 喂鱼器的制作教程
喂鱼器的制作教程
步骤1:木制品

这台机器主要是用木制零件制造的。在进行原型设计时,我喜欢使用木材,可以更换零件,尺寸可以更改,公差可以达到0.1mm,可以添加或填充孔。附件是模型,您可以用木头制作它或者您可以打印它。
为了测试木制部件的几何形状,使用轻木。这种材料太软,不能用于喂鱼器。使用材料:
桦木胶合板500x250x1.0mm
桦木胶合板500x250x1.5mm
桦木胶合板500x250x2.0mm
桦木胶合板500x250x3.0mm
18mm胶合板
12x18mm桃花心木
步骤2:木制外壳





参见模型(01套管)
套管内置机械鱼饲养者。它保护机器和电气部件免受水族箱的潮湿。环氧树脂外壳部分适合Juwel Easy Feed的标准Juwel水族箱进料孔。 Fish Feeder的顶部位于水族箱盖的顶部。
用环氧树脂制作外壳的选择是因为:
环氧树脂具有防水性。
可以目视检查内部结构。
站在水族箱前面时,只有抬起盖子才能看到喂鱼器。
为了使套管顶部不太明显,我画了它是黑色的。
为透明环氧树脂外壳涂上4x L型材。
外壳的底部是环氧树脂盒外壳(透明环氧树脂盒外壳)。
制作外壳后应钻底孔。
制作外壳后应钻电连接器孔。 (未绘制,未决)。
必须除去环氧树脂外壳的多余材料并研磨至所需高度。
底壳的沙顶。在顶部和底部之间需要一个小间隙。安装零件需要很小的压力。
在环氧树脂胶合到套管之前,应涂上顶部。
用机器验证2x2和10x2的厚度。
步骤3:木工盖和舱口



参见型号(02 Cover&04 Hatch)
盖子滑入外壳顶部。盖子有一个方孔。当滑入机壳顶部时,机器被覆盖,筒仓可以进入。舱口滑入盖子。向料仓添加饲料时,只需清除小部件。为了增加盖子的抓地力,在顶板上钻一个孔。
将零件锯成所需的尺寸。
粘贴2个组件。
使用外壳安装组件。
绘制装配体。
步骤4:木工内件





参见模型(03内部)
内部木制品用于饲料的料仓,线性执行器,刀阀,EL板,开关和红外光栅。除非另有说明,否则确保零件准确且直角胶合。完成并安装好所有部件后,将其滑入外壳中。
在堆叠轴承孔的情况下钻孔,以获得完美的孔对齐。
涂上环氧树脂后,轴承孔较小。再次钻孔。使用一些轻微的压力将轴承压入位置压力。
制造其他木制部件。
胶水组装led框架。用环氧树脂涂料。在机器内部时,某些区域难以涂漆。
涂上环氧树脂后,孔越小。检查红外线LED和红外光电二极管是否适合孔。如有必要,再次钻孔。
绘制内部构件和框架作为单独的程序集。
使用刀阀检查尺寸以确保紧密配合。
3.5mm胶合2mm和1.5mm板材。
步骤5:Knifevalve




参见模型(05 Knifevalve)
考虑提交食物的几种方案,见第一表:
带舱口阀的旋转容器。要做到这一点并不容易。
螺丝(钻头)。喂食器位于水族箱内,正好位于水位之上。螺杆中的食物会暴露在潮湿环境中。食物会粘在螺丝上,堵塞输出。
刀阀(滑动)
刀阀系统如何工作?
步骤0 :阀门的正常位置。这是机器处于非活动状态时阀门的正常位置。食品容器阀门关闭。水族箱阀门关闭。
步骤1 :食物阀正在移动以获得一批食物。注意食物阀孔直径较小。这是为了确保水族箱阀门能够移动整批产品。
步骤2 :食物阀已装入并正在移动到光栅。
步骤3 :食物通过光栅落下并进入水族箱阀门。水族箱阀门正在向出口移动。
步骤4 :食物通过出口落入水族箱的水中。水族箱阀门向后移动,使机器关闭。
步骤6:木工刀具








