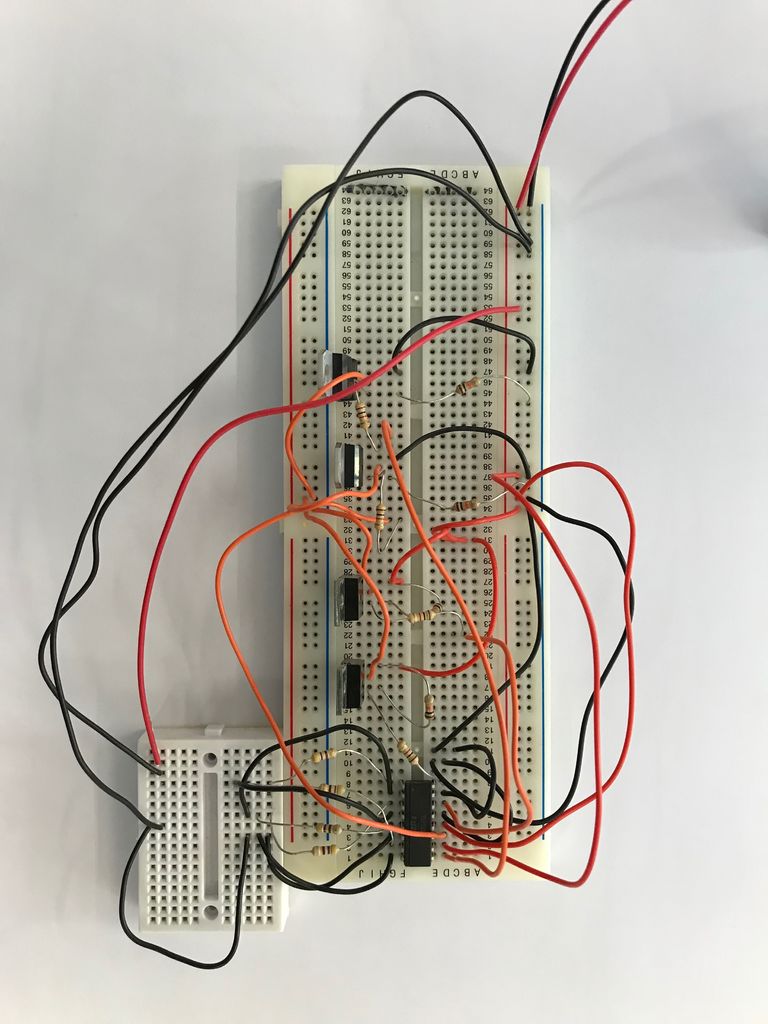

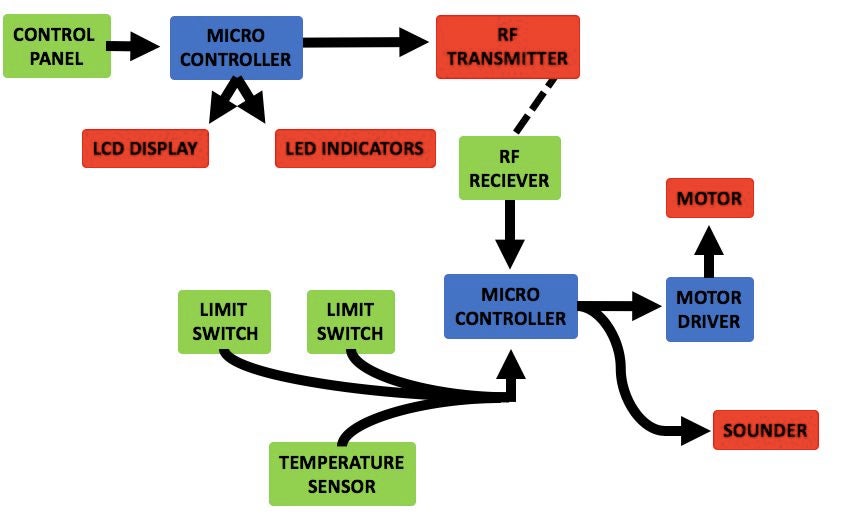
此项目中有两个主要系统,概述如下。您还可以了解它们如何与上述流程图集成。
钻机方:
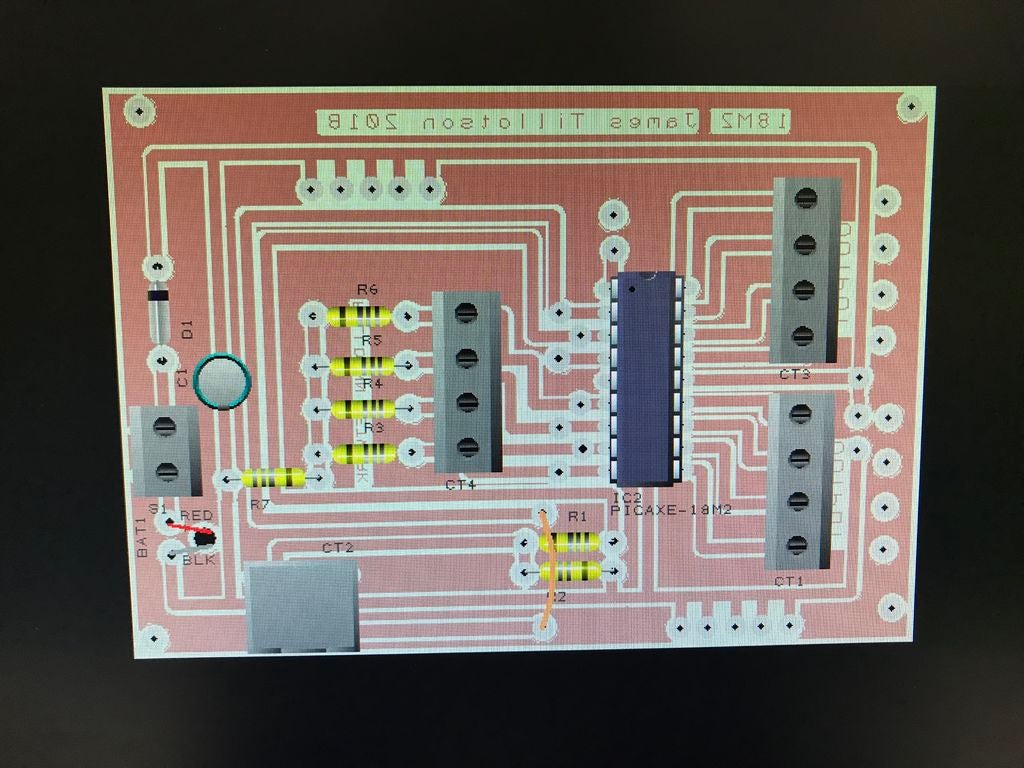
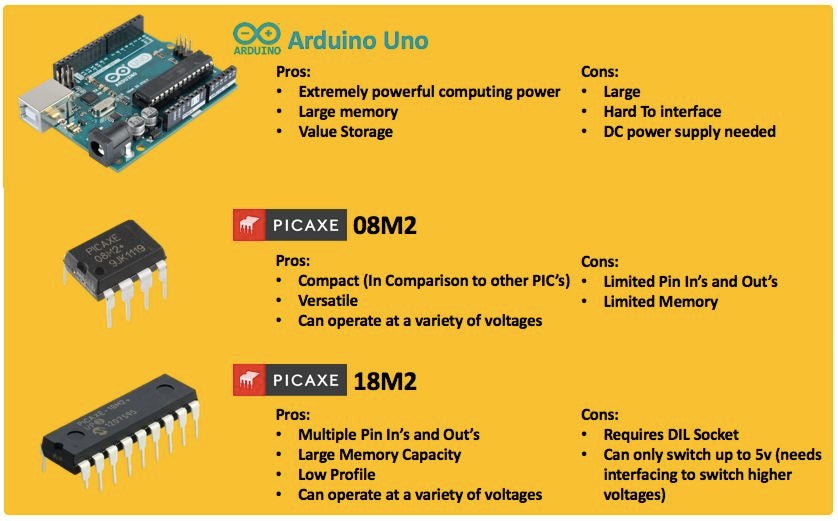
