 无人机圈计时器的制作
无人机圈计时器的制作
第1步:准备
第2步:打印主基地
你需要首先打印主基地。我用黑色打印出来以匹配超声波传感器的颜色,你可以用你希望的任何颜色组合打印你的。也许在低光比赛中尝试在黑暗中发光?
步骤3:组装和连接超声波传感器

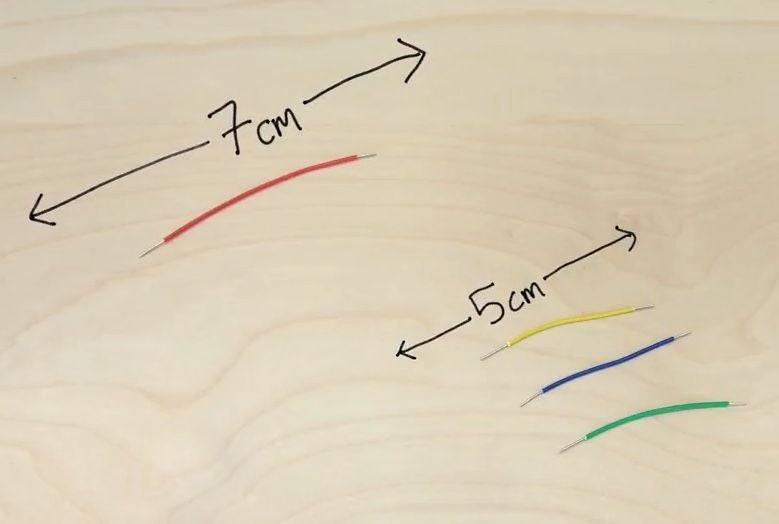
我在这个版本中使用五种颜色的线,黑色,绿色,红色,黄色和蓝色。如果你可以使用相同的颜色,那么你会发现它更容易跟随 - 但你仍然可以用一种颜色的线材来构建一个颜色。
首先切割一段7厘米长的红色和一个5厘米长,黄色,蓝色和绿色。
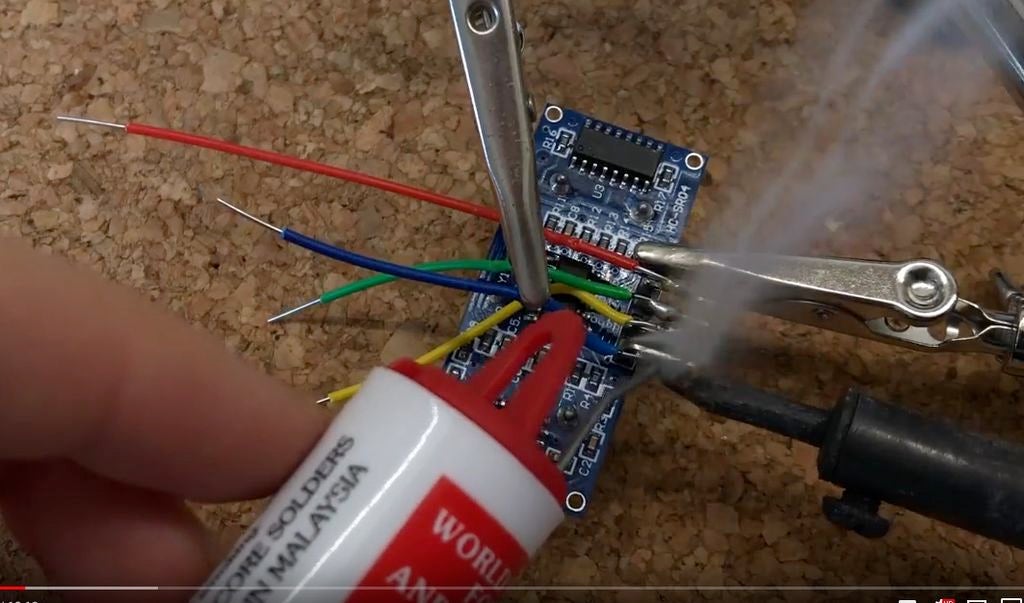
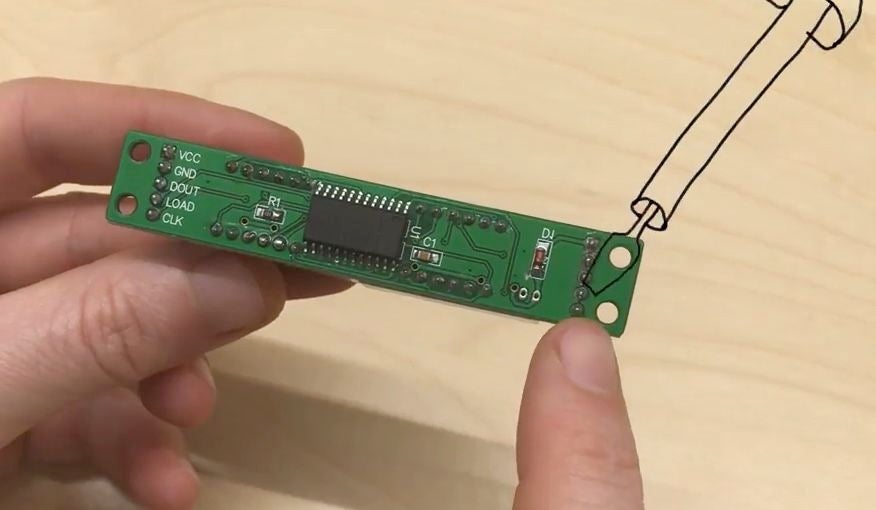
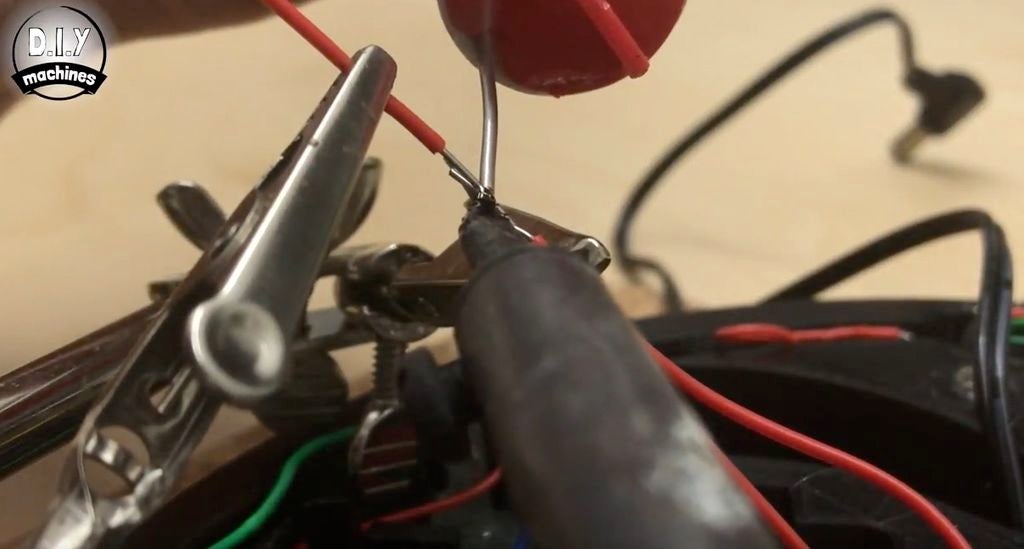
你需要按照正常方向将它们焊接起来(看看上面的图片,看看我的意思)。它们应按如下方式焊接:
红色 - 》 VCC
绿色 - 》 Trig
黄色 - 》 Echo
蓝色 - 》地面
完成后,您可以使用一些热熔胶将其粘合到位。
步骤4:连接电池座
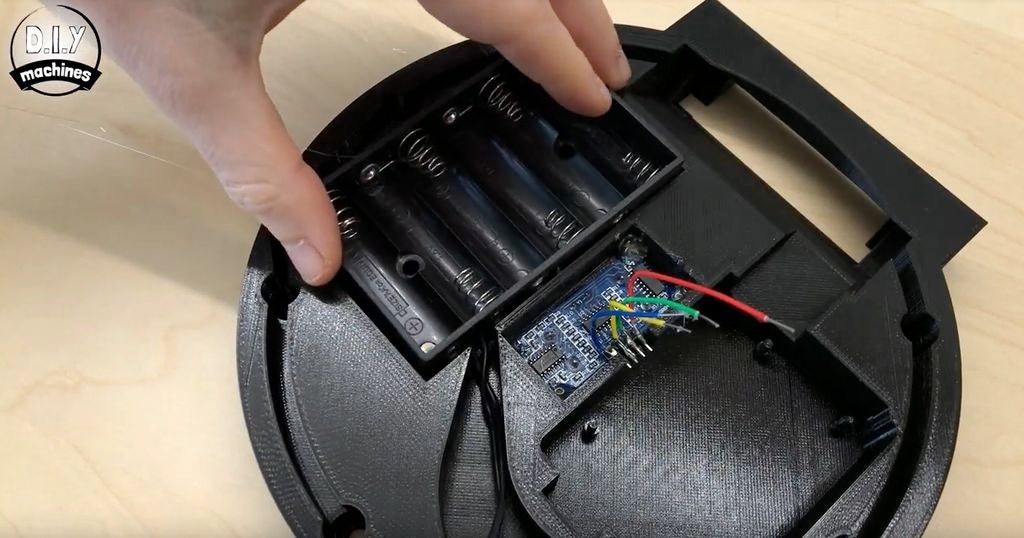
同时我们将胶枪加热,我们可以粘合放置电池座。
步骤5:组装显示器
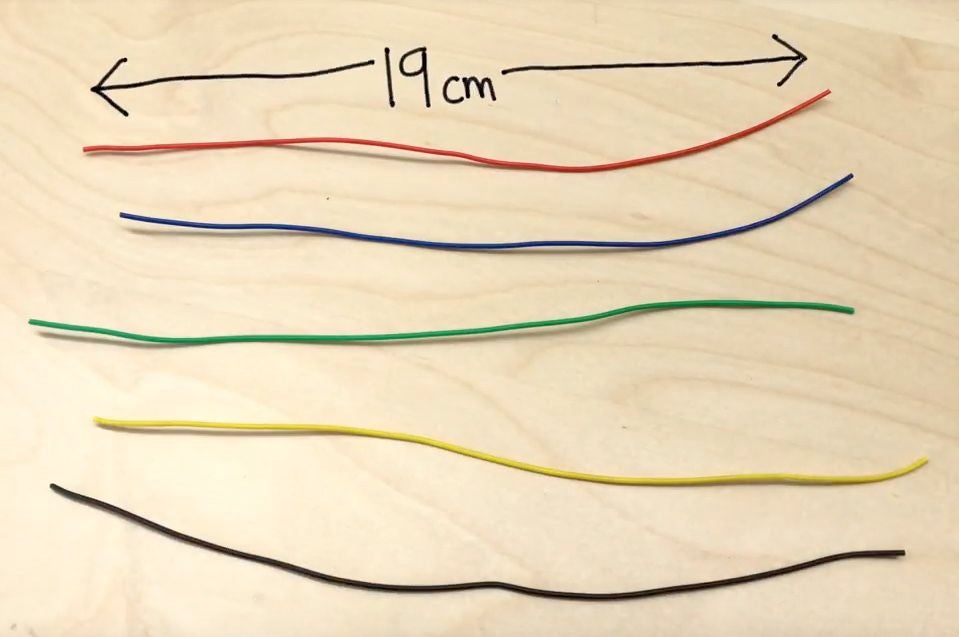

现在你需要5根电线,每根颜色切成19厘米长。你需要在每根导线的一端露出更多的一端,因为一端焊接到显示器上,而另一端则直接推入Arduino的接头,以减少所需的焊接量。
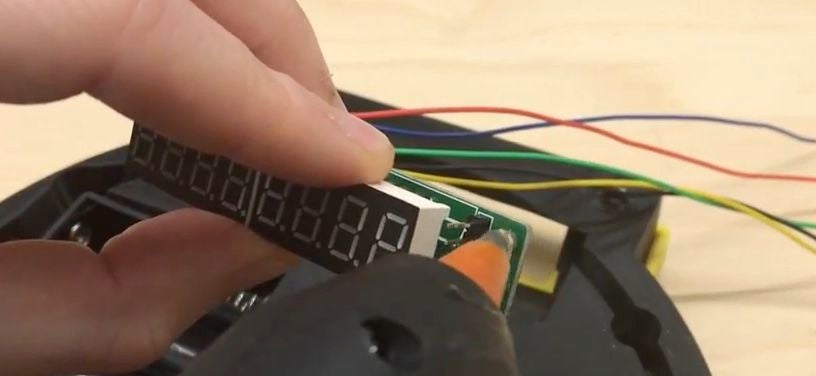
它们将焊接到显示器背面的点上,如第二张图片所示,使用第三张图片跟随哪种颜色焊接到哪个连接。
步骤6:连接屏幕及其屏蔽


接下来,打印屏幕的屏蔽。我选择用鲜黄色打印出来以与黑色对比,同时当你试图降落时也可以从无人机相机上看到它。你可以用更多的热熔胶来附上它。