参见模型(05 Knifevalve)
顶刀阀的孔径为8mm,底刀阀的孔径为10mm。
检查厚度,使用模具将阀门环氧树脂涂到合适的厚度。
在合适的厚度下,使用Commandant M5(刮除器)使滑动面光滑。
黄铜螺母粘在方形10x10 L = 15块上。直径约7mm。安装螺纹杆,黄铜螺母和刀阀后,将黄铜螺母粘在刀阀上。小心不要在线上洒上环氧树脂。
当黄铜螺母被胶合时,用更多环氧树脂填充螺母和块之间的间隙。
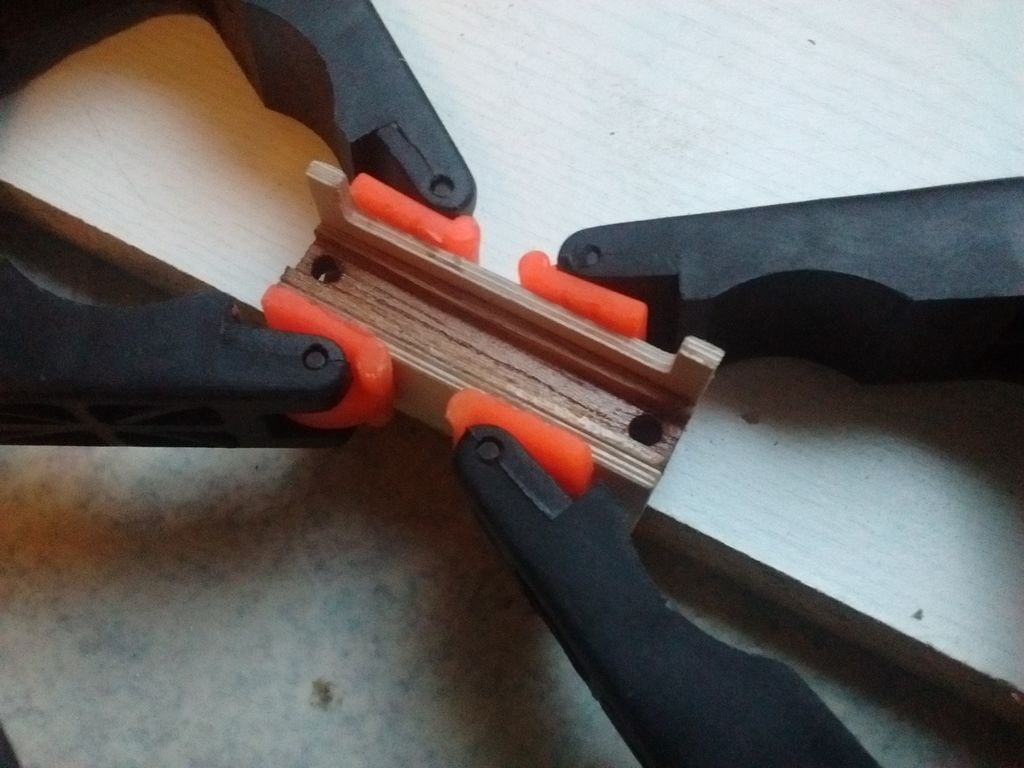
步骤7:木工电机夹具和支撑





