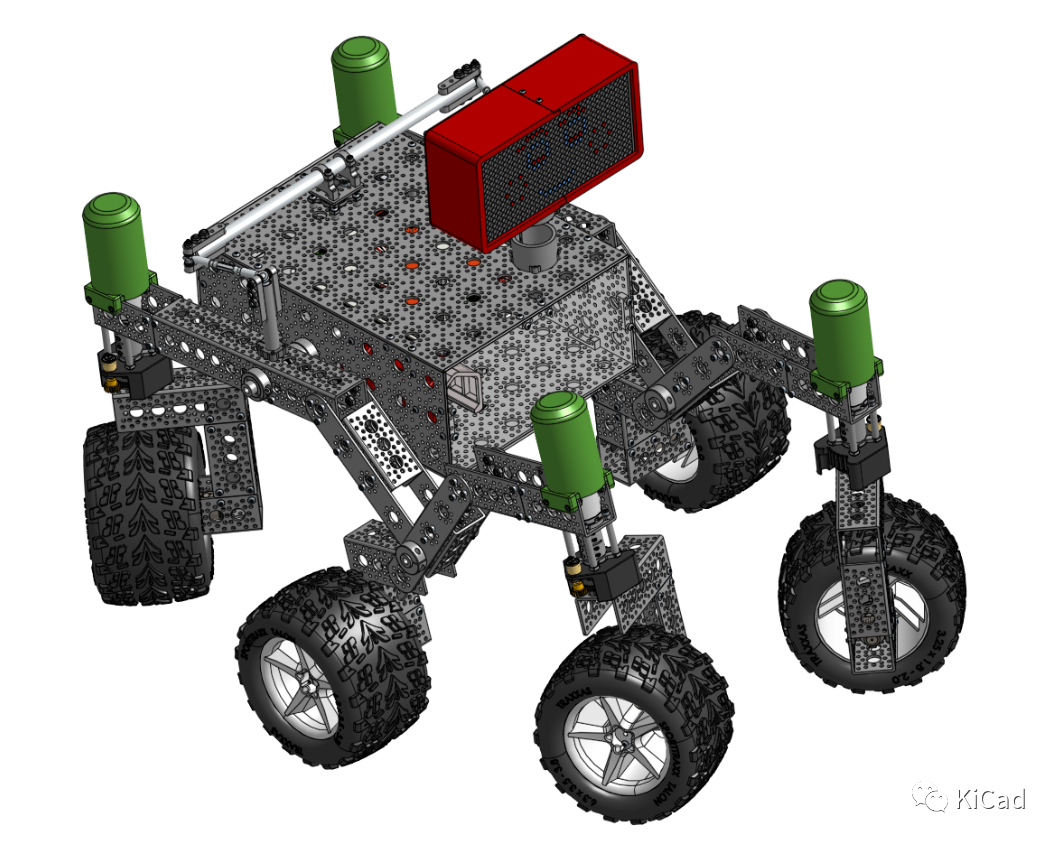
 自主漫游车的制作
自主漫游车的制作
步骤1:准备
步骤2:所需的零件
执行此项目所需的零件清单
1。树莓派(B +,2,3)
2。 wifi加密狗(如果使用Rpi B +。其他型号带有内置的wifi模块)
3。 Arduino uno
4.L293D或其他类似的电机驱动器
5.webcam(如果需要)
6.wifi路由器
7显示器,键盘,鼠标(仅用于第一次安装Raspberry pi)
8。机箱,用于制造流动站的电动机
9.Lipo电池11.1v,充电器
10。内置电池消除器的电池消除器11.1v至5vdc或ESC
第3步:主要概念
我计划以两种可操作的方式做到这一点(简单高级)。这个可以指导的步骤解释了建立一个可以通过wifi网络进行控制的标准漫游车的步骤。其中较难的一项将涵盖ROS,图像处理和导航
主要思想:
使用ssh和vnc服务器,我们将连接计算机与内置树莓派并将控件发送到电动机
步骤4:所需软件
1.raspbian操作系统(按照以下说明为树莓派闪存存储卡https://www.raspberrypi.org/documentation/installa.。.)
2.ssh客户端:用于Windows (putty http://www.chiark.greenend.org.uk/~sgtatham/putty/。..)for ubuntu(sudo apt install openssh-client)
3.install arduino for raspberry pi(
4.xtightvncviewer:对于Windows(http://www.tightvnc.com/download.php)
有关详细信息,请参见下一张幻灯片
步骤5:准备Raspberry Pi