微控制器板
控制器端:
控制PCB
射频发射器
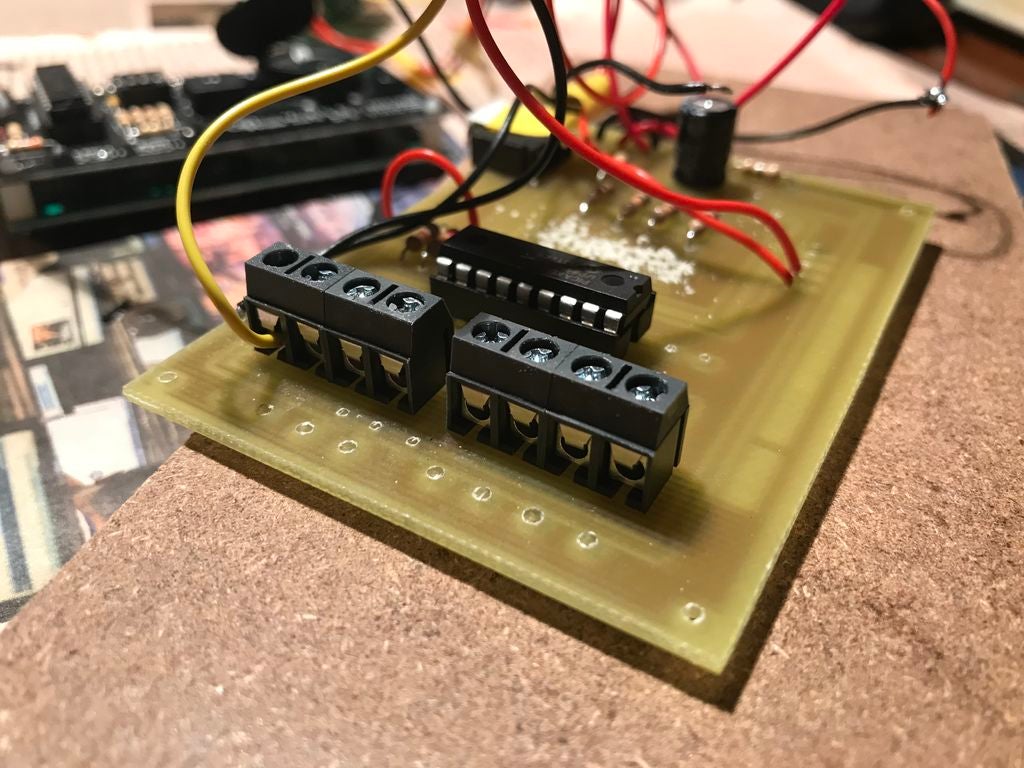
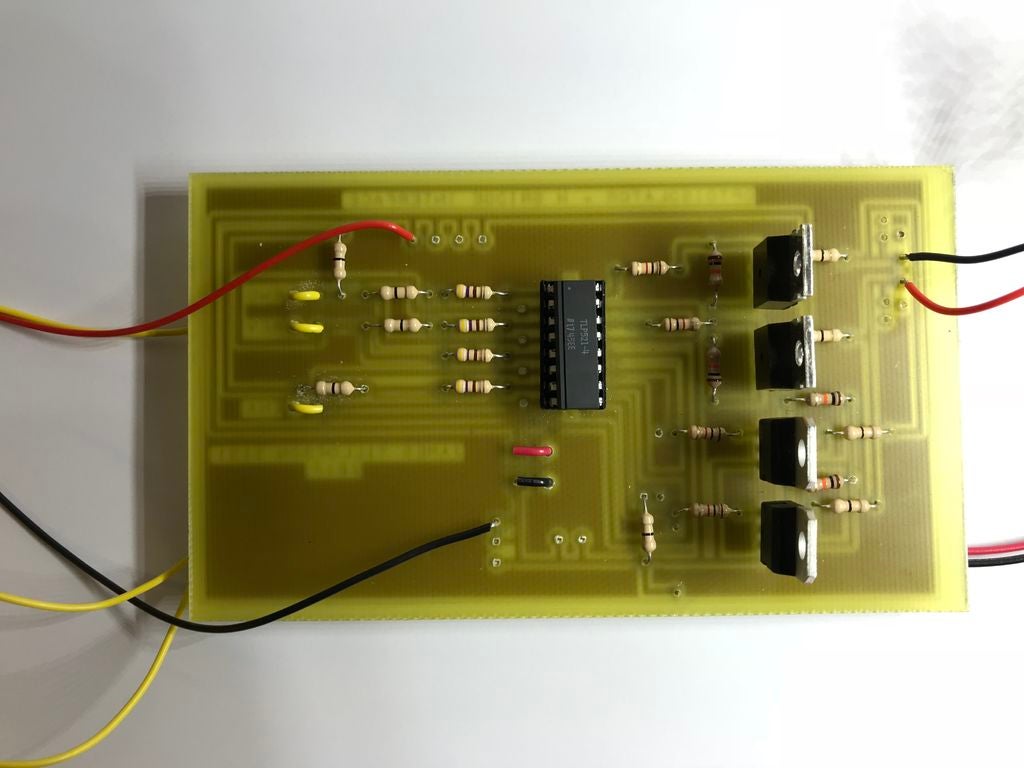
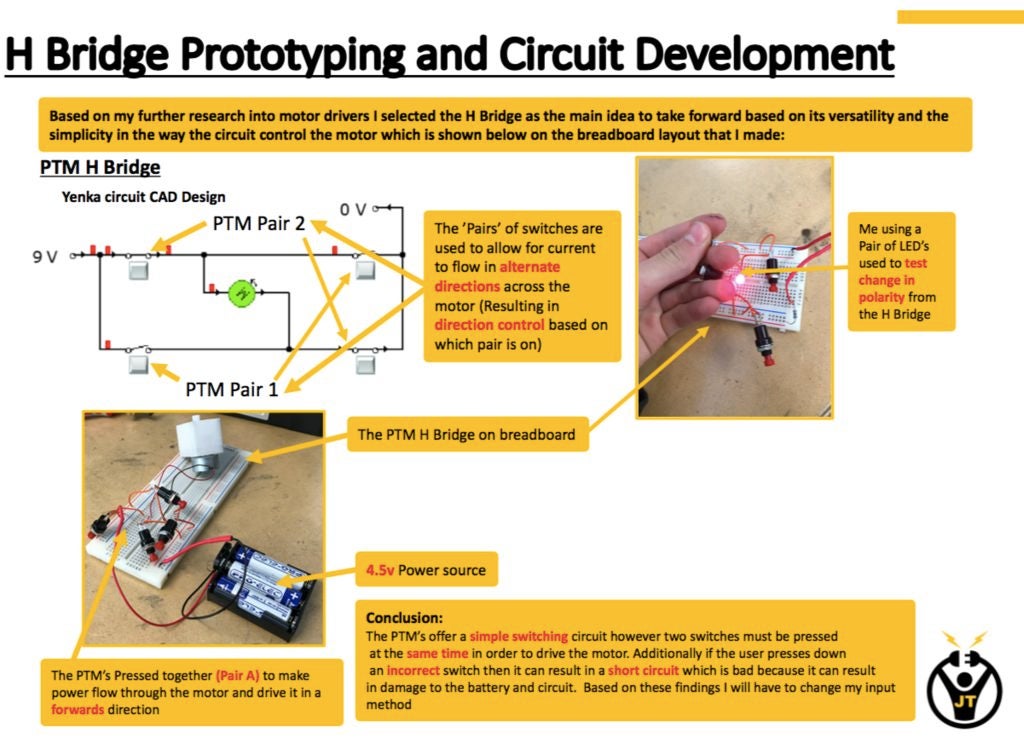
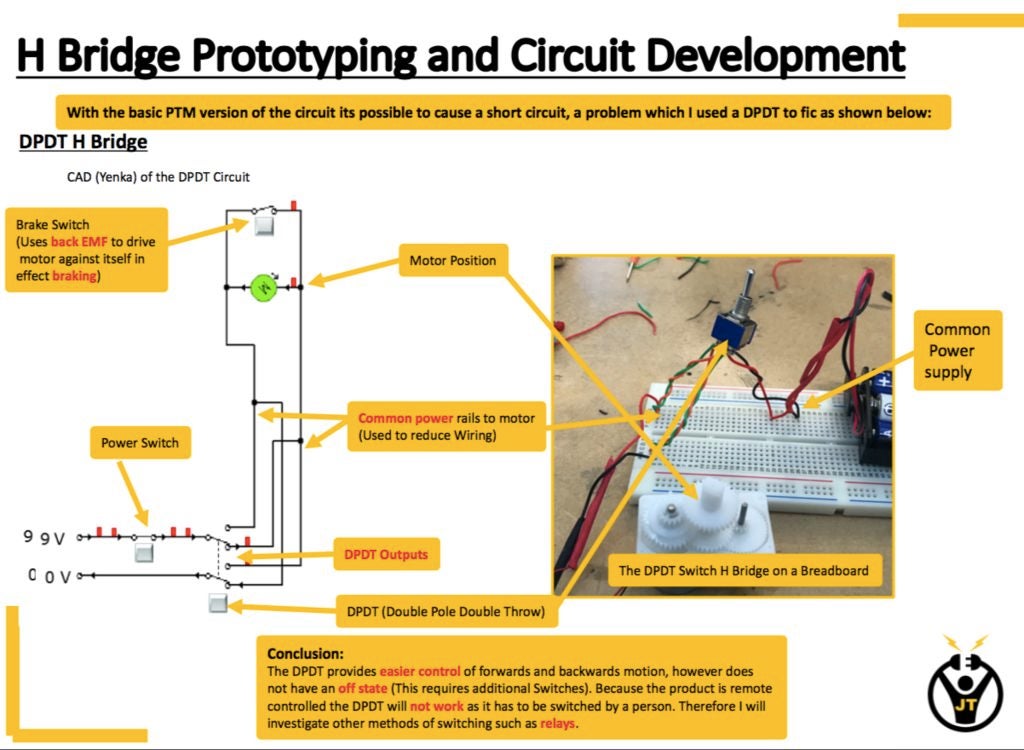
