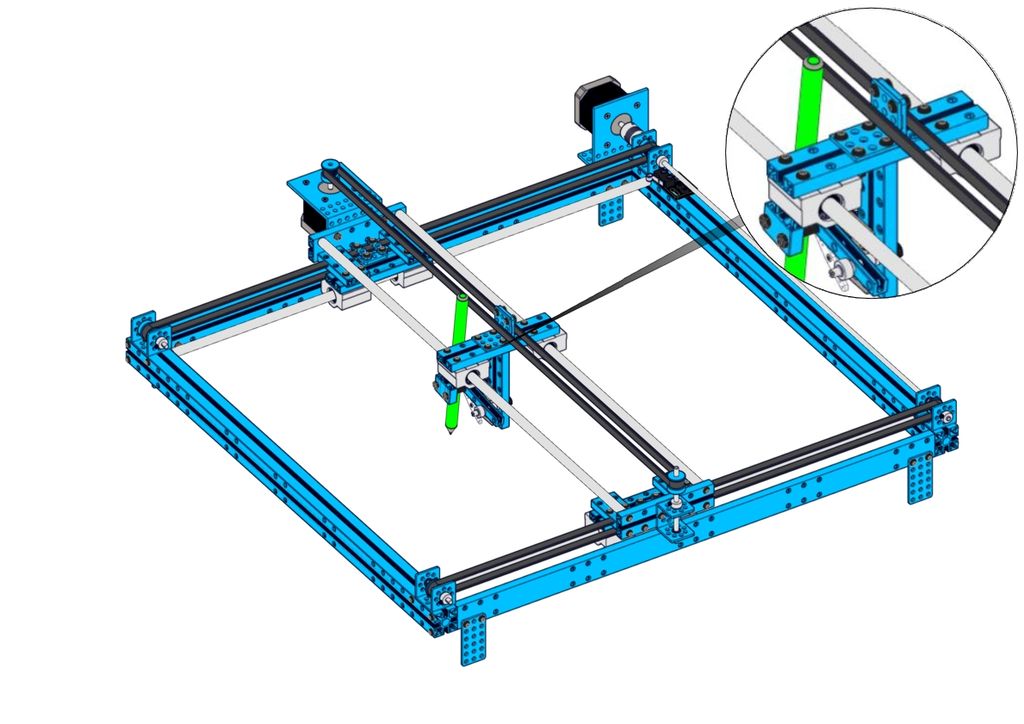
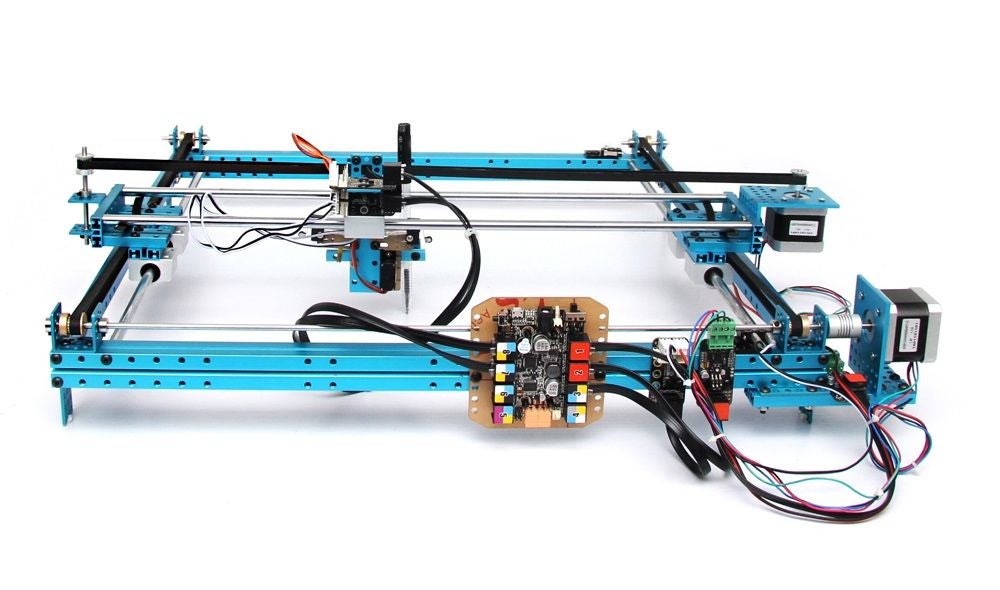
 如何组装XY绘图仪2.0以及如何使用Gremote运行
如何组装XY绘图仪2.0以及如何使用Gremote运行
步骤1:材料列表和工具列表
机械零件清单:
1。光束0824-16 x1
2。光束0824-48 x4
3。光束0824-80 x1
5。光束0824-96 x4
6。光束0824-112 x2
7。光束0824-496 x2
8。光束0808-80 x1
9。 Beam2424-504 x2
10。支架3x3 x2
11。板3x6 x5
12。支架U1 x5
13。皮带连接器x3
14。 42BYG步进电机支架x2
15。 K-Power 9g微型伺服x1
16。 42BYG步进电机x2
17。定时皮带轮18T x6
18。开放式正时皮带(1.3m)x3
19。 D轴4x56mm x2
20。螺纹轴4x39mm x1
21。轴环4mm x10
22。挠性联轴节4x4mm x1
23。直线运动轴D8X496mm x4
24。直线运动滑块8mm x6
25。法兰轴承4x8x3mm x10
26。十字螺丝刀3mm x1
27。螺母M4 x50
28。沉头螺钉M3x8 x10
29。无头固定螺钉M3x5 x26
30。塑料铆钉R4060 x16
31。塑料铆钉R4100 x6
32。塑料环4x7x2mm x20
33。螺母M2 x3十字槽盘头螺钉M2×10 x3
34。内六角圆柱头螺钉M4×14 x30