参见模型(06 Motor Clamp&Support)
电机夹和支架用于定位步进电机。当步进电机被夹紧时,轴是唯一的旋转部件。
电机支架用于内部组件并粘在机器内部。将电机支架与步进电机对准,以便完美贴合。
电机夹是一个松动的部件,用螺栓固定在机器的内部。
为了确保电机支架和电机夹是完美的配合,这两个部件应由1件18mm胶合板制成。要钻孔,请使用立柱钻孔机。这些孔应完全垂直。
制造:
钻大ø20孔。
钻小孔。
看到夹具和支撑的轮廓。
将电机夹减薄至10mm。
步骤8:电子设备
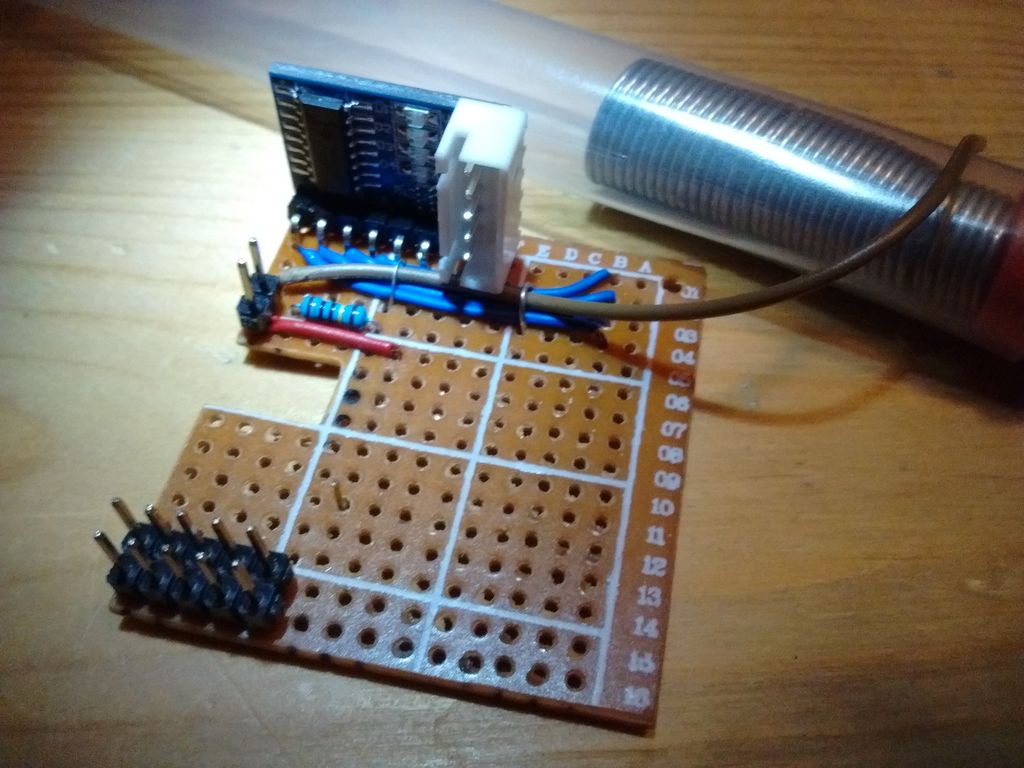



