 一文读懂室内定位技术
一文读懂室内定位技术

目前Bluetooth AoA可以有两种不同的应用场景,第一,室内位置定位;第二,无钥匙进入,我们一一叙述,今天只讲第一种。
1. 室内定位技术梳理
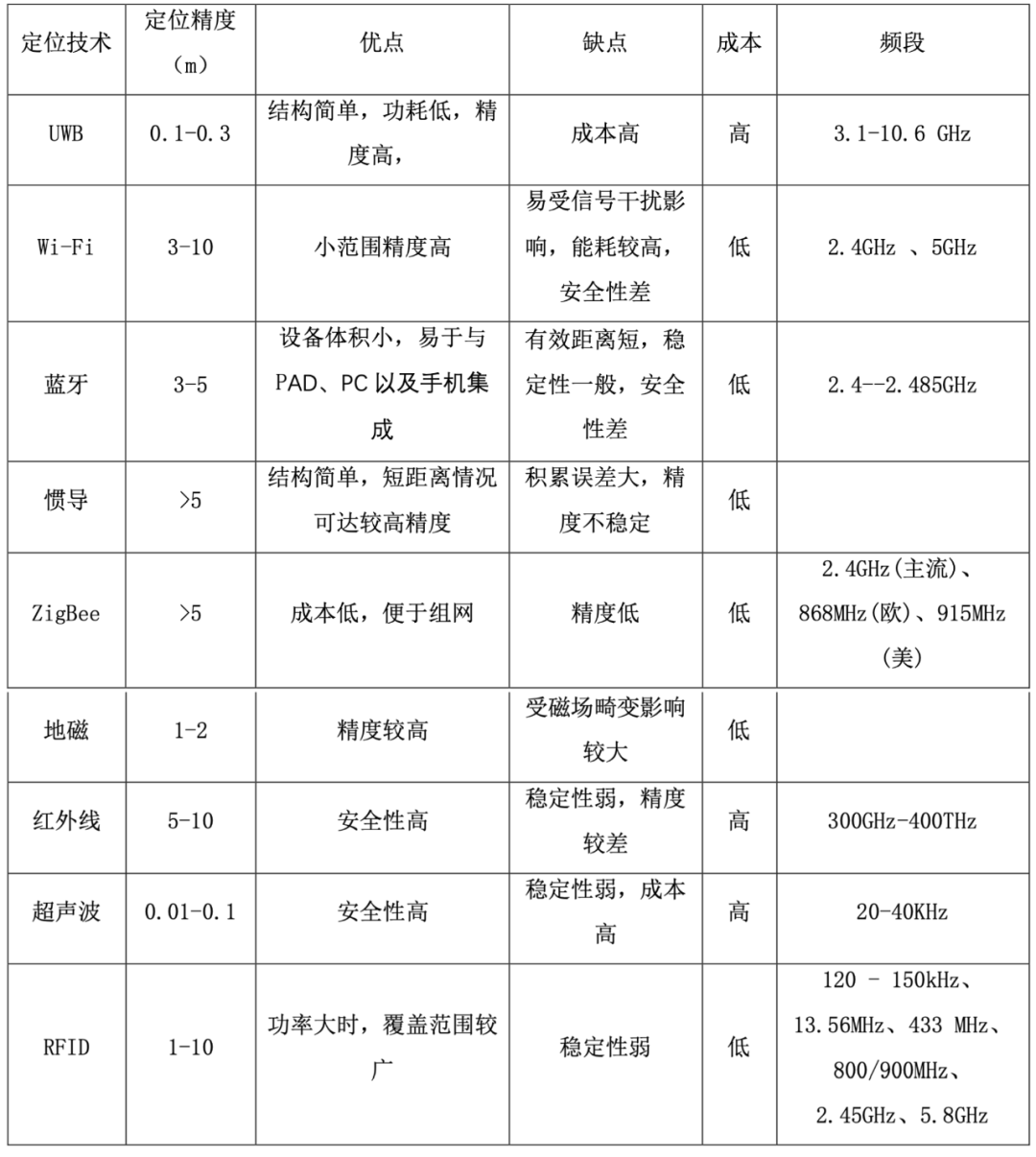
目前室内定位有采用UWB,Wifi,BLE信标和BLE AoA三种实现方式,UWB精度在0.1-1米范围,Wifi,BLE信标误差范围较大在5-20m范围,Quuppa作为第一家商用BLE AoA定位服务公司,可以精度范围在0.1-1m范围。(采用TI CC254x,Nordic5281x芯片)。

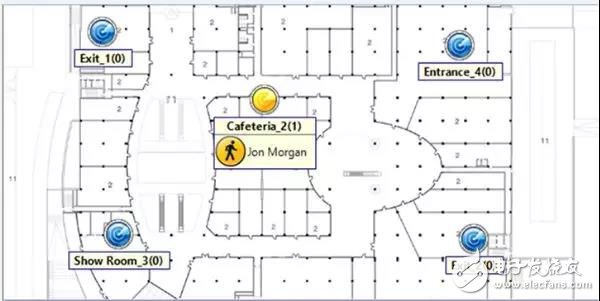
Quuppa测试数据
2. 室内定位原理分析
无论采用何种定位方式,室内定位系统需要建模实际场景,在室内区域部署接收机路由器,并在建模地图中标记相应位置;手机或是信标模块,作为beacon发射机,发送无线信号,部署在固定位置的接收机在接收到无线信号后即可判定该信标进入该区域范围。