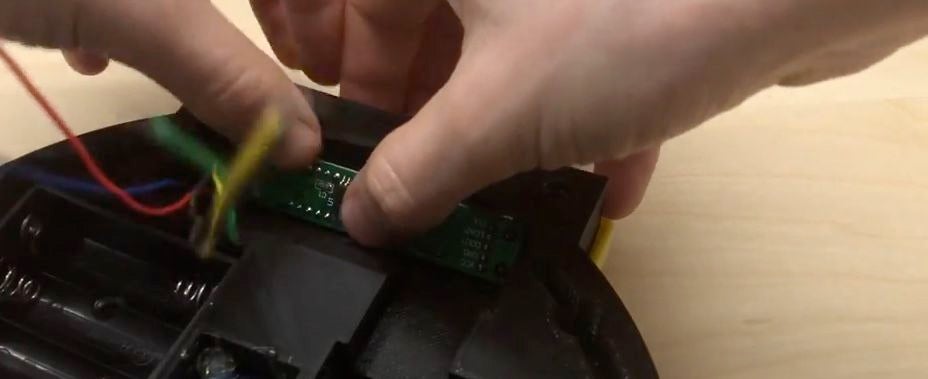
你也可以将七段显示器粘贴到位,这也是用可信赖的旧热熔胶枪完成的。在板的每个角上使用一点,然后从底座的下侧插入。确保当您翻转基座并从前面查看时,小数位于显示屏的底部 - 如果没有,那么您将要颠倒插入!
步骤7:准备绿色LED
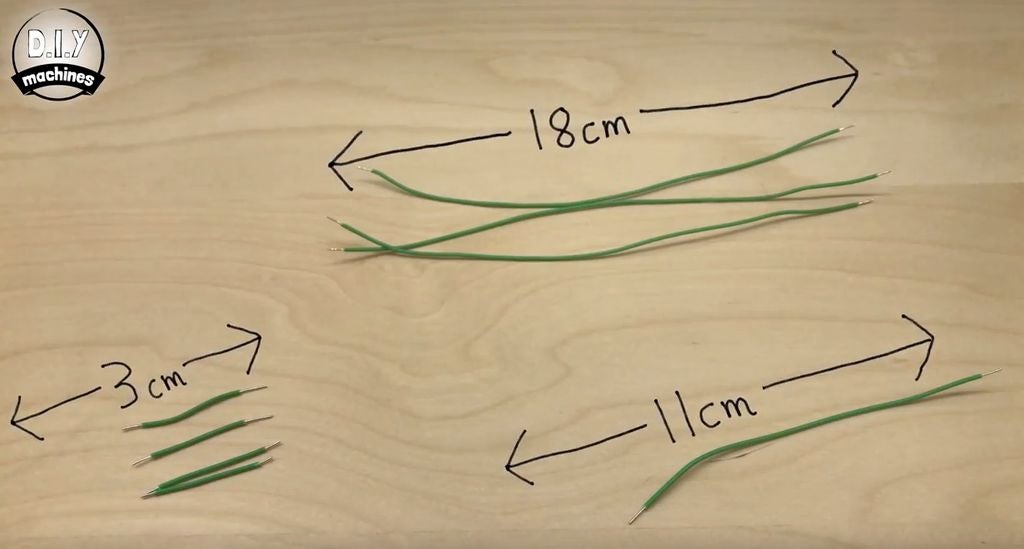
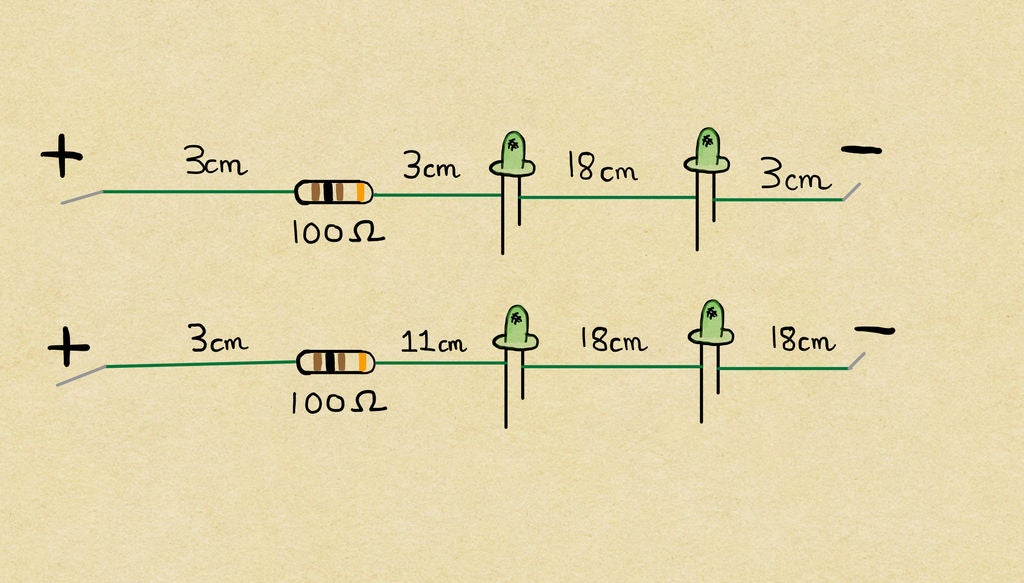
您现在需要以下电线连接LED和电阻来创建两串绿色LED:
18cm x3
3cm x x4
11cm x1
他们然后需要焊接四个绿色5毫米LED和两个100欧姆电阻。它们的颜色标记最后是棕色 - 黑色 - 棕色,然后是金色。
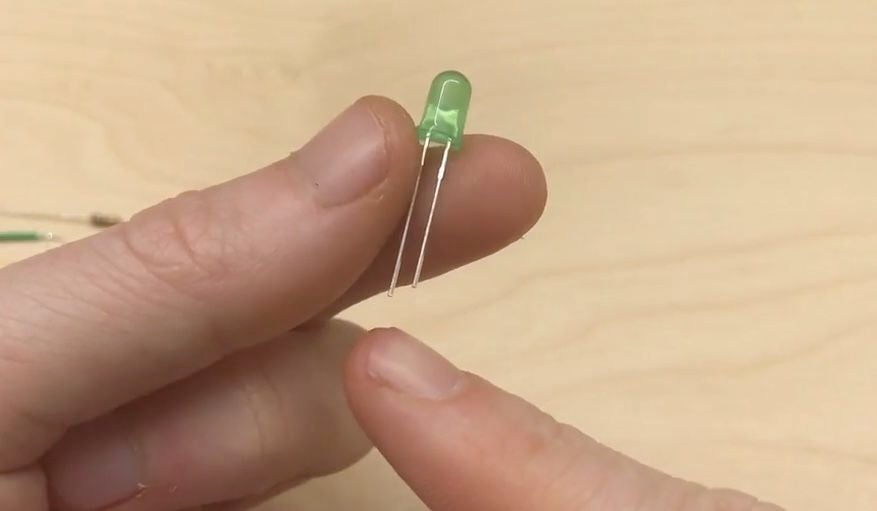
确保LED的正面(较长的腿)连接到电路的正极侧。由于电流只会通过LED单向流动,如果连接的方式不正确,它将无法工作。
