 如何使用基于ESP8266的NodeMCU原型板和电机控制板来控制两种类型的电机
如何使用基于ESP8266的NodeMCU原型板和电机控制板来控制两种类型的电机
第1步:使用的项目
对于这个教练,我使用了Gearbest的以下项目:
2 x NodeMCU 1.0(又名v2) - http://www.gearbest.com/transmitters-receivers-mod 。. 。
2 x ESP-12E电机护罩 - http://www.gearbest.com/boards-shields/pp_340732.h.。.
2 x直流减速电机 - http ://www.gearbest.com/development-boards/pp_7099 。..
1 x 28BYJ步进电机 - http://www.gearbest.com/other-accessories/pp_23115.。.
一句警告。确保你得到NodeMCU 1.0。 Gearbest还销售NodeMCU 0.9(又名v1)。它不适合电机护罩(我有第一手经验)。
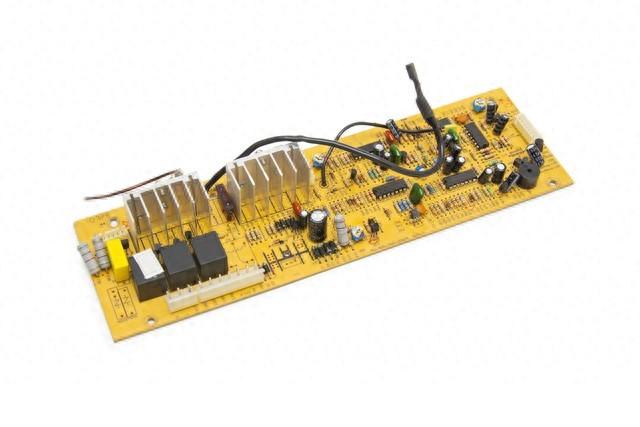
第2步:电机护罩

特色电机护罩由深圳智能科技博士(我喜欢这个名字)制造。虽然董事会非常可靠而且很好但我发现文档缺乏。该板通常捆绑在一个WiFi机器人车载套件中,可以使用该软件。该软件是我使用的而不是文档。但是,我找不到与步进电机一起使用驱动器的任何信息。希望这个教练可以解决这个问题。
Motor Shield文档
WiFi机器人汽车源
本质上,电机屏蔽功能:
由NodeMCU IO 1,2,3和4控制的四个供电输出
电机和NodeMCU的可选双电压
所有相关引脚的便利性突破
电机电源引脚标记为A-,A +,B-和B +。 nodemcu和Arduino GPIO的映射不相同。如果您尝试在Arduino IDE中将D1引脚用作io-pin 1,它将无法工作。在Arduino中你必须使用D1(这是5或5的别名。引脚映射如下:
Board pin |NodeMCU GPIO |Arduino IDE
A -15或D1
A +30或D3
B -24或D2
B +42或D4
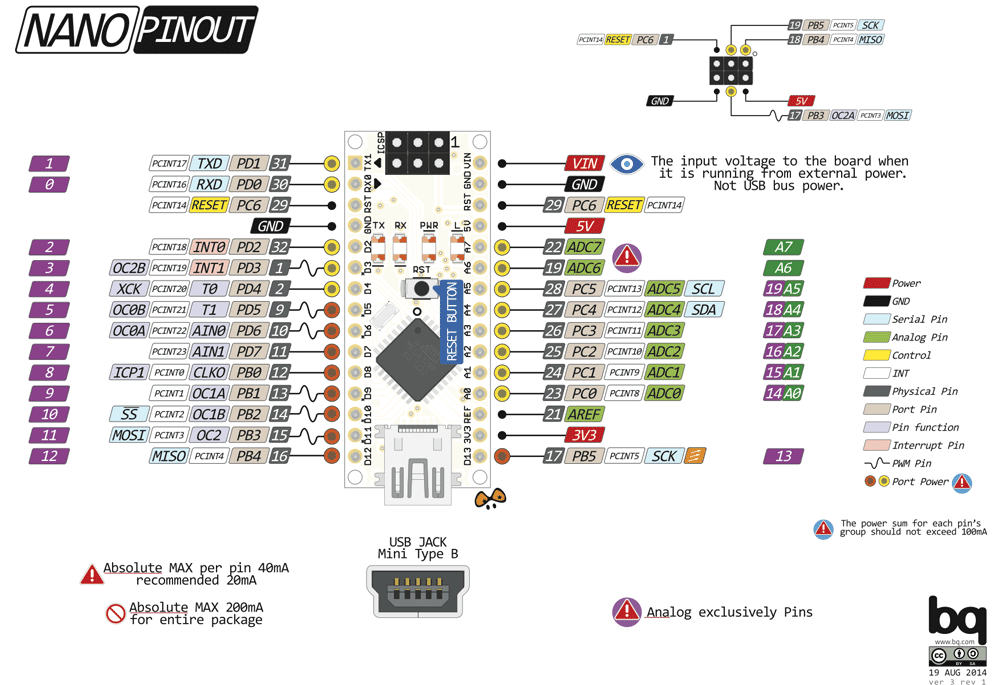
第3步:ESP-12E(NodeMCU)

NodeMCU 1.0(又名v2)是一个非常好用的板。我使用过的其他ESP8266板需要3.3v,还需要特殊的接线用于闪存.NodeMCU有一个板载3.3v电压调节器所以它可以通过用于编程的相同microusb电缆供电。它还具有用于闪存模式和复位的板载按钮。
NodeMCU板可以提供不同的固件。对于这个Instructable我选择使用NodeMCU Lua固件。你可以用Arduino IDE实现同样的功能。它可以b知道即使Lua固件是为NodeMCU板开发的,它也可以用于任何ESP板。 Lua是一种脚本语言,功能强大且功能强大。 NodeMCU Lua环境还具有文件系统。固件中有很多模块,但您可能需要使用Arduino IDE才能利用某些特定的库。
假设您有一块没有Lua固件的电路板:
在此下载ESP8266flasher
在此处下载Lua固件。或者你可以在这里自己做饭。
解压缩二进制文件并使用ESP8266flasher刷新fimware。按住闪光灯按钮然后重置以将设备置于闪光模式。如果遇到麻烦,可以在之前的链接中找到更多信息。
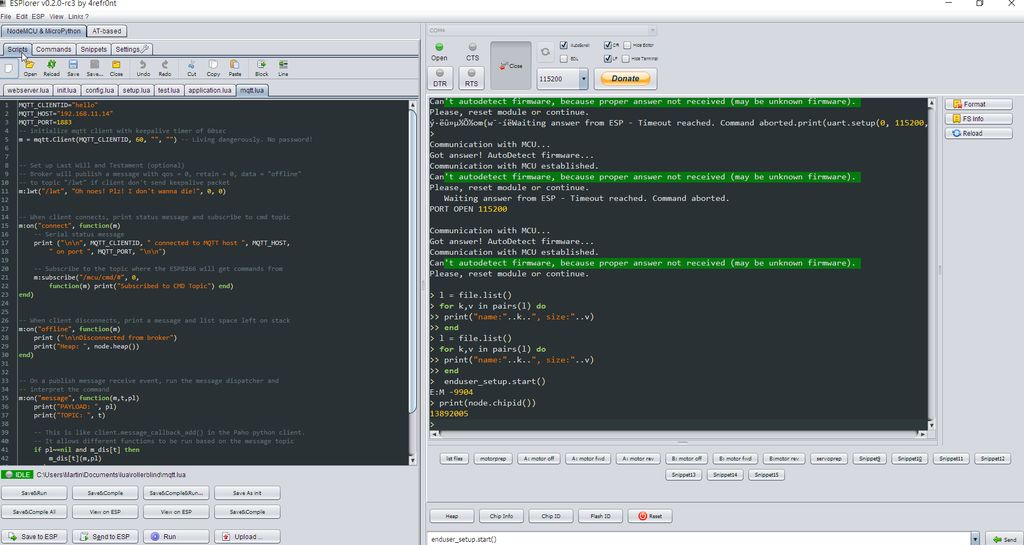
从此处下载并安装NodeMCU Lua IDE ESPlorer
此处可找到固件和模块文档。
在lua上可以找到一般的Lua语言文档.org。
步骤4:驱动直流电机
A +引脚(D1)控制第一个DC的PWM输出电机和A-(D3)引脚控制方向。 PWM输出驱动电机并允许速度控制。例如,50%的占空比实际上产生较低的输出电压。它与脉冲计数无关。 A方向控制简单地变为低或高,有效地反转电压并且因此电机的旋转方向。请注意,通过将电机电源连接到VM并将NodeMCU电源连接到VIN,您可以使用单独的电源(通常更高的电压)驱动电机。 重要提示:如果您使用两个电源,请移除连接VM和VIN的跳线。
要试用它,请执行以下操作:
将电机的( - )(通常为黑色)导线连接到A-
将电机的(+)(通常为红色)导线连接到A +
将电机B连接到同样的方式
使用ESPlorer,上传init.lua(下方)
上传后,重置并观察电机的转动,反转和停止。要重复,请再次按重置。很明显,除了演示目的之外,这种特殊行为并不是非常有用。应该通过wifi控制电机,但这是针对这种指示的第二部分。加载/运行文件后,您可以通过调用电机功能e来控制ESPlorer命令linte中的电机。 G。