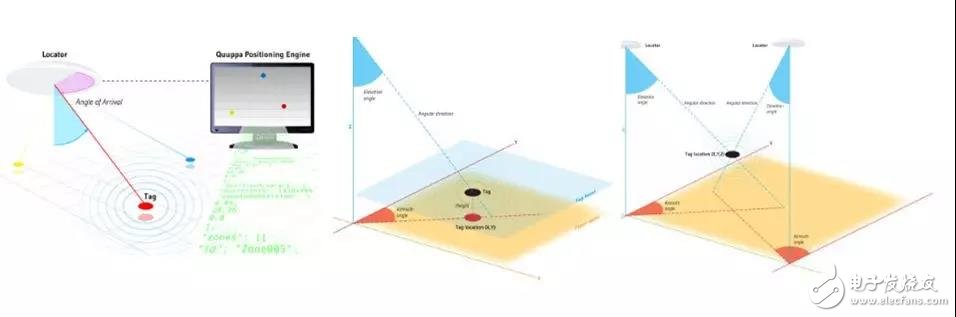
在确定区域范围之后,可以通过多天线测量beacon信号到达角度,以及三角形定位法,即可计算出beacon设备精确位置。
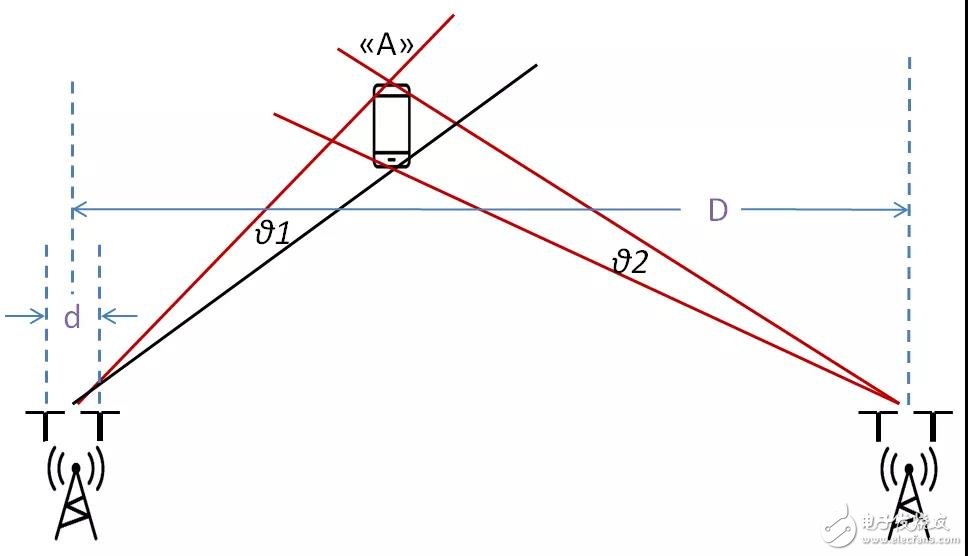
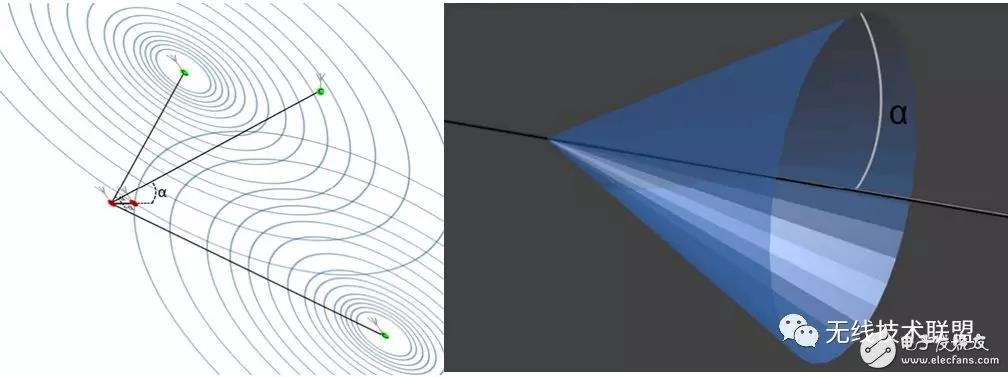
三角定位三角定位法顾名思义即通过两组到达角度,确定beacon设备位置,如下图所示,两组天线即可测量到一个到达角度,两个到达角度即可确定设备A位置。关键问题来了,d和D都是已知参数,如何求θ1,和θ2。
3. 到达角度AoA(Angle of Arrive)测量原理
工作频率:蓝牙信号在ISM (Industrial Scientific and Medical ) 2.40GHz到2.41GHz频段工作,带宽为2M hz,蓝牙分为三个广播信道,37,38,39,并且在蓝牙5.x规范当中,Bluetooth LE部分的扩展广播信道可以在0-39任意信道,也即位蓝牙信标可以工作在任何蓝牙频道。(蓝牙在工作时的工作频率不一致,会影响蓝牙的波长λ发生变化)。
