 旋转停车系统的制作
旋转停车系统的制作
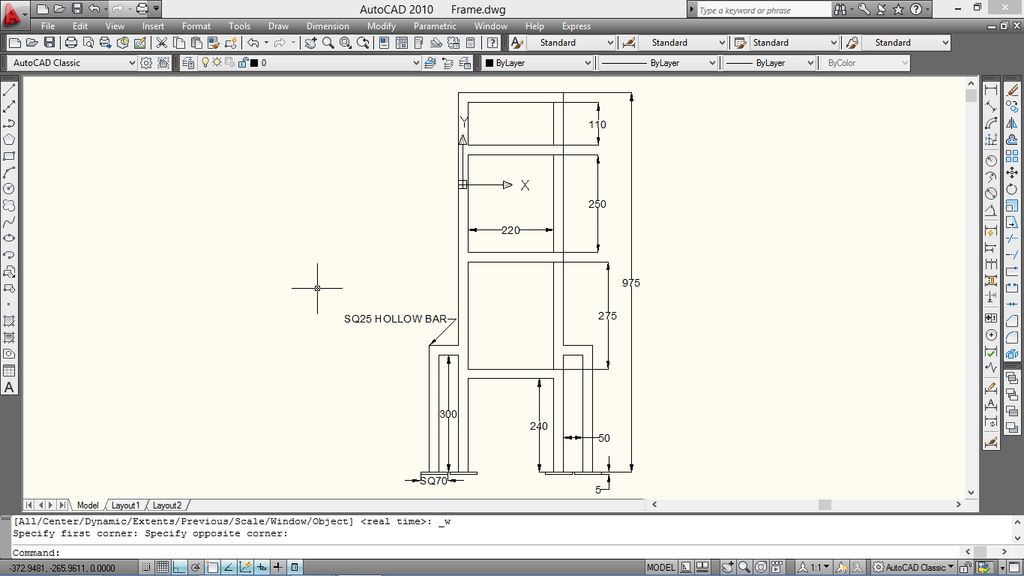
步骤1 :机械设计和零件
首先必须设计和创建机械零件。
我提供用CAD和图片制作的设计
第二步:托盘
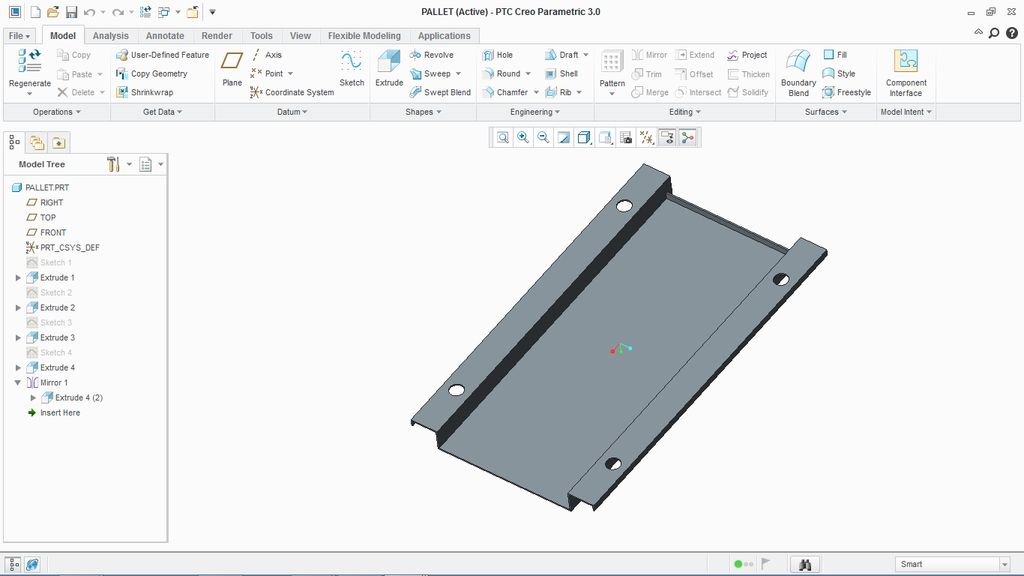
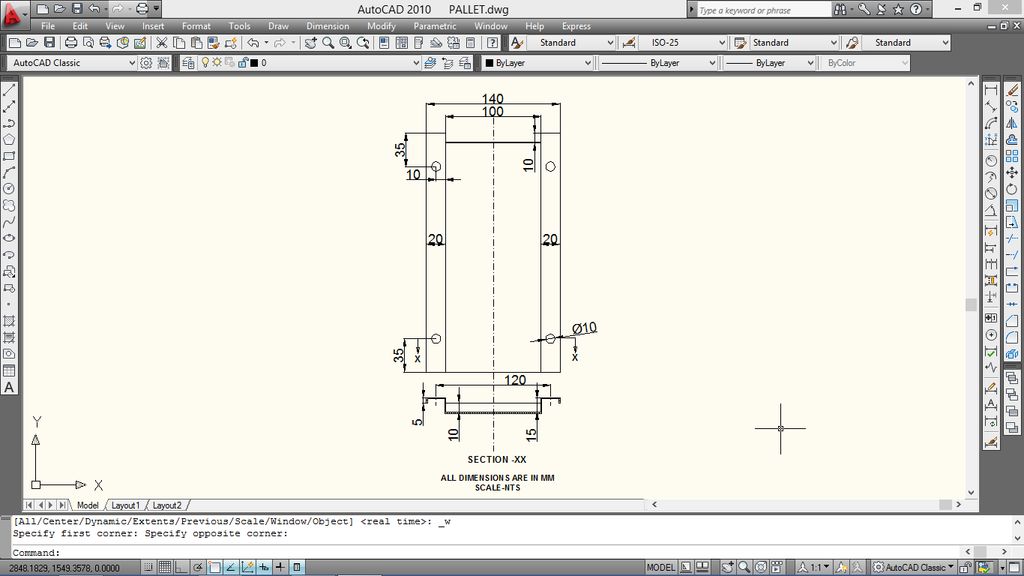
帕勒t 是一个类似平台的平台,汽车将在该平台上停留或举升。它的设计使所有轿厢都适合该托盘。
步骤3:链轮
链轮或链轮,它是由软钢板制成并在制造过程中成形的。是异型轮,带有齿,嵌齿轮,甚至链轮,它们与链,履带或其他穿孔或凹陷的材料啮合。 “链轮”一词通常适用于任何带有径向突起的链条,这些链条都与通过其的链条啮合。链轮与齿轮的区别在于,链轮从不直接啮合在一起,而链轮则与滑轮不同,链轮具有齿且皮带轮是光滑的。