》 motor_a(FWD,100)
--motordrive: init.lua pin_a_speed = 1
pin_a_dir = 3
pin_b_speed = 2
pin_b_dir = 4 FWD = gpio.HIGH
REV = gpio.LOW duty = 1023 --initiate motor A
gpio.mode(pin_a_speed,gpio.OUTPUT)
gpio.write(pin_a_speed,gpio.LOW)
pwm.setup(pin_a_speed,1000,duty) --PWM 1KHz, Duty 1023
pwm.start(pin_a_speed)
pwm.setduty(pin_a_speed,0)
gpio.mode(pin_a_dir,gpio.OUTPUT) --initiate motor B
gpio.mode(pin_b_speed,gpio.OUTPUT)
gpio.write(pin_b_speed,gpio.LOW)
pwm.setup(pin_b_speed,1000,duty) --PWM 1KHz, Duty 1023
pwm.start(pin_b_speed)
pwm.setduty(pin_b_speed,0)
gpio.mode(pin_b_dir,gpio.OUTPUT) -- speed is 0 - 100
function motor(pin_speed, pin_dir, dir, speed)
gpio.write(pin_dir,dir)
pwm.setduty(pin_speed, (speed * duty) / 100)
end function motor_a(dir, speed)
motor(pin_a_speed, pin_a_dir, dir, speed)
end
function motor_b(dir, speed)
motor(pin_b_speed, pin_b_dir, dir, speed)
end
------------------------------------------------- --start motors 100% speed forward
motor_a(FWD, 100)
motor_b(FWD, 100) --reverse motors after 4s
tmr.register(0, 4000, tmr.ALARM_SINGLE, function()
motor_a(REV, 100)
motor_b(REV, 100)
end)
tmr.start(0) --turn motors off after 8s
tmr.register(1, 8000, tmr.ALARM_SINGLE, function()
motor_a(FWD, 0)
motor_b(FWD, 0)
end)
tmr.start(1)
步骤5:驱动步进电机
对于本演示,我使用了标准的单极(5线)28BYJ-48齿轮式步进电机。阅读更多关于步进器的信息。
连接电线
蓝色 - 》 A-
粉红色 - 》 A +
黄色 - 》 B-
橙色 - 》 B +
红色 - 》 VM
使用ESPlorer,上传init。 lua和stepper.lua
上传后,重置并观察电机转半圈(2048步),反转并停止。要重复,请再次按重置。至于直流电机,对于大多数项目,步进电机应该通过wifi控制。您可以使用step_move函数从命令行运行步进器。
init.lua
--init.lua
--
dofile(“stepper.lua”)
--
FWD=1
REV=-1
--
ROTATION_FULL=4096 --One revolution, 28BYJ-48 geared stepper motor
ROTATION_HALF=ROTATION_FULL / 2
--
step_move(ROTATION_HALF,FWD,1)
tmr.register(0, 5000, tmr.ALARM_SINGLE, function()
step_move(ROTATION_HALF,REV,1)
end);
tmr.start(0);
stepper.lua (信用:wakenils http://www.esp8266.com/viewtopic.php?f=19&t=2326)
-- stepper.lua
-- code from: http://www.esp8266.com/viewtopic.php?f=19&t=2326
-- simple stepper driver for controlling a stepper motor with a
-- l293d driver