1。遵循以下步骤(仅用于简单步骤)来刷新存储卡并安装raspbian操作系统
将RPI连接到显示器,键盘和鼠标(仅用于开始)
打开终端和
2。运行sudo apt-get update和sudo apt-get update(仅限第一次)
3。安装vncserver(sudo apt-get installightentvncserver)
4。安装Arduino ide(sudo apt-get install arduino)
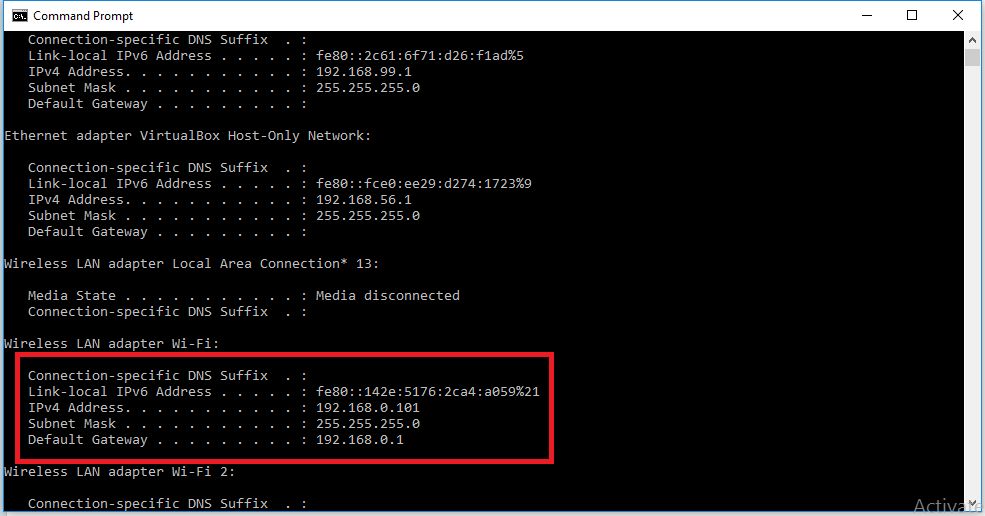
出于远程操作树莓派的目的,我们需要设置具有恒定IP地址的WiFi连接。您需要一个wifi路由器(或hotspot)将pi连接到它(wifi加密狗或内置wifi模块)
在终端中使用此cmd打开dhcpcd.conf
sudo nano/etc/dhcpcd.conf
输入以下
接口wlan0
静态ip_address = 192.168.0.130/24
静态路由器= 192.168。 0.1
(请注意,系统的IP地址和静态路由器将更改。在设置此地址之前,请检查路由器网关)
在此图片中,您可以看到默认网关和我的ip 192.168 .0.101 。..将最后一个101更改为130
立即重新启动树莓派
sudo shutdown -h现在
再次打开它
现在您的wifi应该会自动连接(前提是您已经使用密码手动将其连接了一次)
步骤6:为Windows准备系统
1.install putty http://www.chiark.greenend.org.uk/~sgtatham/putty/。..下载适用于Windows 32或64位的正确版本并安装。.(简单安装仅限:))
2.install xtign tvncviewer http://www.tightvnc.com/download.php
就是这样。.将相同的wifi网络
连接到ubuntu
1。安装xtightvncviewer apt-get安装vncviewer
连接到同一个wifi网络,我们很高兴
步骤7:Ssh连接





1。打开树莓派
2。打开腻子
3。键入我们之前设置的树莓派的IP地址并连接
4。输入用户名树莓派的密码和密码(默认用户名:pi PASS:树莓派)
5。您应该看到如下图所示的终端窗口
6。输入此命令以启动ssh服务器
vncserver:1 -geometry 720x640 -depth 24
注意:第一次,系统会要求您设置ssh客户端的密码
Windows
打开xtightvncviewer(这也会要求您设置密码)
在对话框中,输入RPI ip地址,后跟:1
mine is 192.168.0.130:1
我的IP,然后加上:1
在对话框中输入密码
现在您应该会看到RPI屏幕。如果没有,请检查您与wifi的连接并检查RPI ip地址
步骤8:ARDUINO
从计算机或RPI
就这样
第9步:硬件连接
观看我的视频,了解如何建造这辆漫游车
步骤10:最后一步

我们已经完成了所有艰苦的工作。现在,如视频所示。只需打开我们的RPI监视器(xtightvncviewer),打开arduino ide并转到串行连接窗口,然后输入命令
f-转发
b-反向单词
r& l-左右转弯
s-停止
第11步:结论
我们刚刚完成了第一辆遥控漫游车只使用一些开源软件。在我的下一个指导中,我将教您如何使用ROS和图像处理技术来进行自主流动站,而无需更改流动站中的任何内容。
责任编辑:wv
-
路由器
+关注
关注
22文章
3734浏览量
113949 -
Arduino
+关注
关注
188文章
6471浏览量
187293 -
树莓派
+关注
关注
117文章
1708浏览量
105704
发布评论请先 登录
相关推荐
保隆科技空悬项目获得自主品牌车企定点
中国中车Laaeffrs 560.6型汽车运输车通过欧盟TSI认证
Made with KiCad(十二):JPL开源漫游车
深入解析:WiFi 6与WiFi 7无线漫游技术及其实施方案

全国产自主可控车规MCU发布!使用RISC-V内核,进入动力安全域应用
全国产自主可控高性能车规级MCU芯片正式发布

全国产自主可控高性能车规级MCU芯片发布
怿星实车OTA测试设备介绍

UWB测距典型应用:人车测距防撞
请问ESP32-AT支持Wi-Fi漫游指令吗?
CYW43455同时多台设备测试漫游切换功能,测几百次有个别设备会概率性的断线,为什么?
中微半导自主研发的车规级高品质32位MCU,已通过AEC-Q100认证

丰田将研发新型加压月球漫游车
比无缝漫游更高级的无感漫游,你听说过吗?

兆越双5.8G无缝漫游技术引领AGV智能仓储新升级






 工商网监
工商网监
评论