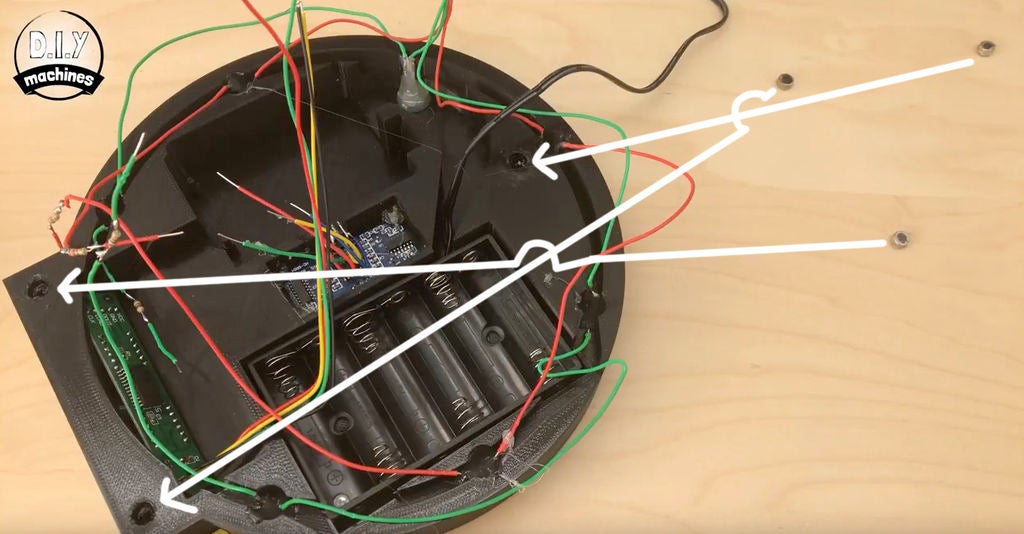
步骤8:连接绿色LED
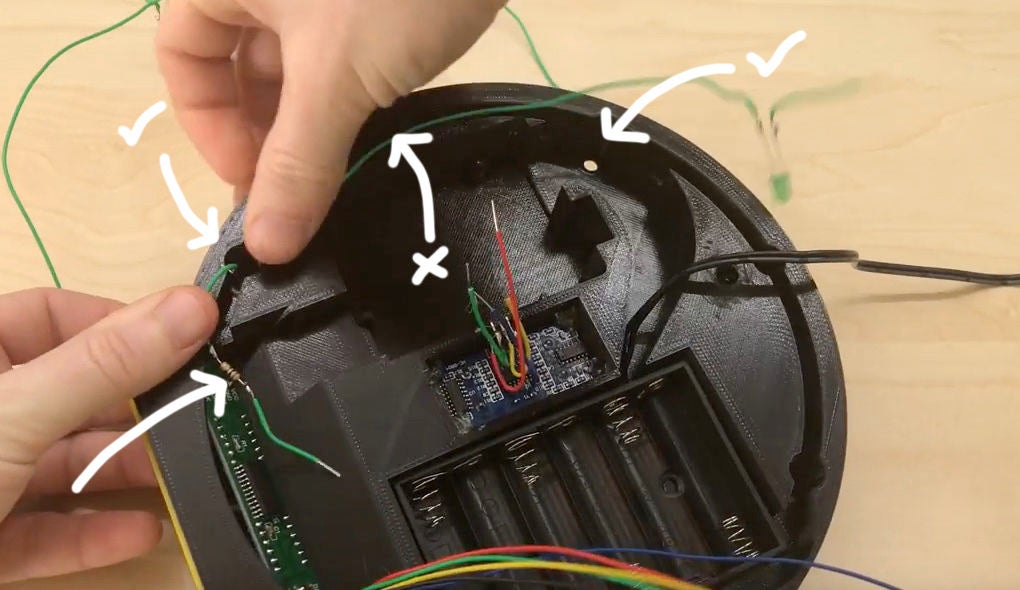

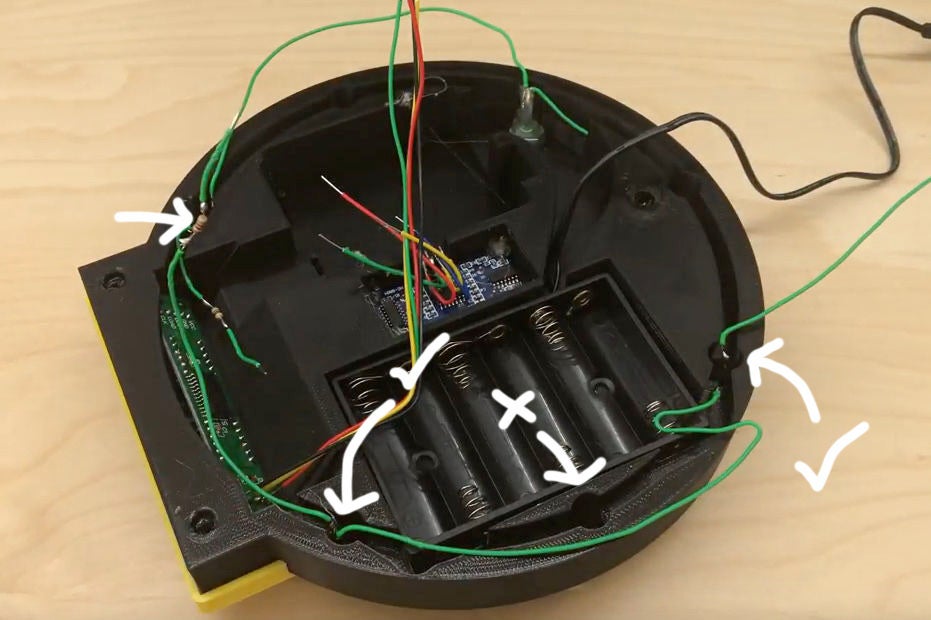
将它们焊接在一起后,我们将它们添加到主基地。确保带有电阻的导线末端最靠近显示屏,并将第一个LED推过显示屏周围顺时针方向的第一个孔。然后跳过下一个孔,然后推动第二个LED通过前进的孔。
然后你可以使用一些热熔胶将LED从后面固定到位,同时确保每个LED的两条腿不要t彼此接触并缩短电路。
对第二串LED重复相同的步骤,但这次从显示器逆时针走,如第三张图片。
然后再用我最喜欢的热熔胶回填LED。
步骤9:准备和连接红色LED
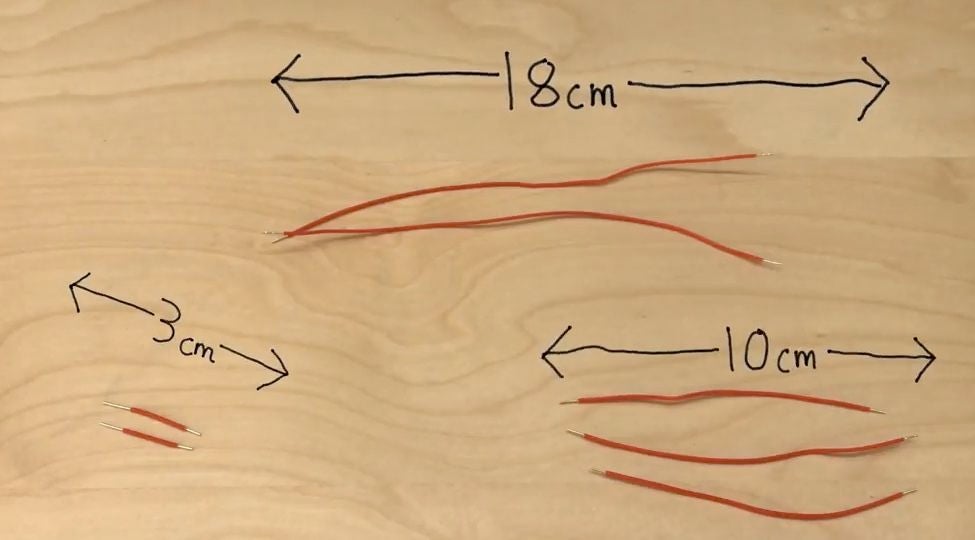
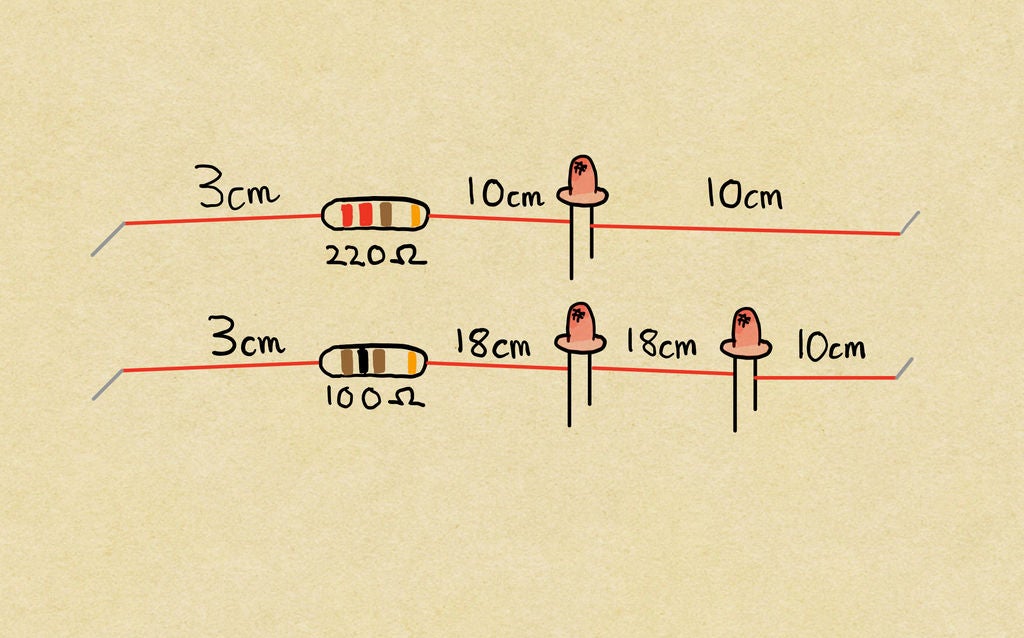