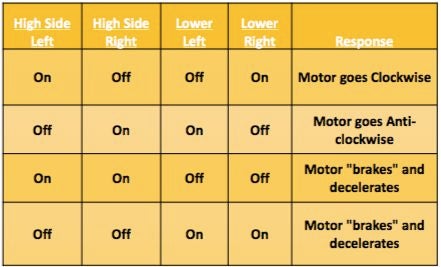
电机驱动器是基于晶体管的H桥,通过接通四个晶体管的交替对工作允许电机运行:前进,后退,并通过将反电动势输入电机来休息。我没有使用继电器,而是使用光电耦合器(16引脚4门)将PICAXE微控制器与晶体管连接,确保微控制器不会被电机驱动器的高电流损坏。
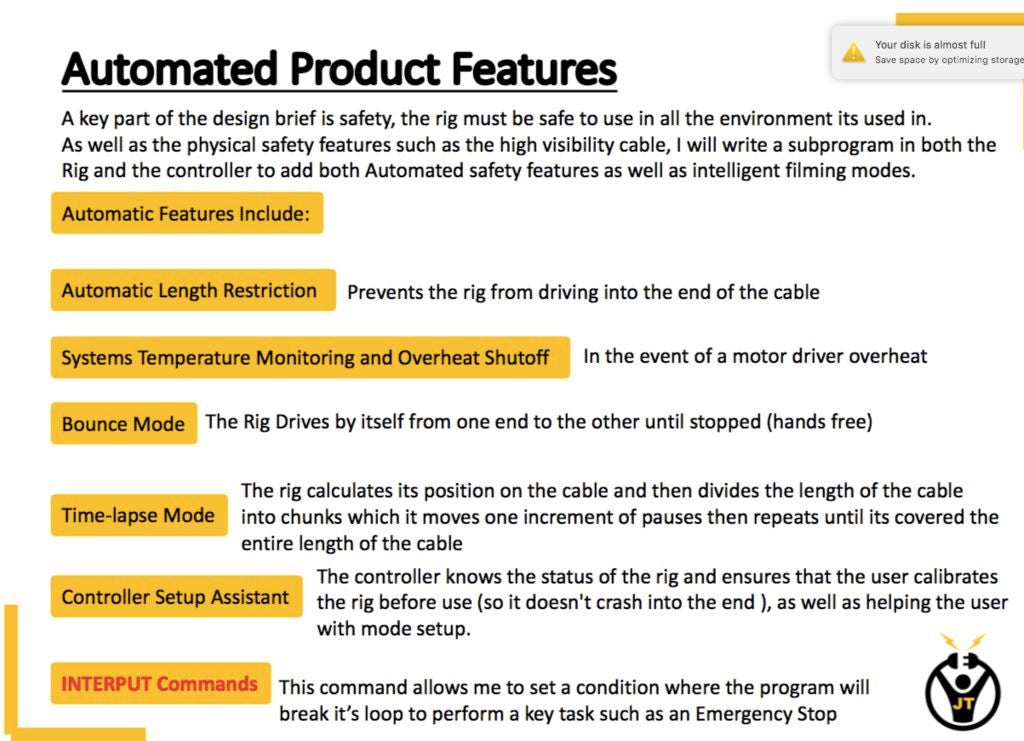