相位:无线信号在空中传播是连续的,RX接收机通常会接受该频段范围内0-2π整个无线信号的传输时间的信号并解调。
到达角度计算:假设目前有一固定频率蓝牙beacon信号在空旷区域进行传播(忽略遇到障碍物以及空中其他2.4G信号干扰),如果两接收机处于相同TX端相同半径上,在某一时刻t,RX接收机接收到的相位差理应为0,但如量接收机处于半径不一致的位置,在某一时刻t,RX接收机的相位是有一个差值。
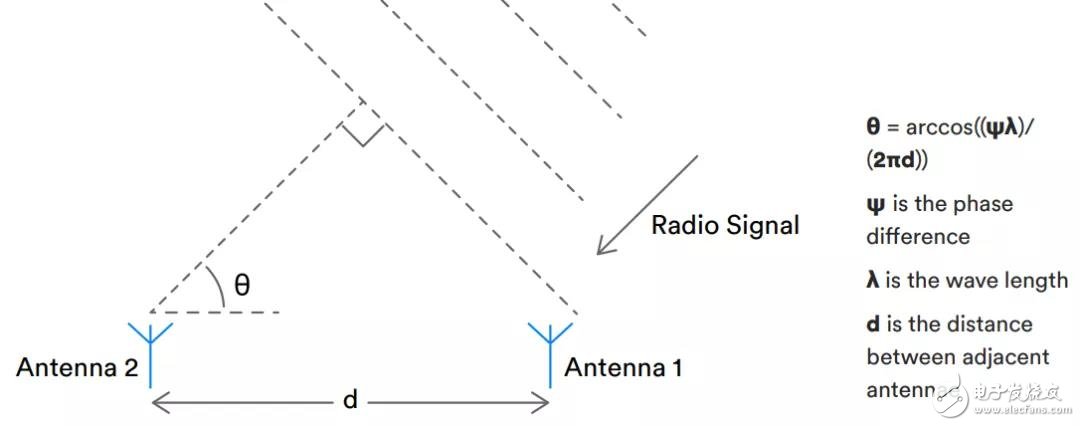
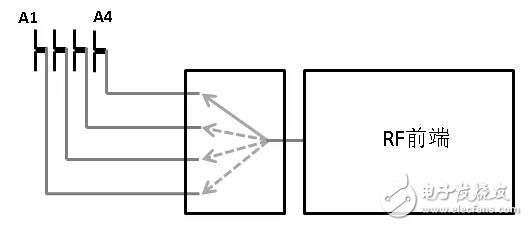
如果上面的这幅图不好理解,我们换下面的示意图来表示这幅,信号在传输过程中因天线位置不同,在某一个时间t上,采样到该信号的相位有差异。
在已知两天线位置d,beacon信号频率(即波长),可以计算出beacon信号与天线A1,A2直接的相位差θ,在计算出不同位置的两组θ,即可计算出beacon信号的位置。
AoA测量误差
