 如何制作基于Arduino的激光数控木雕刻机和薄纸切割机
如何制作基于Arduino的激光数控木雕刻机和薄纸切割机
步骤1:所需的零件和材料
2x DVD驱动步进机构
2x A4988步进电机驱动模块(或GRBL屏蔽)
250mW带可调透镜(或以上)的激光器
最小12v 2Amps电源
1x 10k电阻
li》
1x 47欧姆电阻器
1x LM7805稳压器(带散热器)
空白PCB板
公母接头
2.5mm JST XH型2针公连接器
1x 1000uf 16v电容器
跳线电缆
8x小钕磁铁(我从DVD镜头机构打捞出来) )
拉链(100mm)
超级胶水
环氧胶
木质plyboard
亚克力板
一些M4螺钉,螺栓和螺母
激光安全眼镜
本项目必须使用激光安全眼镜。
大部分被中国人通过名为BANGGOOD的网站抢救或带来的部分。
第2步:拆开DVD驱动器步进机制
两个DVD驱动程序机械是必需的,一个用于X轴,第二个用于Y轴。
使用小型十字头螺丝刀我拆下所有螺钉和分离的步进电机,滑轨和从动件。
步进电机是4针双极步进电机。
DVD电机体积小,成本低,意味着您不能期望电机具有高分辨率。这是由导螺杆提供的。另外,并非所有这些电机都能达到20步/转。 24也是一个常见的规范。您只需要测试电机以查看其功能。
计算CD驱动器步进电机分辨率的步骤:
为了测量分辨率在CD/DVD驱动步进电机中,使用数字测微计。测量沿螺杆的距离。使用千分尺的螺钉的总长度,结果为51.56mm。确定导程值,即螺钉上两个相邻螺纹之间的距离。线程被计为在该距离内的12个线程。导程=相邻螺纹之间的距离=(总长度/螺纹数= 51.56 mm)/12 = 4.29mm/rev。
步进角为18度,相当于20步/转。现在所需的所有信息都可用,步进电机的分辨率可以如下计算:
分辨率=(相邻螺纹之间的距离)/(N步/转)=(4.29mm/rev)/(20步骤/转)= 0.214毫米/步。这是所需分辨率的3倍,即0.68mm/步。