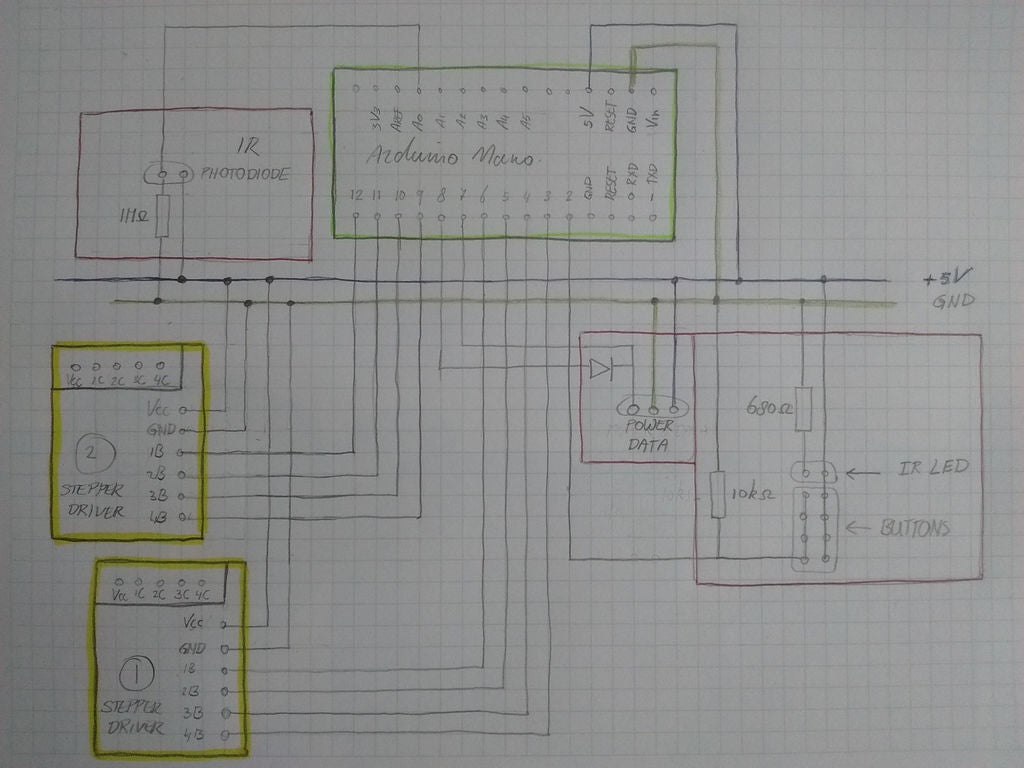
参见模型(99 El-board)
参见原理图:perfoboard有一个连接器,为+ 5V导轨和GND导轨供电。第三个引脚是数据线。这些引脚连接到行星板上的大脑:Arduino nano。始终确保引脚和Arduino上电源线的正确极性。为避免Arduino数字引脚数据输出电压,引脚受二极管保护。 Arduino从数据线读取命令,通过驱动器控制阀门步进电机,检查开关和IR光电门。
零件:
1x Perfoboard 43x39mm
1x Arduino nano
2x ULN2003 mini
1x二极管(例如1N4148)
1x电阻器1M
1x电阻器10k
1x电阻680
1x 2针公头(光电二极管)
1x 3针公头(电源,数据,接地)
2x 5针公头
电线
还需要一些工具:镊子,刀具,虎钳,烙铁,灯芯,支架。
如何焊接:https://learn.adafruit.com/adafruit-guide-excelle 。..。注意安全风险并使用个人防护设备。
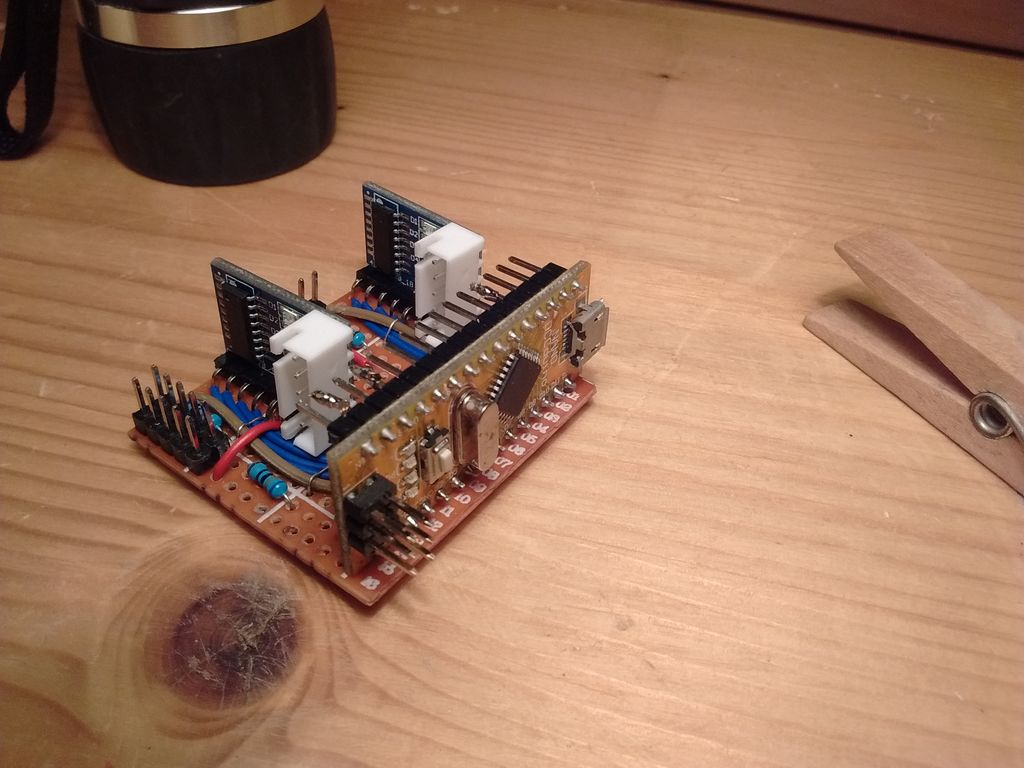
制造:
将钻孔板锯成所需尺寸。
弯曲步进驱动器和Arduino的引脚。小心点!
切断第一个步进电机驱动器的(蓝色)线。将导线放置到位,参见图纸,将针脚步进电机4B连接到Arduino D12,3B到D11,2B到D10,1B到D9。将驱动器按压到位,焊接接头步进驱动器4B,3B,2B,1B。不要焊接GND和VCC。
在N5和N6处添加IR光电二极管的连接器。 N5到Arduino A0的引脚。接线电阻1M至N5和J5。用红线将N6到I6的引脚固定。
切断第二步进电机驱动器的(蓝色)导线。将导线放置到位,参见图,将针脚步进电机4B连接到Arduino D6,3B到D5,2B到D4,1B到D3。将驱动器按压到位,焊接接头步进驱动器4B,3B,2B,1B。不要焊接GND和VCC。
在J15到K16添加开关的连接器。在N14到N15,M15,L15,K15的导线电阻10K,将其他导线连接到J14。将N14连接到Arduino D2。
在J15和J16添加LED连接器。 H15至J15的导线电阻器680将另一导体导线连接至E15。
在D5到7处添加数据连接器 - + 5V - GND。从B5到D5的Arduino D8连接二极管。将Arduino D7连接到B6到D5。
添加电源轨+ 5V和GND线。
按下并将Arduino焊接到位。
焊接连接。
从底部去除多余的材料(针脚)。
在裸线上涂抹环氧树脂。
测试(参见示意图和程序及视频Fish Feeder 2测试电子设备):
将按钮,IR LED,IR光电二极管连接到perfoboard,将测试程序上传到Arduino。
通过在LED和光电二极管之间滑动一张纸来测试红外门的感光度。
按下按钮测试按钮和驱动程序。
步骤9:步进电机