链轮具有多种设计,据称可最大程度地提高效率。每个由其创建者。链轮通常没有法兰。一些用于同步带的链轮带有法兰,以使同步带居中。链轮和链条也可用于从一个轴到另一轴的动力传递,不允许打滑,链轮代替链带或绳索,链轮代替滑轮。它们可以高速运行,并且某些形式的链条即使在高速运行时也可以保持无噪音。
步骤4:滚子链条
滚子链或衬套滚子链是链条驱动器的一种,最常用于在许多家用,工业和农业机械上传输机械动力,包括输送机,电线和管子-绘图机,印刷机,汽车,摩托车和自行车。它由通过侧链节固定在一起的一系列短圆柱滚子组成。它由称为链轮的齿轮驱动。这是一种简单,可靠且有效的动力传输方式。
步骤5:衬套轴承

衬套,也称为衬套,是一个独立的滑动轴承,插入到壳体中以提供旋转应用的轴承表面;这是滑动轴承的最常见形式。常见的设计包括实心(套筒和法兰),剖分和紧定的衬套。套筒,开口或夹紧的衬套只是具有内径(ID),外径(OD)和长度的材料的“套筒”。三种类型的区别在于,实心套筒衬套始终是实心的,剖分衬套的长度方向有切口,而夹紧轴承类似于剖分衬套,但切口上有咬合(或压紧) 。法兰衬套是一种套筒衬套,其一端具有从OD径向向外延伸的法兰。法兰用于在安装衬套时可靠地定位衬套或提供止推轴承表面。
步骤6:“ L”形连接器
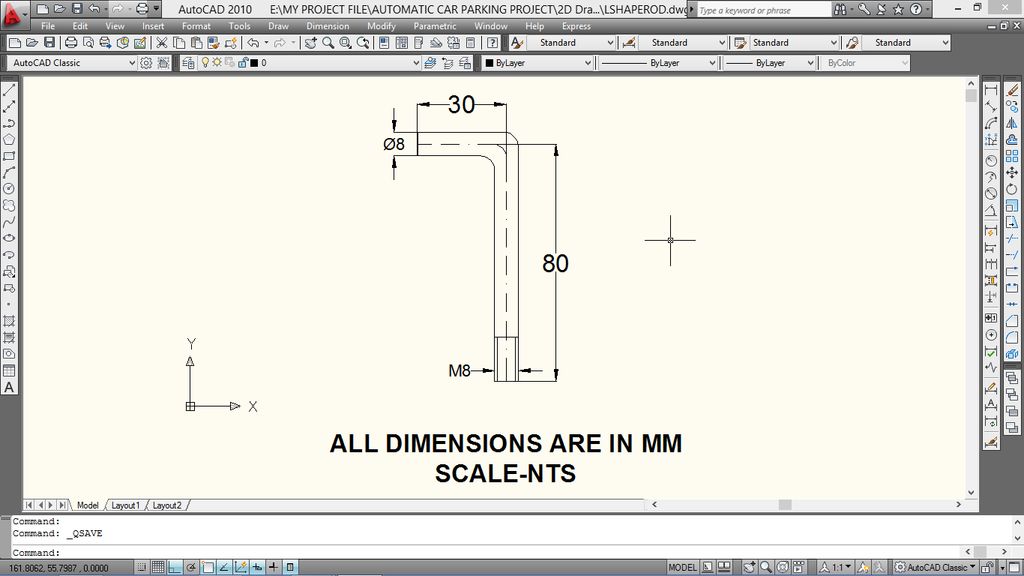
使用方形杆将货盘连接到杆。
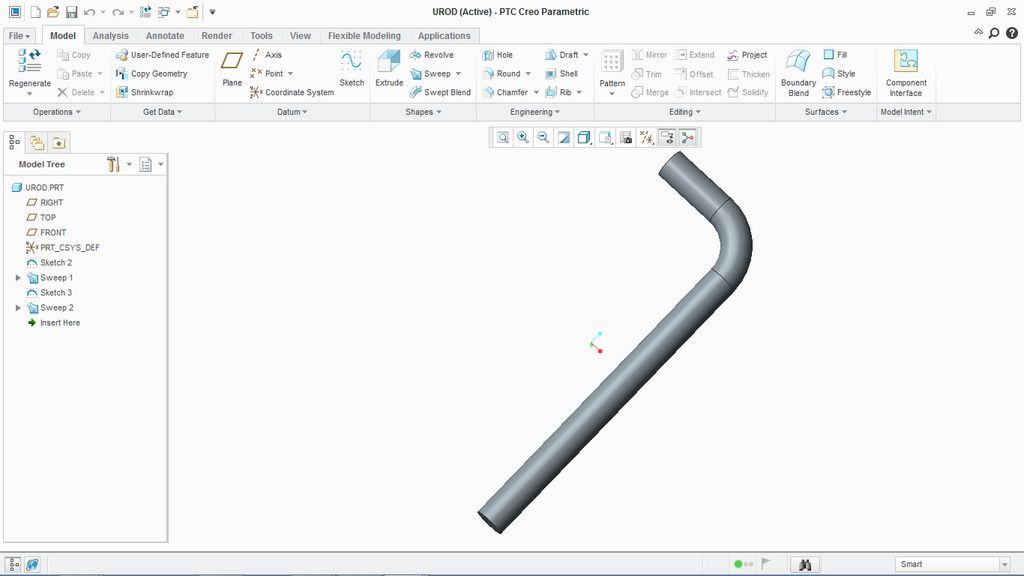
步骤7:方形杆
将L形连接器固定在一起。
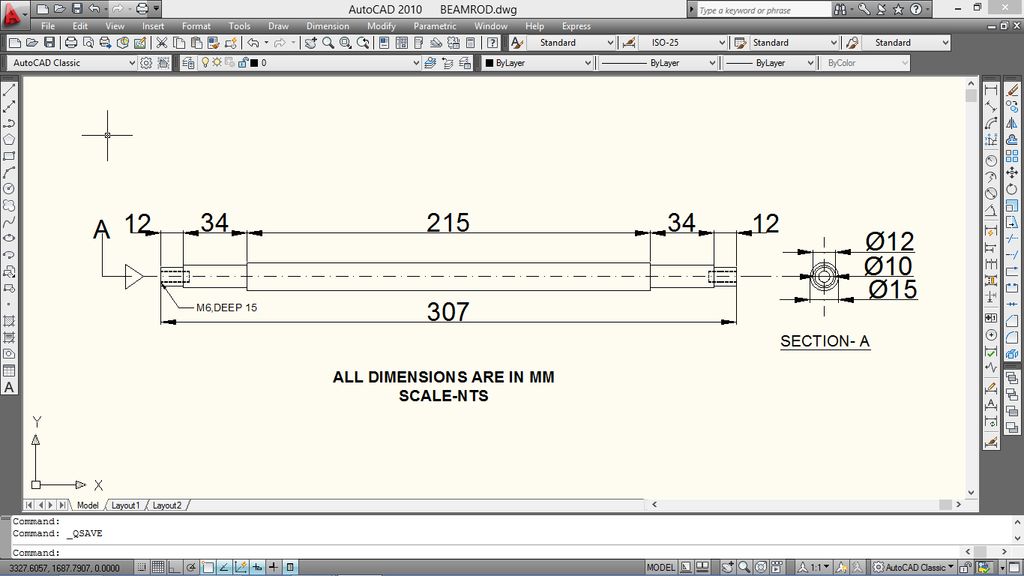