步骤3:为X和Y轴组装滑轨
对于滑轨,我使用了2个额外的杆,以获得更好和更顺畅的性能。滑块的主要功能是自由滑动杆,杆与滑块之间的摩擦最小。
我花了一些时间让滑块在杆上自由滑动。
步骤4:步进器X和Y的主框架
使用我制作的一些亚克力板两个主要框架为步进和滑轨。步进电机在主机架和底座之间有间隔,轴必须是。
步骤5:用主机架安装滑轨
首先使用超级胶水我试过调整适当的导轨的位置,应使从动件与步进螺纹正确接触。接触应适当不要太紧或不要太渣。如果从动件和螺纹之间的接触不正确,则在运行状态下,步骤将跳过或电动机将吸取比平常更多的电流。调整需要一些时间。
调整好后,使用环氧胶将其固定。
步骤6:步进电机接线
对于步进电机,我使用旧的usb电缆,因为它内部有4根电线,上面有一个盖子,它是更灵活,更易于使用。
在万用表中使用连续性模式确定2线圈,线圈A和线圈B。
我通过选择颜色制作2对线,一对用于线圈A和第二个用于线圈B.焊接它们并在其上使用热缩管。
步骤7:梳理X轴和Y轴
X和Y协调运动。
我将X和Y轴的滑块相互垂直地连接在一起,在它们之间使用了一些垫片。并在其上方附上一个薄金属烤架作为工作床。钕磁铁用作工件支架。
步骤8:电子设备
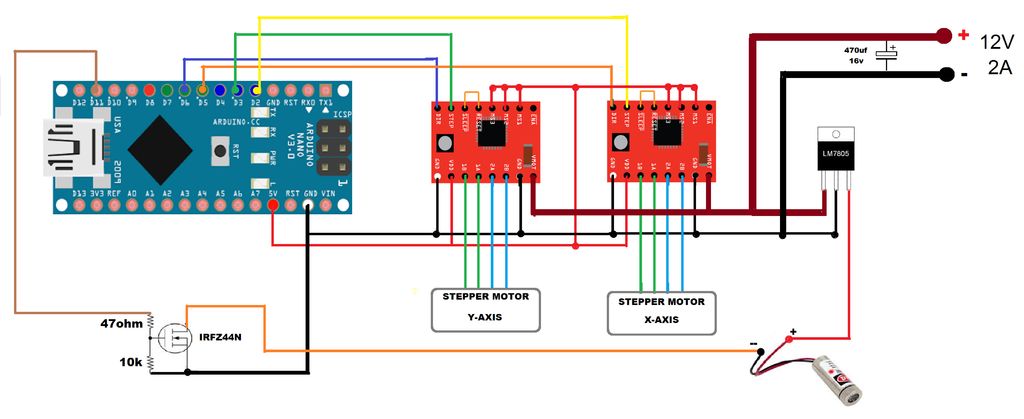
用于驱动程序的部件是:
Arduino Nano。
2x A4988步进电机驱动器。
1x IRFZ44N N-CHANNEL MOSFET。
1x LM7805带散热器的稳压器。
1x 47ohm和1x 10k电阻。
1x 1000uf 16V电容。
1x 2.5mm JST XH型2pin公连接器。
男性和女性头部针脚。
1x(20mm x 80mm空白PCB)。
