 如何使用很少的组件制作arduino移动车
如何使用很少的组件制作arduino移动车
第1步:零件和工具
这些是所需的零件和工具。制作这辆机器人漫游车:
•微伺服器
•Hc sr04超声波传感器
•车轮2个电动和1个可以移动360度的车轮(如办公椅中使用的车轮)
•光传感器(CDS光电管)可选
•led可选
••Arduino UNO或类似产品••9伏电池到直流桶形适配器
•机器人底座(我使用了激光切割机丙烯酸片)
•9伏电池
•3d印刷伺服支架(我在本地Makerspace上挖了我的地壳)
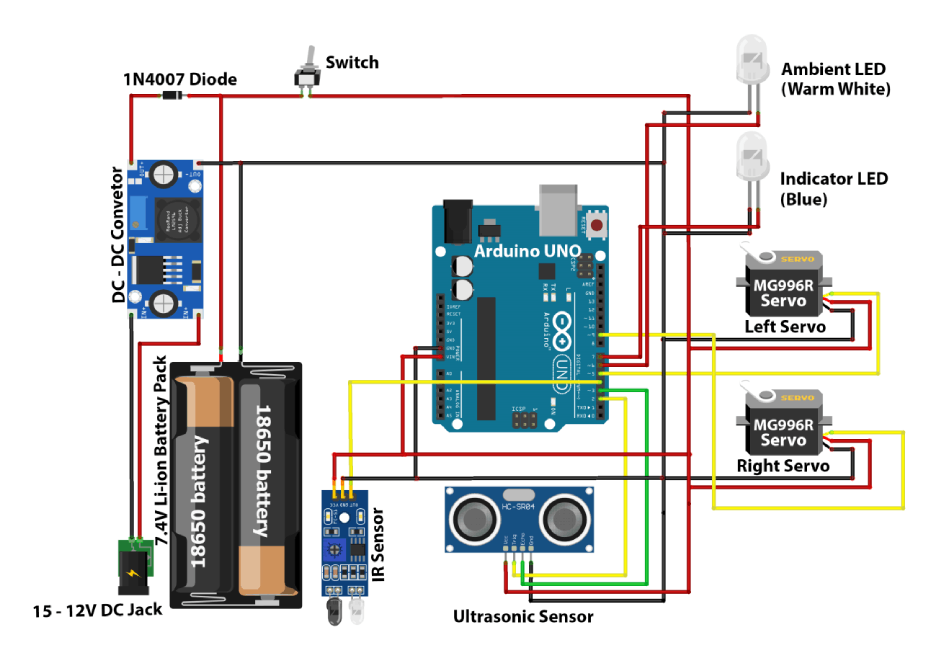
步骤2:将超声波传感器连接到Arduino
将Adafruit盾牌放在arduino上,然后将导线焊接到Ping传感器上的每个引脚上,您可以使用母头来完成此操作,但我发现直接焊接起来更容易。将VCC连接到五伏接地触发器到A4,并将回声连接到A5,将微型伺服连接到屏蔽板上的伺服2引脚
步骤3:连接每个电动机
将其中一个电机连接到电机4,将另一个电机连接到电机1。然后使用热胶,然后将非电动车轮上的胶粘到基座的前面
步骤4:将伺服胶粘到基座上
将微型伺服胶粘到在流动站的基座上,然后使用随伺服器提供的伺服喇叭,将其置于伺服器的顶部(确保伺服器位于中心位置),将伺服器安装座粘在伺服喇叭上,然后将其拧到伺服器上
第5步:将超声传感器推到安装座上
将超声传感器推到应该安装的安装座上
步骤6:编写Arduino
使用此代码:
步骤7:文件 H2》
文件:
http://www.thingiverse.com/thing:42499
此不是我的文件,我将全部归功于该文件的创建者wsolstice69
步骤8:其他功能:
这是我所包含的另一个功能代码中的:光传感器功能,可将光传感器连接到该流动站,当天黑时,它将打开LED,可以随意更改代码上的光敏阈值。
将LED插入A1并接地,将光传感器插入5伏,另一侧连接到10 kohm电阻,该电阻接地并连接到A0
步骤9:插入电池并将9伏电池的
插入到9伏直流桶式插头适配器中。开启它,它应该可以正常工作,但有时会击中墙壁,否则效果很好。
责任编辑:wv
-
机器人
+关注
关注
211文章
28597浏览量
207837 -
Arduino
+关注
关注
188文章
6477浏览量
187497
发布评论请先 登录
相关推荐
开源项目!打造一款FPV头部追踪相机,让你仿佛置身遥控车之中!
开源项目!基于 Arduino 的 MIDI 架子鼓
移动储能车远程监控管理系统
车用多芯片组件AEC-Q104规范