-- nodemcu pins: 0 5 6 7
stepper_pins = {1,3,2,4} -- (A-)blue, (A+)pink, (B-)yellow, (B+)orange
-- half or full stepping
step_states4 = {
{1,0,0,1},
{1,1,0,0},
{0,1,1,0},
{0,0,1,1}
}
step_states8 = {
{1,0,0,0},
{1,1,0,0},
{0,1,0,0},
{0,1,1,0},
{0,0,1,0},
{0,0,1,1},
{0,0,0,1},
{1,0,0,1},
}
step_states = step_states8 -- choose stepping mode
step_numstates = 8 -- change to match number of rows in step_states
step_delay = 20 -- choose speed
step_state = 0 -- updated by step_take-function
step_direction = 1 -- choose step direction -1, 1
step_stepsleft = 0 -- number of steps to move, will de decremented
step_timerid = 4 -- which timer to use for the steps
-- setup pins
for i = 1, 4, 1 do
gpio.mode(stepper_pins[i],gpio.OUTPUT)
end-- turn off all pins to let motor rest
function step_stopstate()
for i = 1, 4, 1 do
gpio.write(stepper_pins[i], 0)
end
end-- make stepper take one step
function step_take()
-- jump to the next state in the direction, wrap
step_state = step_state + step_direction
if step_state 》 step_numstates then
step_state = 1;
elseif step_state 《 1 then
step_state = step_numstates
end
-- write the current state to the pins
for i = 1, 4, 1 do
gpio.write(stepper_pins[i], step_states[step_state][i])
end
-- might take another step after step_delay
step_stepsleft = step_stepsleft-1
if step_stepsleft 》 0 then
tmr.alarm(step_timerid, step_delay, 0, step_take )
else
step_stopstate()
end
end-- public method to start moving number of ‘int steps’ in ‘int direction’
function step_move(steps, direction, delay)
tmr.stop(step_timerid)
step_stepsleft = steps
step_direction = direction
step_delay = delay
step_take()
end -- public method to cancel moving
function step_stop()
tmr.stop(step_timerid)
step_stepsleft = 0
step_stopstate()
end
步骤6:结论
花了一些时间来弄清楚如何将电机驱动板与NodeMCU一起使用。文档非常糟糕。但是,既然我知道如何使用组合,我肯定会将它用于更多项目。希望这个教师共享的信息能够帮助其他人开始。我非常喜欢类似Arduino的插件屏蔽组合。我希望更多的制造商开始为NodeMCU制作防护罩。
责任编辑:wv
-
电机
+关注
关注
142文章
9028浏览量
145626 -
ESP8266
+关注
关注
50文章
962浏览量
45083 -
NODEMCU
+关注
关注
13文章
289浏览量
21443
发布评论请先 登录
相关推荐
专为吸尘器定制的电机控制板方案:创新与突破
电机控制器原理是什么?类型有哪些?