在GRBL中,保留了Arduino的数字和模拟引脚。 X轴和Y轴的“Step”引脚分别连接到数字引脚2和3。 X轴和Y轴的“Dir”引脚分别连接到数字引脚5和6。 D11用于激光启用。
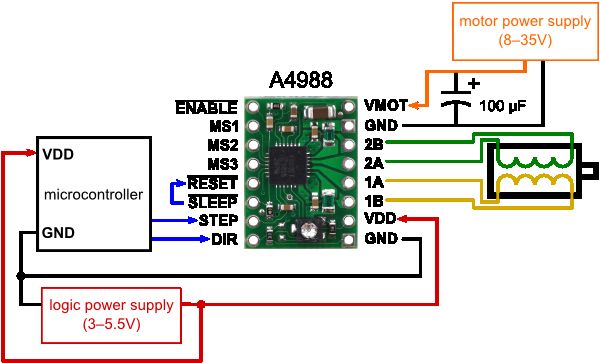
Arduino通过USB线获得电力。 A4988驱动器通过外部电源供电。所有地面共享共同连接。 A4988的VDD连接到5V的Arduino。
我使用的激光器运行在5V并且内置恒流电路。对于来自外部电源的恒定5V电源,使用LM7805稳压器。散热器是强制性的。
当从Arduino引脚D11接收数字高信号时,IRFZ44N N-CHANNEL MOSFET作为电子开关工作。
注意:不能使用Arduino nano的5V电压因为激光吸收的电流超过250mA,而Arduino Nano无法提供足够的电流。
为每个轴配置微步进。
MS0 MS1 MS2微步分辨率。
低低低全步。
高低低半步。
低高低四分之一步。
高高低八步。
高高第十六步。
3个引脚(MS1,MS2和MS3)用于根据上述真值表选择五步分辨率中的一个。这些引脚具有内部下拉电阻,因此如果我们将它们断开,则电路板将以全步模式工作。我使用了第16步配置,平滑无噪音。大多数(但肯定不是全部)步进电机每转完成200步。通过适当地管理线圈中的电流,可以使电动机以较小的步长移动。 Pololu A4988可以使电机以1/16步进行 - 或每转3,200步。微步进的主要优点是减少运动的粗糙度。唯一完全准确的位置是全步位置。电机不能在一个中间位置保持静止位置,具有相同的位置精度或与全步位置相同的保持转矩。一般来说,当需要高速时,应使用全步骤。
步骤9:将所有内容组合成一个
我用一根细长的金属条和一些带有支撑的塑料L支架制作了一个激光支架。然后使用M4螺钉,螺母和螺栓将所有东西安装在木质铺层板上。
也可以将步进电机连接到驱动器上。
步骤10:激光汇编