现在我们将研究红色LED,你需要准备另一组电线(见下文),3个红色LED,1 x 100Ohm电阻器和1 x 220欧姆电阻器。如原理图所示,再次连接它们。
18cm x2
3cm x2
10cm x3
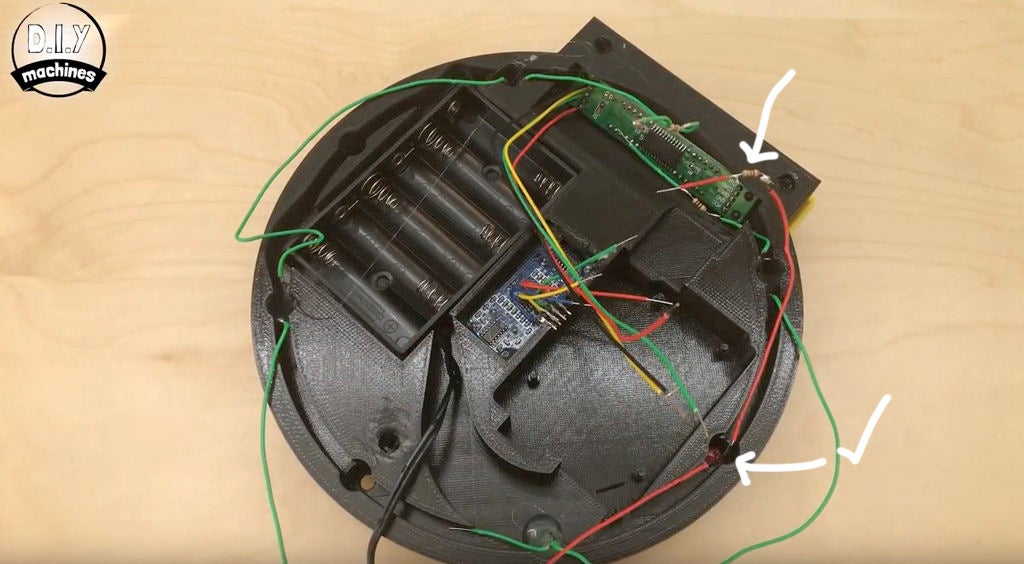
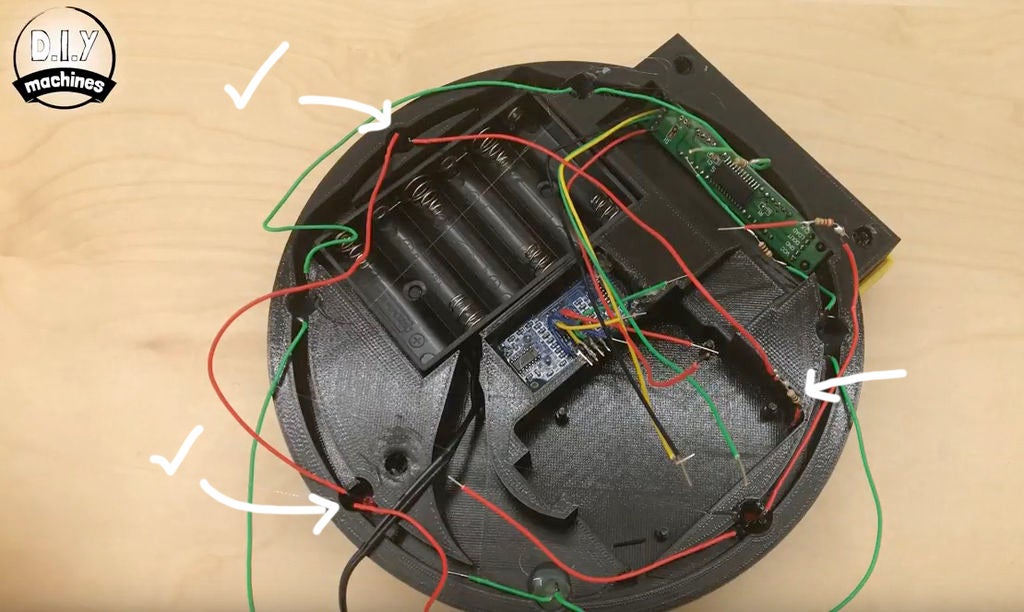
首先,我们将添加一个带有单个LED的字符串。当我们顺时针绕基座工作时,想要再次添加最靠近显示器的电阻器插入间隙。不要忘记添加一些胶水。
带有两个的字符串想要朝另一个方向转移。
步骤10:将磁铁添加到Base和Lid。


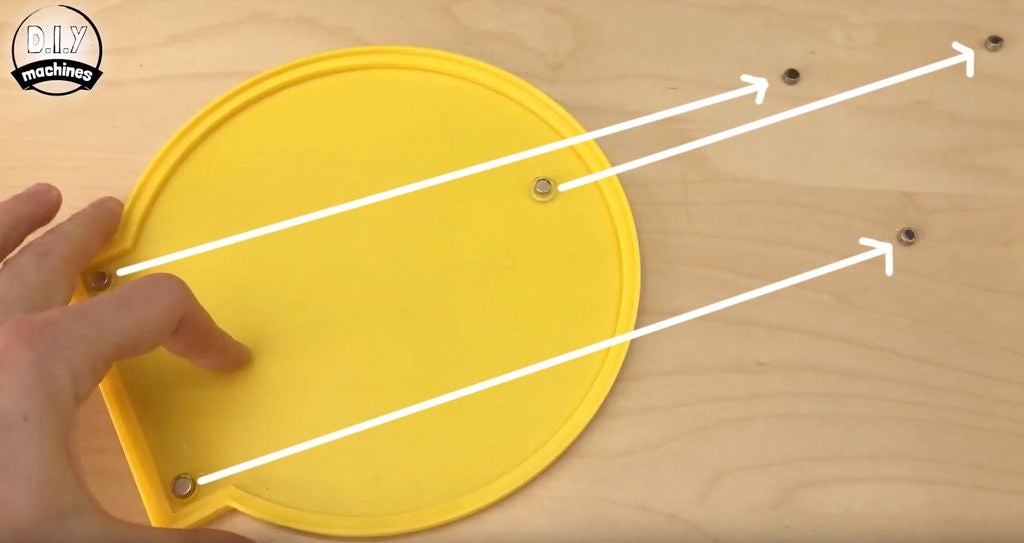
将三个钕磁铁粘贴到预先标记的三个印刷基座上位置。
在你粘上的三个磁铁的顶部,允许另外三个磁铁定位自己。然后用笔在每个上面放一个黑点,这样我们就可以记住它的极性了。
一旦标记它们就移除它们但保持它们的布局相同。