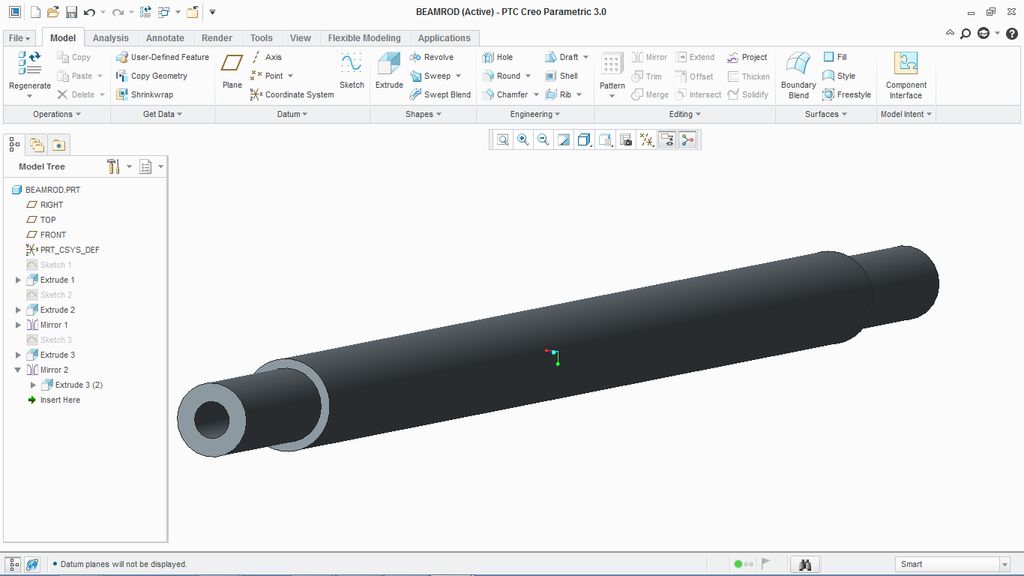
步骤8:梁杆
已使用
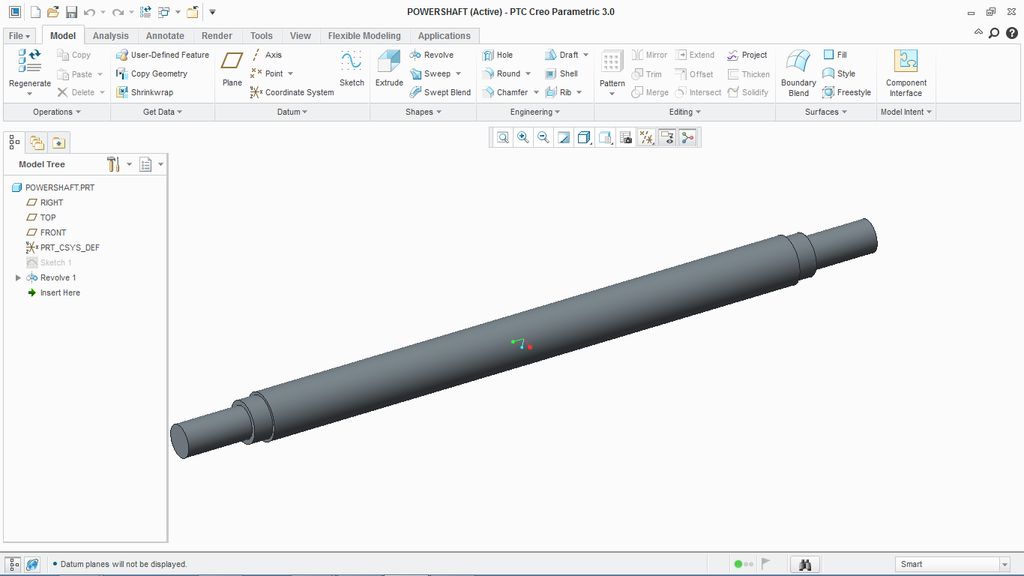
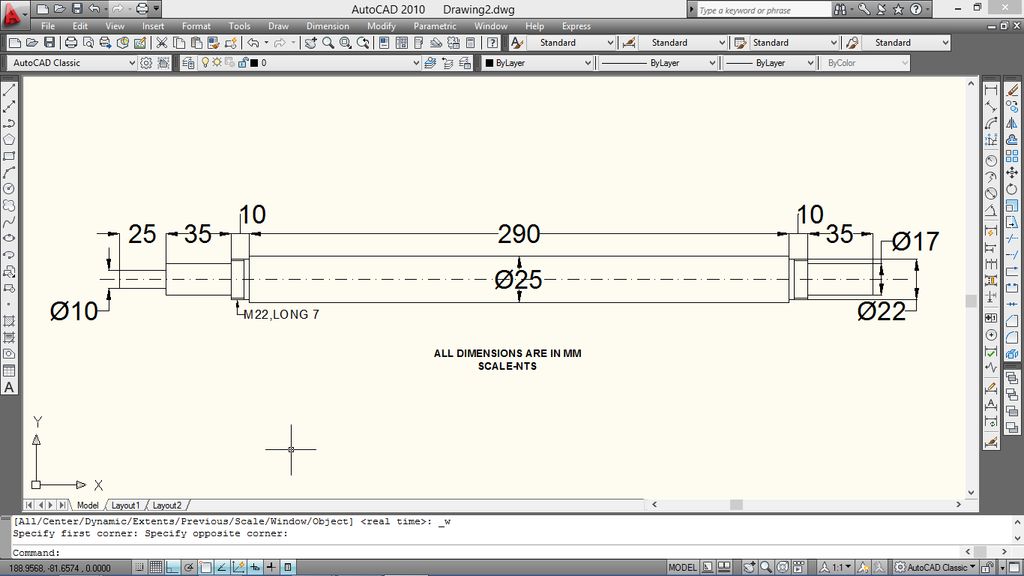
步骤9:电源轴
提供电源。
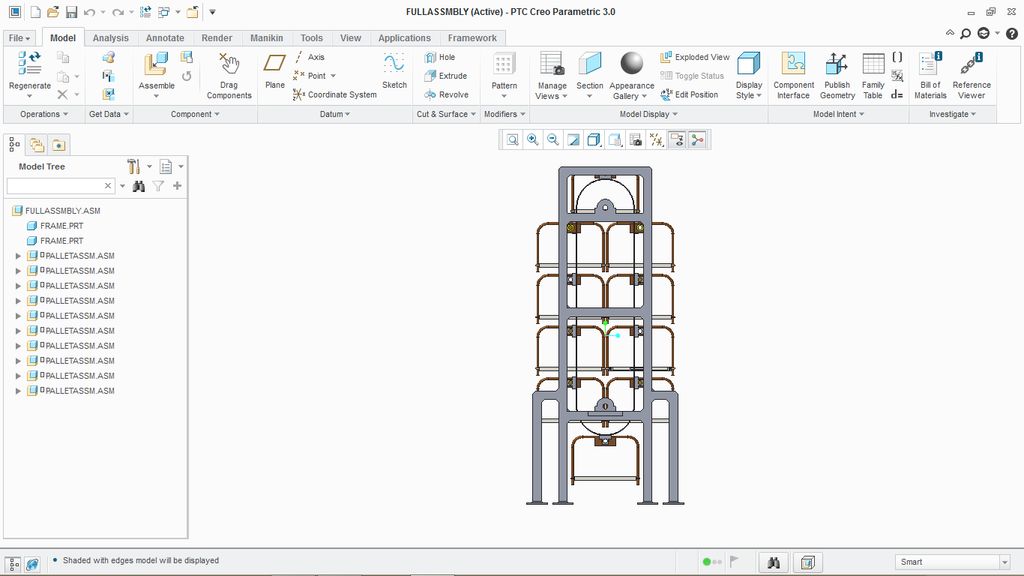
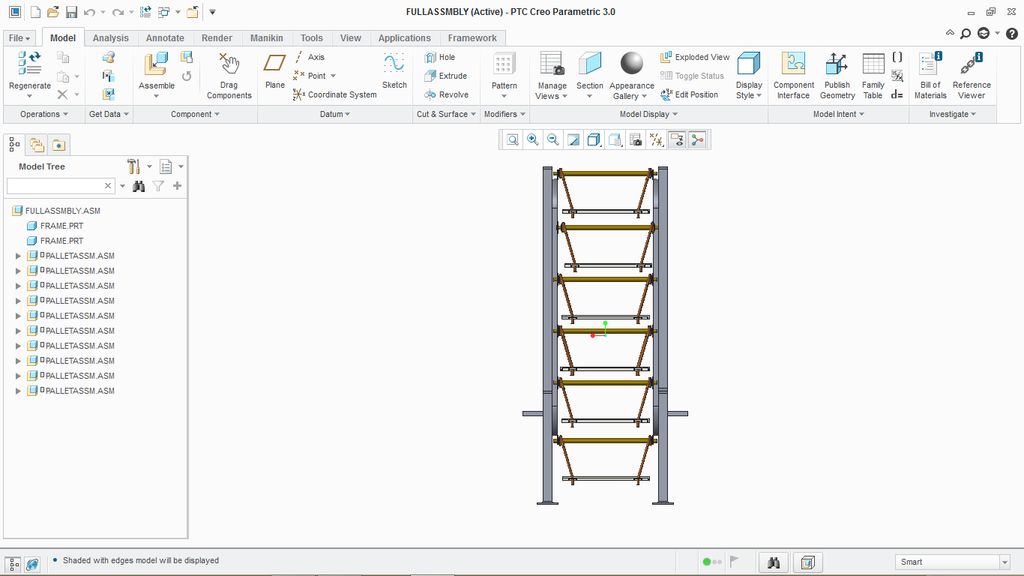
步骤10:框架
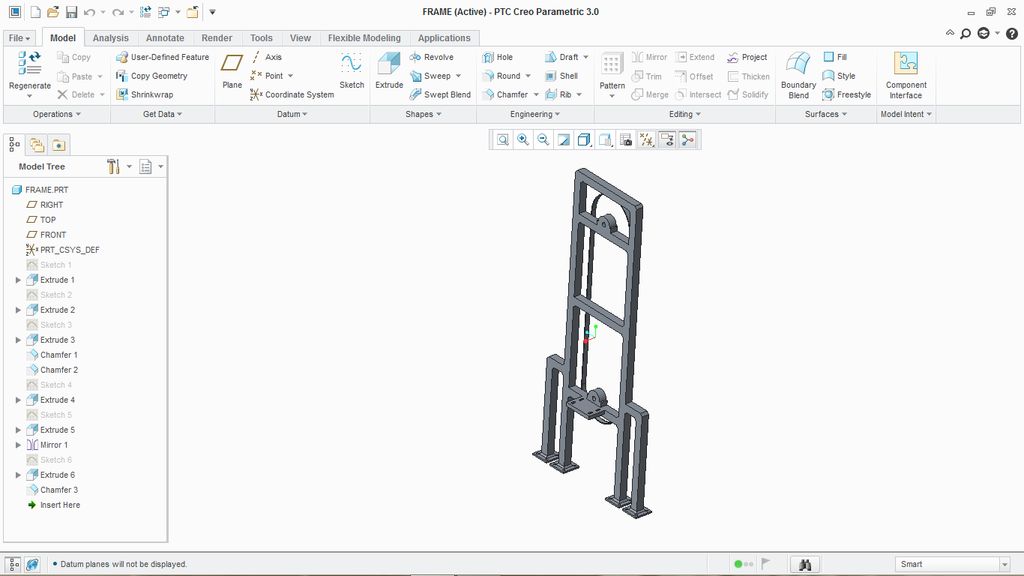
是保持的结构体整个旋转系统。
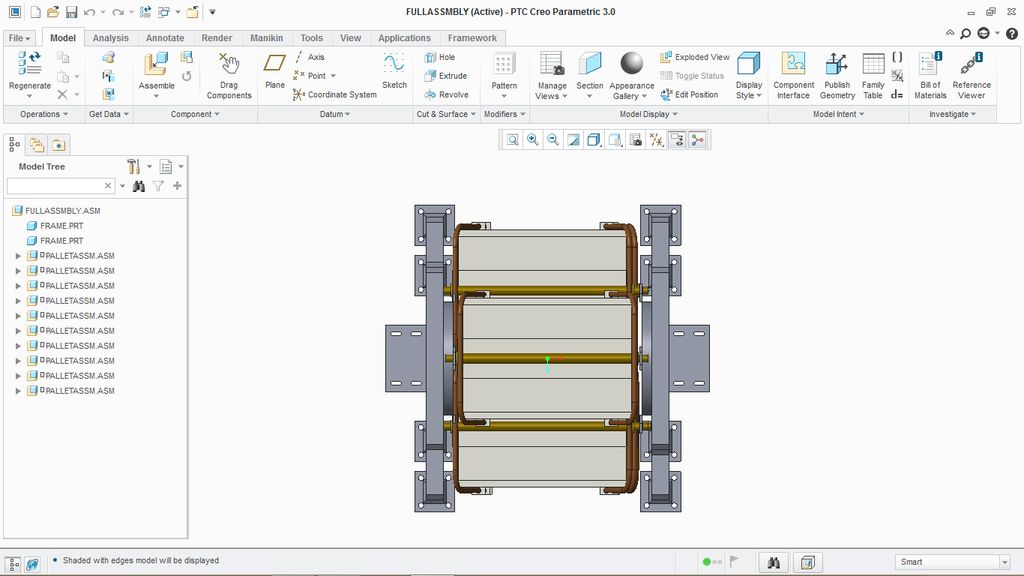
步骤11:托盘组装
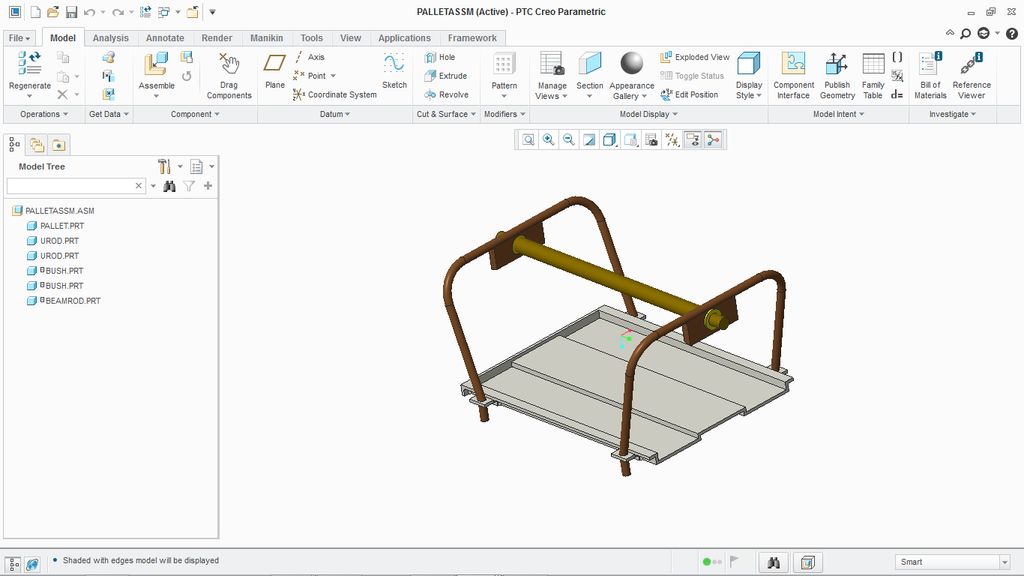