在每端的钻机上都有一个微动开关,允许钻机始终知道其沿着电缆的位置,允许自主功能,并且还可以阻止钻机撞到末端。这条线。它可以确定它的位置,因为在启动过程中它会运行电缆的最大长度并记录结束点和起点。然后它可以根据沿着电缆移动的时间随时计算其位置
步骤5:驱动系统
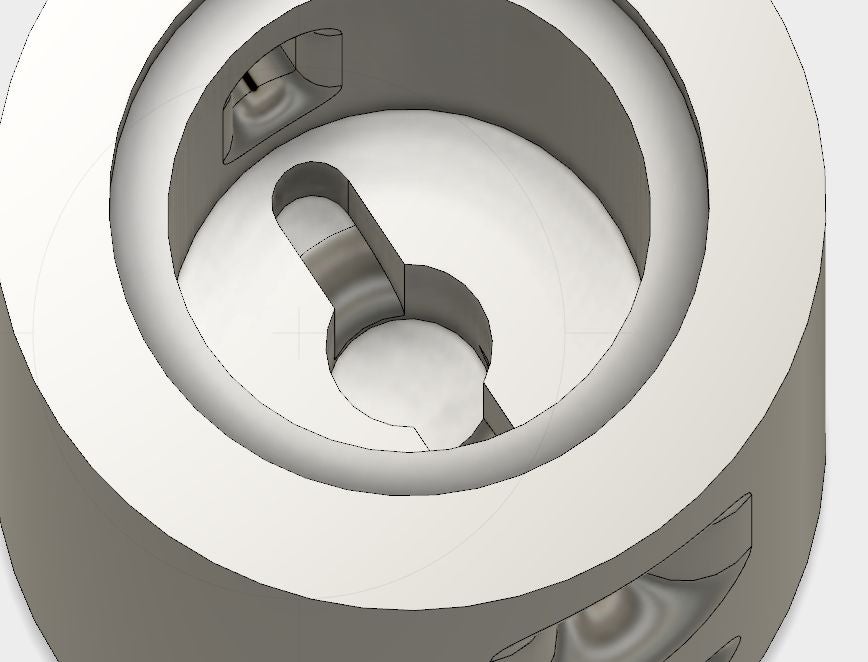
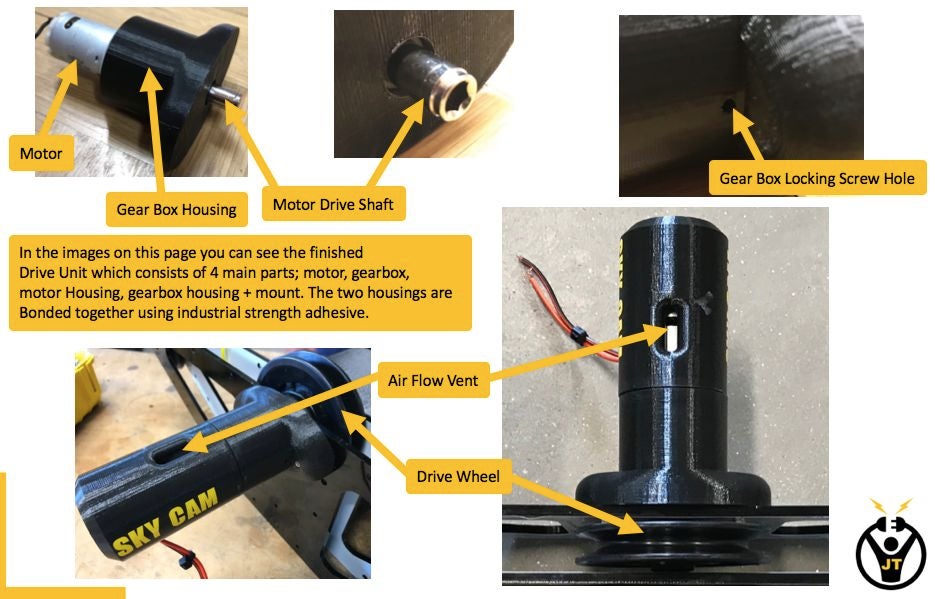
为了能够以高张力和合理的速度驾驶钻机,您需要使用高扭矩减速电机。我使用了电动螺丝刀电机并为其设计了一个外壳,用于 CAD(Autodesk Fusion 360)非常适合我。在上面你可以看到我包括电缆管道和通风口,以及安装孔。
提示
测量需要非常精确,否则您可能会遇到齿轮箱故障。 (我在最初的测试阶段做过,外壳内部有一些空间,导致变速箱松动而失效,所以小心!)