35。内六角圆柱头螺钉M4×16 x28
36。内六角圆柱头螺钉M4×22 x12
37。内六角圆柱头螺钉M4×30 x18
38。内六角圆柱头螺钉M4×8 x36
39。基本支架x1
40。 LS支架V2.0 x4
41。 9g微型伺服支架x1
42。直线运动轴D4x512mm x1
43。直线运动轴D4x80mm x1
44。十字槽盘头自攻螺钉-C ST 2.2×9.5 x10
45。可剪切链接3 x6
46。尼龙扎带2 * 100 x30
47。 橡皮筋x5
电子列表:
1。 Me-Baseboard x1
2。 Me步进电动起子V1.0 x2
3。 RJ25适配器x3
5。微型开关按钮x4
6。 6P6C RJ25电缆20厘米x2
7。 6P6C RJ25电缆-35厘米x1
8。 6P6C RJ25电缆50cm x2
9。 USB A公头到B公头电缆x1
工具:
1。六角螺丝刀2.5mm x1
2。 十字螺丝刀3mm x1
3。 扳手7mm x1
4。 HEX内六角扳手1.5mm x2
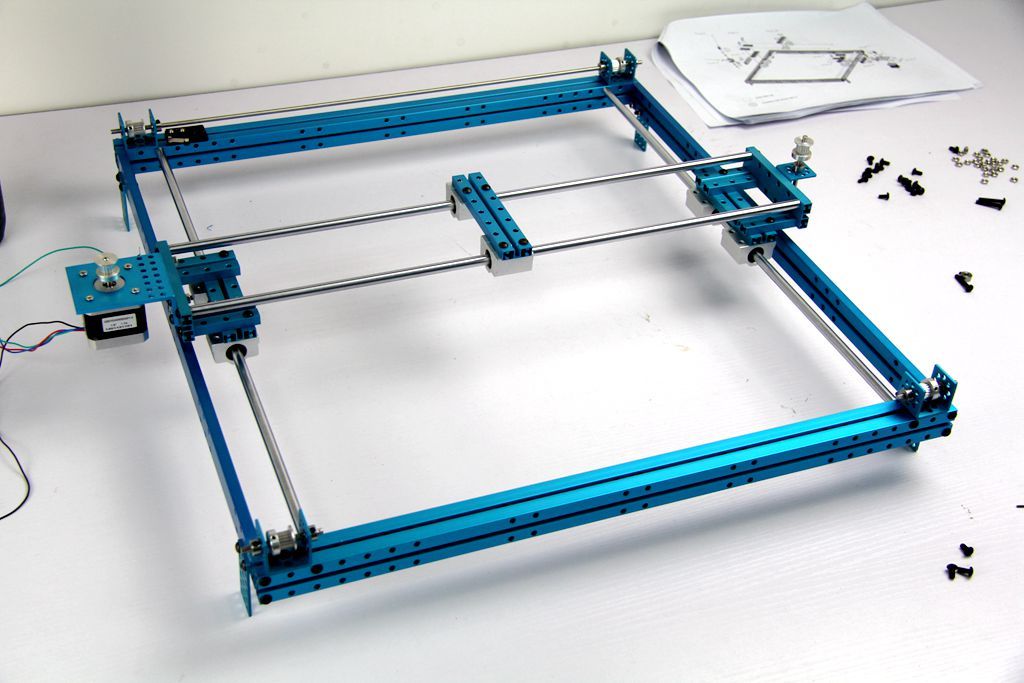
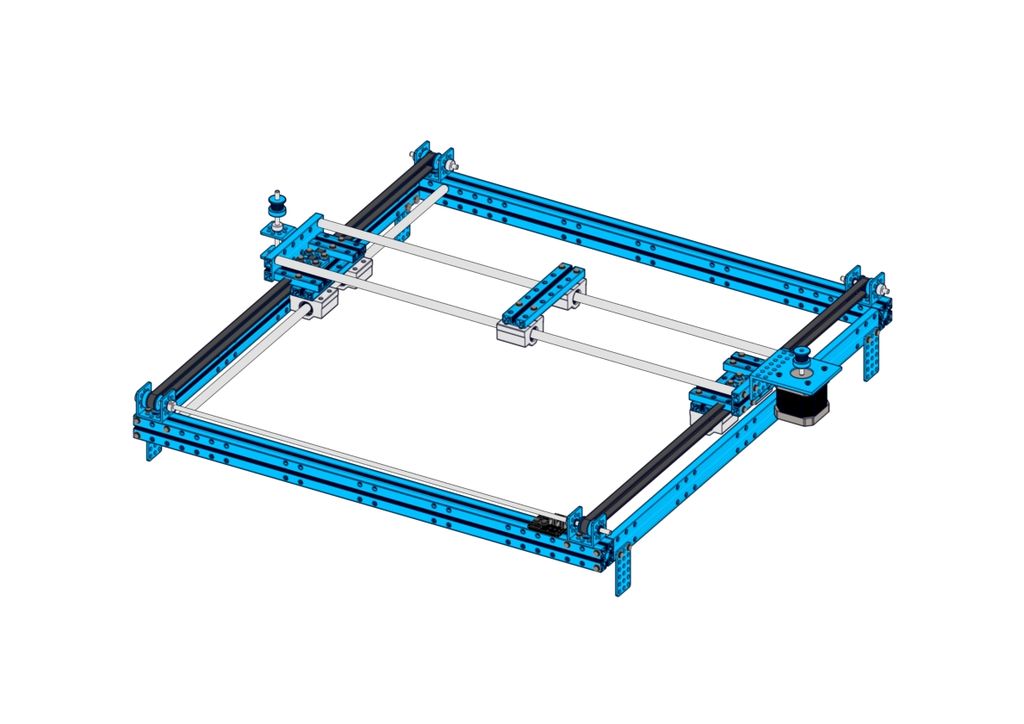
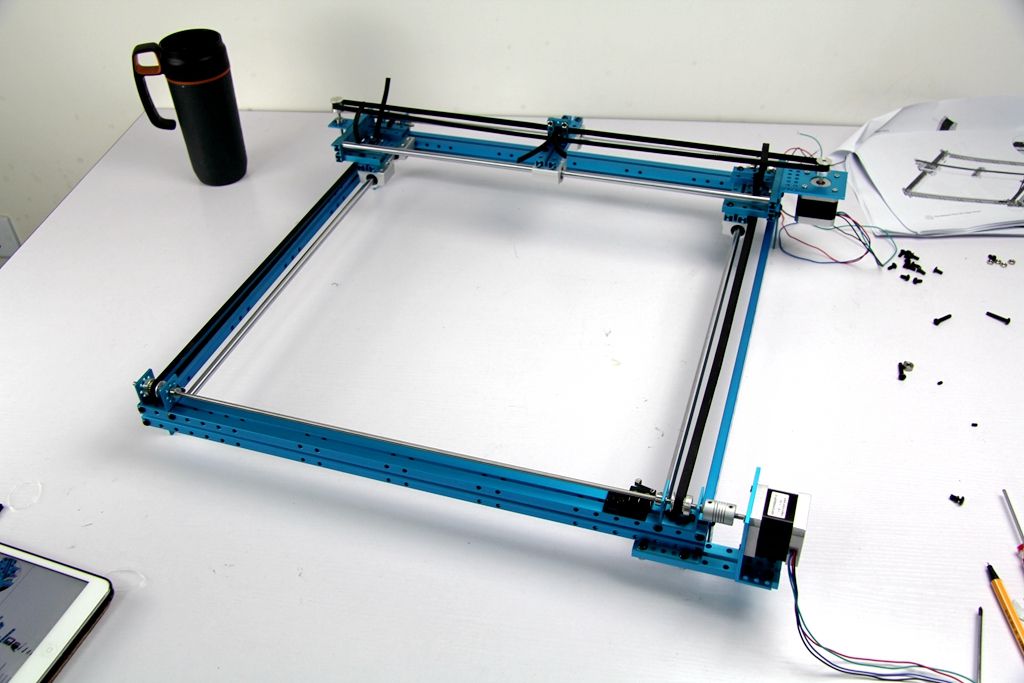
步骤2:框架和Y轴
材料列表
1。光束0824 496 x2 2。梁2424 504 x2
3。直线运动轴D8x496mm x2
4。直线运动滑块8mm x4
5。板3×6×4 6。螺钉M4x14 x8