在2维平面为例,会存在两个为a的角度,在现实三位坐标下,则会有一个以a为半径的圆的轨迹线,AoA接收机只知道该beacon信号处于该圆圈轨迹上,但无法判断它们处于哪个位置,这个时候就需要正交天线阵列来确认beacon点的位置坐标。
天线阵列的布置方式多种多样,一为定位,二为最大化减少接收机部署的个数,常见天线整列部署如下所示。
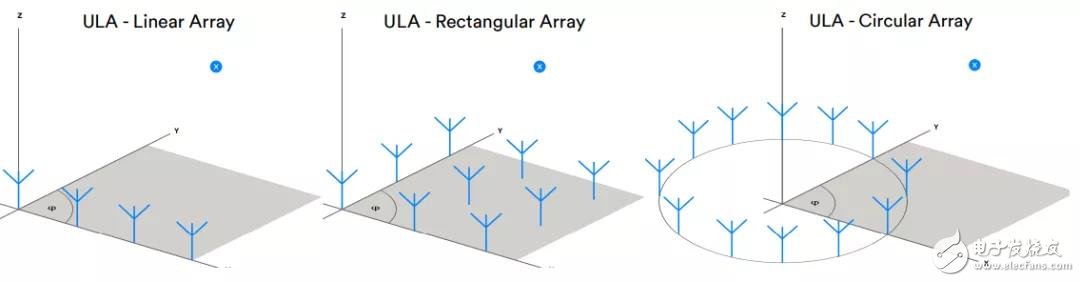
天线阵列举例
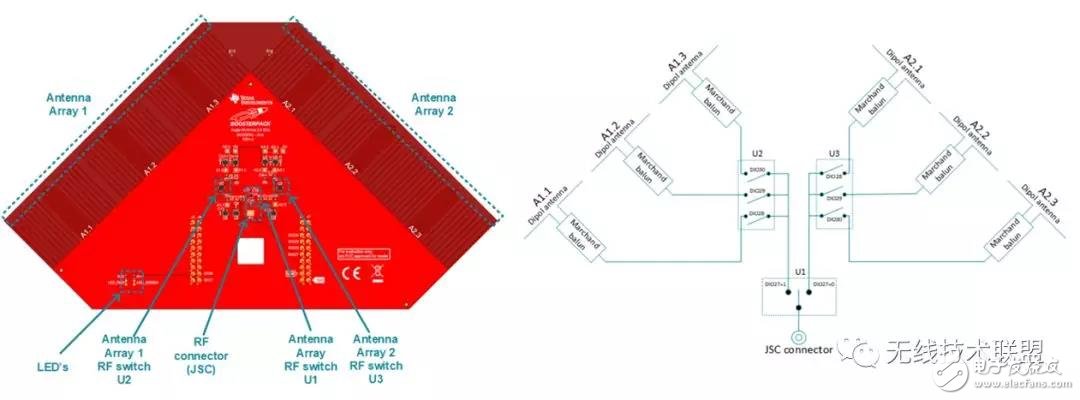
TI德州仪器EVM天线阵列
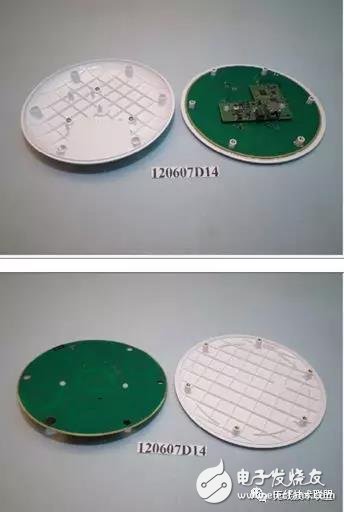
Quuppa接收机拆机天线阵列
4. Bluetooth 5.1 AoA软件部署
蓝牙联盟在5.1协议中为AoA协议在逻辑链路层(LL)做了相应规范。
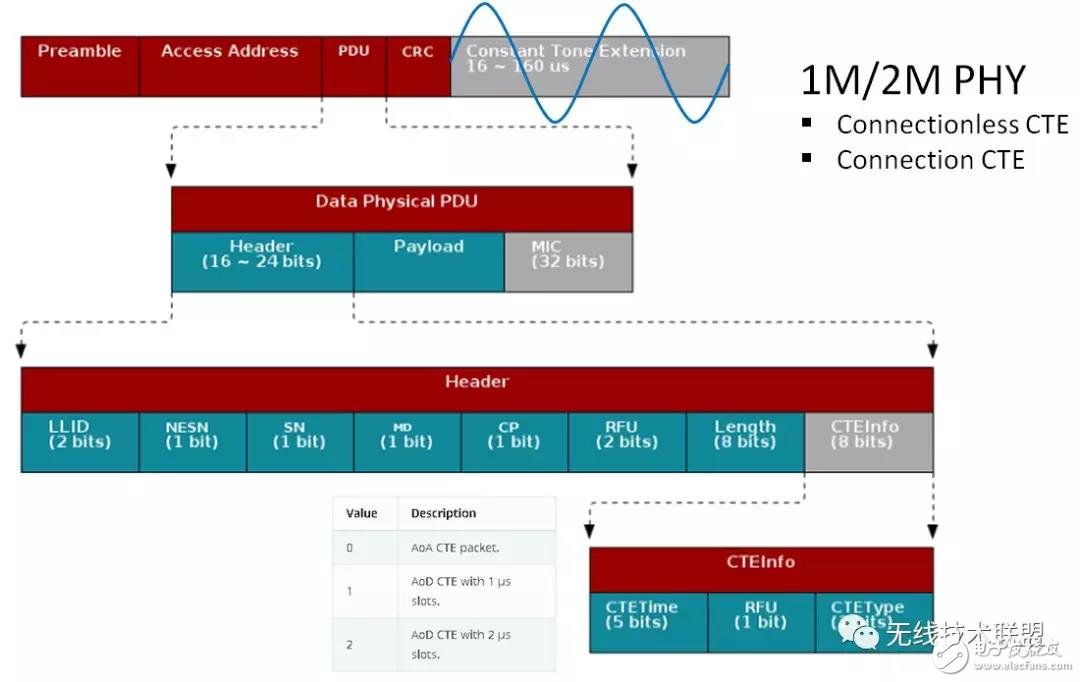
AoA/AoD可以在1M或者2M常规PHY下工作(不支持编码PHY),支持广播模式和连接模式两种类型。