现在我们将它们粘在一起进入主基座,确保你注意两个最近的显示开关位置。我们还需要用我们之前制作的黑色标记将它们粘在一起。 (因此,当我们完成此步骤时,黑色标记将被埋入打印基座。)
步骤11:加入LED负端子

将我们先前粘在一起的LED灯串的四个负极端,并将它们全部焊接到一根地线上。我用了一条约5厘米长的蓝色线。这是他们都可以连接到Arduino上的单个接地连接。
步骤12:上传代码和位置Arduino
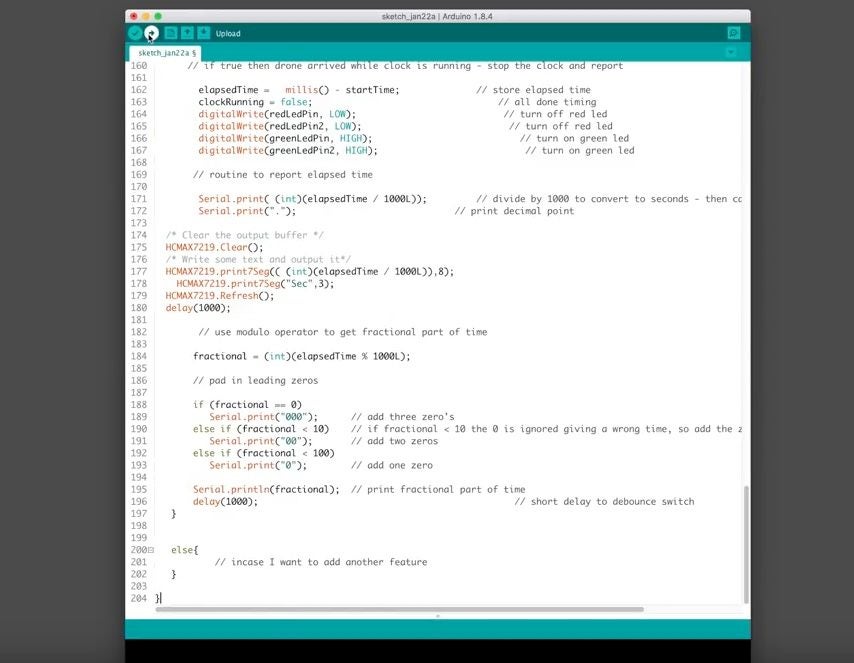
现在将Arduino Uno连接到您的计算机并上传您在本文末尾找到的代码。完成此操作后,您可以将其与计算机断开连接。
可从此处获取代码:https://www.electromaker.io/project/view/drone-landing-pad-with-arduino-计时器
你可以把Arduino放到它的休息处。有针脚穿过Arduino板上的螺丝安装孔。
步骤13:将超声波传感器连接到Arduino Uno