参见型号(98 Linear Actuator,98 Linear Actuator.step,98 Linear Actuator.pdf)
参见线性执行器步进电机
步进电机移动阀门。向右转动将阀门拉向电机并关闭阀门。向左转动将阀门推到打开位置。为了确保最佳功能,阀门,车轴,轴承,联轴器和电机必须完美匹配。
一个步进电机控制筒仓刀阀。另一个步进电机控制套管刀阀。
零件:
M5不锈钢螺纹
M5螺母
接地连接器
滚珠轴承内径Ø5mmMF105ZZ 5x10x4
步进电机20BYJ46轴Ø5mm,平面。
收缩管
安装步进电机
将轴承压入轴承孔(压入配合)。
定位刀阀。
在轴承中插入“非电机侧”的螺纹。
在螺纹“非电机侧”上插入螺母。
将螺纹插入黄铜螺母刀阀。
在“电机侧”的螺纹上插入螺母。
将螺纹插入“电机侧”的轴承中。
插入耦合“接地连接器”。
将支架上的步进电机插入联轴器。
使用电机夹夹紧步进电机
定位螺母,顺时针旋转一个,逆时针旋转一个,使位置永久。
将El-board插入隔间。
从步进电机线上取下白色插头,不要取下金属导线。
将步进电机连接到驱动器。使用收缩管以避免短路。
使用测试程序“20171210测试ULN2003 serialread 2 steppermotors.ino”来检查正确的对齐步进电机,轴,轴承和阀门。打开计算机和Arduino之间的串行线。使用键盘,键“2”,“3”,“5”,“6”移动阀门。
为套管添加孔。见木工套管和阀门。
步骤10:电源和数据输入