7。螺钉M4x30 x12
8。螺母M4 x8
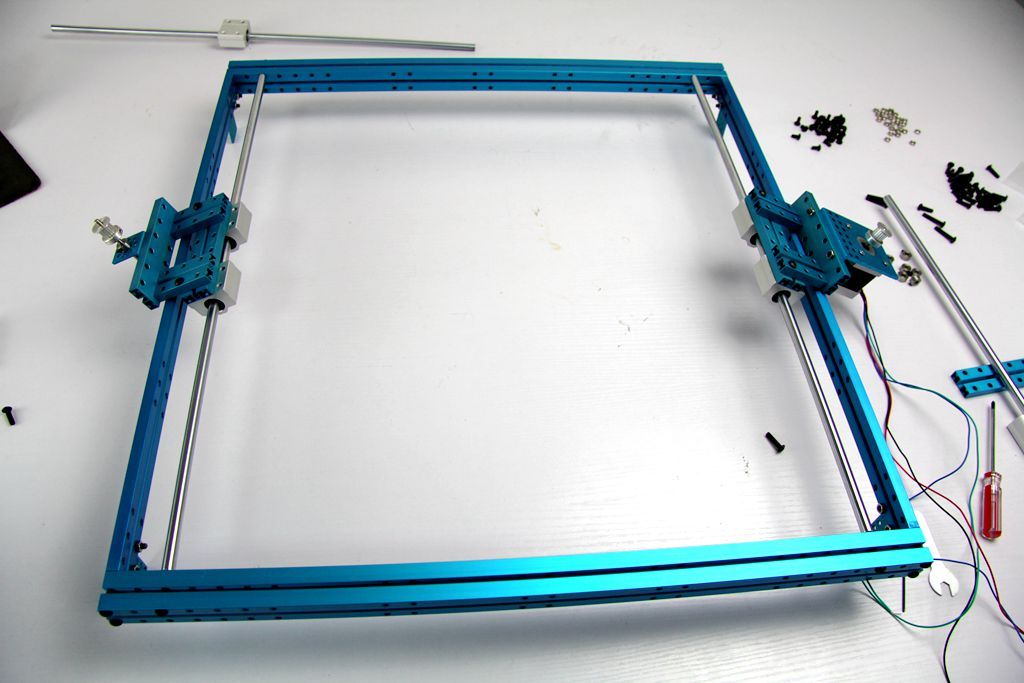
程序
提示,请不要颠倒步骤#1和步骤#2的顺序。如果是这样,螺钉14和30将会干涉。
1。首先,我们将梁3x6作为支撑架安装在beam0824上,我们使用螺钉M4x14和螺母M4 x8。
2。用螺钉M4x30连接beam2424和beam0824。重复两次,您将获得框架。
3。将线性运动滑动装置放在轴上,然后用螺钉M4x30将轴固定在框架上。
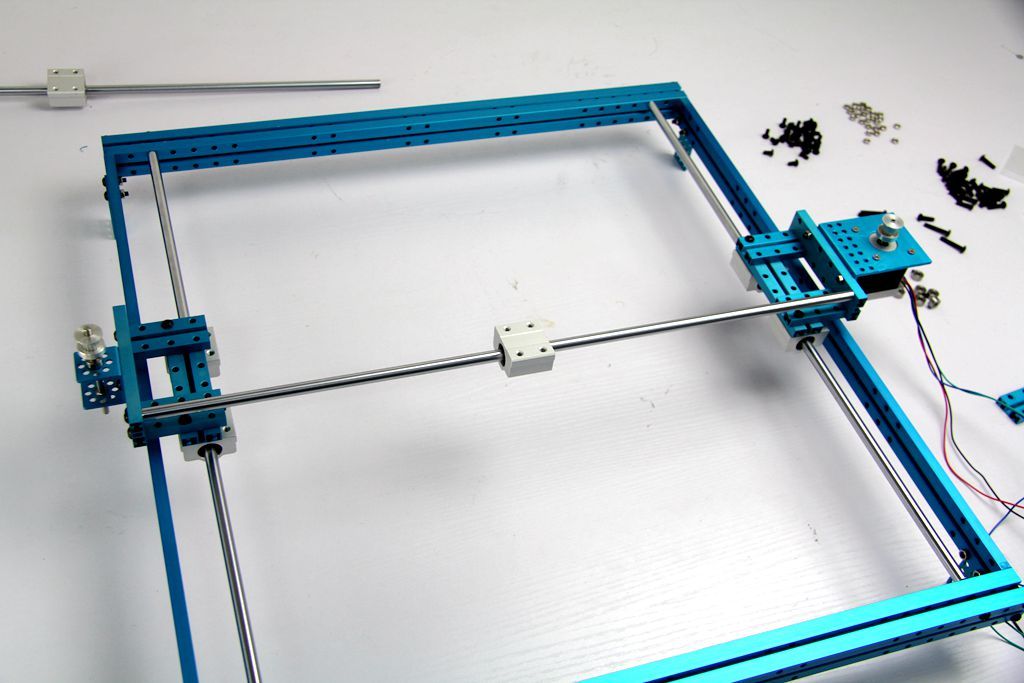
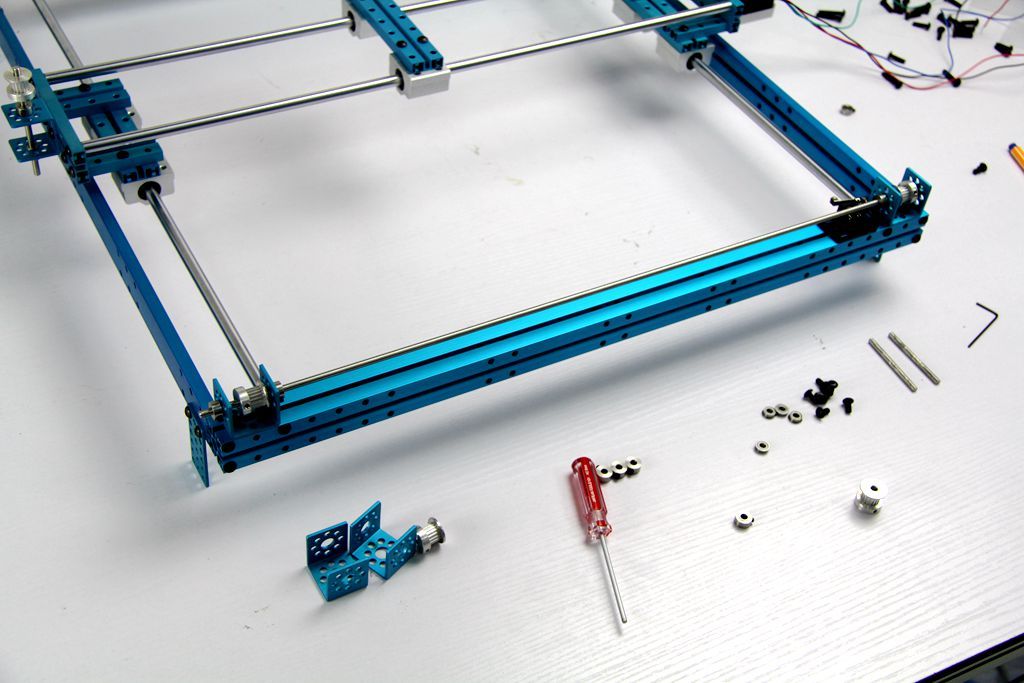
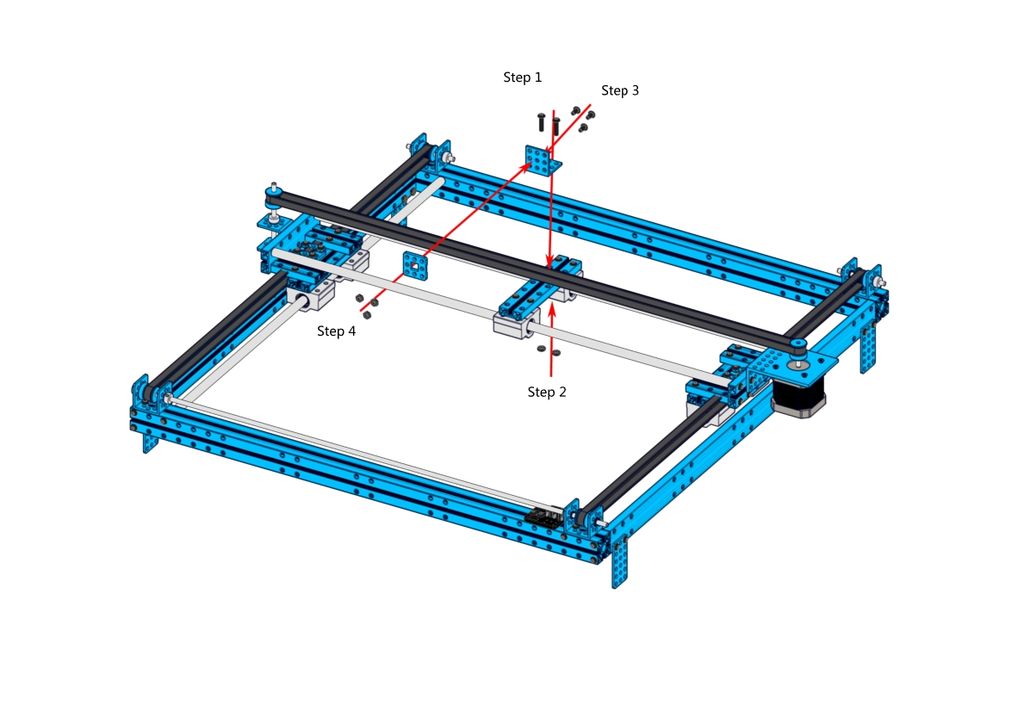
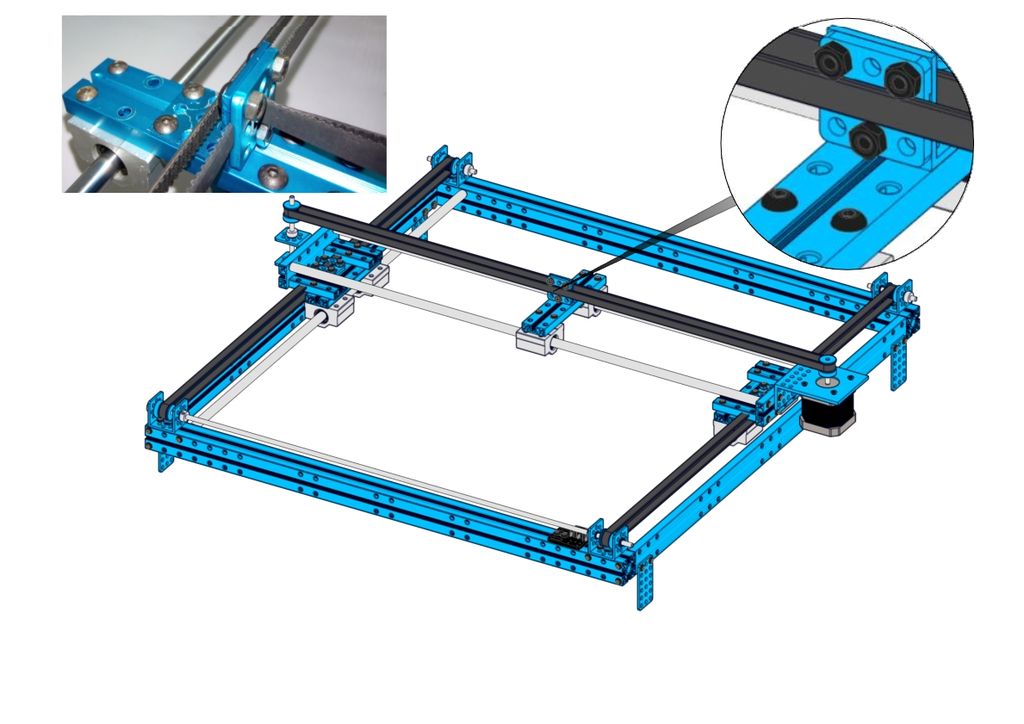
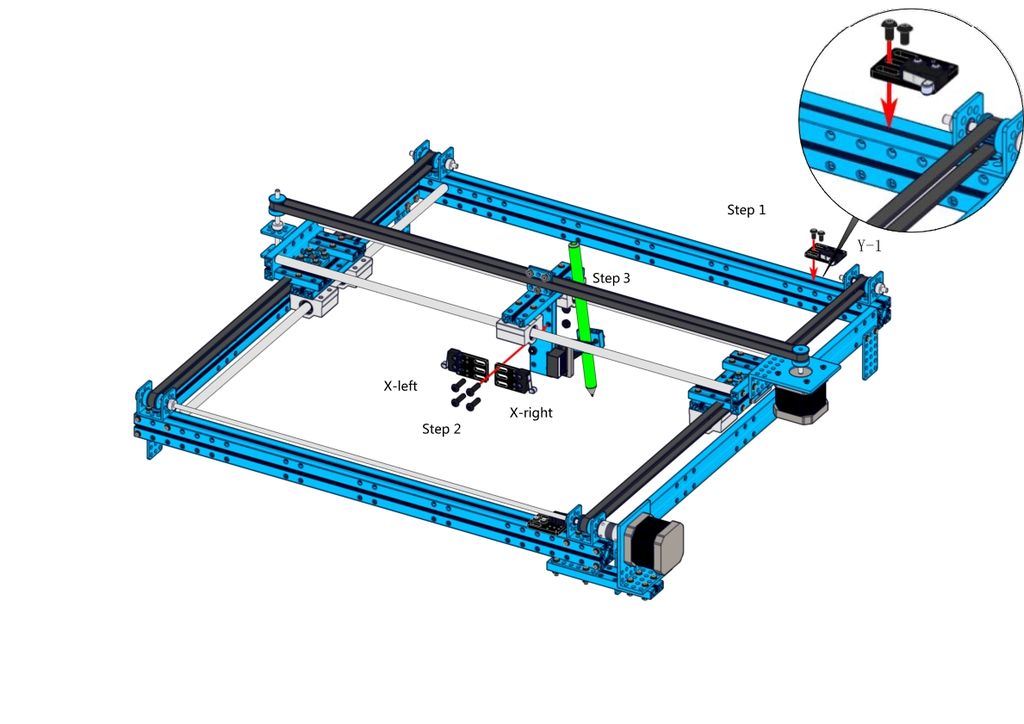
步骤3:构建X轴
材料列表
1。直线运动轴D8x496mm x2
2。直线运动轴D4 x80mm x2
3。 42BYG步进电机支架x1
4。 42BYG步进电机x1
5。光束0824 48 x4 6。光束0824 128 x4
7。光束0824 144 x1
8。直线运动滑块8mm x2
9。法兰轴承4x8x3mm x2
10。无头固定螺钉M3x5 x4
11。螺母M4 x2
12。螺钉M4x8 x5
13。螺钉M4x14 x16
14。螺钉M4x16 x2
15。螺钉M4x22 x8
