 全自动机器人制作图解
全自动机器人制作图解
第1步:你需要什么
对于这个项目,你需要:
材料:
Arduino UNO x1
Motor Shield x1
面包板x1
直流电机x4
车轮x4
HC-SR04超声波传感器x1
9-V电池座x2
微伺服电机x1
9V电池x2
电工胶带
电线
黑匣子x1
触摸传感器x1
工具:
热胶枪
烙铁
3-D打印机
螺丝刀
剪线钳
步骤2:准备轮子
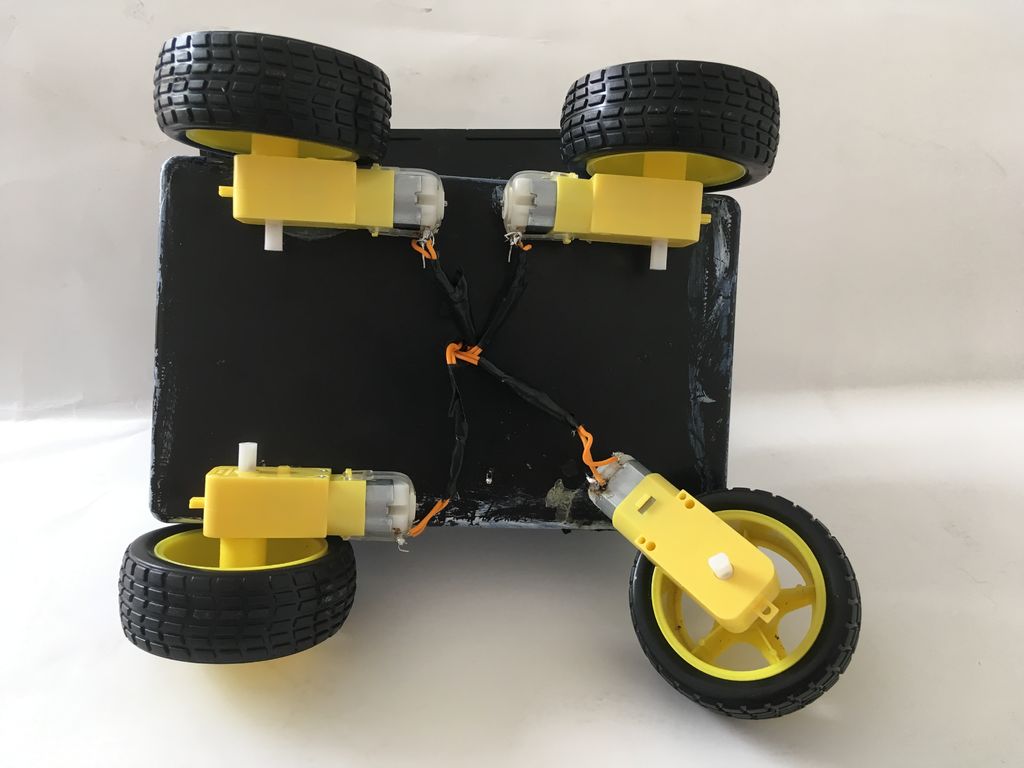

取两根跳线,将一根穿过直流电机侧面的铜制标签。使用烙铁,小心地将跳线焊接到直流电机。重复所有电机。