数据传输格式做了如下要求:在PDU数据包中,规范了AoA/AoD规范,CTE是AoA/AoD数据包的扩展数据,持续时常16-160us,250khz信号调制在载波之上,无白化,无CRC效验,该信号用于接收机RX在t时间采样信号I/Q值,计算相位差使用。
5. AoA设计挑战
信号反射干扰
上文讨论是在理想情况下,空旷距离,无其他信号干扰,现实使用场景中RX接收机会接收到自己或者其他aoa becaon信号反射信号,该信号同样携带CTE扩展数据包,但是属于噪声信号需要消除。
开关时间补偿
一个RF内核控制多路RF天线,除信号在空气介质传输的时间,RF开关切换时间需要考虑在内加以补偿。
角度值误差
测量必有误差,该误差范围通常在3%-5%,需要靠算法降低误差。
6. AoA角度测量芯片供应商
-
蓝牙
+关注
关注
119文章
6408浏览量
179392 -
室内定位
+关注
关注
30文章
324浏览量
37788
发布评论请先 登录
为什么UWB定位技术可用于室内定位?
基于UWB技术的室内定位方法简述
一文深度了解室内定位的应用场景

室内定位技术有哪些_七大室内定位技术详解
九种室内定位技术概览 室内定位技术的原理和应用场景



评论