组装有梁的托盘底座以创建单个托盘。
步骤12:最终机械组装
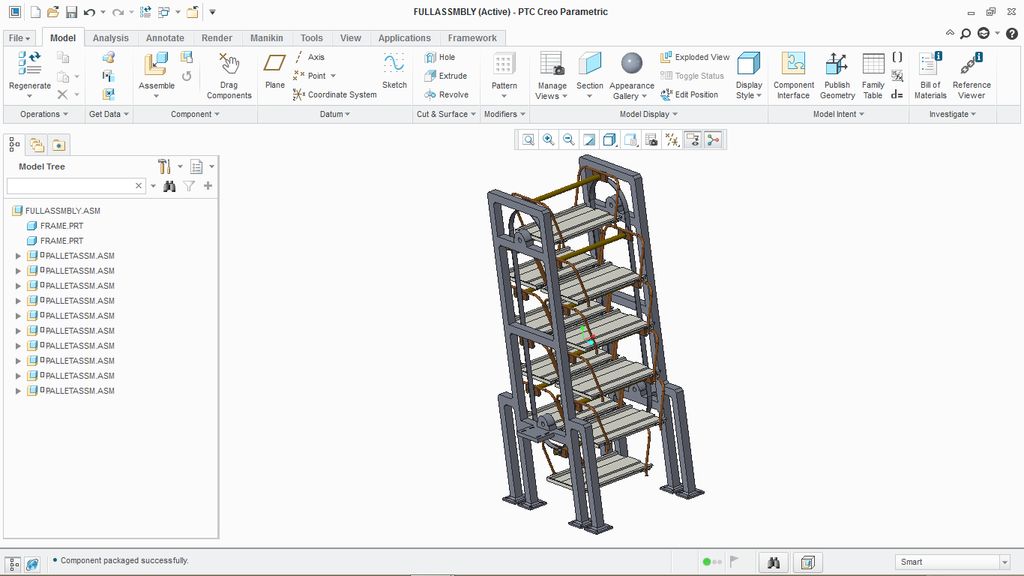
最后,所有货盘都已连接到框架,并组装了电动机连接器。
第13步:电子设计和编程(Arduino)
我们使用 ARDIUNO (我们的计划)。下一步将给出我们使用的电子零件。
系统功能是:
系统由一个小键盘组成,可以进行输入(包括校准)。
16x2 LCD显示输入值和当前位置。
电动机是由大容量驱动器驱动的步进电动机。
将数据存储在EEPROM中以进行非易失性存储。
电动机独立(有点)电路和程序设计。
使用双极步进器。
步骤14:电路
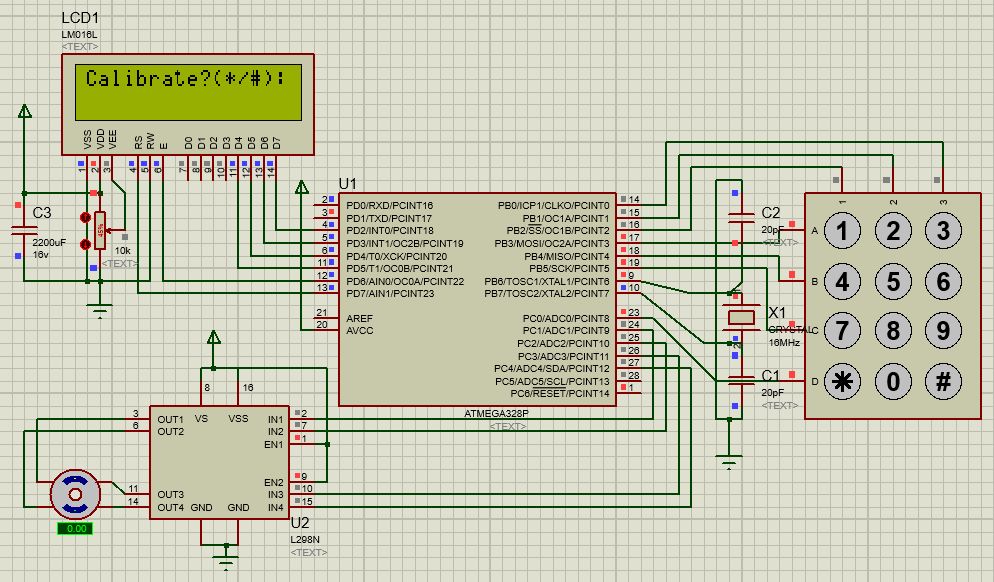