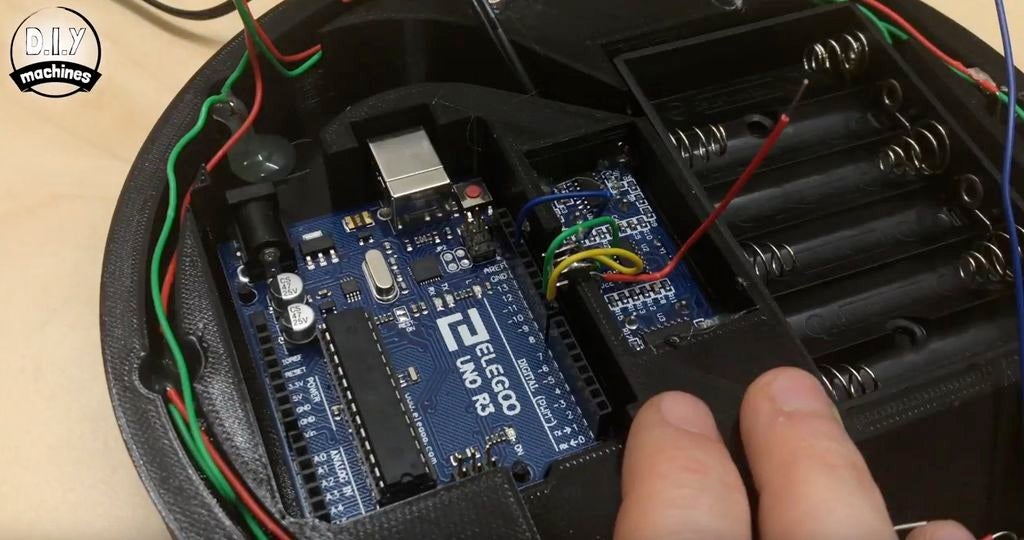
首先,我们将连接超声波传感器中的三根电线。按如下方式连接它们:
蓝色地线 - 》接地
绿色触发线 - 》针脚9
黄色回波线 - 》引脚8
红线将在以后连接。
步骤14:将LED连接线连接到Arduino Uno
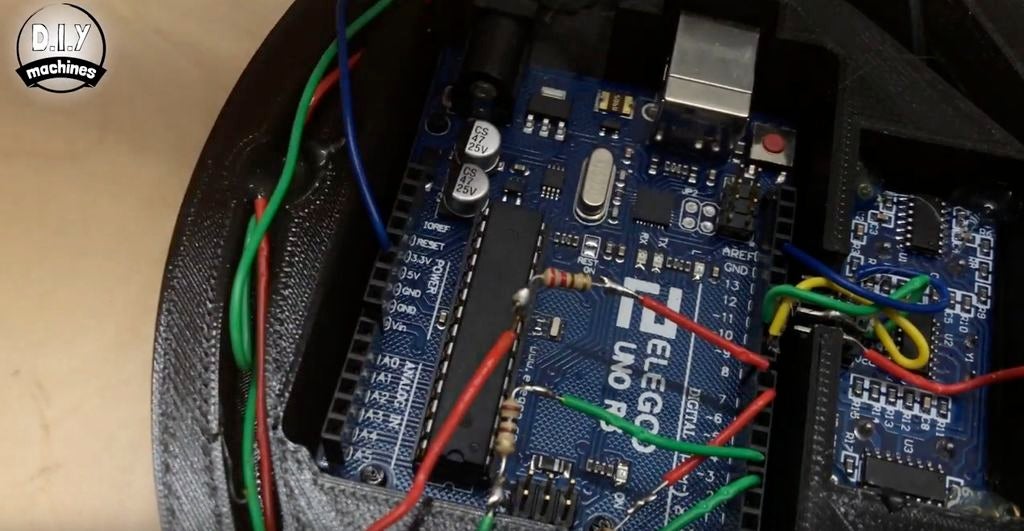
现在LED的导线连接如下:
蓝色地线 - 》接地
第一个绿色导线 - 》 Pin 3
第二根绿线 - 》第2针
第一根红线 - 》第6针
第二根红线 - 》第7针
步骤15:将电线从人机界面连接到Arduino Uno
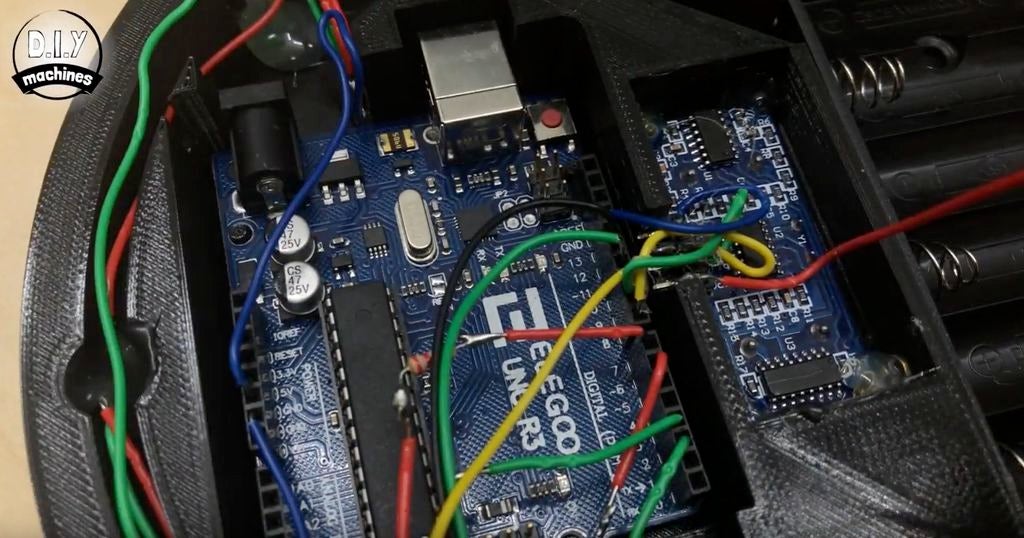
接下来是这样的显示电线:
灰色Clk电线 - 》引脚13
绿色DIN电线 - 》引脚11
黄色CS电线 - 》引脚10
Blue Grnd导线 - 》接地针
接下来将再次进行红色VCC导线。
步骤16:将VCC连接到5v