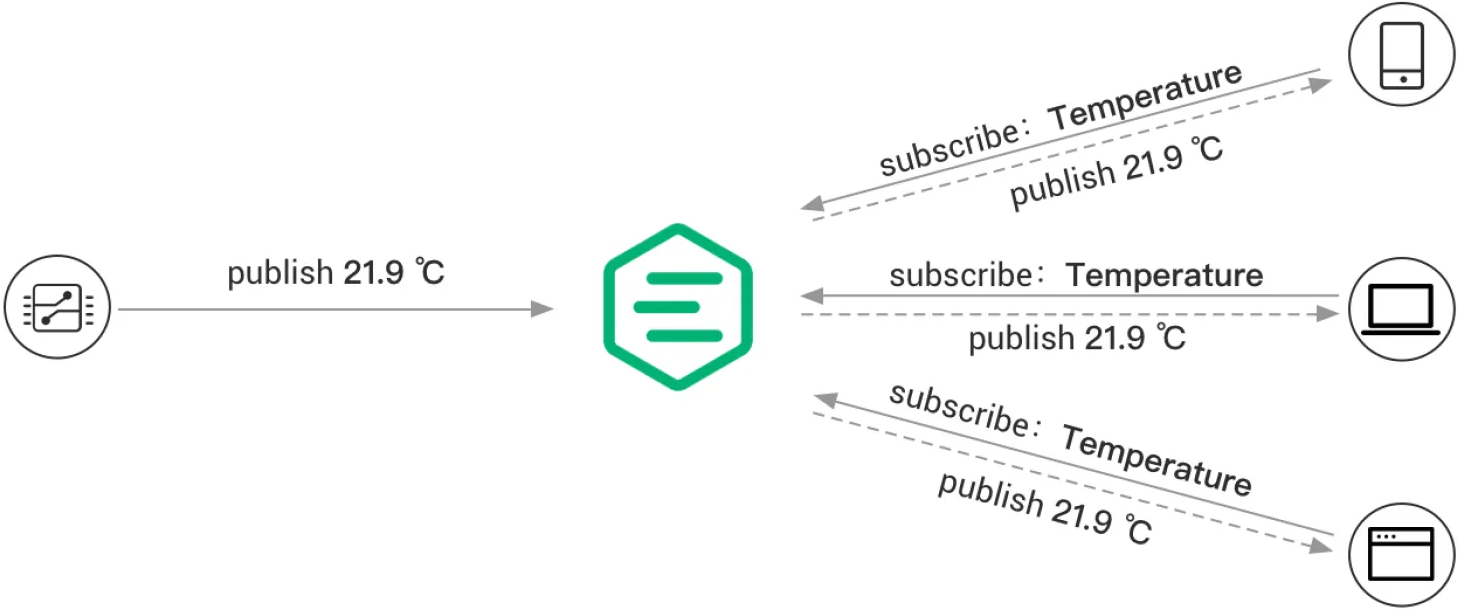
ESP8266 通过 MQTT 协议实现 LED 的远程控制
esp32和esp8266代码共用吗
esp8266和esp32区别是什么
esp8266不烧录可以使用吗
esp8266wifi模块怎么连接手机
Arduino Nano 和 NodeMCU ESP8266 读取 DHT11 环境温湿度数据及 OLED显示
如何在ESP8266上获取并刷写最新固件?
请问esp8266如何扩展pwm到8路?
开源项目!用ESP8266 DIY会爬墙的无人机

国产低成本Wi-Fi SoC解决方案芯片ESP8266与ESP8285对比差异
使用Wi-Fi ESP8266方案模组接入云平台






 工商网监
工商网监
评论