该电路使用Atmel ATmega328(也可以使用ATmega168或任何标准arduino板)。它使用标准库与LCD,键盘和电动机驱动器连接。
驱动器要求基于旋转系统的实际物理比例。所需扭矩必须事先计算,并且必须相应选择电动机。多个电动机可以用相同的驱动器输入来驱动。每个电动机都使用单独的驱动器。可能需要更多扭矩。
给出了电路图和变形方案。
第15步:编程
它
功能包括:
可调电动机速度(RPM)。
要使用的任何双极步进电机的每转值可更改步数。 (尽管最好使用200 spr或1.8度步进角电机)。
可调整的阶段数。
每个阶段的单独移动角度(因此,可以通过编程方式补偿制造中的任何错误)。
双向移动可实现高效操作。
可设置的偏移量。
存储设置,因此仅在首次运行时需要进行调整。
要对芯片(或arduino)进行编程,需要arduino ide或arduino builder(或avrdude)进行编程
编程步骤:
下载arduino bulider。
打开并从此处选择下载的十六进制文件。
选择端口和合适的板(我使用Arduino UNO)。
上传十六进制文件。
很好。
在arduinodev上有一篇很好的文章,关于将十六进制上传到arduino。
项目的源代码-Github源代码,您想使用Arduino IDE进行编译和上传。
步骤16:工作视频
步骤17:成本核算
总计成本约为9000印度卢比(根据dt-21/06/17约为140美元)。
组件成本随时间和地点而变化。因此,请检查您的本地价格。
责任编辑:wv
-
驱动器
+关注
关注
53文章
8259浏览量
146629 -
连接器
+关注
关注
98文章
14585浏览量
136792 -
电动机
+关注
关注
75文章
4115浏览量
96652
