 机器人泰迪熊的制作教程
机器人泰迪熊的制作教程
第1步:收集材料
技术材料:
4 x标准伺服电机
1 x连续旋转伺服
4 x 16mm按钮(1个红色,1个蓝色,1个,白色,1个橙色)
4个10k电阻
1个无焊面包板
1个Arduino Uno
3 x 9V电池
3 x电池夹连接器
焊接用电线
缝制材料:
2码的熊色织物
缝衣针
线
棉(用于填充熊)
别针
按钮(用于熊的眼睛)
魔术贴条
其他:
丙烯酸/马来石激光切割件(包括.dxf文件)
电缆扎带
硬件
塑料螺丝垫片
电工胶带
双面胶带
第2步:组装人体带y
在这一步中,您将组装按钮架和熊身的部件。机身将由两层高的结构组成,可容纳Arduino,电机和电池。
最底层:
激光切割了您的两个踢脚线(在.dxf文件中标记)。一种应从镁橄榄石切下,另一种应从丙烯酸酯切下。
将Arduino放在石板基板的底部,并使用机器螺钉固定。您的面包板可以放在Arduino旁边,为9V电池提供足够的空间。使用双面胶带固定电池。 (有关确切位置,请参阅上图)。
顶级:
放置四个标准伺服电机亚克力踢脚线(请参阅图像)。这些将为熊的手臂和腿创建关节。
使用束线带固定电动机。
将连续旋转电机放置在丙烯酸踢脚线板上的剩余空间中。这将充当熊的脖子。
将伺服喇叭连接到亚克力手臂和腿上。
将亚克力四肢拧到相应的标准舵机上。
注意:您的连续旋转伺服系统应该尚未连接任何东西
按钮面板:
将8根7英寸的电线和焊锡丝剪断到按钮的引线上。
拿起丙烯酸按钮扣(在.dxf文件中标记),然后将四个按钮拧入到位。请参阅图像以获取确切的颜色顺序。
步骤3:布线和放样
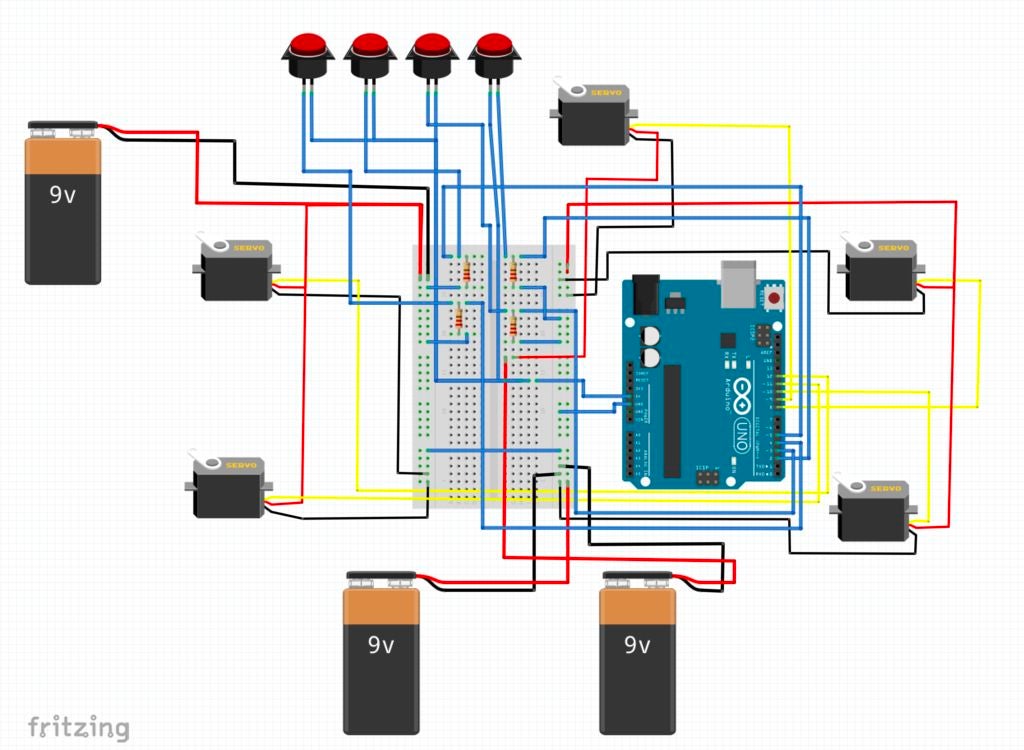
在此步骤中,我们将进行所有布线并放样在上一步中组装的底板。有关确切的布线,请参阅压条图。
布线:
建议:
使用“通孔布线(在.dxf文件中标记)以将电线从电动机和按钮连接到面包板。这将有助于使电线井井有条。
将连接线剪断的时间比预期的放样时间长一点。
屋顶:
取四个长机器螺钉,将它们穿过masonite基板角落的孔。为了在masonite层和丙烯酸层之间提供空间,在每个螺钉上放置塑料垫片。
将您的丙烯酸踢脚线直接放在石板的顶部,使螺钉的末端穿过相应的孔。
使用坚果安全。
注意:您的按钮支架现在应该位于丙烯酸基板的顶部。
第4步:缝制熊
在这一步中,我们将缝制熊的外壳。简介中提供了一种模式。
缝制身体:
按照该模式缝制熊的外壳。测量熊四肢的长度,以解决图案碎片的缩放问题。 (注意:丙烯酸树脂的肢体应短于织物肢体的长度。在手臂上增加约两英寸,并相应地缩放)。
为了让您的熊进出套管,请在其身体前部的接缝处放置一条胶粘剂魔术贴(标记在图案中)。
在覆盖丙烯酸的胳膊和腿之前,先将棉花放在每个熊的四肢中。
缝制头部:
按照图案缝制熊的头。
使用按钮吸引目光。
使用亚克力颈托(在.dxf文件中标记)将磁头固定到连续旋转电机上。使用丙烯酸树脂边缘上的孔将头缝到脖子上。
步骤5:下载代码
下载文件夹,其中包含Python游戏代码和相应的Arduino代码。 Python游戏代码可以从您的终端执行。
注意:
确保在运行Python代码之前运行Arduino代码以避免阻塞端口。
您的熊必须连接到计算机才能玩游戏。
游戏启动后,指令将立即播放。
步骤6:尽情享受熊
责任编辑:wv
-
机器人
+关注
关注
211文章
28418浏览量
207070
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人

柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
工业4.0中的机器人向协作机器人演进
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论