16。沉头螺钉M3x8 x4
17。轴环4mm x2
18。定时皮带轮18T x2
19。托架U1 x1
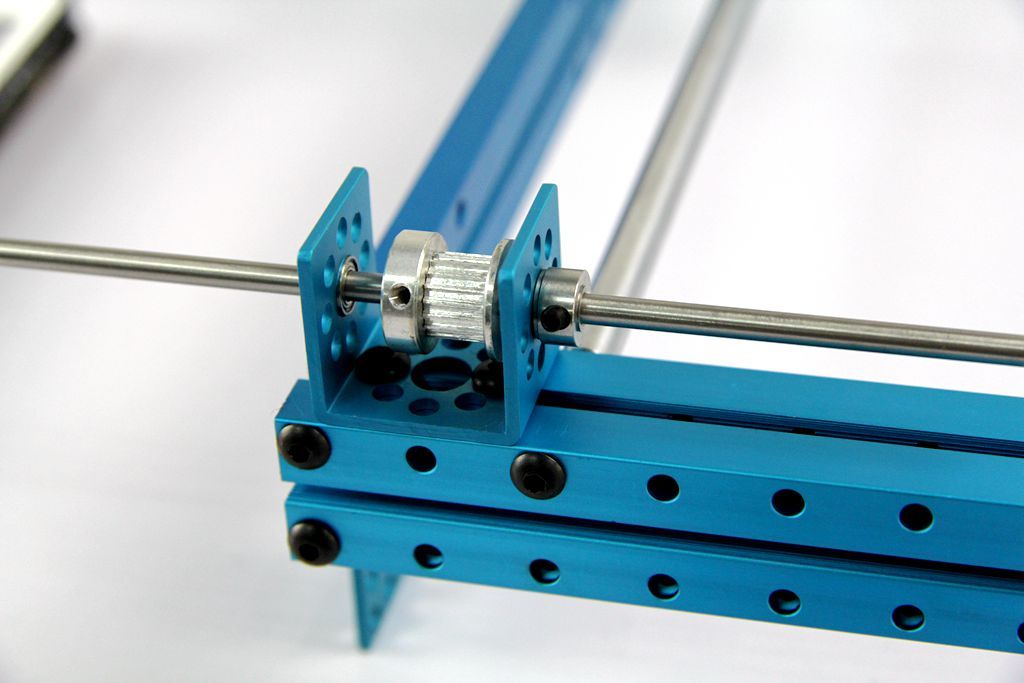
过程
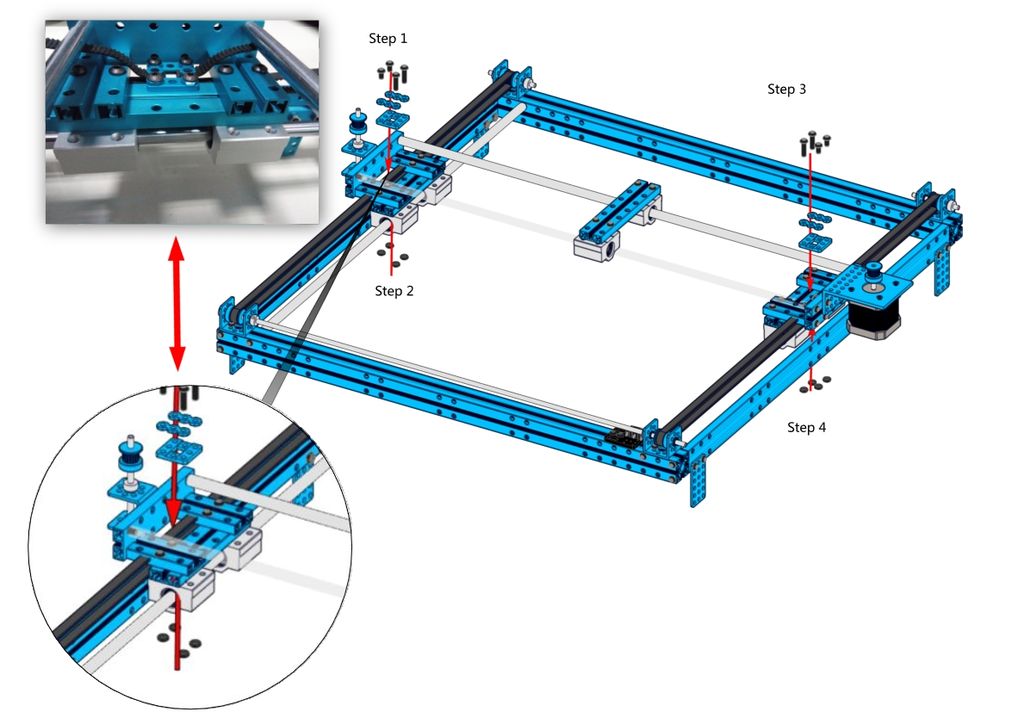
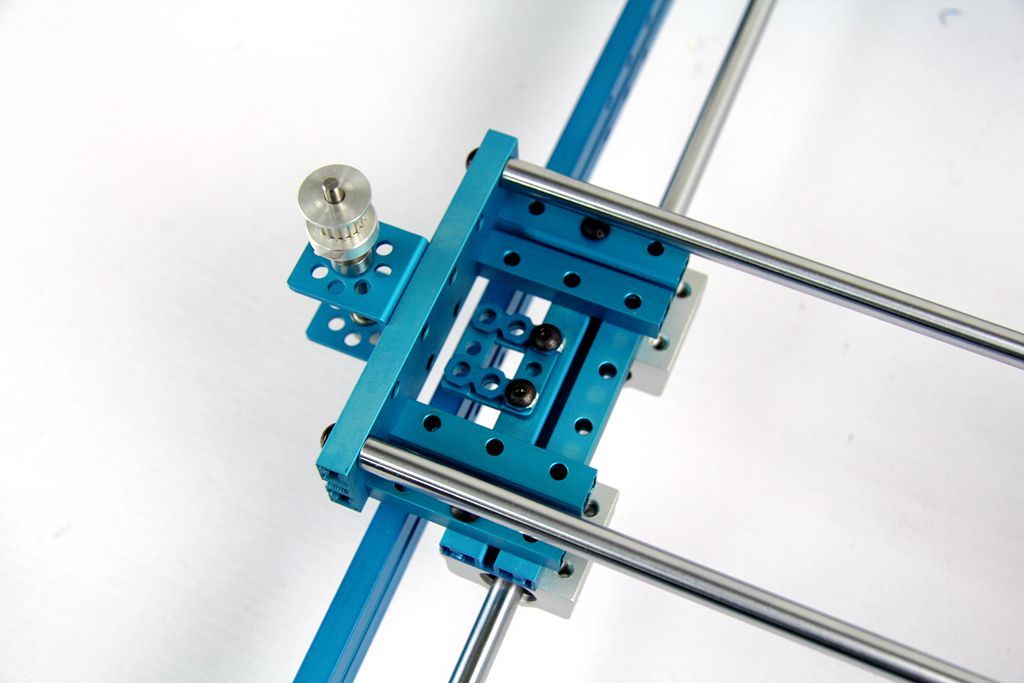
提示。您可以按照第二张图片完成安装。
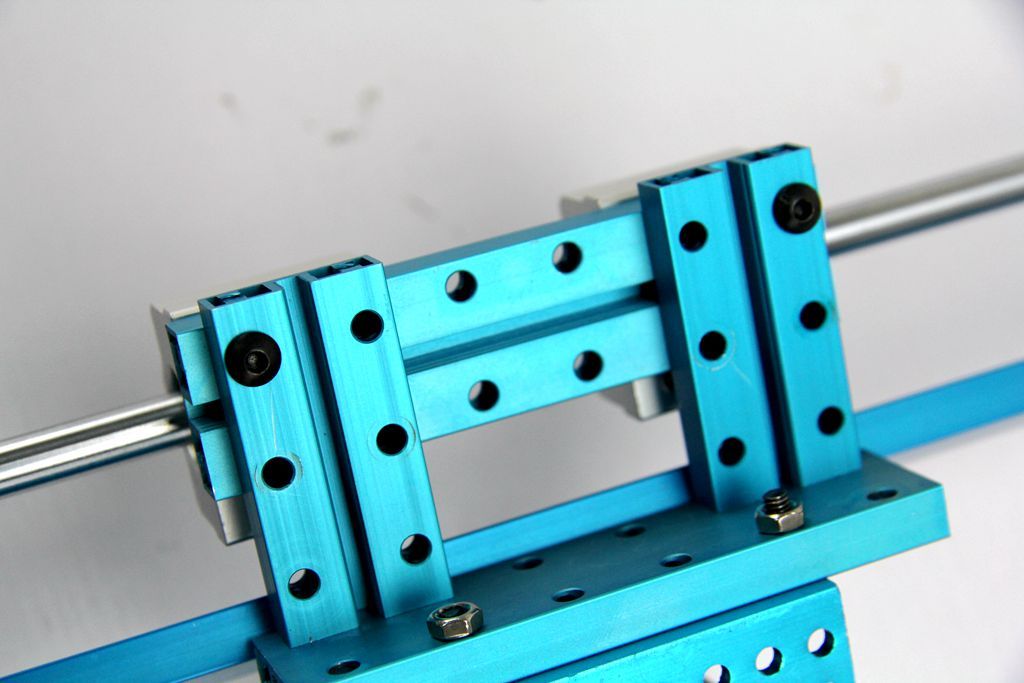
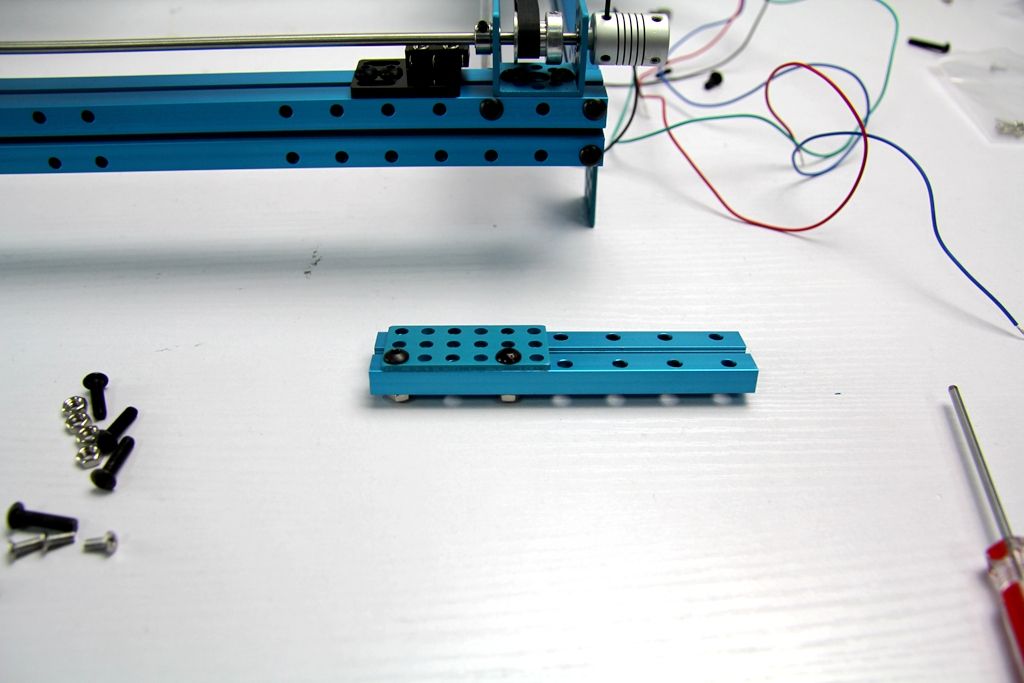
1&2。建立左平台。这两个平台用于连接X轴和Y轴。您只需要Beam0824 48、128、144和一些螺钉和螺母。
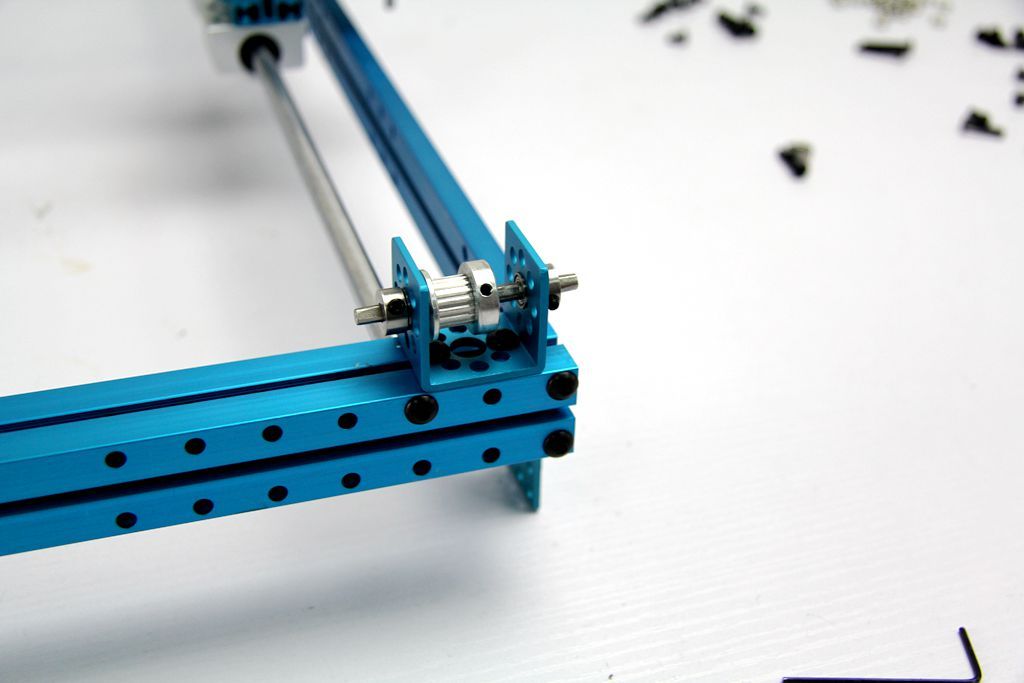
3。组装“祈祷轮”。首先,用无头紧定螺钉M3将正时皮带轮18T固定在轴80mm上。完成此操作后,零件的顺序应为正时凸角18T-》轴套-》法兰轴承-》支架U1-》法兰轴承-》轴套。
4。将“祈祷轮”固定在左侧平台的螺纹槽中。
5&6。建立合适的平台。请注意,左右平台之间存在一些差异。
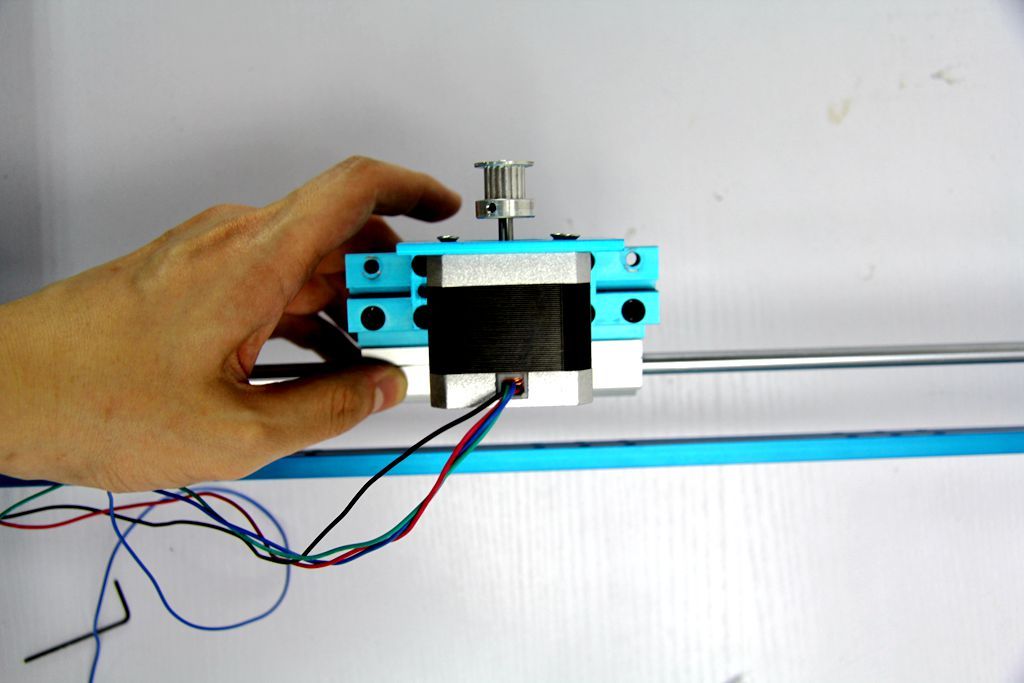
7。通过沉头螺钉M3x8将步进电机固定在步进支架上。
8&9。将步进电机安装在正确的平台上。然后,将定时皮带轮18T固定在步进电机上。
10。将滑动单元放在轴上,并将x轴轴固定在平台上。
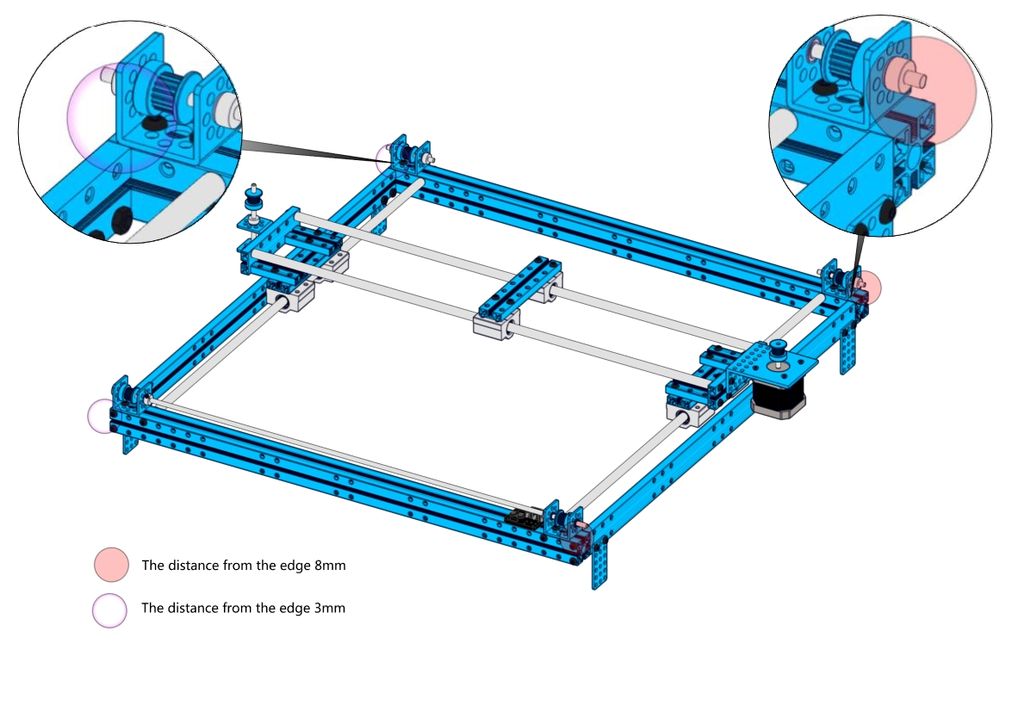
