 Arbotix臂式分拣机带输送机的制作
Arbotix臂式分拣机带输送机的制作
步骤1:零件和要求
对于此构建,您需要:
- PhantomX Pincher Robot Arm Kit Mark II
- Pixy CMUcam5带安装硬件ASM-PIXY-CAM
- Robot Geek Large Workbench ASM-WRKBL
- 2x RobotGeek Relay ASM -RG-RELAY
- 2x RobotGeek按钮ASM-RG-PUSHBUTTON
- RobotGeek 300mm 3针传感器电缆(传感器附带)
- 袋装M3x10 F/F支架(至少20个)
- M3x6螺栓(至少40个)
您可以在http://www.trossenrobotics.com/
- 输送机(直接控制或通过变频器。我们使用Allen-Bradley PowerFlex40)
- 一些布线将输送机连接到继电器,继电器连接到控制电源
- 颜色鲜艳或颜色编码的物体。
步骤2:预装配
首先,需要安装所需的软件和硬件。在这个链接中,给出了几个如何以正确的顺序安装pincher arm机器人的指南:
http://learn.trossenrobotics.com/interbotix/robot -。..
您还需要为pixy相机安装所需的软件和库。这里给出了关于如何实现这一点的完整解释。
http://cmucam.org/projects/cmucam5/wiki
http://cmucam.org/projects/cmucam5/wiki/Hooking_up_Pixy_to_a_Microcontroller_(like_an_Arduino)
一旦你安装了手臂和摄像头并使其全部启动并运行,就可以继续这个项目了。
步骤3:主装配
现在是时候将所有零件装配到大型工作台上。
使用提供的螺栓将所有组件安装到主板上的支架。
这个位置并不是非常重要,但保持一些整洁和间隙是很好的,这样你可以在以后添加电缆,其中传感器电缆将完美地安装在板上的槽中。
为了便于使用和修改,我们将机器人控制器从机械臂上的位置移到了板上。它有更多的间隙,通过短电缆,我们可以将pixy相机和所有其他相连接到控制器。
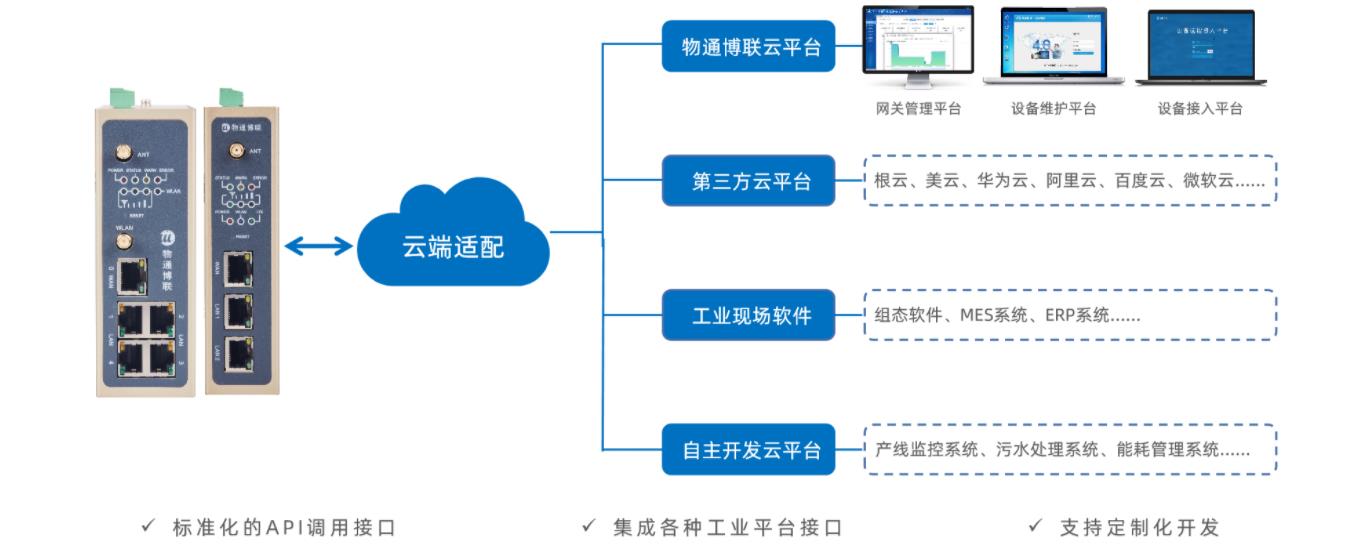
第4步:布线
这里展示了如何连接所有组件以便它可以执行任务。
robotix m控制器有多种引脚可供您插入各种设备。
查看图像说明以获取更多信息。
步骤5:获取程序
包含2个zip文件,您需要使用您安装的arduino软件打开这些文件,同时按照夹臂组装指南。