拿起滚轮并将其放在直流电机铜接头另一侧的白色销上。车轮应保持紧密,并与直流电机一起自由旋转。
要检查车轮是否正常工作,请将每个直流电机上焊接的每根电线放在9 V电池的正极和负极端子上。轮子应该旋转。
步骤3:准备3D打印组件
使用3-D打印机,打印以下.stl文件。如果需要改变设计,也包括零件文件。
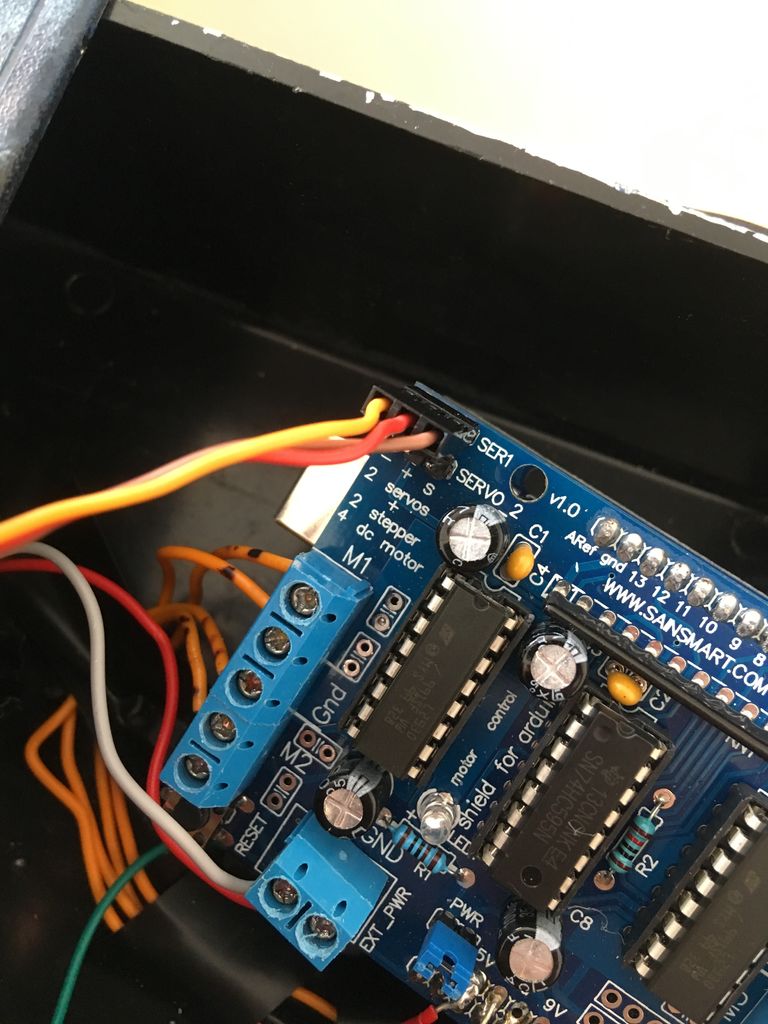
步骤4:设置电机屏蔽
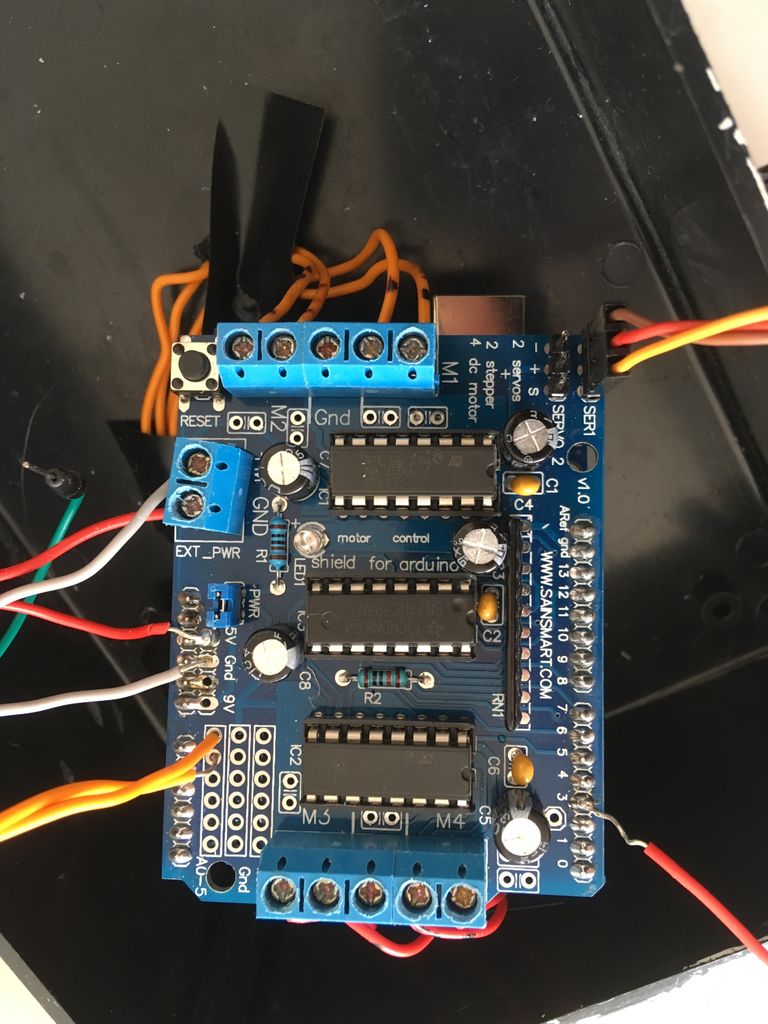