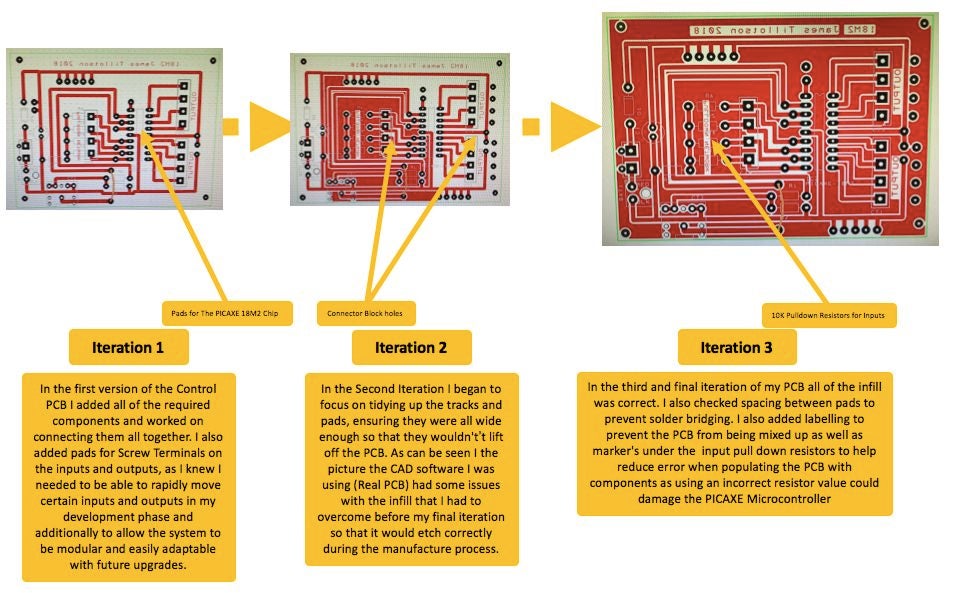
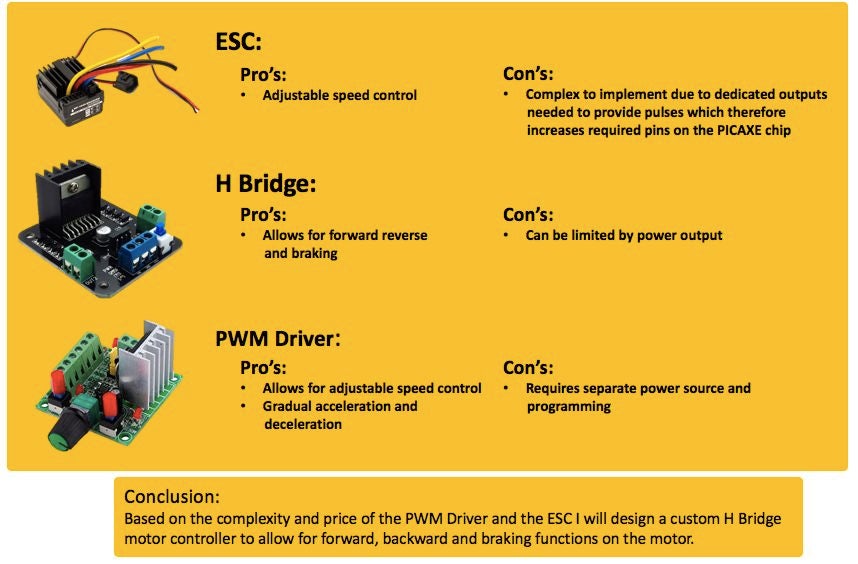
步骤6:电机驱动器
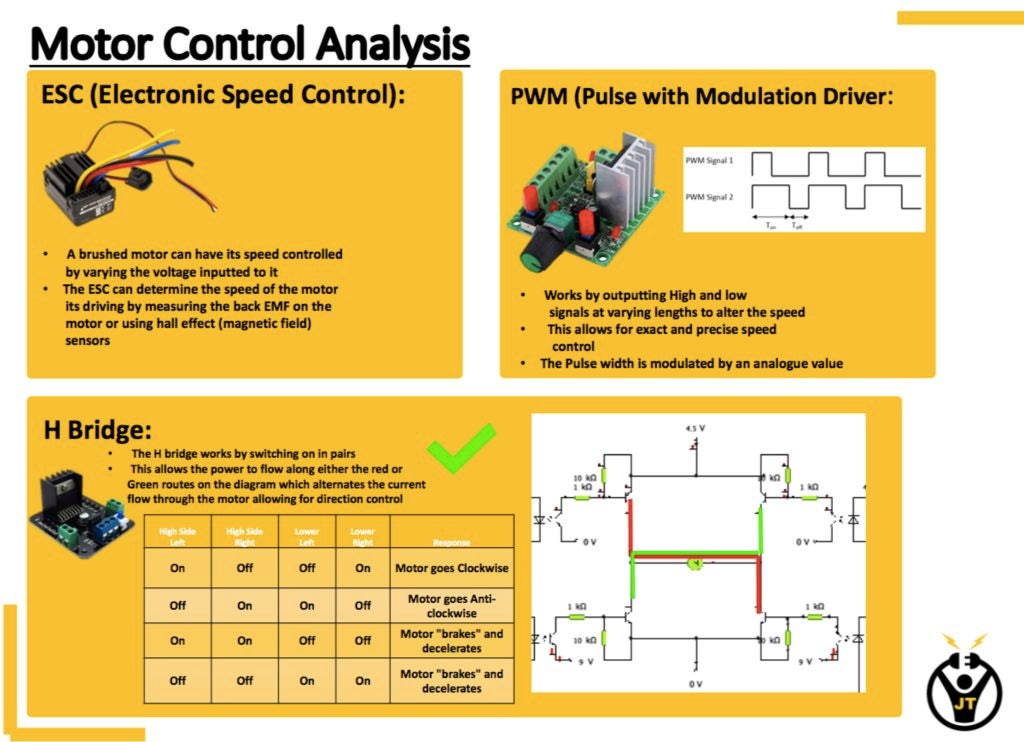
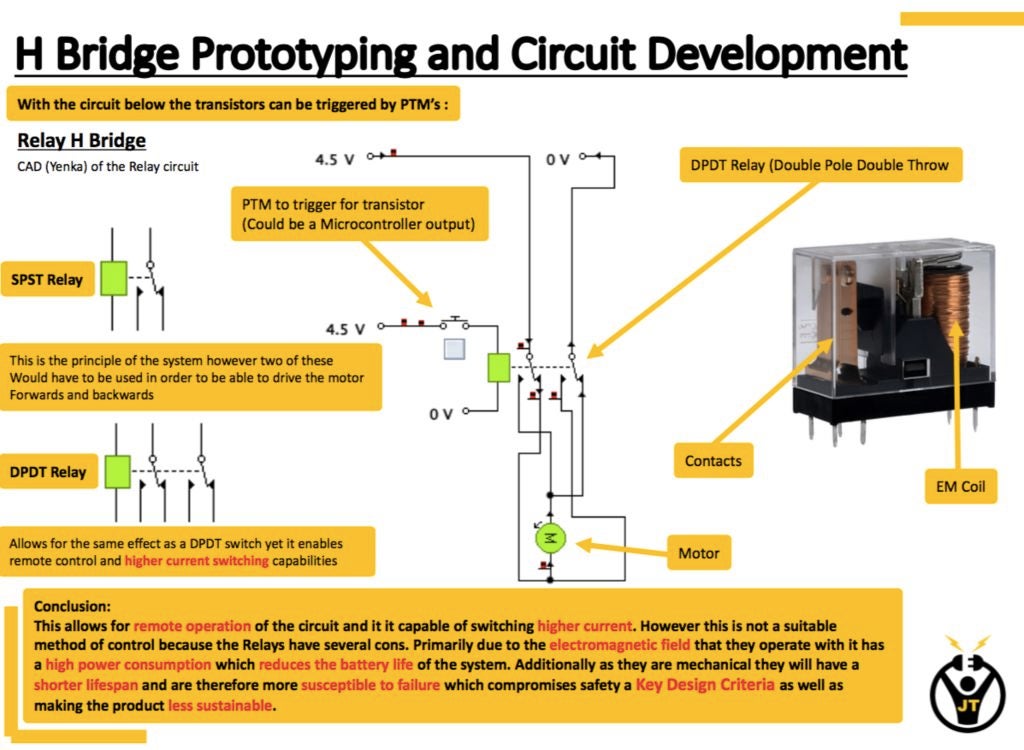
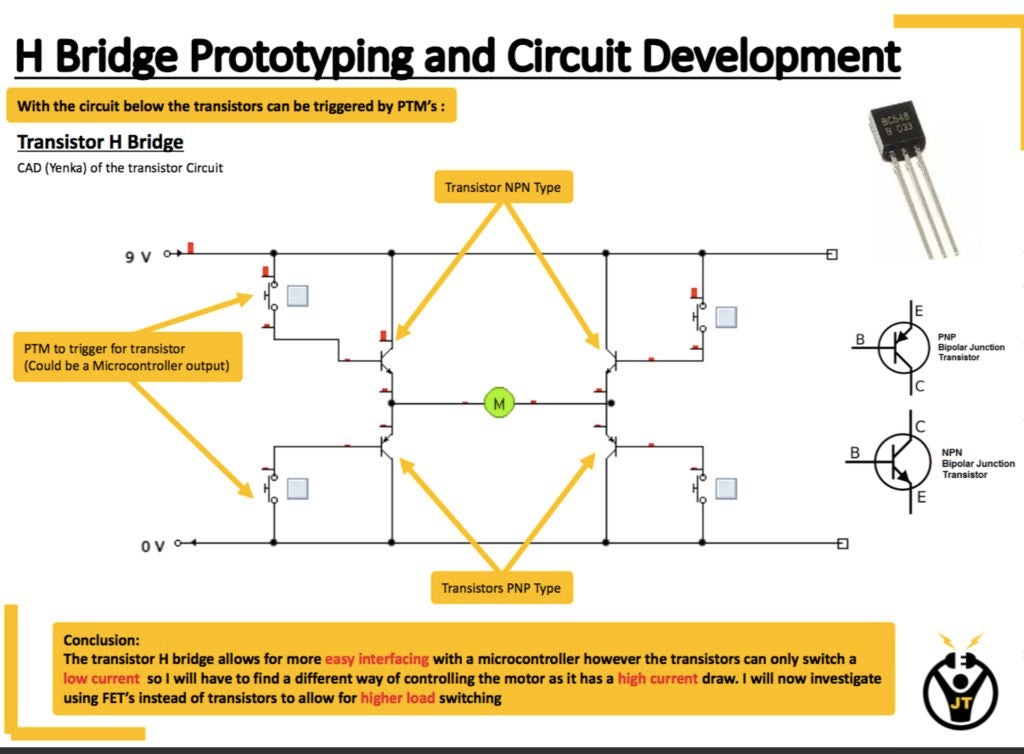
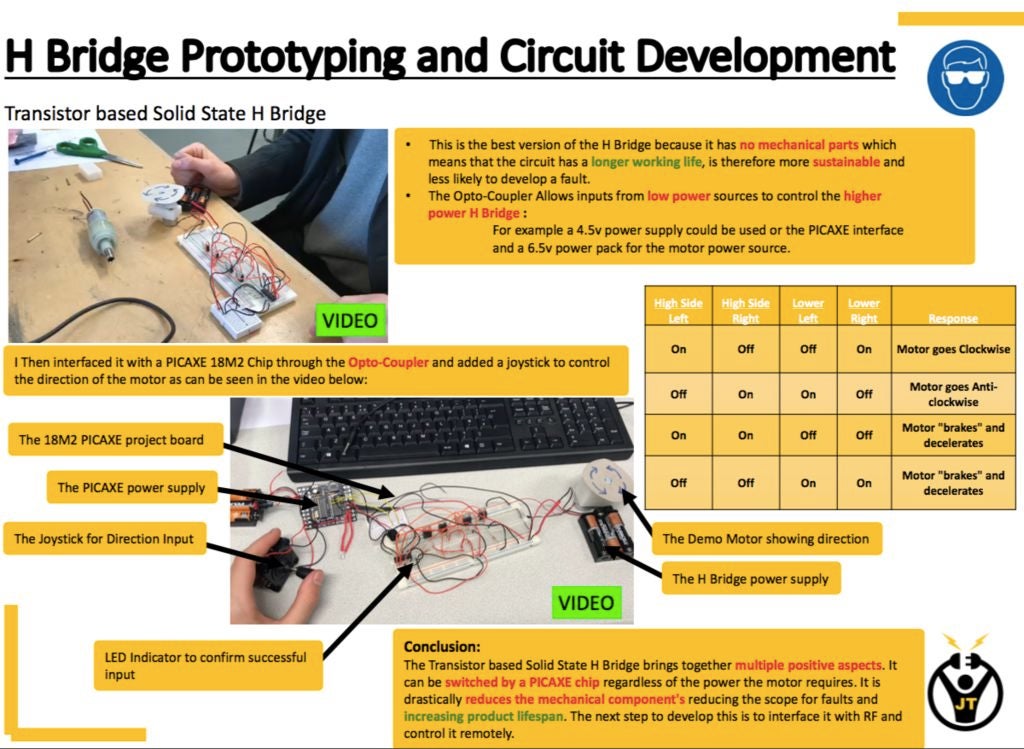
我决定为我的项目构建一个自定义电机驱动程序,使我能够将电机与我的微控制器连接并向前和向后运行。此外,在我的最终系统中,我还能够使用反电动势作为电机的制动器。请参阅上面的电机驱动器研究和增量开发。经过我的研究,我最终使用FET与光耦合器接口,如图所示!