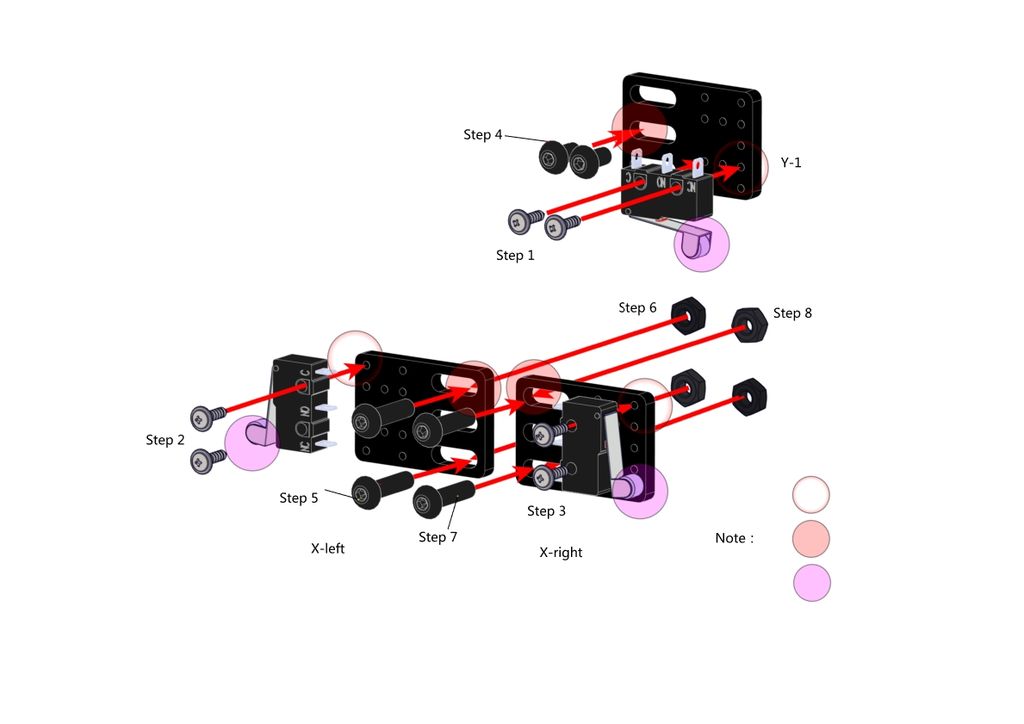
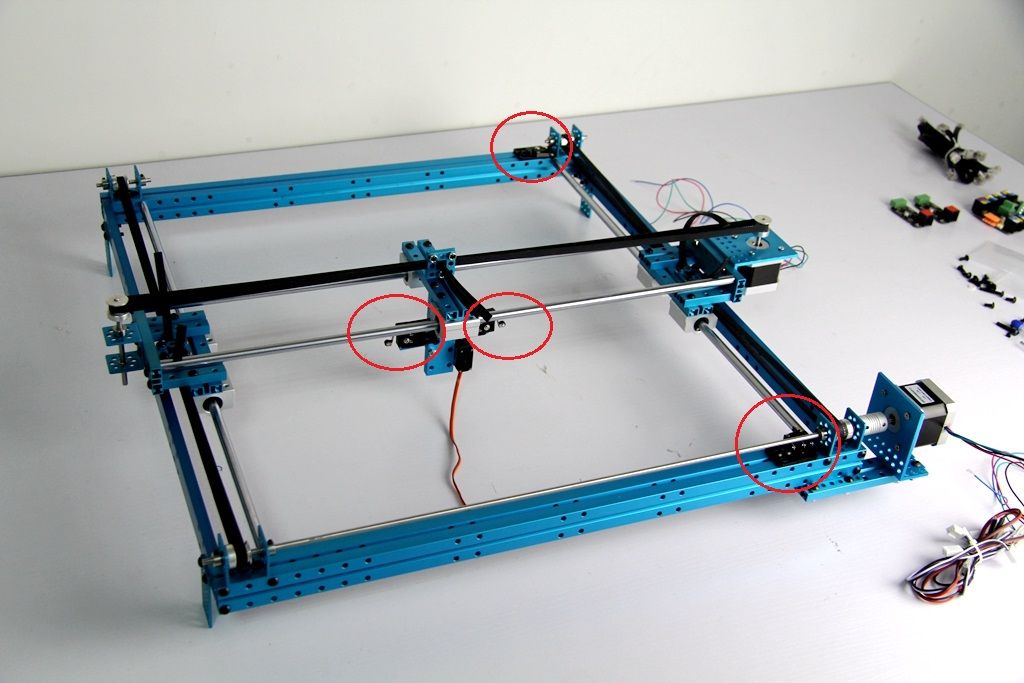
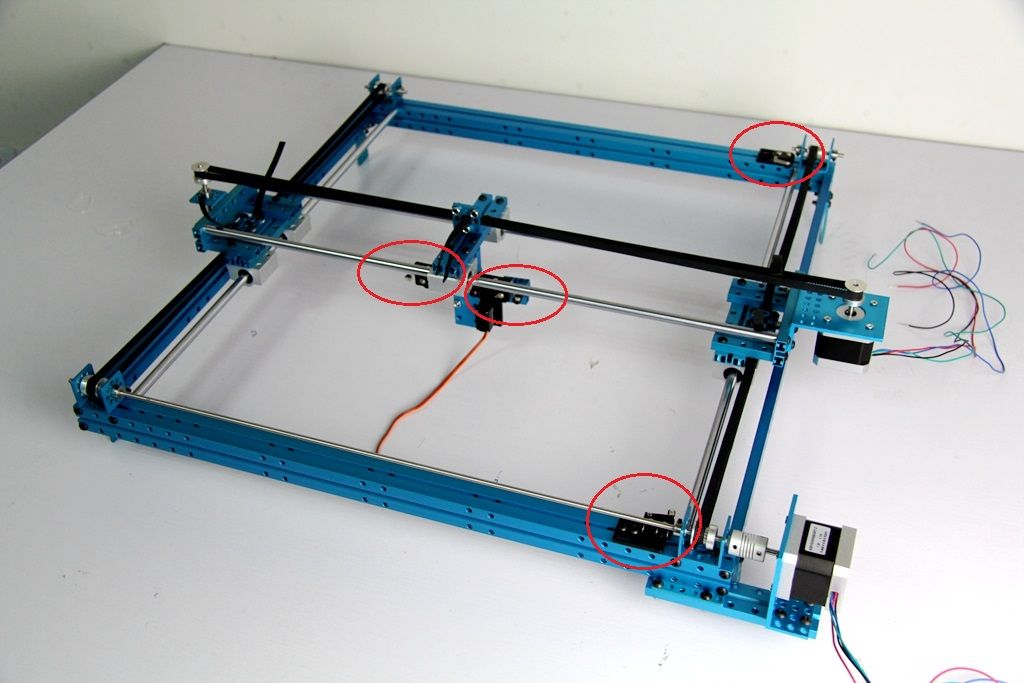
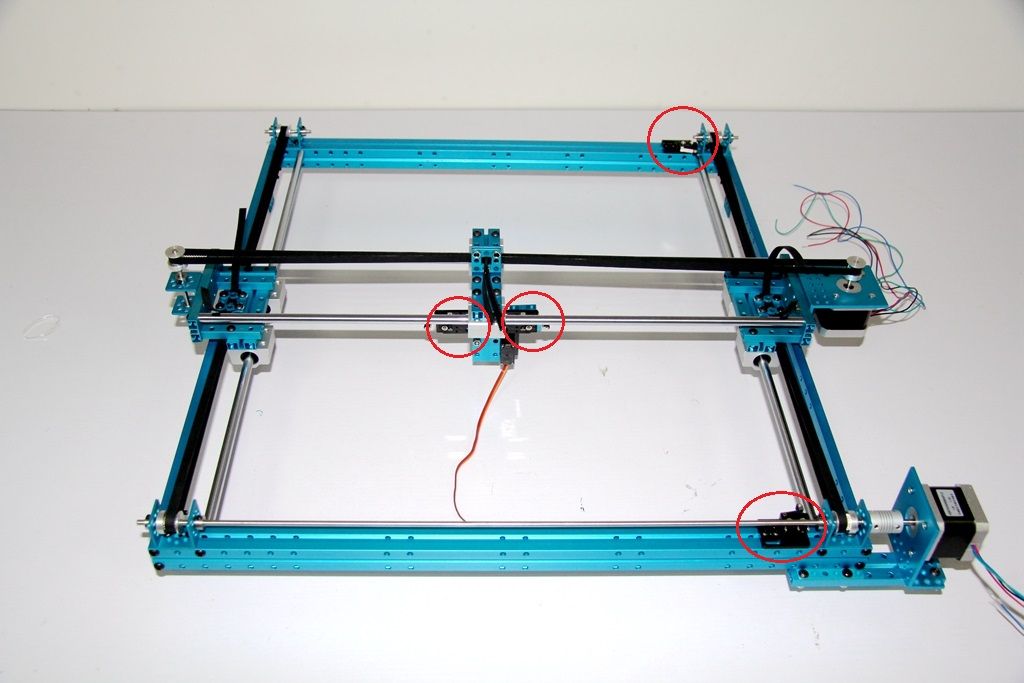
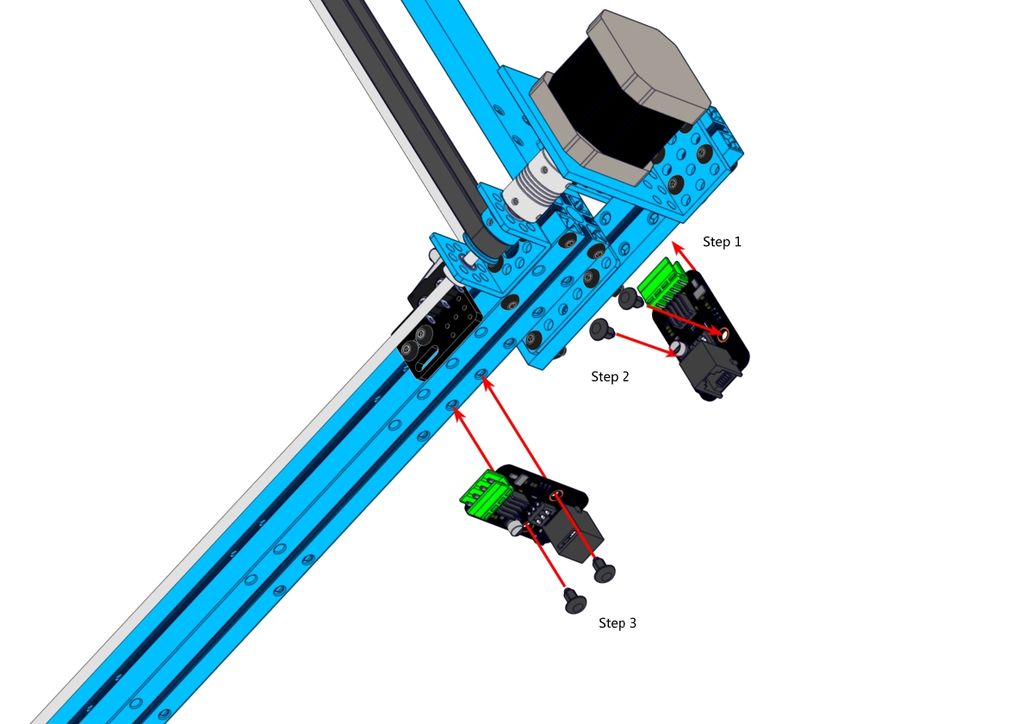
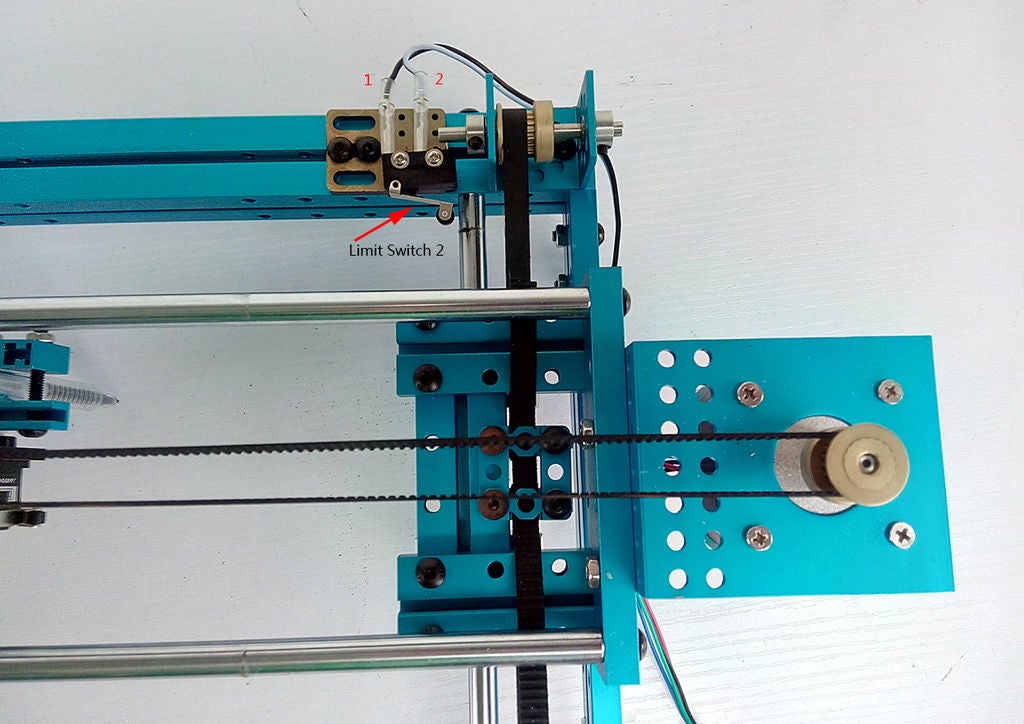
步骤4:安装第一个微型限位开关
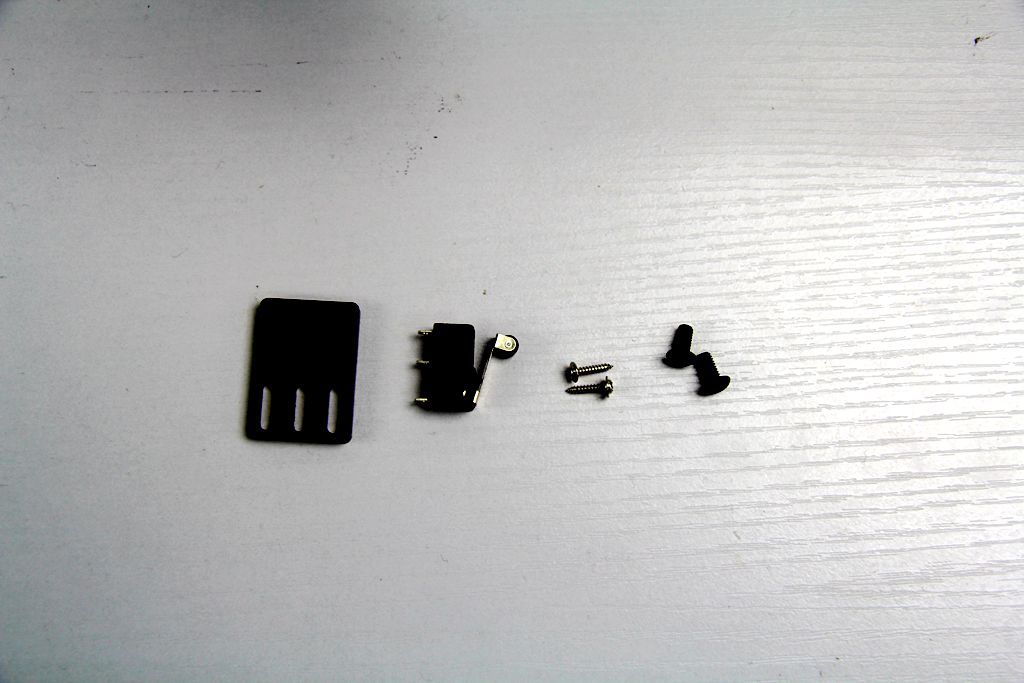
材料列表
1。微型开关按钮x1
2。 LS支架x1
3。十字槽盘头自攻螺钉ST2.2 x6.5 x2
4。螺丝M4x8 x2
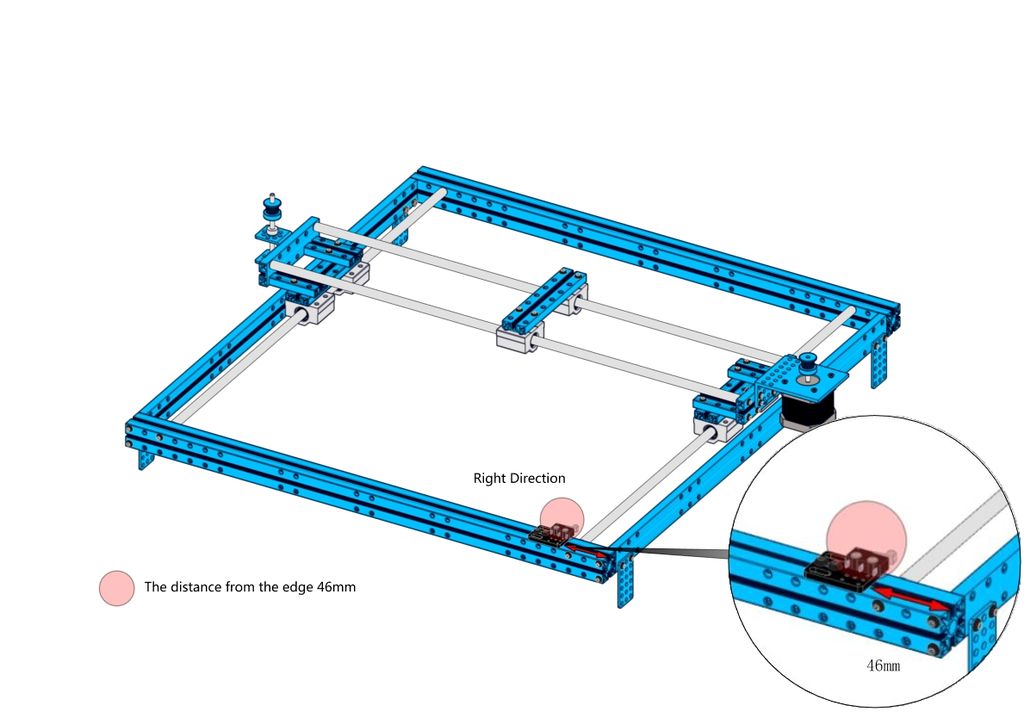
步骤
该步骤非常简单。但是,您仍然需要注意两点,
1。请按正确的方向安装微型开关。
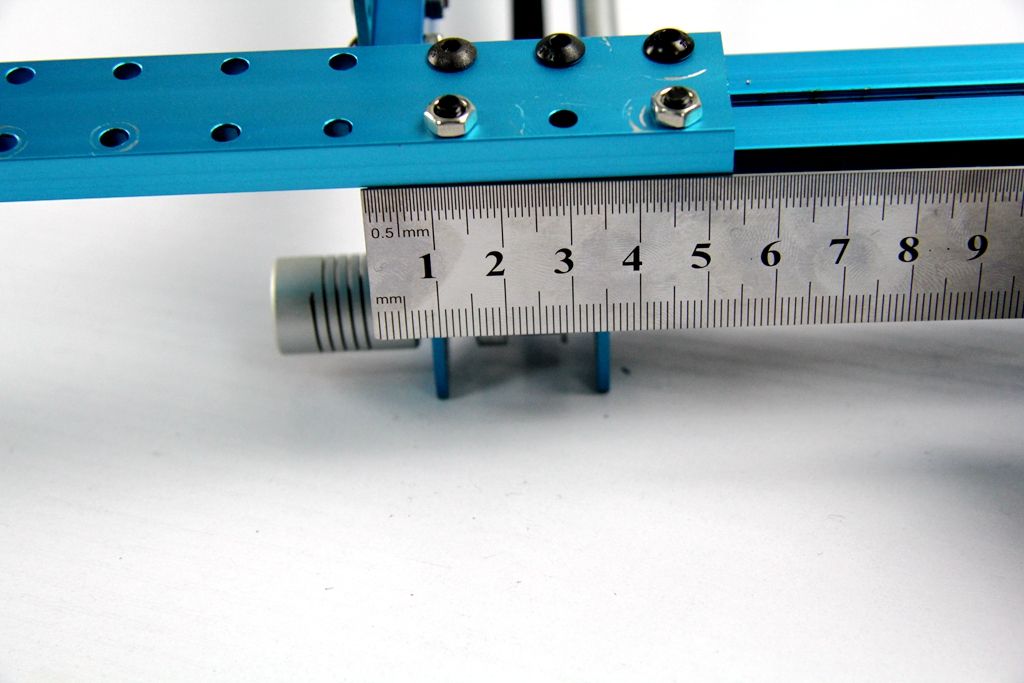
2。梁2424的边缘与LS支架之间的距离应约为46mm。确保滑动单元移至边缘时会触摸微型开关。
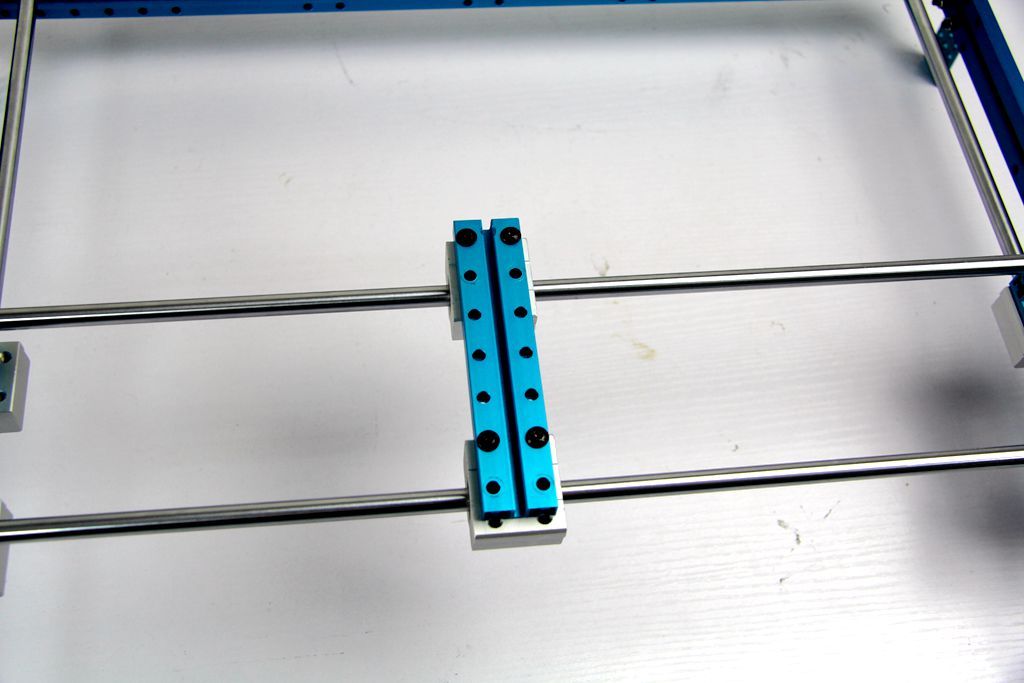
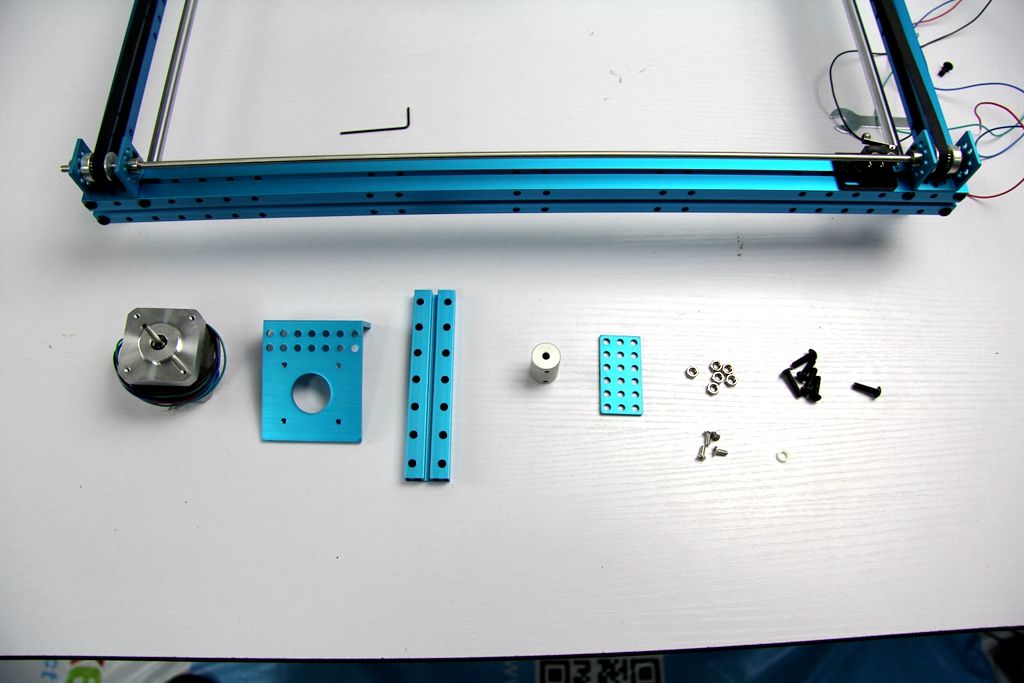
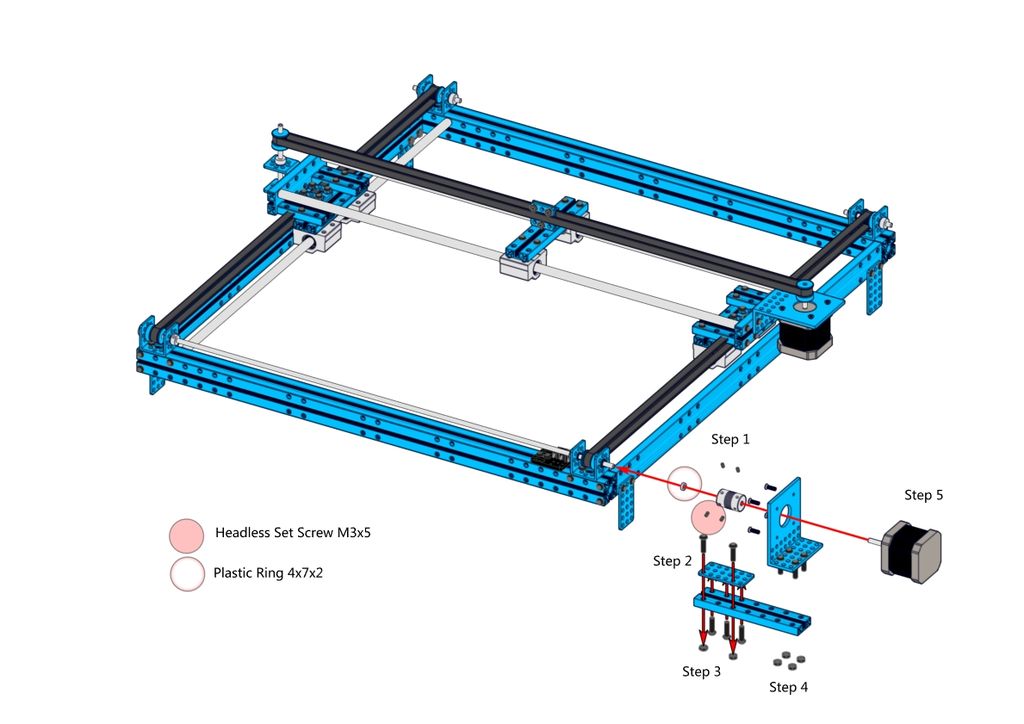
步骤5:安装变速箱