我使用的激光器是可聚焦激光模块200-250mW 650nm。外部金属外壳用作激光二极管的散热器。它具有可聚焦镜头,用于调整激光点。
使用两个拉链我已将激光器安装在支架上。也可以使用激光散热器,但我的激光器没有过热,所以我没有使用它。将激光线端子连接到驱动板上的激光插座。
您可以在此处获得一个
步骤11:调整步进驱动器电流
为了实现高步进速率,电机电源通常比没有有源电流限制时允许的电压高得多。例如,典型的步进电机可能具有最大额定电流1A和5Ω线圈电阻,这表示最大电机电源为5 V.使用12 V电机可以实现更高的步进速率,但电流必须主动限制在1A以下,以防止损坏电机。
A4988支持这种有源电流限制,电路板上的微调电位器可用于设置电流限制。设置电流限制的一种方法是将驱动器置于全步模式,并测量通过单个电机线圈运行的电流,而无需为STEP输入提供时钟。测得的电流将是电流限值的0.7倍(因为两个线圈始终处于开启状态,并且在全步模式下限制为电流限制设置的70%)。请注意,将逻辑电压Vdd更改为不同的值将改变电流限制设置,因为“ref”引脚上的电压是Vdd的函数。设置电流限制的另一种方法是直接测量电位器顶部的电压并计算得到的电流限值(电流检测电阻为0.1Ω)。电流限制与参考电压有关,如下所示:电流限制= VREF×1.25 因此,例如,如果参考电压为0.6 V,则电流限制为0.75A。如上所述,在全步进模式下,通过线圈的电流限制在电流限制的70%,因此要获得1A的全步线圈电流,电流限制应为1A/0.7 = 1.4A,相当于VREF为1.4A/1.25 = 1.12 V.有关更多信息,请参见A4988数据手册。注意:线圈电流可能与电源电流有很大差异,因此不应使用电源测量的电流来设置电流限制。放置电流表的适当位置与其中一个步进电机线圈串联。
步骤12:准备就绪!