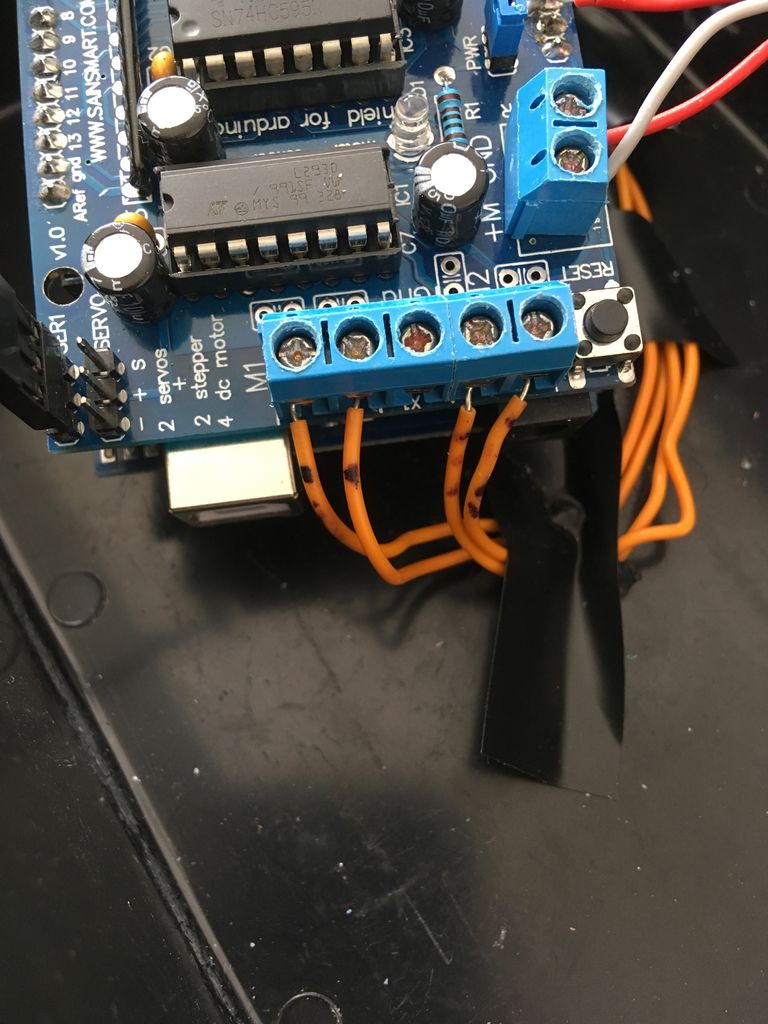

使用螺丝刀,我们将每根直流电机线连接到电机屏蔽上的M1 M2 M3和M4端口。
将控制左轮的电机连接到M1和M2端口,将右轮电机连接到M3和M4端口。
如果电机正在向后运行,只需切换该电机的电机屏蔽端口上的电线即可。 (基本上切换正负连接)。
焊接长导线连接到电机屏蔽上的+ 5V,接地,A0,A1和引脚3。这些将用于在后续步骤中连接面包板,超声波传感器和触摸传感器。
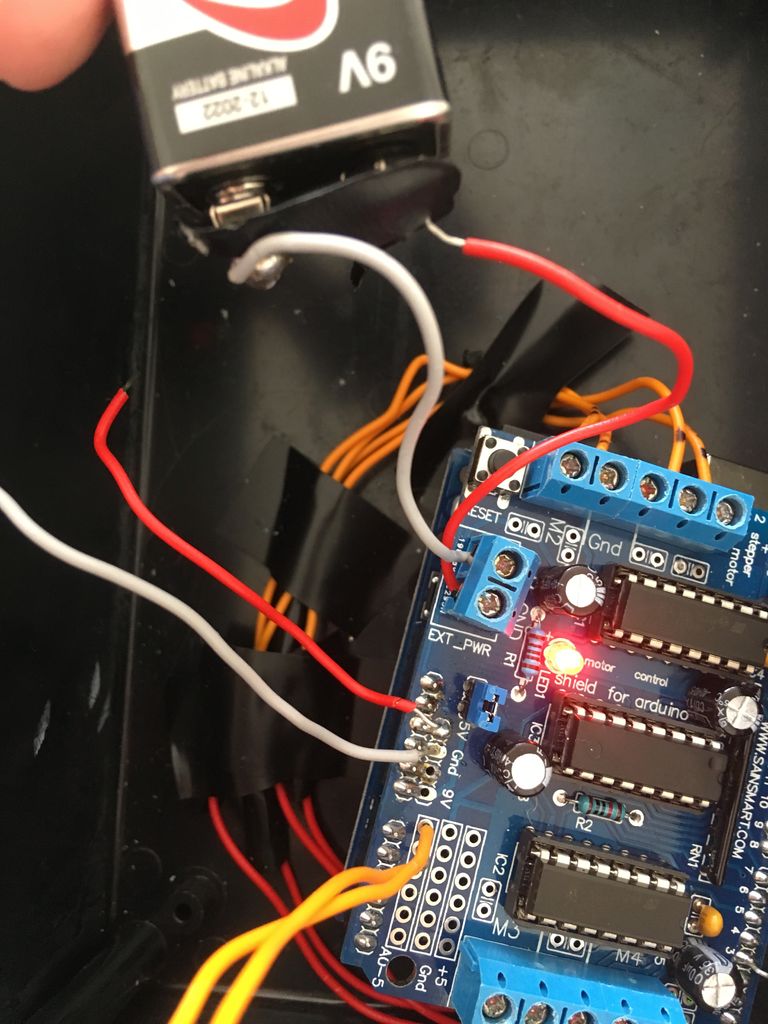