参见模型(97 Power Data Plug插座,97电源数据插头Socket.step,97电源数据插头Socket.pdf)
此电缆为电子设备提供电源并提供数据线。环氧树脂和O形圈应提供防水连接。
零件:
经典自行车(Dunlop)阀门(见https://en.wikipedia.org/wiki/Dunlop_valve)
2x阀门螺母
M8垫圈
O形圈ø7-ø15
3.5mm耳机3极插头
6.35mm 3极插头
ø6电线(棕色,蓝色,绿色/黄色0.75mm2)
3.5mm tubestyle 3极插头螺母
收缩管
环氧树脂
制造:
从阀杆上取下橡胶。
移除3.5毫米音频插头的螺纹部分。
滑动电缆上3.5mm插头的背面。
在电线上滑动阀杆。
将电线的导线切成一定长度,见表“尖端,环和套管”。
焊接导体至3.5mm插头。
使用收缩软管和环氧树脂进行防水连接。
将阀杆滑动至3.5mm插头。
焊接导线至6.35mm插头。
将焊线连接至3.5mm管式插座。
在套管中添加螺母孔。
在外壳中使用环氧水密的胶水螺母。
按照图纸锯木制零件。
将木制部件粘到内部。使用3mm和2mm填充板。
步骤11:光隔离单线通信



参见光隔离单线通信
由于鱼饲养器可能存在潮湿问题,我希望在外界和鱼饲养器之间隔离数据和电源在水族馆里面。
光学单元的一侧有四根电线。这一面与外界联系在一起。四根线连接到Arduino或Raspberry PI的电源,接地,数字引脚(数据输入),另一个数字引脚(数据输出)。这个Instructable使用Arduino和PC作为主设备。
另一侧有一个独立的电源连接到电源插座。数据和电源通过连接到6.3mm 3极音频插座的电源和数据线传输。电源线和数据线在另一侧连接到Fish Feeder内部的3.5mm插座,El-board和Arduino nano作为从属设备。
部件:
电源+ 5V
插座电源
Perfoboard 5x7cm
2x电阻470Ω
1x电阻680Ω
2x电阻1kΩ
2x二极管(例如1N4148)
2x光耦器EL817
LED
引脚插头母2脚
针头母头3针
针头母头4针
圆头母头6针
圆头母头4针
6.35 mm音频3极插座
塑料外壳
制造:
焊接电路符合指示。
参见原理图,连接GND外部和+ 5V外部电源插座。
根据尖端,环形和套管布局电缆,参见原理图,连接+ 5V2,GND2,数据输入/输出到6.35mm 3极音频插座。
参见原理图,将面包板线连接到IN,GND1,OUT和+ 5V1。
在套管中钻孔。
在套管中安装插座。
使用绑带修复面包板线。
步骤12:内部电器