使用四个小的钕磁铁将工件锁定在工作台上,并将X和Y轴设置到初始位置(原点)。通过外部电源为驱动器板供电,通过USB A到USB Mini B电缆将Arduino Nano连接到计算机。同时通过外部电源为电路板供电。
安全第一。
激光安全眼镜必须
步骤13:GRBL固件
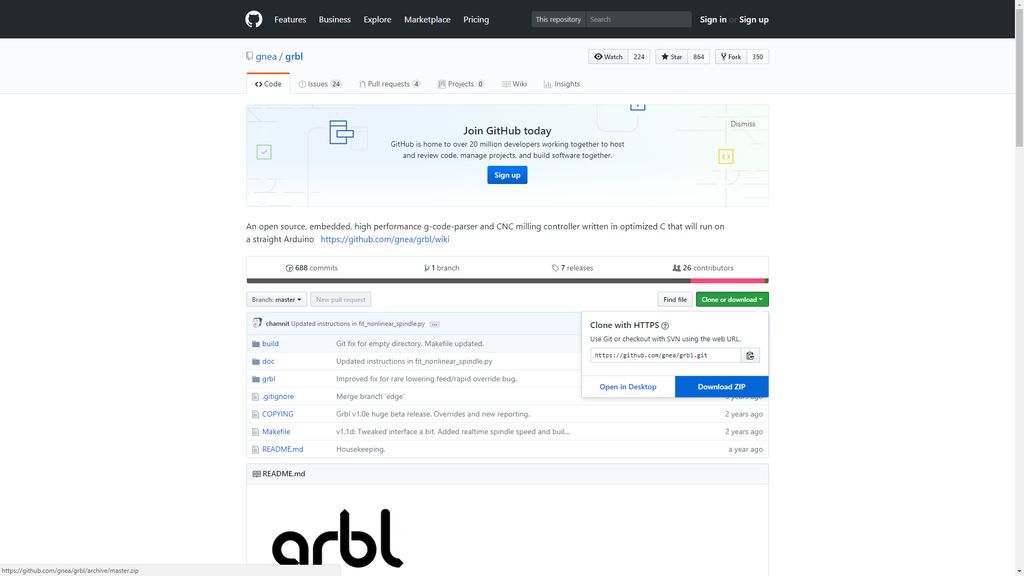
下载GRBL 1.1,在这里,
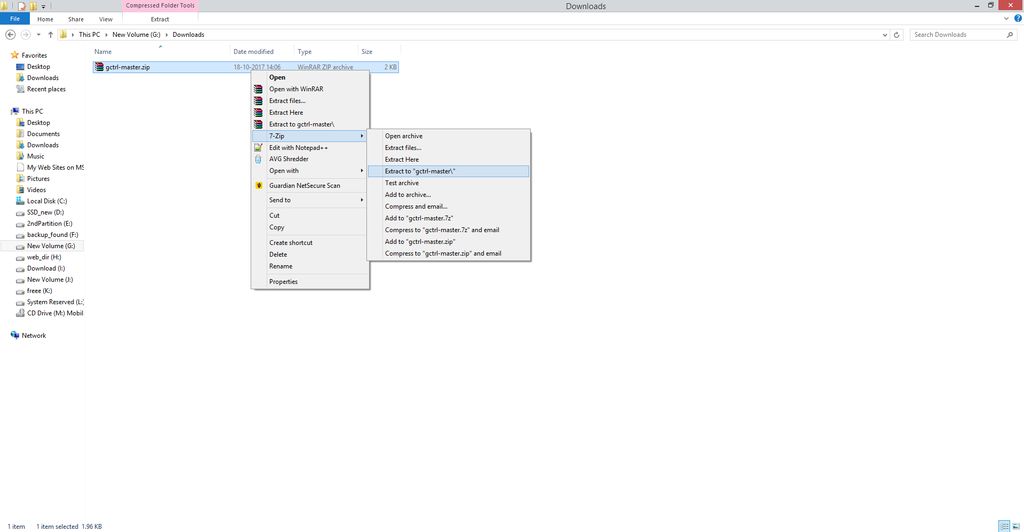
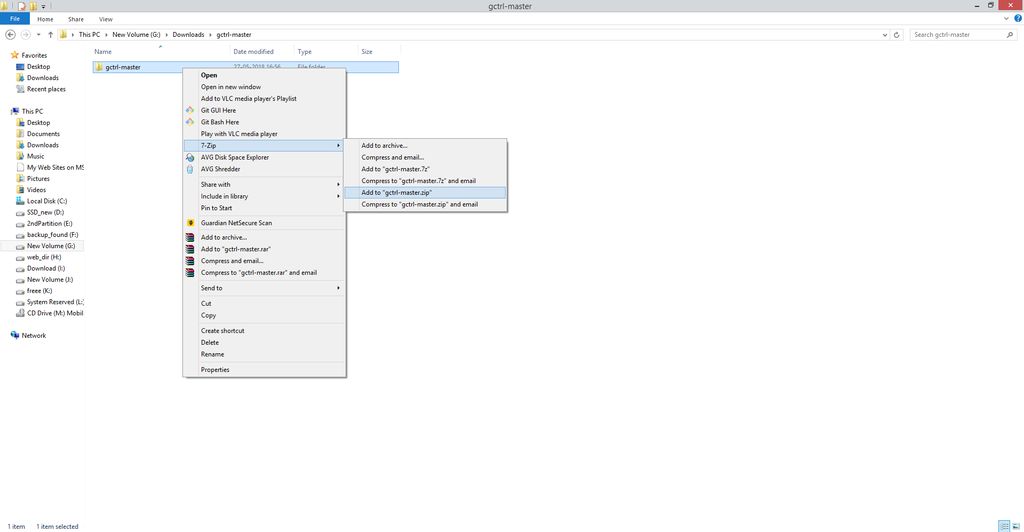
在桌面上提取grbl-master文件夹,您可以在文件master.zip中找到它。
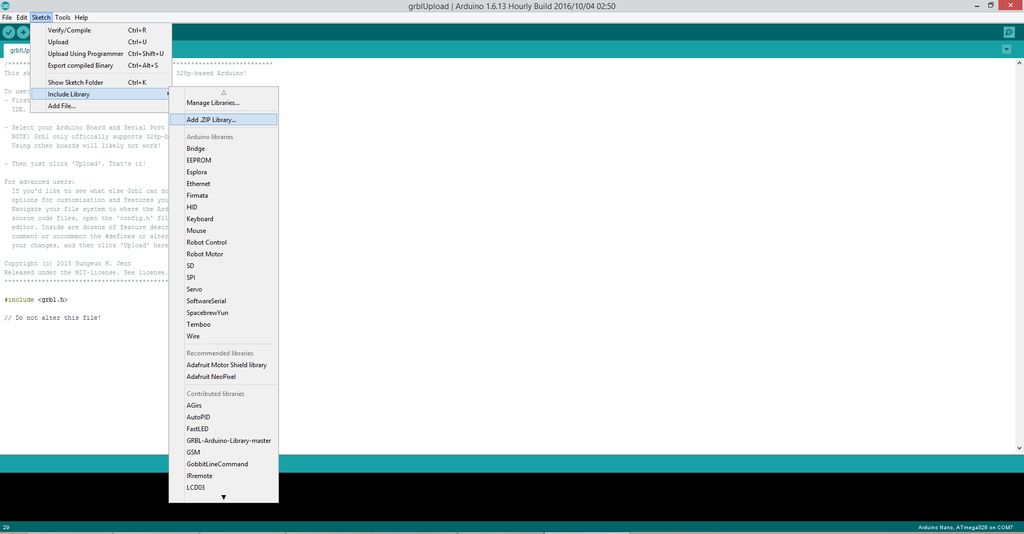
运行Arduino IDE
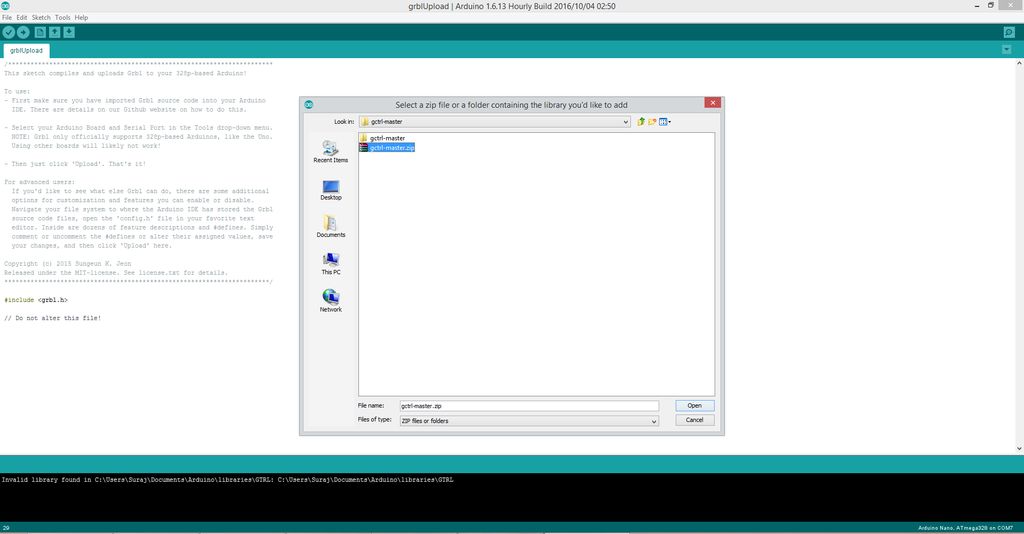
从应用程序栏菜单中选择:草图 - 》 #include库 - 》从文件添加库.ZIP
选择您可以在grlb-master文件夹中找到的文件夹grbl,然后单击打开
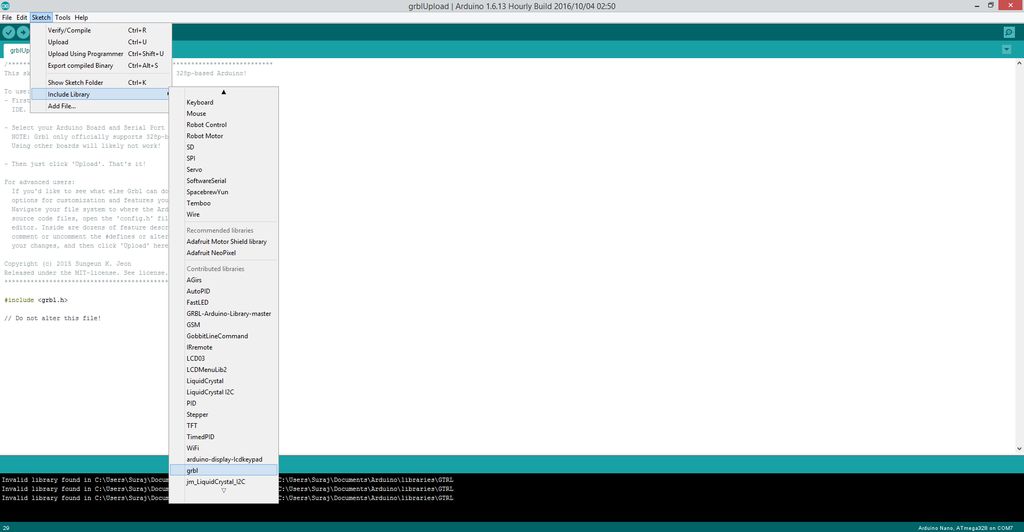
现在已安装库,IDE软件将显示以下消息:已添加库到你的图书馆。检查“库包含”菜单。
然后打开一个名为“grbl upload”的示例并将其上传到您的arduino板
步骤14:软件发送G-CODE





我们还需要一个软件将G-Code发送到CNC,因为我使用的是LASER GRBL
LaserGRBL是DIY激光雕刻机最好的Windows GCode流光之一。 LaserGRBL能够将GCode路径加载并传输到arduino,并使用内部转换工具雕刻图像,图片和徽标。
LASER GRBL下载。
LaserGRBL不断检查可用的COM端口在机器上。端口列表允许您选择控制板所连接的COM端口。
请根据您的机器固件配置选择正确的连接波特率(默认为115200)。