此处包含2个程序,一个是测试文件,可让您放松,紧张并测量当前的电机位置。这对于进行姿势然后保存设置非常有用,因此您可以在其他程序中使用它。
其他程序是主程序。除非所使用的部件完全相同,否则在为您自己的设置设置姿势之前将无法正常工作。
步骤6:读取和保存姿势
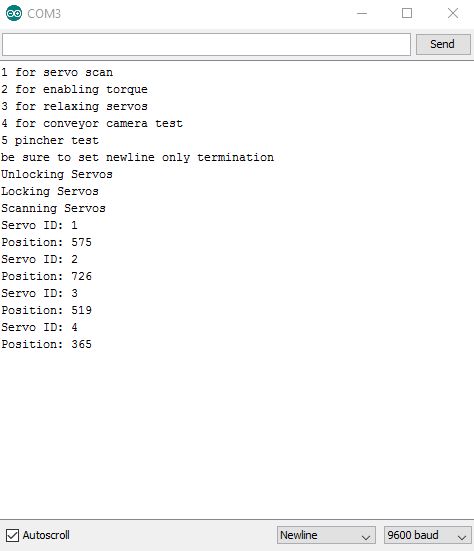
运行位置读取器程序后,单击右上角的放大图标打开串口监视器。
这里有多个您可以测试和检查的选项。
您可以放松舵机,然后用手移动它,使其处于您想要的位置。然后再次拧紧伺服系统,然后可以测量电机的位置。那么
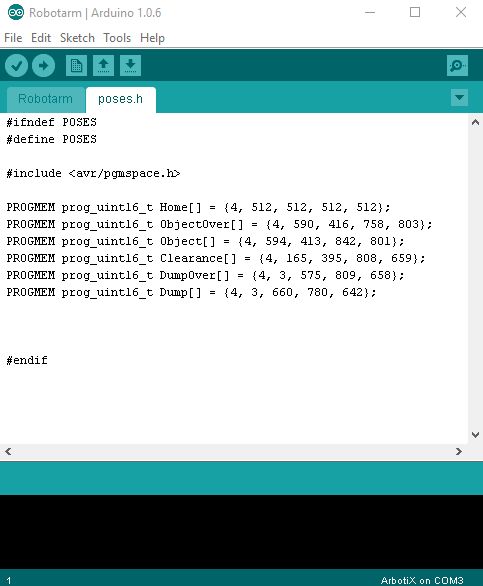
所有姿势的数据都包含在poses.h文件中,该文件位于robotarm文件夹内。
姿势如下:
Home =默认位置,默认情况下直接上升
ObjectOver =在抓取之前将鼠标悬停在对象上方
对象=围绕物体的手臂,可以抓住这个位置
清除=它将采取的另一个姿势,以避免任何障碍物
DumpOver =悬停在倾销点
转储=在转储点,将在此位置释放
第7步:使用Pixy并测试Pixy
如果你在pixy相机上检查了wiki,你可能已经注意到了这个链接。
使用这个你可以看到你要过滤的对象out。
要过滤掉的对象应设置为签名1,
要忽略的对象应设置为signat 2或更多。
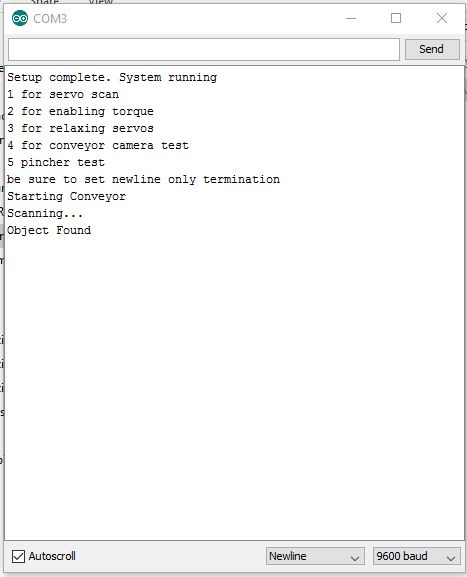
将pixymon设置为默认程序。您可以再次运行位置读取器并使用传送带相机测试功能。这将运行传送带,直到相机检测到物体。一旦检测到物体,它就会停止。
它停止的位置也是输送机停在主程序的位置。因此,您可以将该点用作手臂拾取物体的点。你必须设置你的姿势才能考虑到这一点。
第8步:做得好!

一旦你设置了所有姿势,并考虑到停止位置。并设置了pixy相机以使用您准备好的系统!
您现在可以运行主程序并将其与彩色对象一起使用。一些姿势可能首先需要调整,但不应该花太长时间。
责任编辑:wv
-
传感器
+关注
关注
2553文章
51520浏览量
757348 -
输送机
+关注
关注
0文章
68浏览量
10823
发布评论请先 登录
相关推荐
工业氧化镁管链输送机 无尘管链式粉料输送机性能



皮带输送机监测预警物联网系统


输送带保护装置SMPP03-CAN-W两级跑偏开关适用范围
【⌈嵌入式机电一体化系统设计与实现⌋阅读体验】+磁力输送机系统设计的创新与挑战
防偏保护 KPT120-35两级跑偏开关用于检测输送带的运行状态
高空输送机远程监控运维管理系统解决方案







 工商网监
工商网监
评论