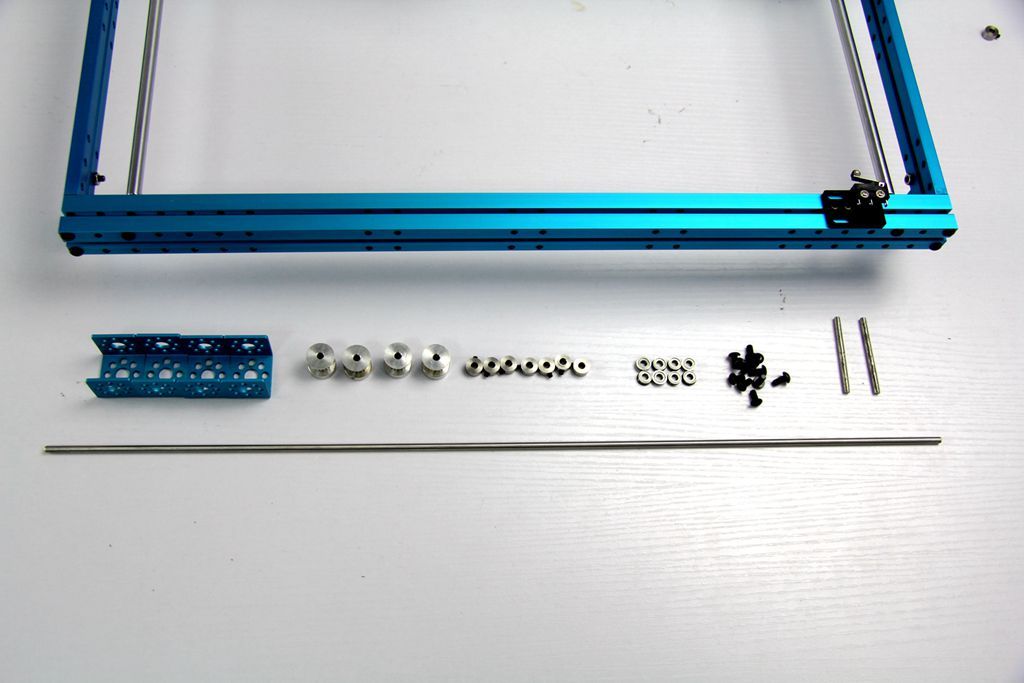
材料列表
1。直线运动轴D4x512mm x1
2。 D轴4x56mm x2
3。支架U1 x4
4。定时皮带轮18T x4
5。轴环4mm x7
6。法兰轴承4x8x3mm x8
7。无头固定螺钉M3x5 x11
8。螺钉M4x8 x8
步骤
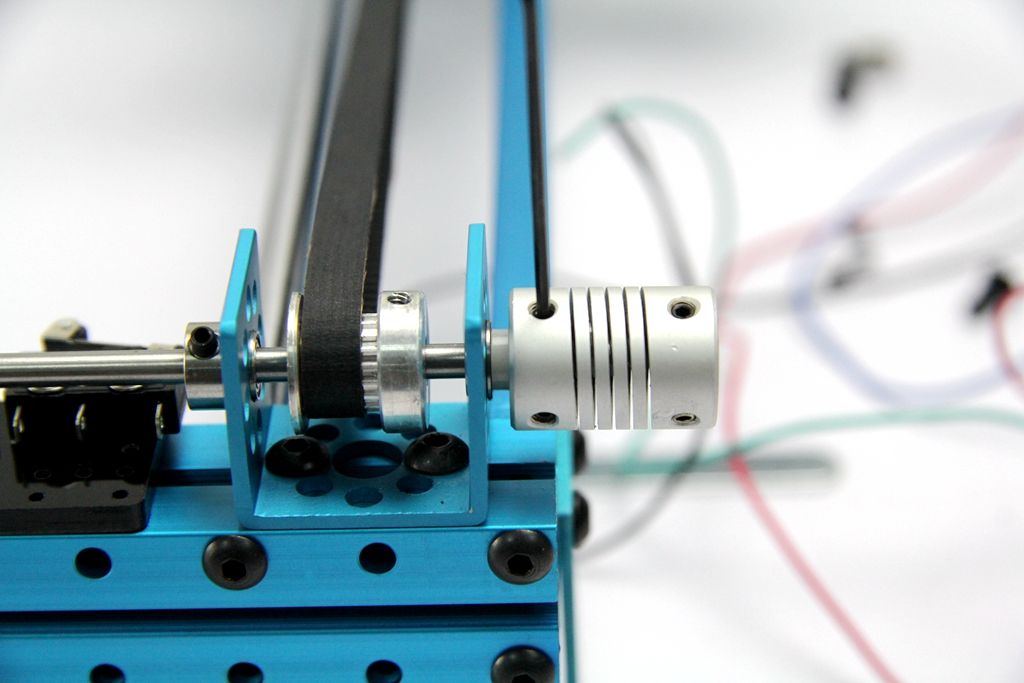
在这里我们需要更多的“祈祷轮”,请按照第二张图片完成步骤。提醒一下,您会发现D轴上有一个平面(这就是我们称之为“ D轴”的原因),您需要拧紧该平面上的无头紧定螺钉以固定正时皮带轮18T。/p》
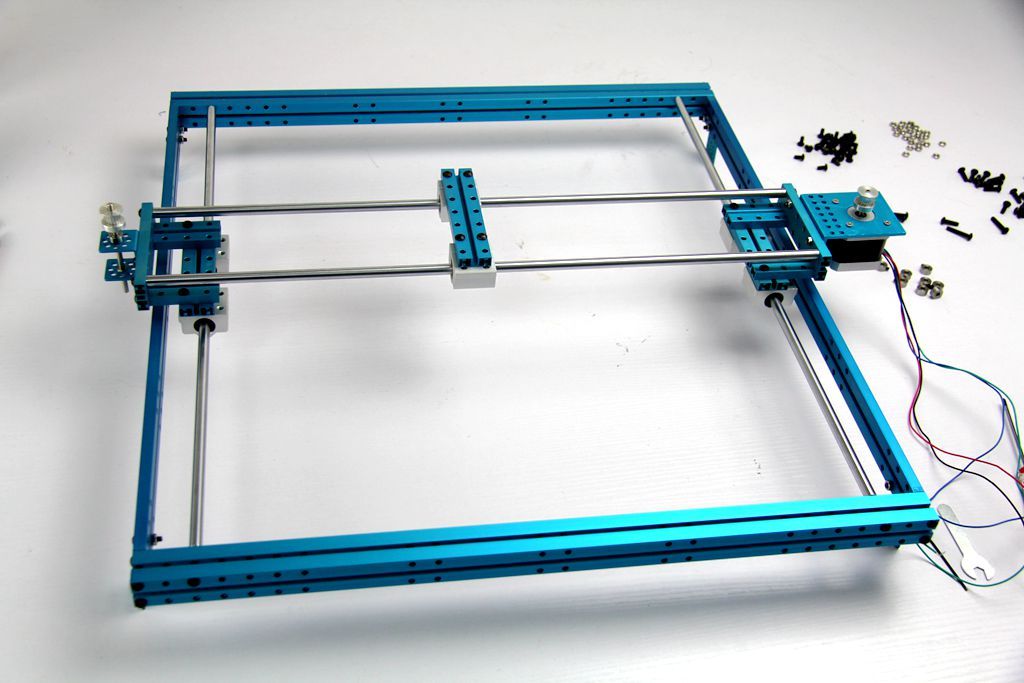
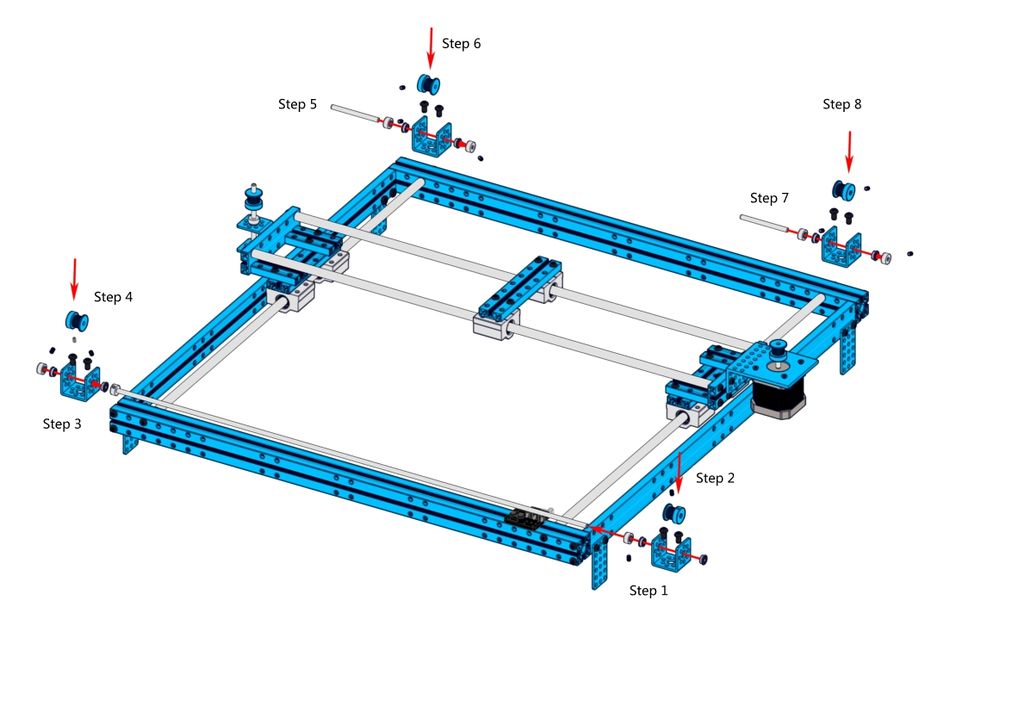
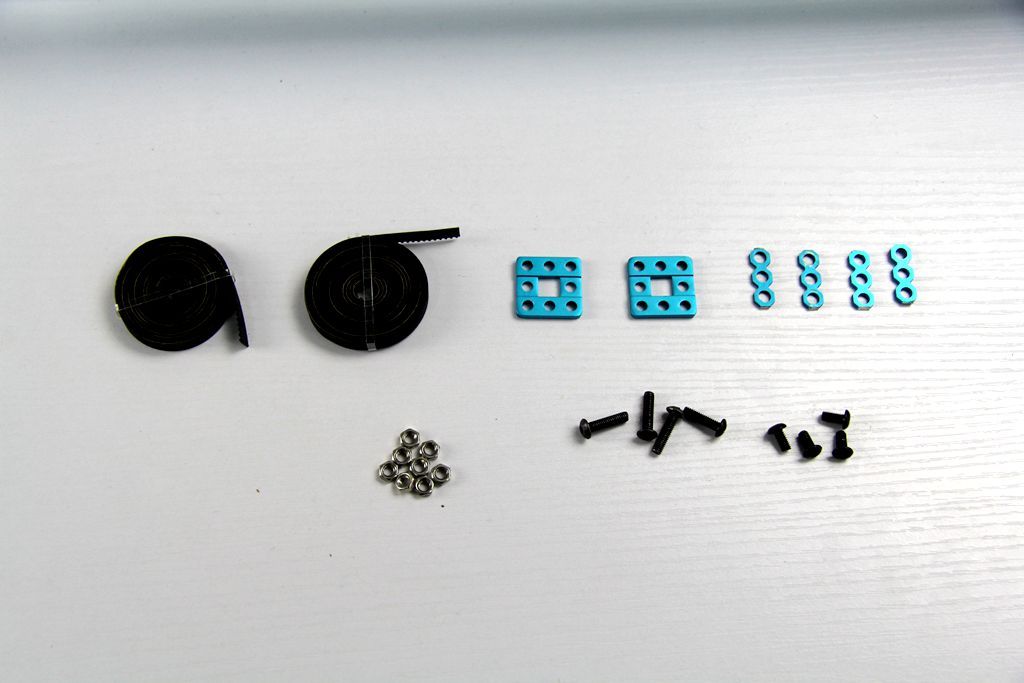
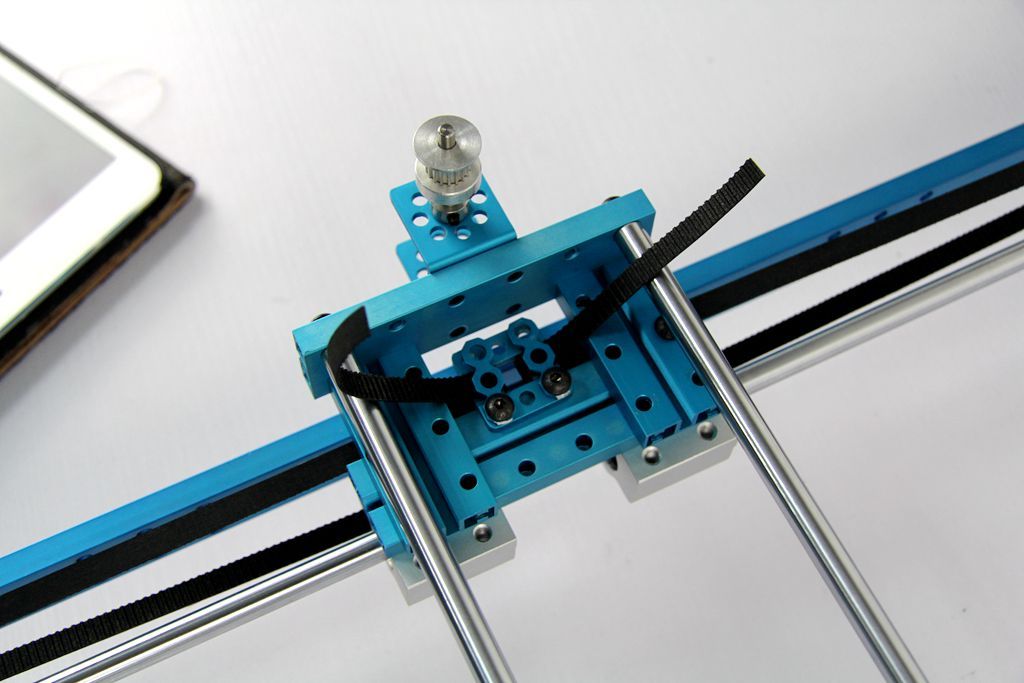
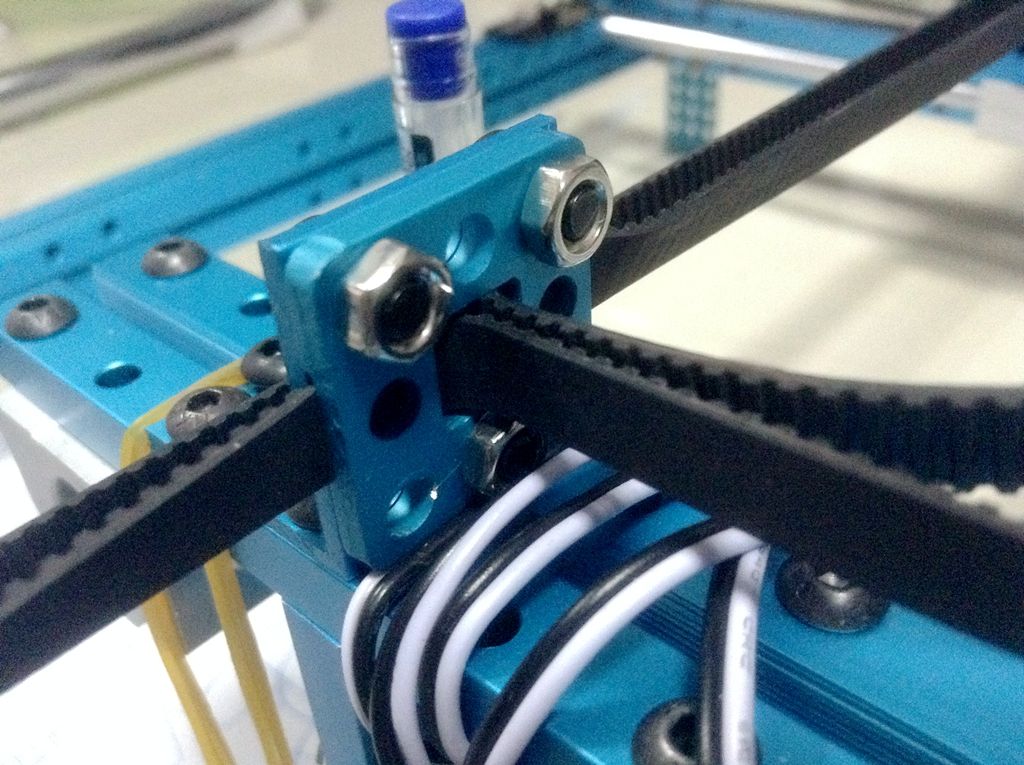
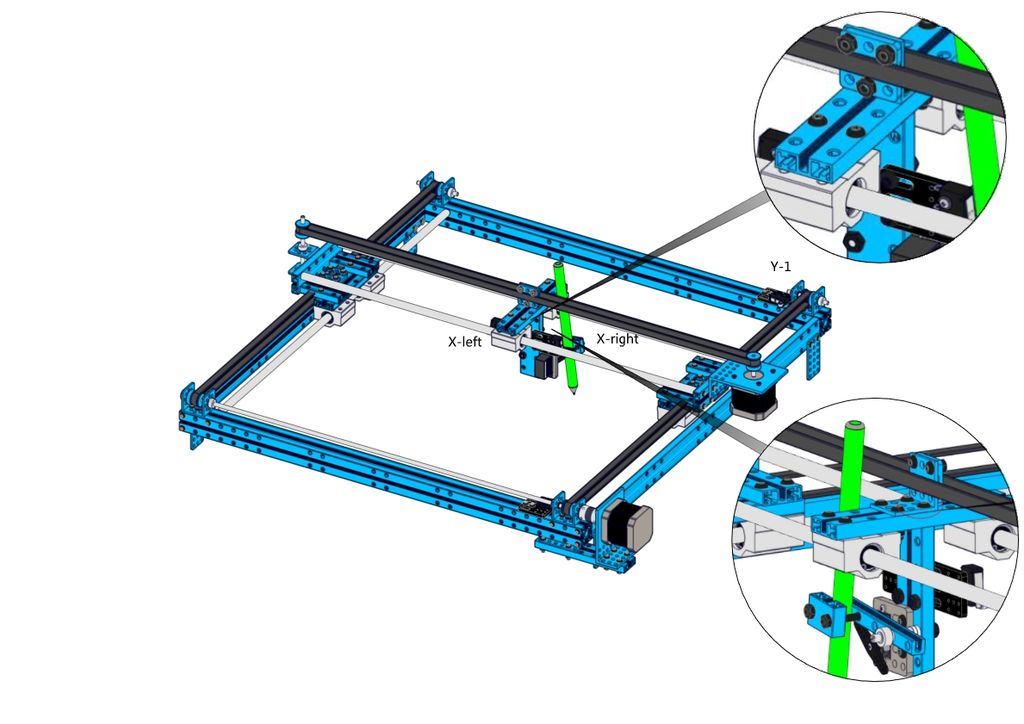
步骤6:安装正时皮带
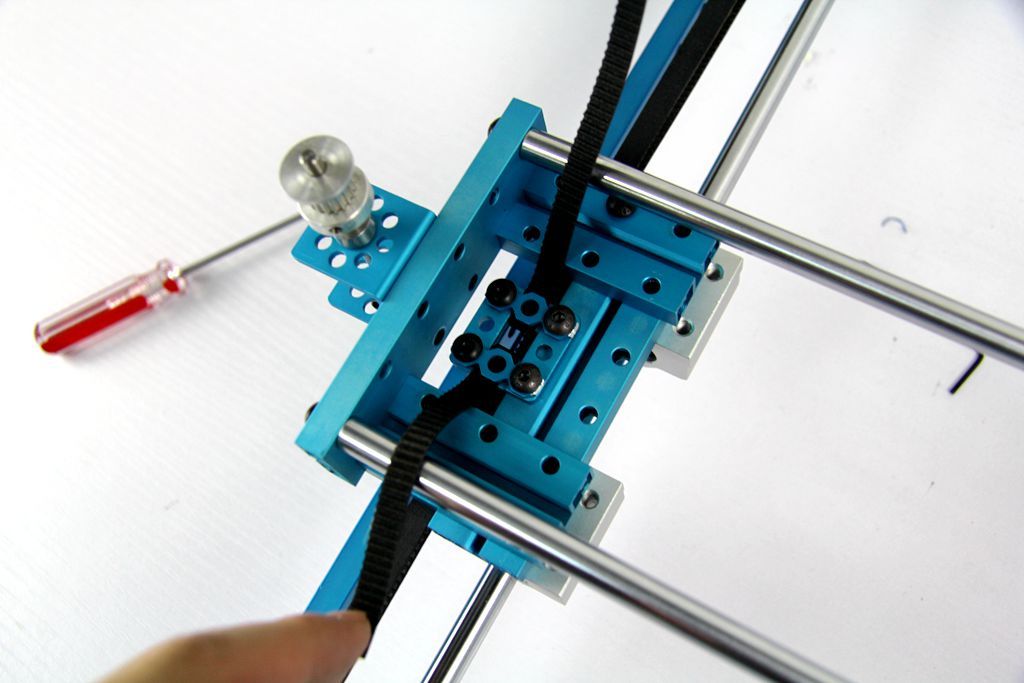
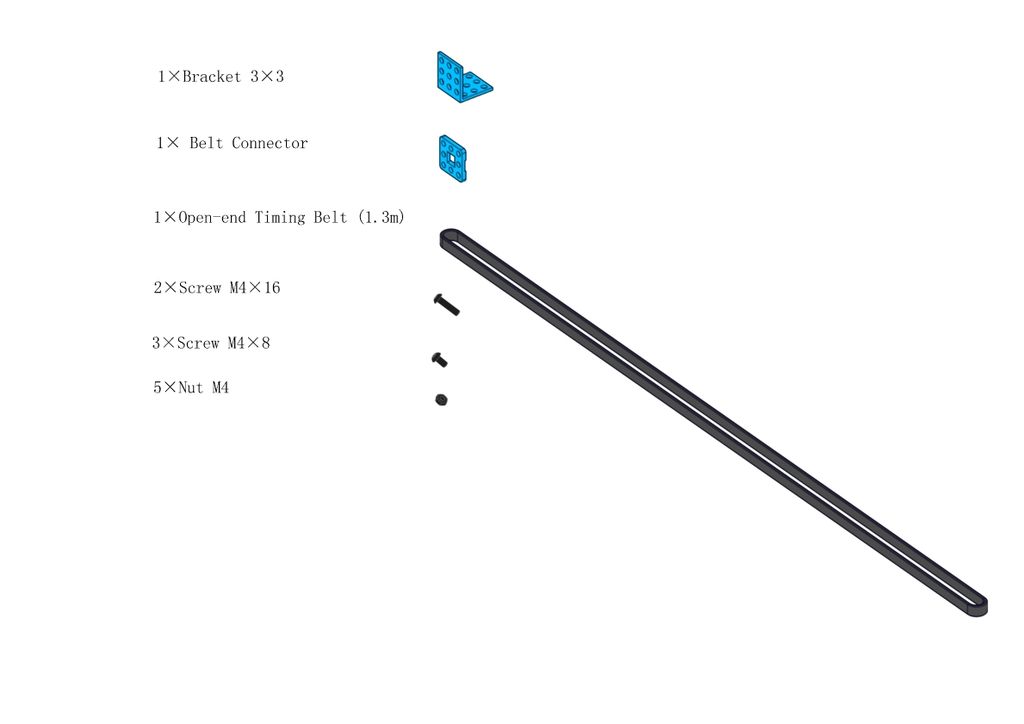
材料列表
1。开放式正时皮带(1.3m)x2
2。皮带接头x2
3。可剪切链接3 x4
4。螺钉M4x16 x4