使用螺丝刀将电池座连接到电机护罩上的EXT_PWR端口。这将为电动机护罩和车轮提供动力。
将电机护罩放在Arduino上,确保端口正确对齐。
步骤5:连接面包板
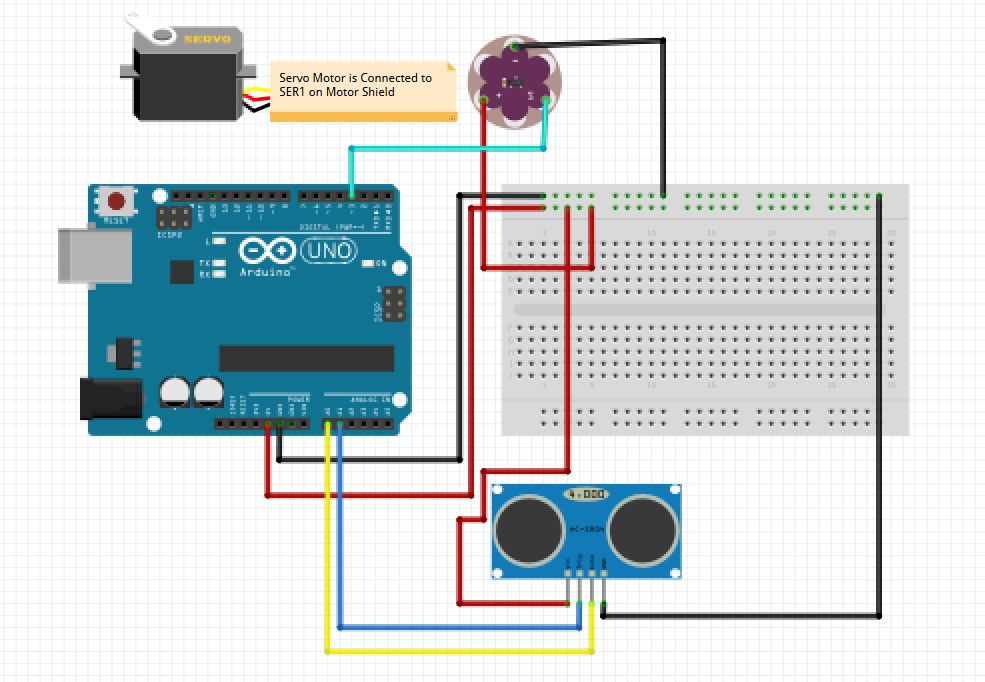
为简单起见,大多数连接都焊接在电机屏蔽上。面包板主要用于提供+ 5V和接地连接。
在最后一步中使用焊接在电机屏蔽层上的电线,将+ 5V电线连接到面包板的红色电源板,并将地线连接到面包板上的蓝色电源板。
步骤6:设置HC-SR04超声波传感器
对于此部件,您将需要3-D打印部件从第3步开始!
