 简易迷宫求解机器人的制作
简易迷宫求解机器人的制作
第1步:准备好你的组件
我使用了上面列出的所有组件:
1-2齿轮直流电机
2- 2轮
3- 1 custer wheel
4- LCD
5-面包板和一些电线(男性 - 男性)&&(男性 - 女性)
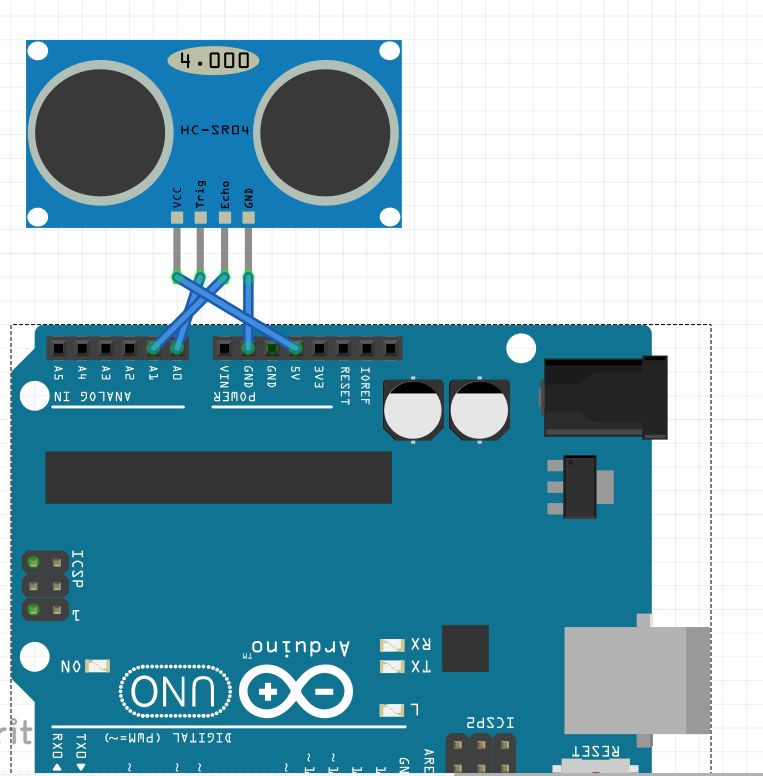
6-3超声波传感器
4-超声波支架
5- Arduino UNO板
6-2电池3.7 V带电池座
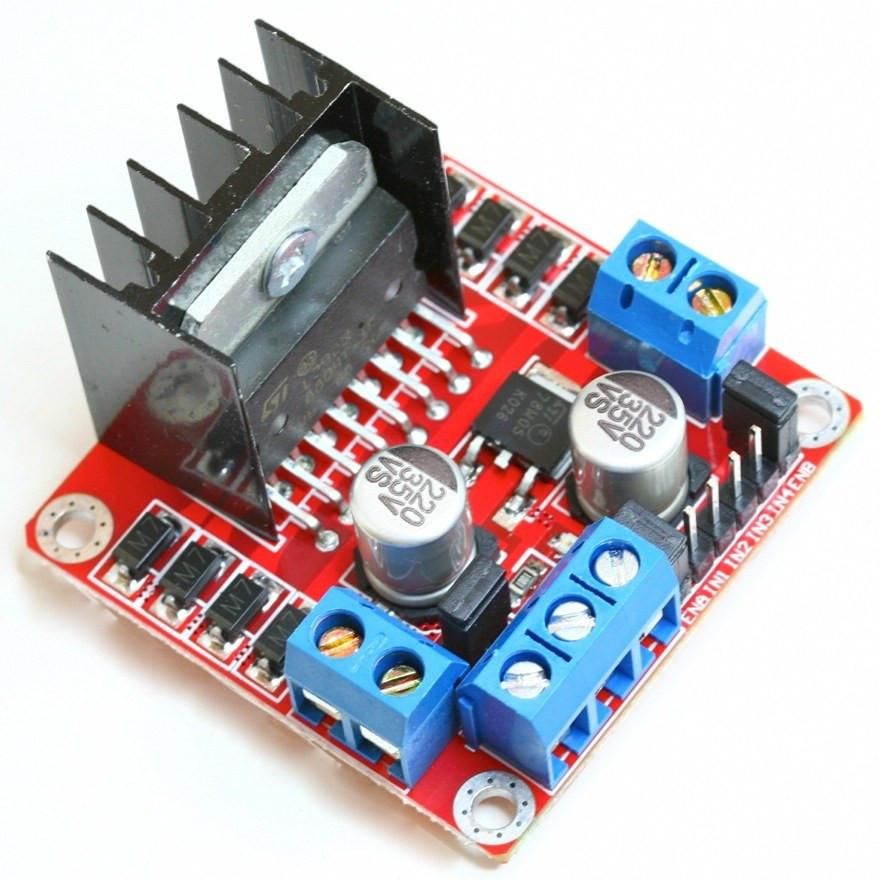
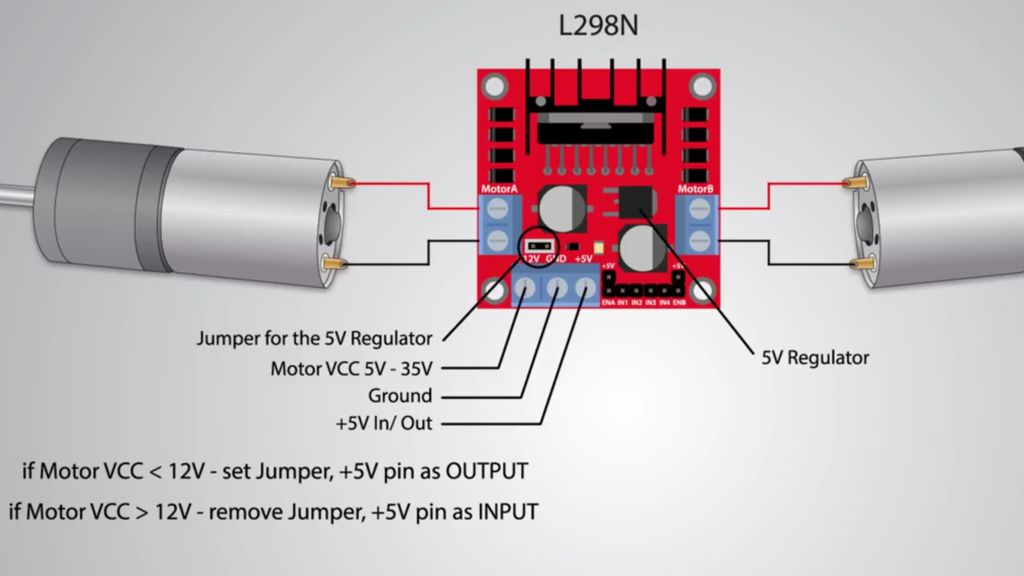
7- L298N电机驱动
机器人身体的8-木制
9-开关
步骤2:第一层
1-连接电机,w高跟鞋和驱动器的使用
2-使用电线将电机连接到电机驱动器
驱动器的3个引脚连接到引脚3,12,13,5,2,7为了arduino
请注意:
如果右侧电机的轮子向相反的方向移动,则只需更换连接到驱动器的电机的电线
步骤3:第二层
- 将arduino,传感器和面包板层放在第二层和让我们放一些电线
请阅读代码文件以了解我的连接,但让我们总结一下:
1)每个声纳传感器的VCC和GND到面包板,Trigger和Echo将连接到引脚A0,A1,A2,A3,A4,A5用于3个传感器
2)5V和GND从arduino提供breadBoard
3)5v从驱动器到arduino输入
4)从arduino到GND的驱动器
步骤4:启动电源
放置你的电池座中装有电池,然后将红线连接到i上使用arduino的电线将驱动器和黑线连接至驱动器的GND
步骤5:可选步骤
此步骤为用你的机器人带来一些快乐
1)放置你的液晶显示器并像连接的代码一样连接到arduino
2)将电池座的红线连接到ON的引脚上开关并从另一个引脚接线到驱动器的输入端以通过开关控制机器人的电源
3)最后完成并随意尝试并让我知道是否你遇到任何问题
-
机器人
+关注
关注
210文章
28212浏览量
206568
发布评论请先 登录
相关推荐
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人

柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
「喜报」迈步机器人荣获机器人应用典型案例奖

ABB机器人拓展其免费的Wizard简易编程软件的应用范围

LabVIEW的六轴工业机器人运动控制系统
工业机器人产业发展及应用现状






 工商网监
工商网监
评论