开源项目!基于Arduino做的“鱿鱼游戏”BOSS面具,支持动作检测
北京移动与蘑菇车联携手构建车路云网络
开源项目!基于 Arduino DIY 漂亮的宏机械键盘
idf-arduino component组件怎么设置 ?
求助,在esp-idf中使用arduino作为组件后怎样使用arduino的库?
S2GO_3D_TLE493DW2B6-A0无法与Arduino UNO一起工作是怎么回事?
如何用Arduino制作一个简易自动喂鱼器
如何制作自己的Arduino电容计

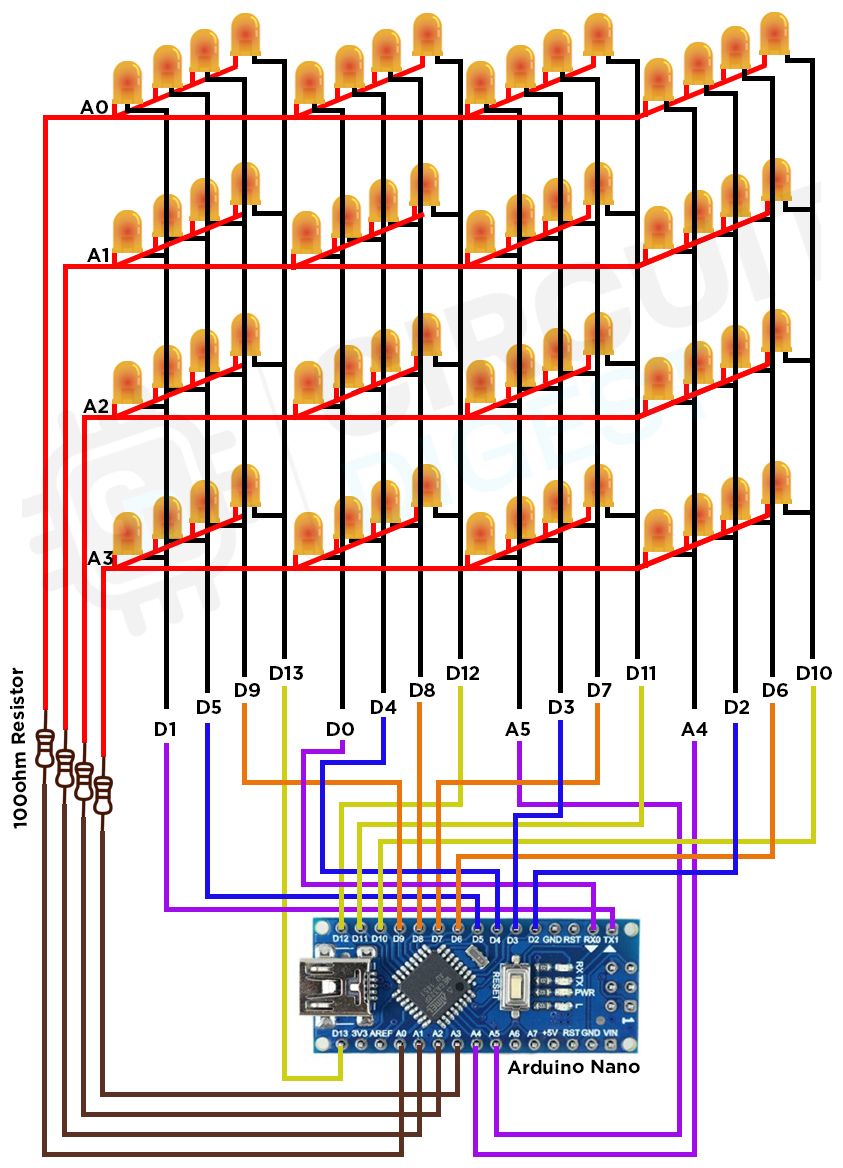
使用Arduino Nano制作一个4×4×4 LED立方体





 工商网监
工商网监
评论