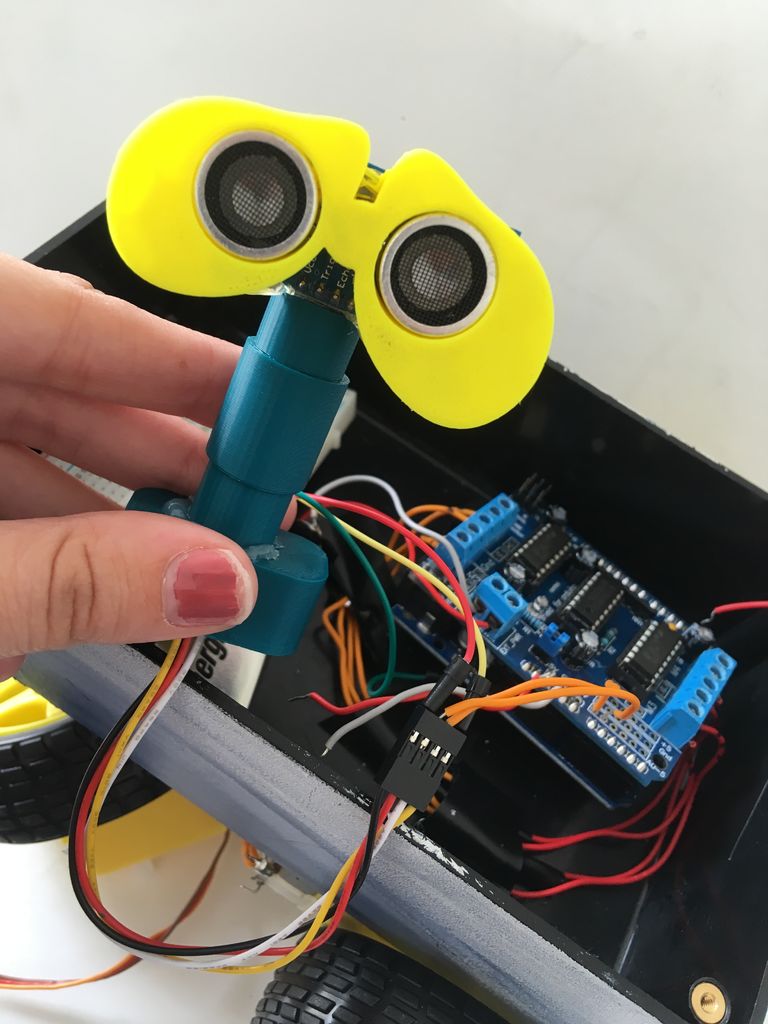
将超声波传感器安装到三维印刷超声波传感器支架部件中。将4根母对母跳线连接到超声波传感器背面的接地,触发,回声和VCC端口。将跳线穿过伺服安装部件的内部并使用热胶将伺服安装部件连接到超声波传感器支架部件。
将步骤4中焊接到电机屏蔽层的电线连接到超声波传感器母对母连接的末端.TRIG应连接到A0,ECHO应连接到A1。从面包板上的红色电源板到超声波传感器上的VCC端口以及从蓝色电源板到GROUND端口的另一个连接进行连接。
用电工胶带固定连接以确保它们不会松动。
步骤7:设置伺服电机
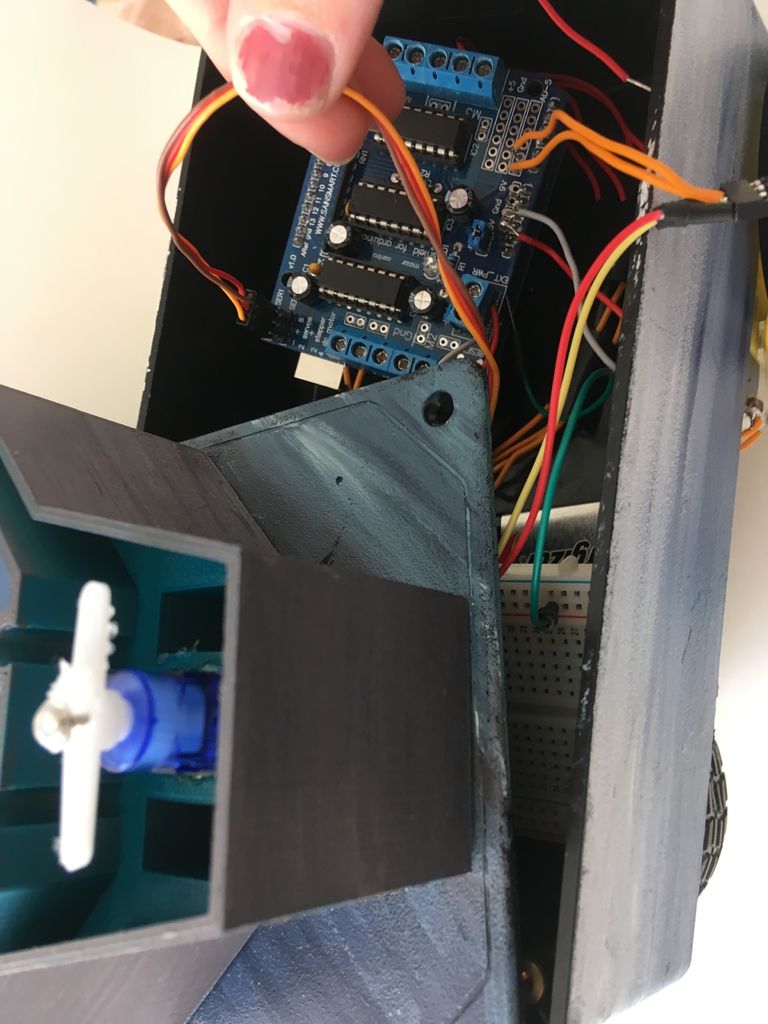
对于此步骤,您将需要Base 3-D打印部件。
将伺服电机安装到底座3-D打印部件的中心开口(3个矩形开口的中间开口)上。通过开口运行伺服电线,并将伺服电机连接到电机屏蔽角上的SER1端口。
将上一步的超声波胶片热胶粘到伺服电机的顶部。
步骤8:设置触摸传感器
将3根母对母跳线连接到背面的G,V和S端口。触摸传感器。
将焊接在电机屏蔽引脚3上的电线连接到触摸传感器上的S端口。运行从面包板上的红色电源板到超声波传感器上的VCC端口以及从蓝色电源板到GROUND端口的另一个连接的连接。
步骤9:组装Rob
加热你的热胶枪,它将在这一步骤中广泛使用。当您等待热胶枪加热时,使用丙烯酸漆在Make Course中提供的黑盒子。等待它干燥。
一旦胶水变热,将底座/超声波传感器部件粘在盒子顶部。将电线放在盒子内侧。将电机护罩,Arduino和面包板放入盒子内。