第7步:装备


步骤8:软件
系统在钻机上有一个微控制器,在控制面板上有一个微控制器。
所有系统的代码都是在PICAXE程序编辑器的BASIC中编写的。
如果您希望复制,我建议您查看流程图,因为这将允许您在任何平台上实现它,无论如何。
注意:
此处显示的原始代码是早期开发代码,已经过删除,因为它没有帮助。
第9步:完成详细信息

为了让产品达到专业水平,我可以使用Roland Sticker Cutter(Dr Stika)将黑胶唱片切割成文字进行品牌塑造。
此外,您可以使用胶带条指示电源装置上电源组的正确方向。这样就可以轻松切换电池组,而不会让它们错位。
我抛光了抛光轮上的铝制间隔管,增加了设备的美观。
-
遥控
+关注
关注
11文章
285浏览量
57403
发布评论请先 登录
相关推荐
凸轮轴位置传感器安装注意事项
凸轮轴位置传感器常见故障排除
汽车凸轮轴位置传感器的作用 凸轮轴位置传感器信号分析
凸轮轴位置传感器与曲轴传感器的区别
凸轮轴位置传感器的工作原理 如何测试凸轮轴位置传感器
凸轮轴位置传感器故障诊断 如何选择凸轮轴位置传感器
电缆护层环流监测系统:保障电缆运行稳定的得力助手

电缆分布式光纤测温系统的应用

M12航空插座12pin如何预制电缆

守护电缆安全:高压电缆故障及隐患监测系统|实时监测与预警
全能型电缆隧道守护者:电缆隧道综合监控系统
电缆光纤测温系统|鼎信智慧|电缆温度安全守护者






 工商网监
工商网监
评论