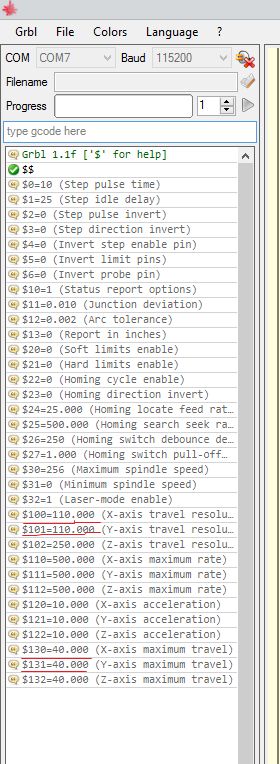
Grbl设置:
$$ - 查看Grbl设置
要查看设置,请键入$$并按Enter键连接到Grbl后。 Grbl应该响应当前系统设置的列表,如下面的示例所示。所有这些设置都是持久性的,并保存在EEPROM中,因此如果断电,这些将在下次启动Arduino时加载回来。
$ 0 = 10(步进脉冲,usec)
$ 1 = 25(步进空闲延迟,毫秒)
$ 2 = 0(步进端口反转掩码:00000000 )
$ 3 = 6(方向端口反转掩码:00000110)
$ 4 = 0(步进使能反转,布尔)
$ 5 = 0(限制引脚反转,bool)
$ 6 = 0(探针反转,布尔)
$ 10 = 3(状态报告掩码:00000011)
$ 11 = 0.020(结点偏差) ,mm)
$ 12 = 0.002(弧度公差,mm)
$ 13 = 0(报告英寸,布尔)
$ 20 = 0(软限制,布尔)
$ 21 = 0(硬限制,布尔)
$ 22 = 0(归位周期,布尔)
$ 23 = 1(归位dir反转掩码:00000001 )
24美元= 50.000(归位进给,毫米/分钟)
25美元= 635.000(寻找寻找,毫米/分钟)
26美元= 250美元(归巢反弹) ,msec)
$ 27 = 1.000(归位拉脱,mm)
$ 100 = 314.961(x,步长/mm)
$ 101 = 314.961(y ,step/mm)
$ 102 = 314.961(z,步长/mm)
$ 110 = 635.000(x最大速率,mm/min)
$ 111 = 635.000(y最大速率,mm/min)
$ 112 = 635.000(z最大速率,mm/min)
$ 120 = 50.000(x accel,mm/sec ^ 2)