5。螺钉M4x8 x4
6。螺母M4x8
过程
在此步骤中,我们使用“皮带连接器”固定正时皮带。您会发现连接器的每一侧都有间隙。同步带应穿过该间隙。
提示,在连接同步带时,请先拧紧一根螺钉,然后将其插入。然后可以拧紧另一根螺钉。最后,拉紧皮带以保持紧绷。
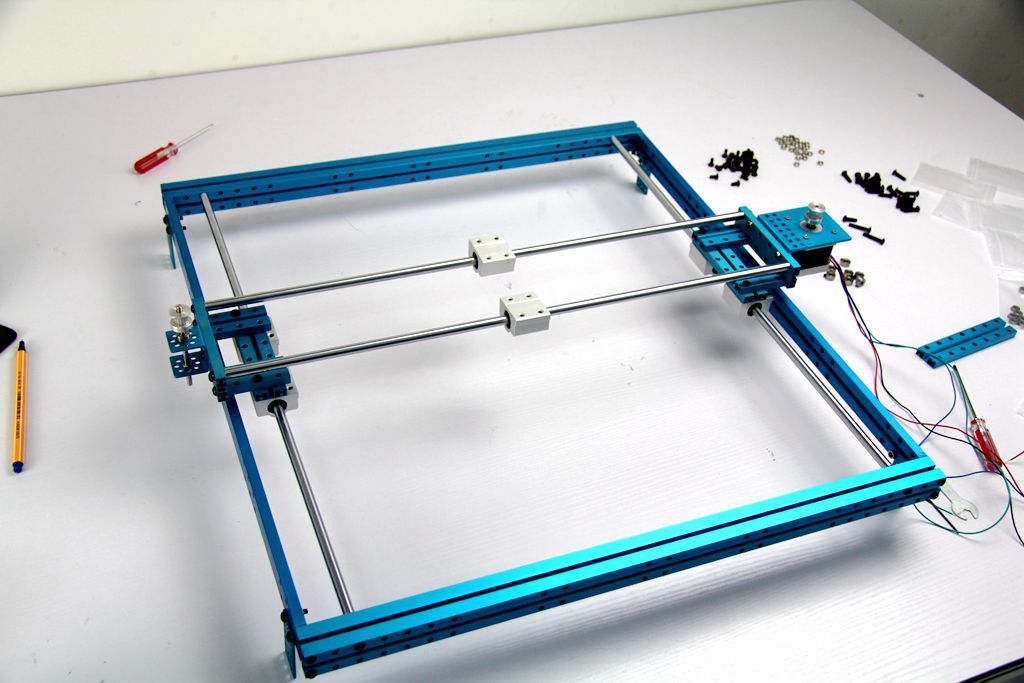
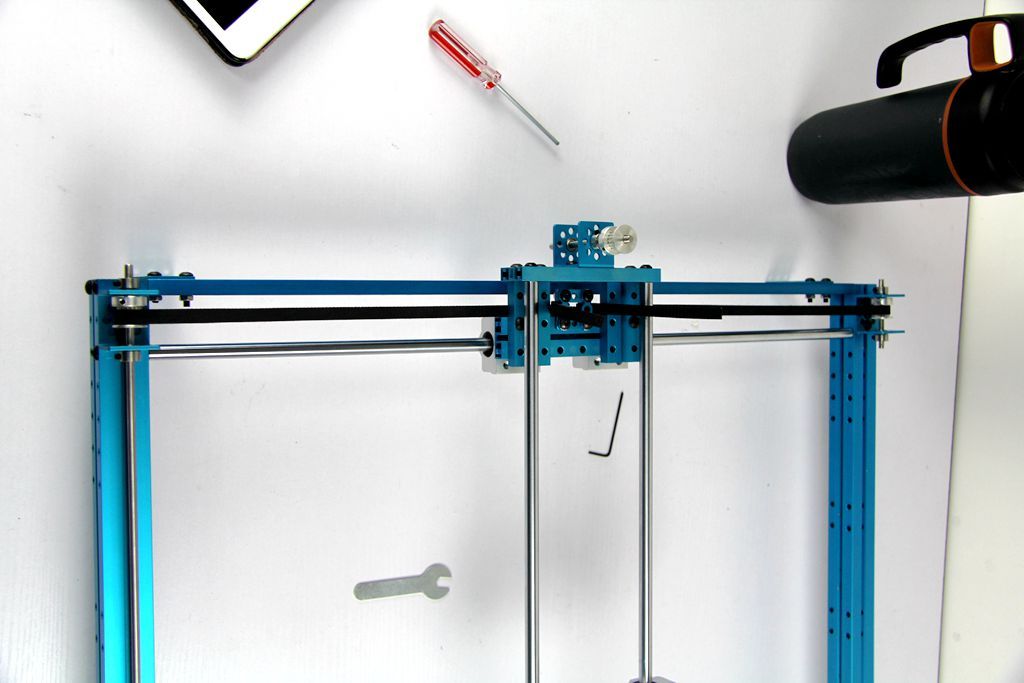
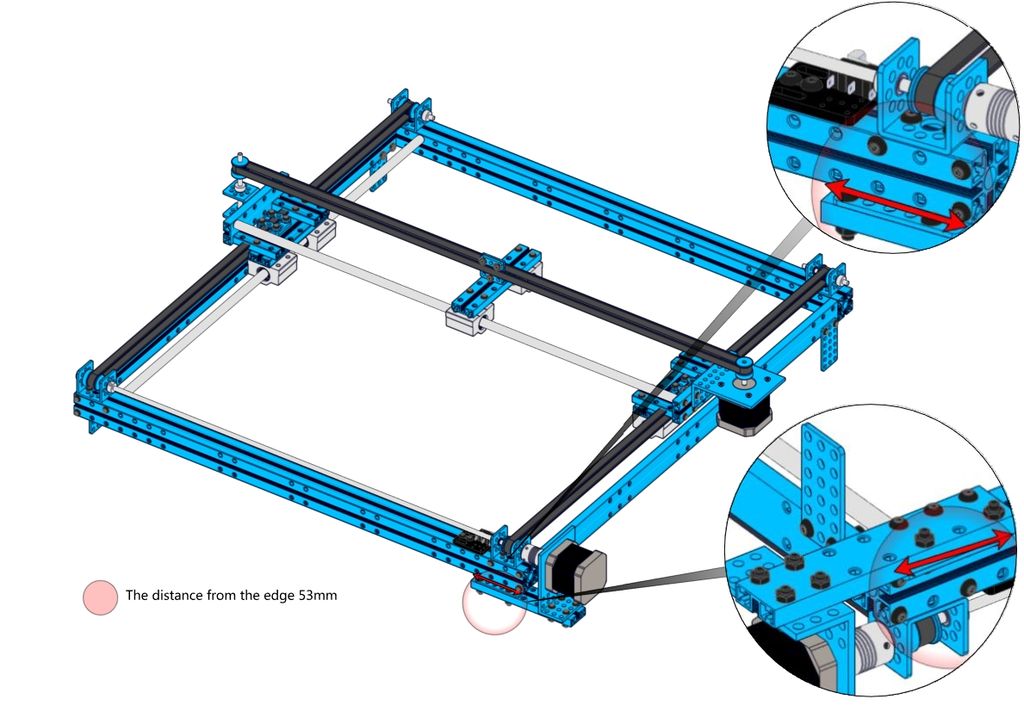
步骤7:为Y轴安装步进电机
材料列表
1。 42BYG步进电机x1
2。 42BYG步进电机支架x1
3。光束0824 128 x1
4。挠性联轴器4x4mm x1
5。板3x6 x1
6。螺钉M4x16 x9
7。螺母M4 x6 8。螺丝沉头M3x8 x4
9。无头固定螺钉M3x5 x4
10。塑料环4x7x2 x1
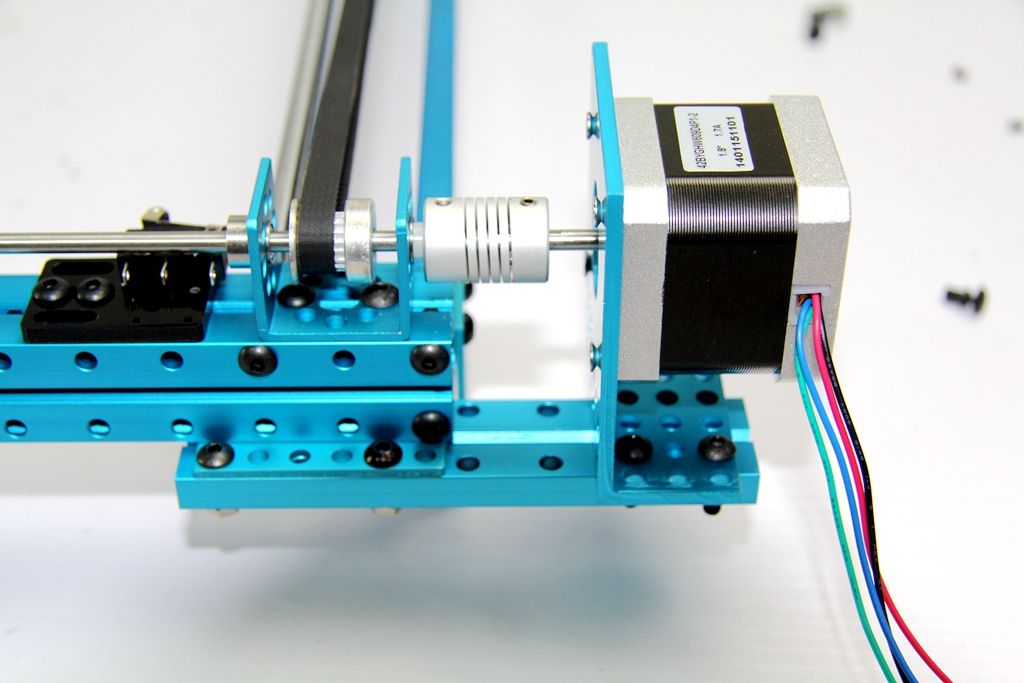
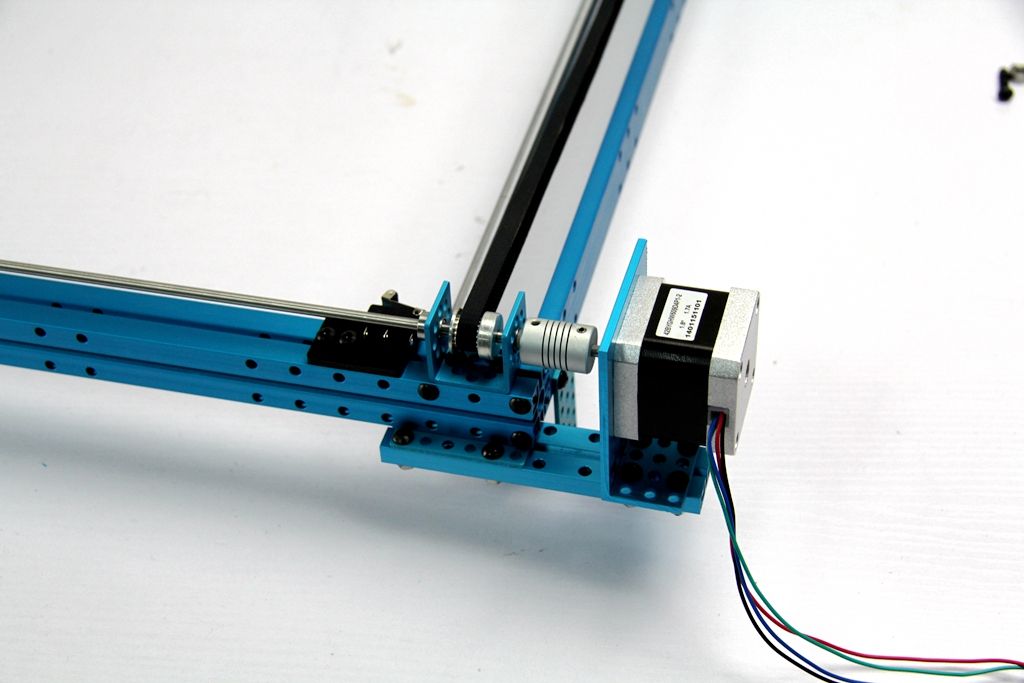
程序
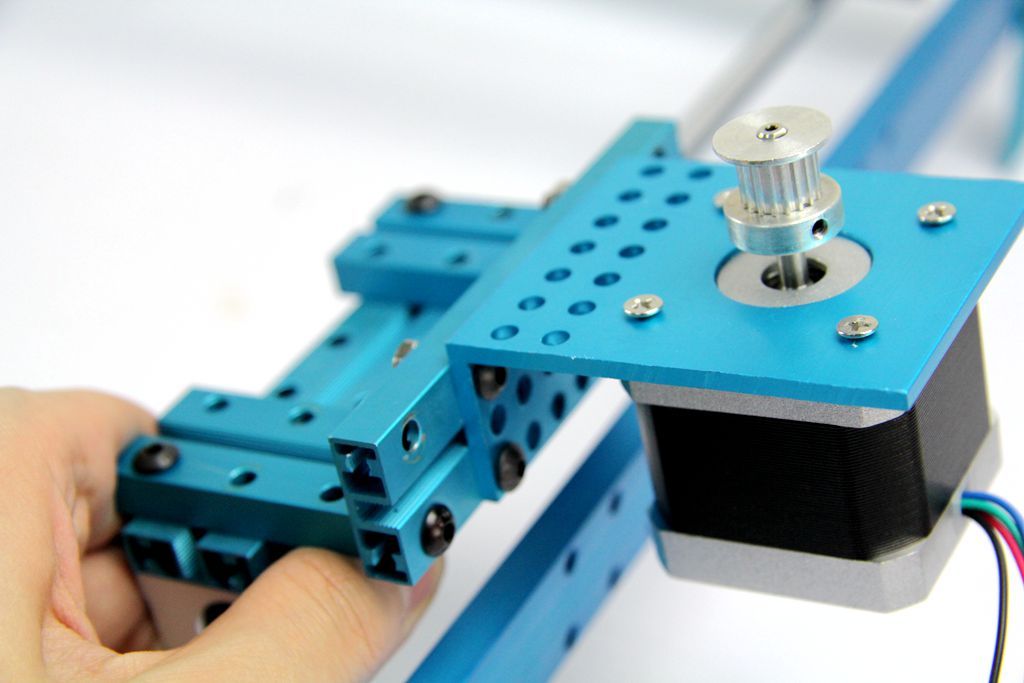
1。将挠性联轴器安装到轴M4上。请注意,U形支架和挠性联轴器之间有一个塑料环。
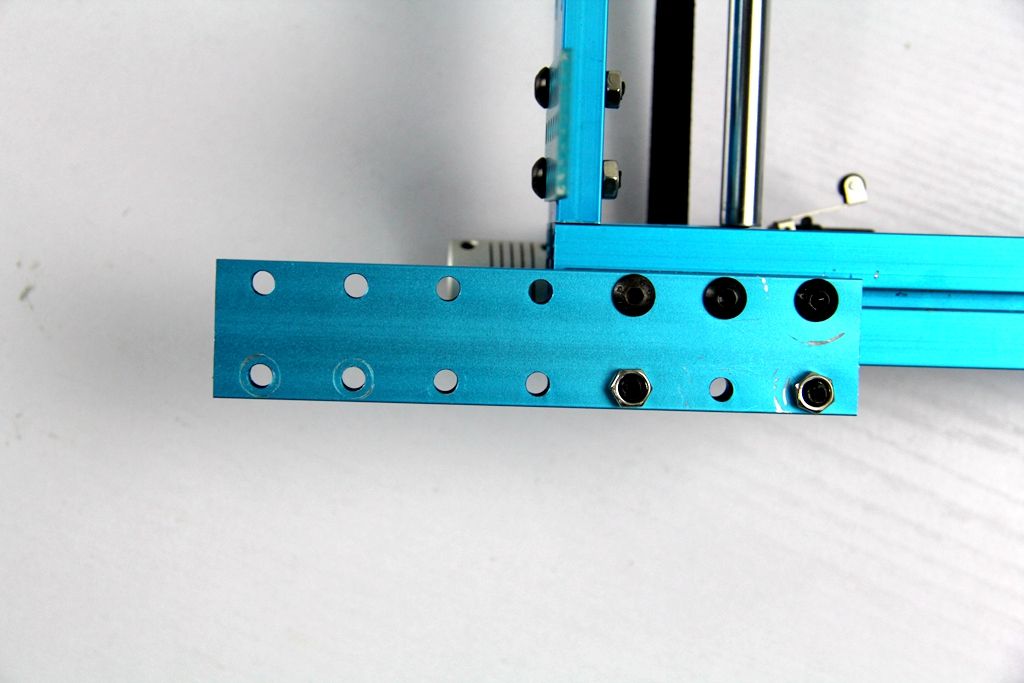
2。将步进器支架安装到beam2424上。长度约为53mm。
3。将步进器固定在支架上,然后将整个结构安装在支架上。