此步骤包含一些小型硬件部分。请注意,某些部件没有按预期运行,因此这些部件会更新。
零件:
IR led
红外光电二极管
电线
耳机线
Shrinkhose
4x SDS004
4x传感器/开关安装板
耳机插孔
耳机插座(3.5mm,3导线),见步骤10,是一种典型的管式插座,带有用于面板安装的螺纹端。将插头转入外壳时,插头开始插入插座。在一定量的转动之后,插头应该完全连接到插座。当测试插座开始随插头转动时。实现了良好的联系。缺点是连接到插座的3根电线被扭曲并卡在EL板上。幸运的是没有任何损坏。我决定在插座的螺纹上做一个平坦的表面,在插座的安装板上做一个圆形的部分。
制造耳机插座:
提供一个平面至3.5mm管式插座。平坦表面应尽可能为方形。
使用1至1.5毫米的木条并开始将其呈圆形以填充间隙。确保它很合适。
将圆形段粘贴到插座孔安装板上。
用环氧树脂完成安装板。
将插座和安装板连接到EL板上。
IR Led
LED位于框架中,见图纸木工内件。 LED直接从EL板接收电源。当EL板供电时,LED有电并发出红外光。 IR导光板是红外光栅的一部分,参见可光刻的红外光栅。
制造红外光导:
焊料导向导线,长导红,短暂导致黑色。
添加收缩软管。
将连接器添加到电线。
插入外壳中。
连接EL板。
开关
开关用于限制线性执行器的运动。按下开关时,线性执行器应停止移动。
第一个设计有按钮。缺点是按下按钮(数字引脚“HIGH”)按钮无法进一步移动。这会给按钮,螺纹,螺母和步进电机带来压力。
经过搜索,我发现了C&K的一些便宜而简单的开关SDS004。您需要一个小的力将开关推到“ON”,引脚可以进一步移动并且仍然是“ON”,请参见数据表中的超行程。可以在Mouser.com上找到此开关。在内部添加一个支撑以定位开关,它可以触及阀门上的凹口,参见图纸。
在此设置中有4个开关。我订购了一些。开关非常小。在第一次尝试时,将耳机线焊接到开关,我完全炸掉了开关。使用耳机线是因为线的股线是绝缘的。没有外部橡胶的裸线非常薄,可以穿过红外光栅孔。
要在开关耳机线之间建立良好的连接,需要准备耳机线。耳机线上的着色是绝缘。这可以通过打磨或燃烧来消除。通过镀锡烙铁并在烙铁和木质表面之间按压电线,绝缘材料将被烧掉。慢慢来,当焊料向上流动时你就可以了。在施加焊料之后,镀锡线可以弯曲成U形。这可以挂在开关的引脚上。重新熔化焊料,以便与开关牢固连接。
制造开关:
环氧胶检测器支持,见图纸
使用耳机线(隔离线股)。
按下电线上的焊铁,等待电线日晒开始融化。
在焊丝上涂抹焊料。焊料流入电线。
将电线的镀锡部分弯曲成U形。
将U形连接到交换机的连接器。
使用烙铁将镀锡线熔化到连接器上。
用万用表检查关节。
将耳机线穿过红外光栅孔。
添加收缩软管。
将连接器添加到电线。
胶水传感器就位(不要使用环氧树脂,这会流入传感器)
将连接器连接到EL板。
IR光电二极管
光电二极管是红外光电探测器的另一部分。它也位于框架中,见图纸木工内件。它位于红外线的对面
当食物通过红外线时,它会干扰光束。这由IR光电二极管检测,参见IR Photogate。 IR光电二极管以反向偏压模式连接。
制造光电二极管:
焊料导向导线,短导红色,长导黑色。
添加收缩软管。
将连接器添加到电线。
将光电二极管插入外壳。
连接到EL-Board。
步骤13:程序


当部件的制造准备就绪时,可以上传程序。
将master.ino上传到连接到PC和光路的Arduino。
slave.ino上传到FisFeeder 2内的Arduino nano。
上传程序时:
Connect送料器的电源/数据线。
将电源/数据线连接到光纤电路。
将Arduino连接到光纤电路。
将Arduino连接到PC。
在PC上打开Arduino串行监视器。
将电源连接到optcal电路。
现在Fish Feeder上线了。在PC串行监视器上读取通信。
运行设置和校准程序非常重要。
运行设置以确定阀门的反冲和位置。
运行校准程序,检查存储的值,并在必要时进行调整。
完成设置和校准程序后,值将永久存储在EEPROM。当鱼饲料器重新供电时,读取并重新使用存储的值。现在喂鱼器已经准备好喂鱼了。
编程已经可以使用了。您可以添加计时例程或其他选项。另请阅读Slave程序中的注释。
结论:大多数设计目标都得到了满足。与Raspberry的连接尚未准备好。目前,该系统具有功能性并经过耐久性测试。
-
Arduino
+关注
关注
188文章
6471浏览量
187215
发布评论请先 登录
相关推荐
了解和使用GNU Radio软件的功能并制作蓝牙抓包器
电源变换器的制作步骤包括哪些?
光刻掩膜版制作流程
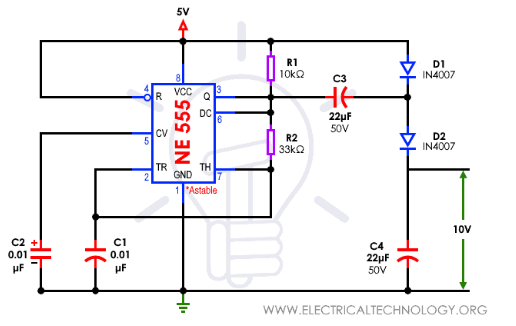
如何使用555定时器制作电压倍增器电路
PCB电路板设计与制作的步骤和要点
如何用Arduino制作一个简易自动喂鱼器
应用单片机开发的ST LINK调试器设计制作

解码高清视频编码器:为何它成为现代视频制作的关键






 工商网监
工商网监
评论