将四个直流电机热粘在盒子底部,确保连接到M1和M2的轮子在左侧,连接到M3和M4的轮子在右侧。此时,Rob应该完全减去代码。
步骤10:代码
为了运行提供的代码,首先必须将AFmotor和NewPing文件下载到arduino库中.r
下载FinalCode_4connect文件并将其上传到您的arduino。
代码设置的功能有助于在机器人出现障碍时更改机器人的路径。当它检测到障碍物时Rob停止,并向左和向右检查并根据障碍物的位置调用前进,后退,转向,转弯和转弯功能,以便他可以向正确的方向移动。当按下触摸传感器时,伺服开始测量其周围,Rob向前移动直到他检测到障碍物。当检测到障碍物时,Rob停止并启动changePath功能。
您的机器人现在应该跑步并避开障碍物!
-
机器人
+关注
关注
211文章
28418浏览量
207097
发布评论请先 登录
相关推荐
移动机器人的技术突破和未来展望

智能移动机器人系统方案指南


开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
智能移动机器人

探索AC自动机:多关键词搜索的原理与应用案例
如何借助恩智浦MCX系列MCU纠错功能,打造可靠安全的移动机器人?

Al大模型机器人
自动停车机器人,如何快速构建?

海康机器人第100000台移动机器人下线
全自动机器人激光焊接机主要用于哪些行业

自主移动机器人(AMR)功能和特点






 工商网监
工商网监
评论