 数字示波器的抖动噪声基底是什么
数字示波器的抖动噪声基底是什么
数字示波器的抖动噪声基底(Jitter Noise Floor)指标经常会被误会和误用,那么抖动噪声基底到底是什么?抖动噪声基底是示波器本身对抖动测量结果贡献的整体噪声,它经常被标定为统计结果,用有效值或标准偏差值(在平均值为0时,标准偏差值和有效值相同)来表示。
如果抖动噪声基底远小于希望测量的信号抖动,那么示波器就是测量抖动的正确仪器,相反,如果抖动噪声基底远高于希望测量的抖动,那么示波器就不是合适的仪器。
时基抖动(timebase jitter)是抖动噪声基底的一部分,它源于示波器的时基(clock)的抖动,即输入信号在被采样的时间上的抖动。
抖动噪声基底的另外一部分来自于示波器的垂直噪声(vertical noise)。抖动测量是基于信号与某阈值的交叉点的时刻与理想中它应该和某阈值交叉点的时刻进行比较后的结果。垂直噪声带来了测量的误差,看起来是添加了更多的抖动。误差的大小取决于噪声的大小以及信号在阈值位置的转换速率(斜率)。更大的噪声意味着更大的抖动,更快的斜率意味着更小的抖动。下图说明了垂直噪声如何转换为抖动。
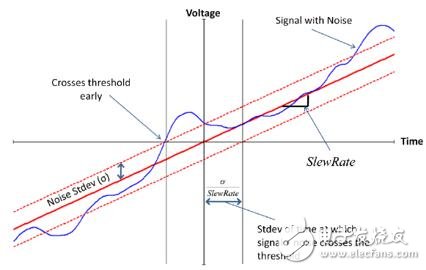
等式(1)说明了如何基于垂直噪声的标准偏差和信号的斜率来计算垂直噪声带来的抖动。

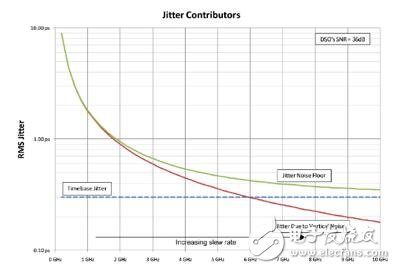
抖动噪声基底是时基抖动和垂直噪声引起的抖动的有效值之和。等式(2)说明了它们之间的关系。当垂直噪声等于0或者斜率无穷大时,抖动噪声基底等于时基抖动。

下图表示了抖动噪声基底,时基抖动和垂直噪声在不同斜率时引起的抖动之间的关系(图表中是假设正弦信号满栅格,信噪比为36dB)。
如前所述,抖动噪声基底取决于示波器的垂直噪声,输入信号的斜率和示波器的时基抖动。当比较示波器的抖动性能时,非常重要的一点是要理解抖动噪声基底或时基抖动是否被正确的标定了。如果对抖动噪声基底进行标定,还需要知道垂直噪声和相应的信号斜率。
当决定是否可以用某款示波器测量DUT的抖动时,就需要计算对于特定设置下的抖动噪声基底,为此,测量示波器的噪声的标准偏差(将示波器设置为将需要测量的DUT抖动的状态,去掉信号,测定stdev值),估计信号的斜率(有些示波器具有斜率测量参数),计算垂直噪声引起的抖动大小。Datasheet中的抖动噪声基底一般是基于经常用到的斜率/噪声测量到的,如果由于垂直噪声引起的抖动大于Datasheet中的值,就应当使用自己的抖动噪声基底。
-
数字示波器
+关注
关注
6文章
523浏览量
33571 -
正弦信号
+关注
关注
0文章
45浏览量
16542
发布评论请先 登录
相关推荐
怎么用数字示波器分析诸如电气噪声等随机信号

数字示波器提供的工具如何用来表征噪声
怎样将相位噪声和抖动降至最低及其估算方法
数字示波器的高精度抖动测试方法
抖动传递性能和相位噪声测量技术
VSA与N9030噪声基底差异是什么
8步教你进行实时示波器的抖动测量
测量较低时钟频率的相位噪声和相位抖动
时钟抖动(CLK)和相位噪声之间的转换

示波器的噪声来源及电源纹波噪声的测试方法


如何理解相位噪声与时间抖动的关系?

示波器测量之抖动的四个维度
时钟抖动与相位噪声的关系
电源轨噪声对系统时钟抖动的影响






 工商网监
工商网监
评论