发布评论请先 登录
相关推荐
电脑制作私有云盘,电脑制作私有云盘的教程,个人云电脑是什么以及怎么连接
停车场反向寻车系统功能有哪些

室内停车场定位导航解决方案

蓝牙aoa助力打造智慧停车系统
浅谈智慧停车 停车场 智慧停车场方案

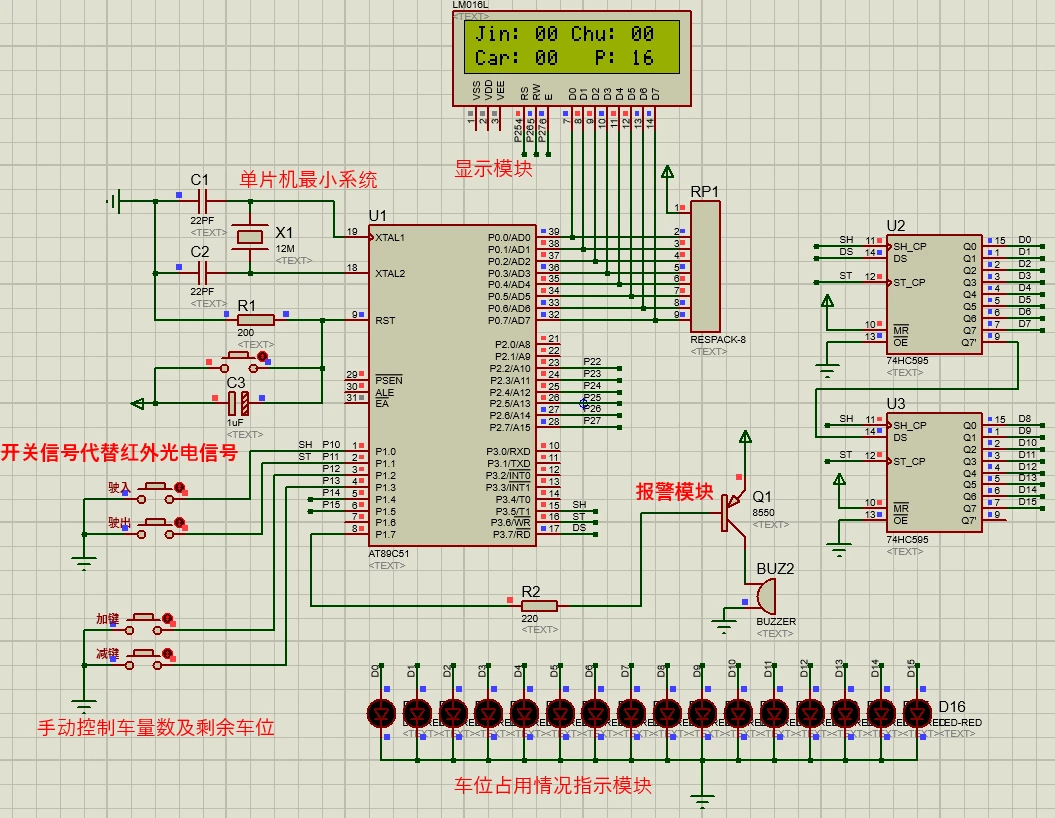
基于51单片机的停车场管理系统

智慧停车场可视化数据大屏,数字孪生城市停车
自动停车机器人,如何快速构建?

局域网语音对讲系统_IP广播对讲系统停车场解决方案
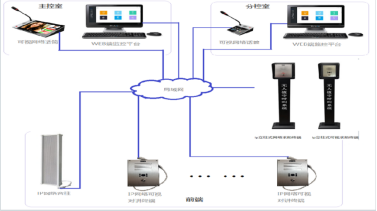
局域网语音对讲系统_IP广播对讲系统停车场解决方案
智能停车场物联网远程监控解决方案
缓解停车难!兆越智慧停车场管理系统让停车更“智慧”






 工商网监
工商网监
评论