$ 121 = 50.000(y accel,mm/sec ^ 2)
$ 122 = 50.000(z accel,mm/sec ^ 2)
$ 130 = 225.000(x max travel ,mm)
$ 131 = 125.000(最大行程,mm)
$ 132 = 170.000(z最大行程,mm)
步骤15 :调整系统
这是项目中最困难的部分
- 将激光束调整到工件上可能的最小点。这是最棘手的部分,需要使用跟踪和错误方法的时间和耐心。
- 以100美元,101美元,130美元和131美元
我对GRBL的设置是,
$ 100 = 110.000
$ 101 = 110.000
$ 130 = 40.000
$ 131 = 40.000
我尝试雕刻一个40mm边的正方形,经过这么多的误差和调整grbl的设置后,我从X轴和Y轴刻出了正确的40mm线。如果X轴和Y轴的分辨率不同,则图像将向任一方向缩放。
请记住,并非所有步进电机都与DVD驱动器相同
它很长这个过程非常耗时,但调整结果非常令人满意。
LaserGRBL用户界面
连接控制:在这里你可以选择串口和根据grbl固件配置,适当的连接波特率。
文件控制:显示加载的文件名和雕刻过程进度。绿色的“播放”按钮将开始执行程序。
手动命令:您可以在此处键入任何G代码行,然后按“输入”。命令将排入命令队列。
命令日志和命令返回码:显示入队命令及其执行状态和错误。
点动控制:允许手动定位激光。左侧垂直滑块控制移动速度,右侧滑块控制步长。
雕刻预览:此区域显示最终工作预览。在雕刻过程中,一个小的蓝色十字将在运行时显示当前的激光位置。
Grbl复位/归位/解锁:此按钮向grbl板提交软复位,归位和解锁命令。在解锁按钮的右侧,您可以添加一些用户定义的按钮。
Feed hold and resume:此按钮可以暂停和恢复程序执行,将Feed Hold或Resume命令发送到grbl board。