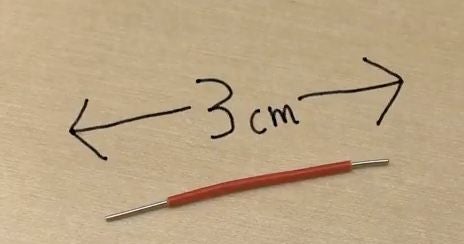

剪短3厘米长的电线。并用它将两个红色VCC线连接在一起形成超声波传感器和显示器。我们必须这样做,因为我们在Arduino板上只有一个5v电源。
现在我们可以在Arduino的5v连接中弹出它。
步骤17 :安装顶环

打印顶部环部件,并如图所示用一些热熔胶将其固定。
这部分不仅使设备看起来非常酷,它还会在垫子周围形成一个脊,这有助于落在他们腹部的无人机停在超声波传感器上方。
就是这样,瞧!添加一些电池,然后上天。 :)
第18步:完成!
-
计时器
+关注
关注
1文章
421浏览量
32735 -
无人机
+关注
关注
230文章
10454浏览量
180828
发布评论请先 登录
相关推荐
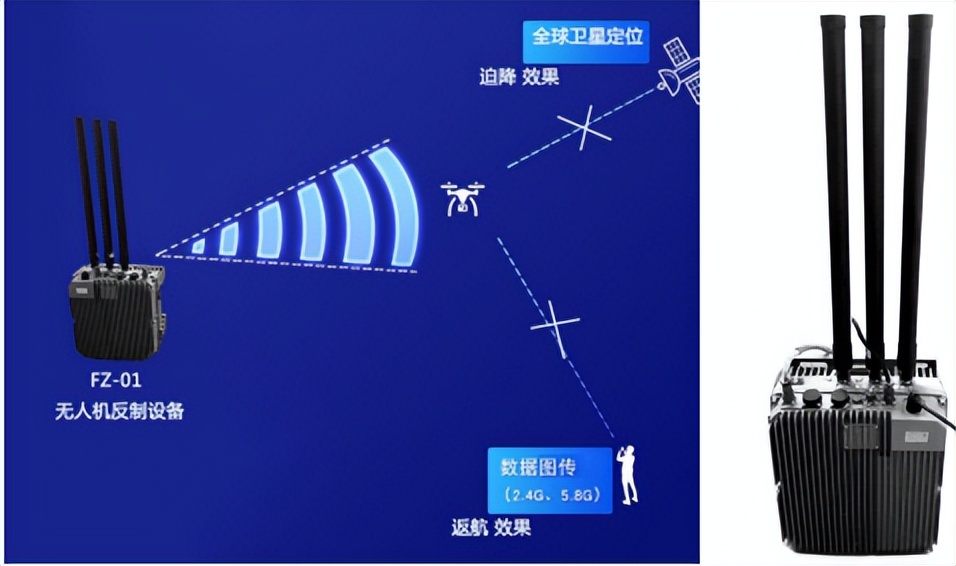
科技防线:无人机干扰系统如何保障空域安全 特信无人机反制
特信无人机反制设备 手持无人机探测器:精准定位,快速反制





 工商网监
工商网监
评论