行数和时间投影:LaserGRBL可根据实际速度和作业进度估算程序执行时间。
覆盖控件的状态:显示并更改实际速度和功率覆盖。覆盖是grbl v1.1的新功能,旧版本不支持。
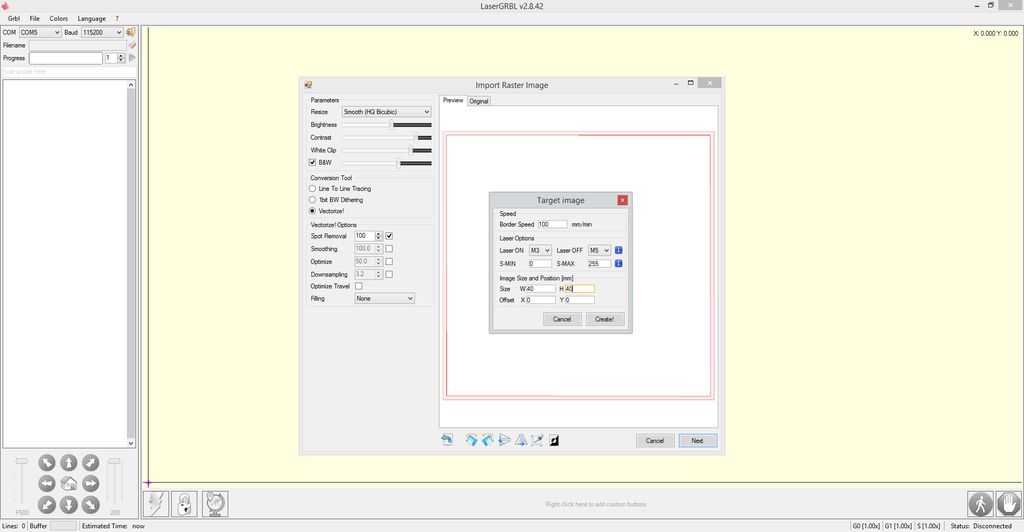
步骤16:木雕
光栅导入允许您在LaserGRBL中加载任何类型的图像并将其转换为GCode指令无需其他软件。 LaserGRBL支持照片,剪贴画,铅笔画,徽标,图标,并尝试使用任何类型的图像。
可以通过选择类型的图像从“文件,打开文件”菜单中调用它jpg,png或bmp
所有材料的雕刻设置都不同。
定义每毫米雕刻速度和质量 - 线mm
视频附加是整个过程的延时。
步骤17:薄纸切割
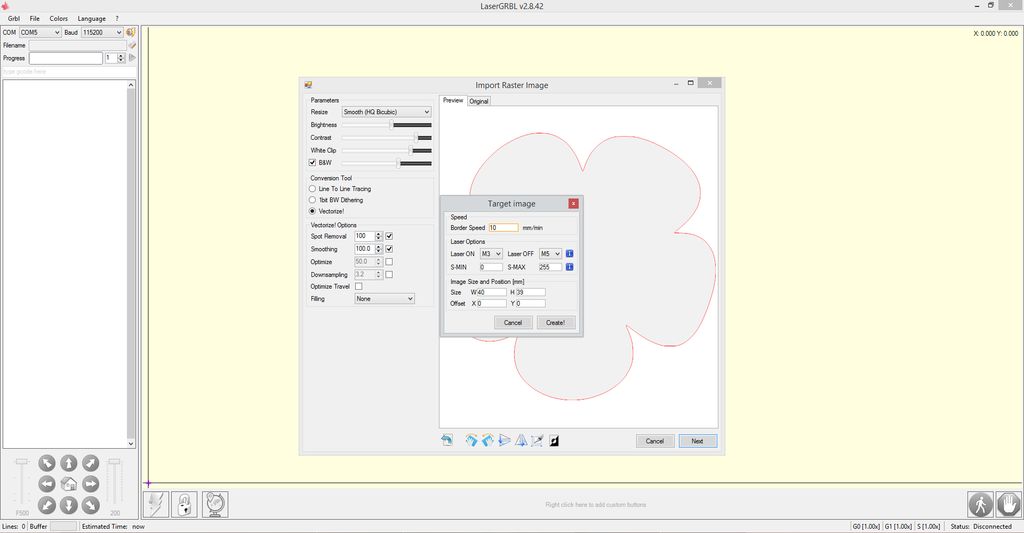
这款250mW激光还能够切割薄纸,但速度应该非常低,即不超过15mm/最佳和激光束应该适当调整。
视频附加是整个过程的延时。
步骤18:乙烯基剪切和制作自定义贴纸
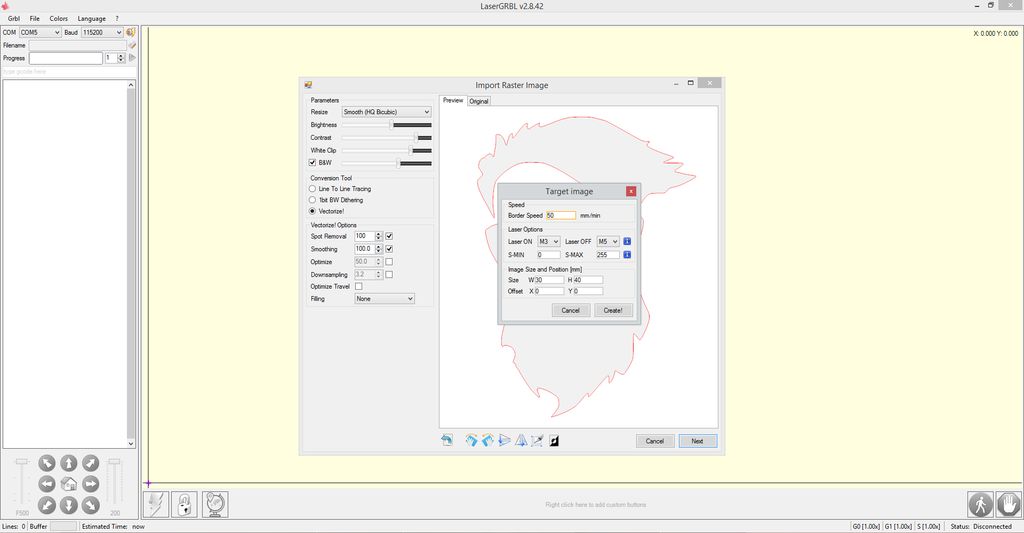
我做了一些定制乙烯基贴纸。相对于所用乙烯基的颜色,边界速度会发生变化。
深色可以轻松使用,而较浅的颜色则有些棘手。
以上图片演示了如何使用CNC制作的乙烯基贴纸。
责任编辑:wv
-
切割机
+关注
关注
4文章
298浏览量
18826 -
Arduino
+关注
关注
188文章
6478浏览量
188215 -
激光雕刻机
+关注
关注
8文章
32浏览量
15165
发布评论请先 登录
相关推荐
激光切割机和激光切管机在金属加工应用领域的区别

金属激光切割机的功率选择多少比较好?
一文解析激光切割机工业连接器解决方案!

激光切割机用上的连接器有何特点?解析YM系列工业级连接器






 工商网监
工商网监
评论