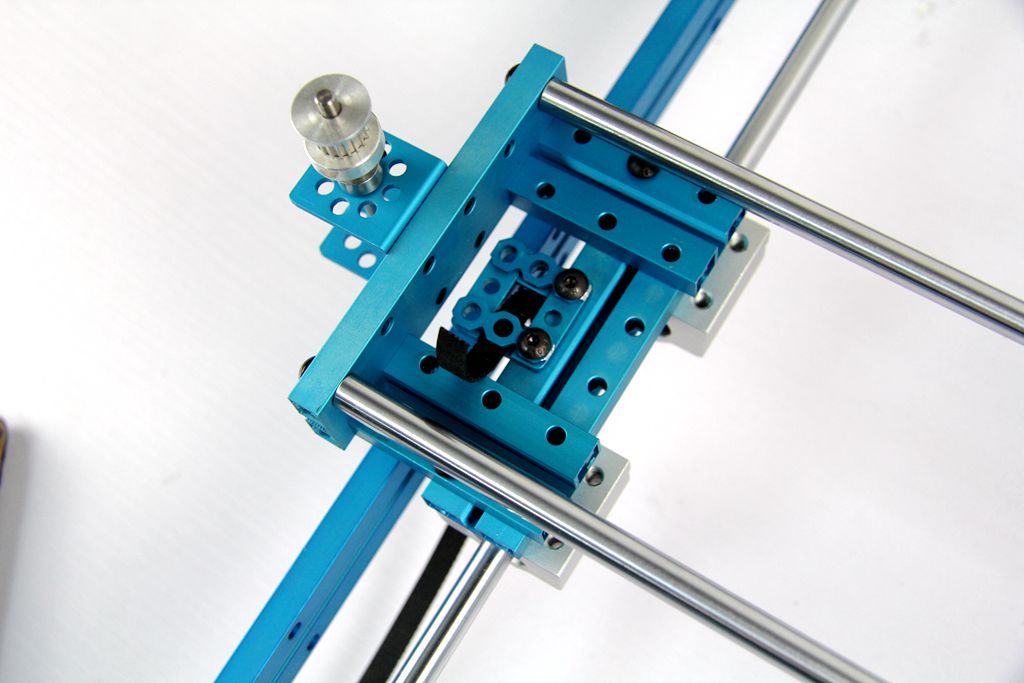
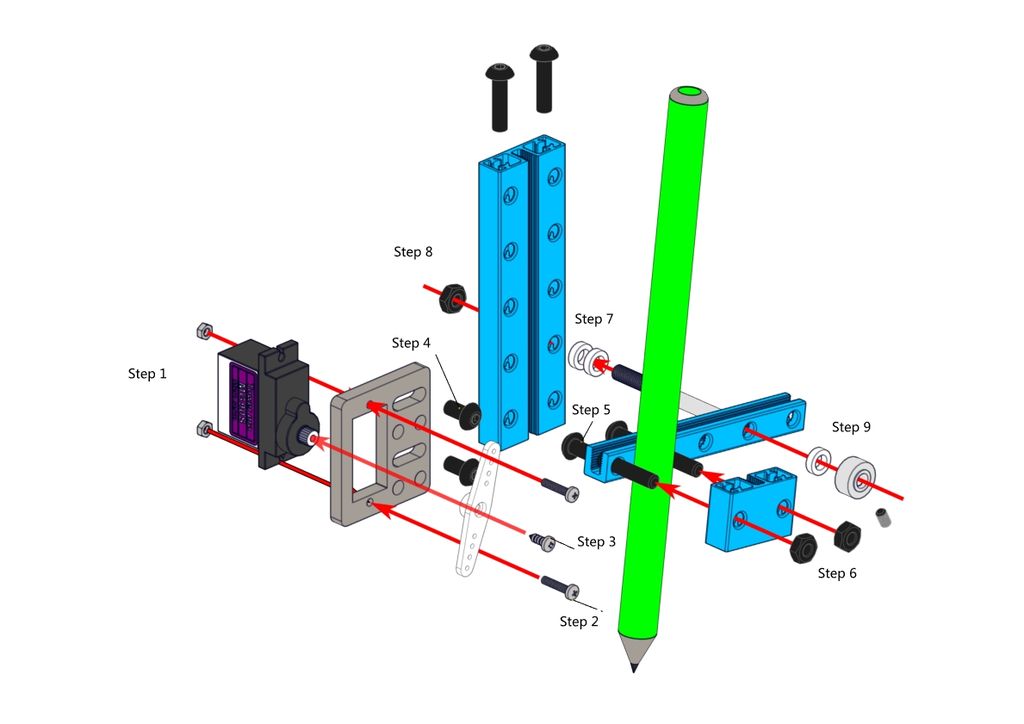
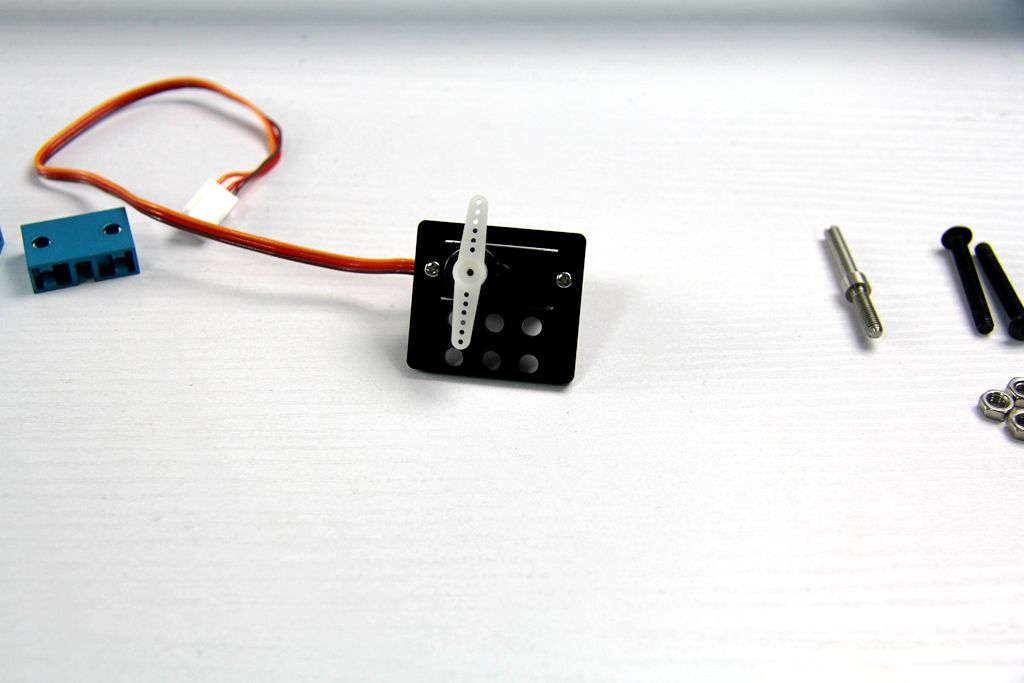
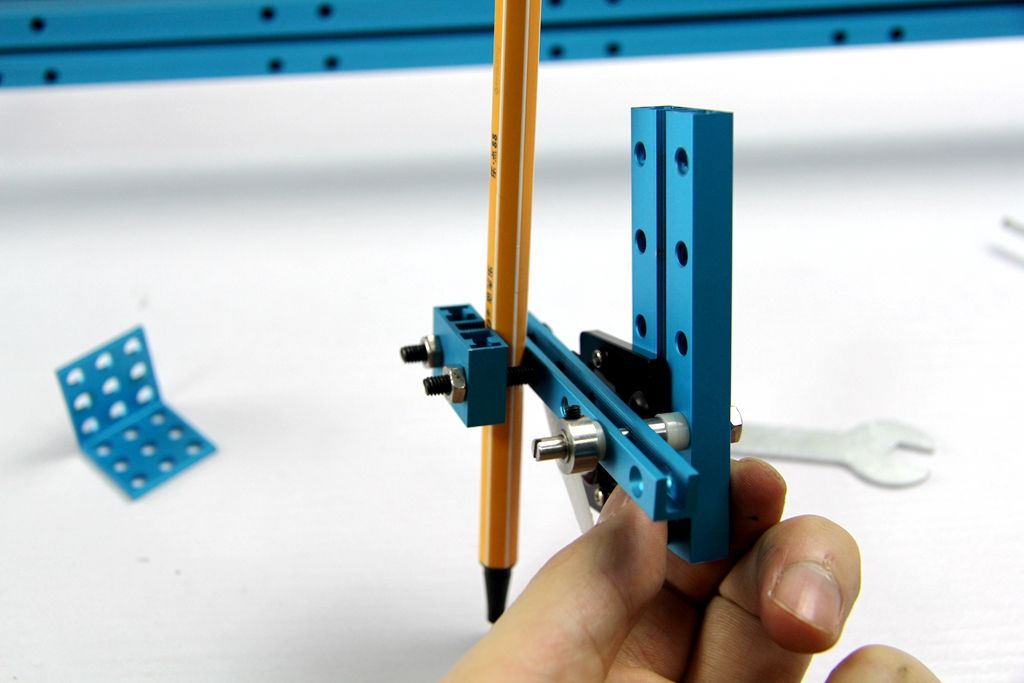
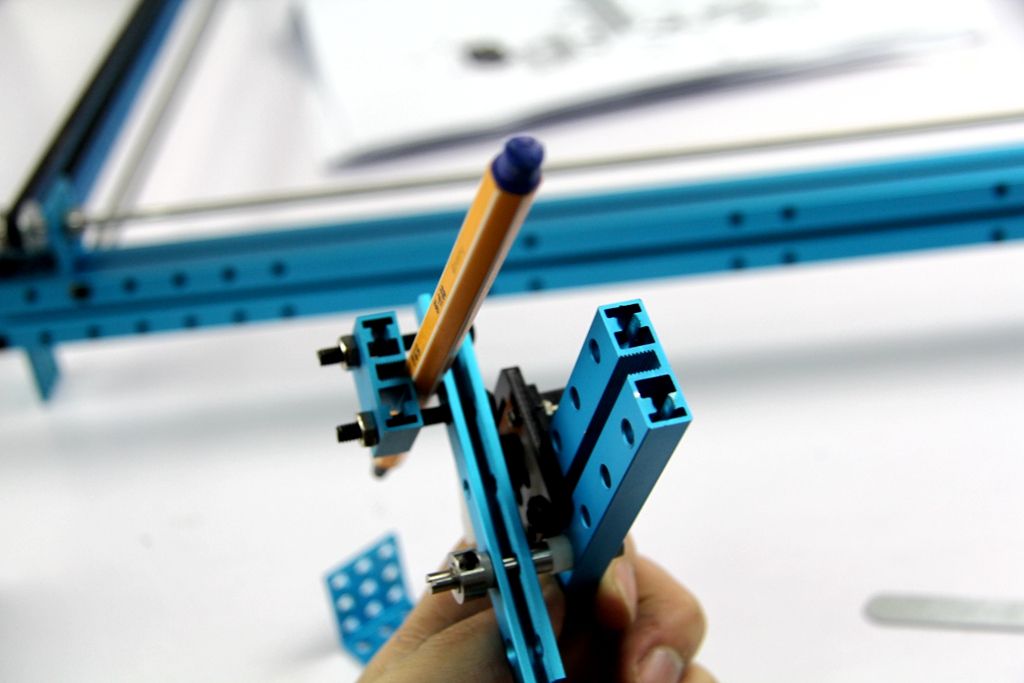
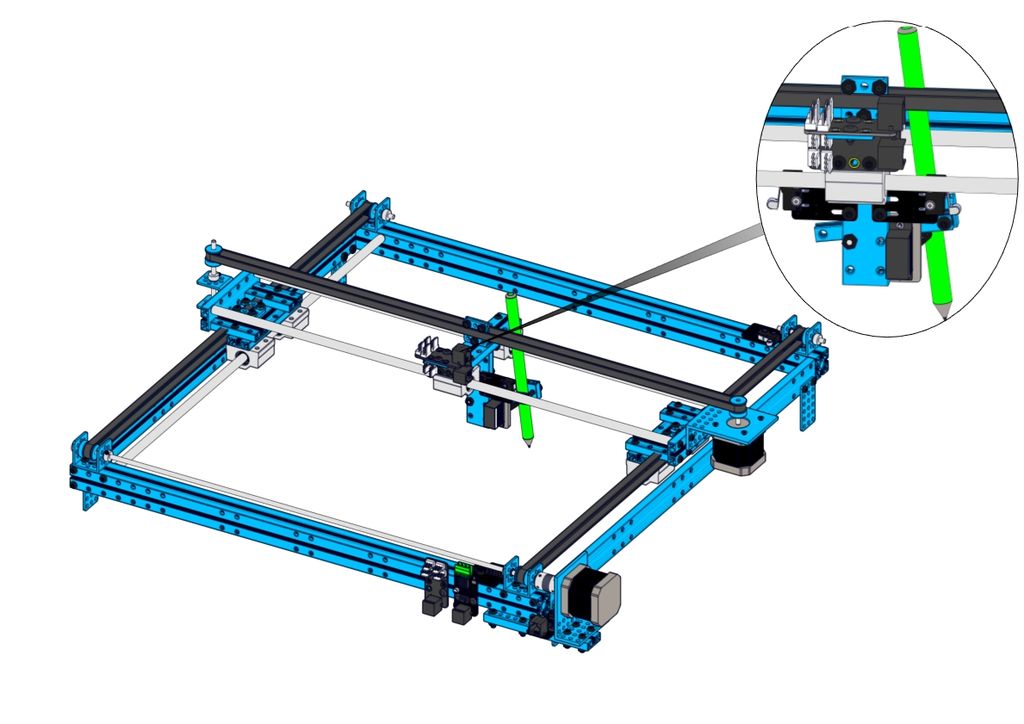
步骤8:组装起笔结构
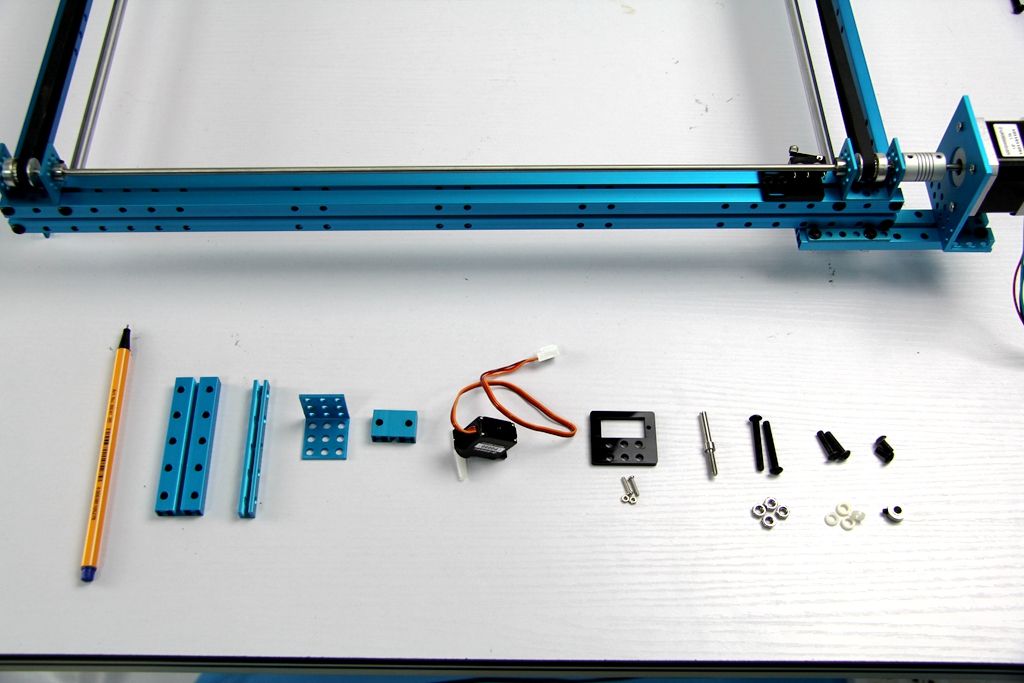
材料列表
1 。 Pencil.etc(自己提供)x1
2。光束0824 80 x1
3。光束0824 16 x1
4。光束0808 72/80 x1
5。微型伺服固定切片x1
6。 9克Micro Servo x1
7。螺纹轴4x39mm x1
8。螺钉M4 x30 x2
9。螺钉M4 x16 x2
10。螺钉M4x8 x2
11。螺钉M2x10 x2
12。螺母M4 x3
13。螺母M2 x2
14。无头螺钉M3x5 x1
15。轴环x1
16。塑料环4x7x2 x3
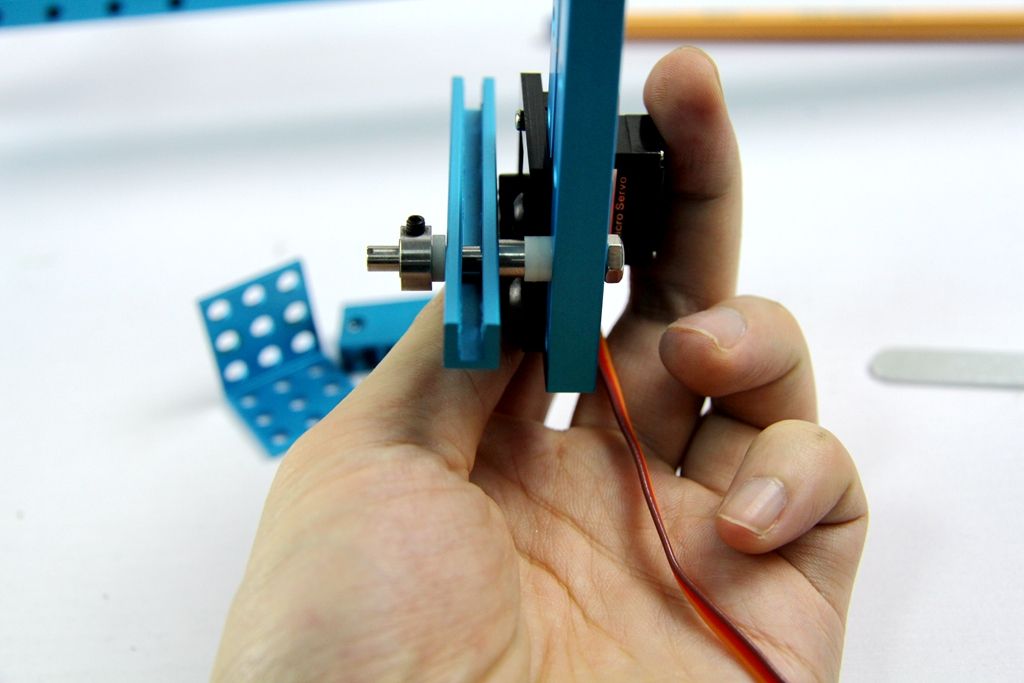
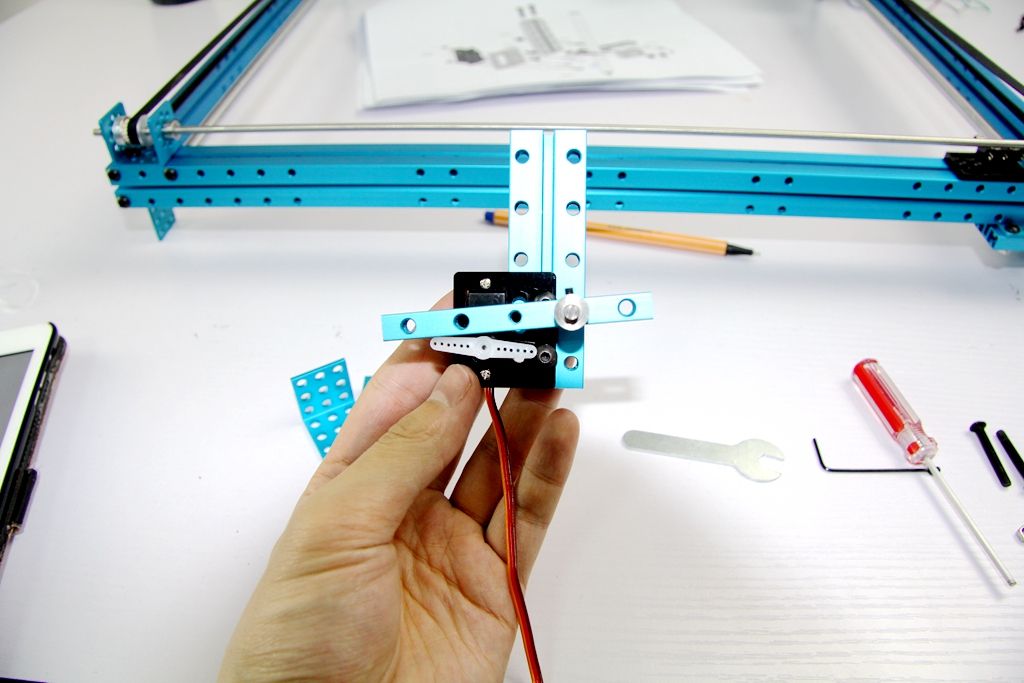
程序
1。用螺丝和螺母M2将9g Micro Servo固定在丙烯酸伺服切片上。
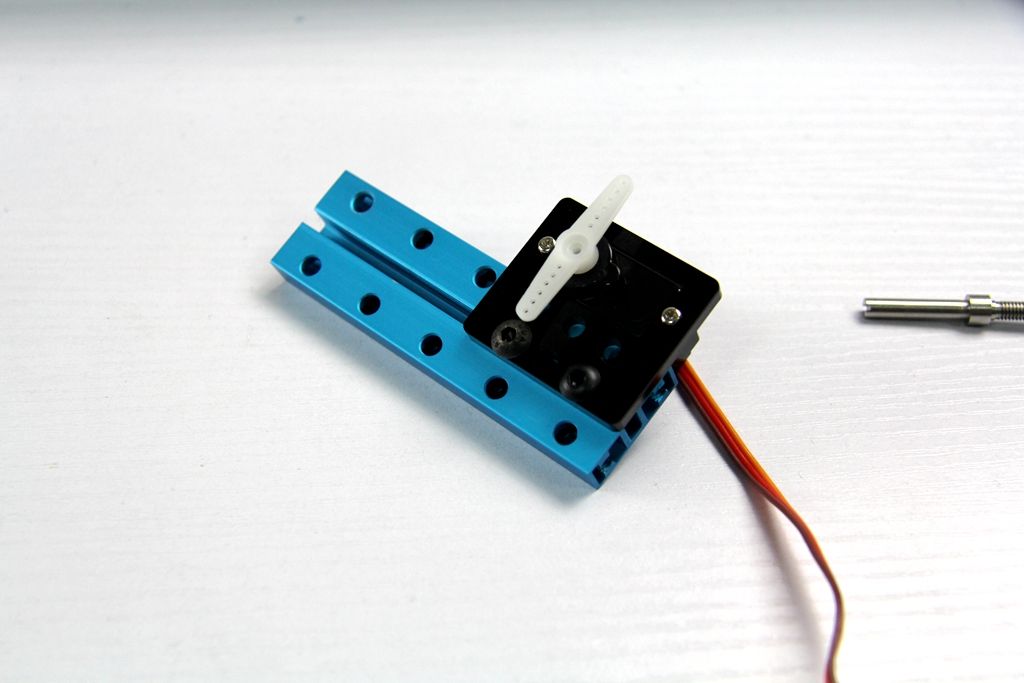
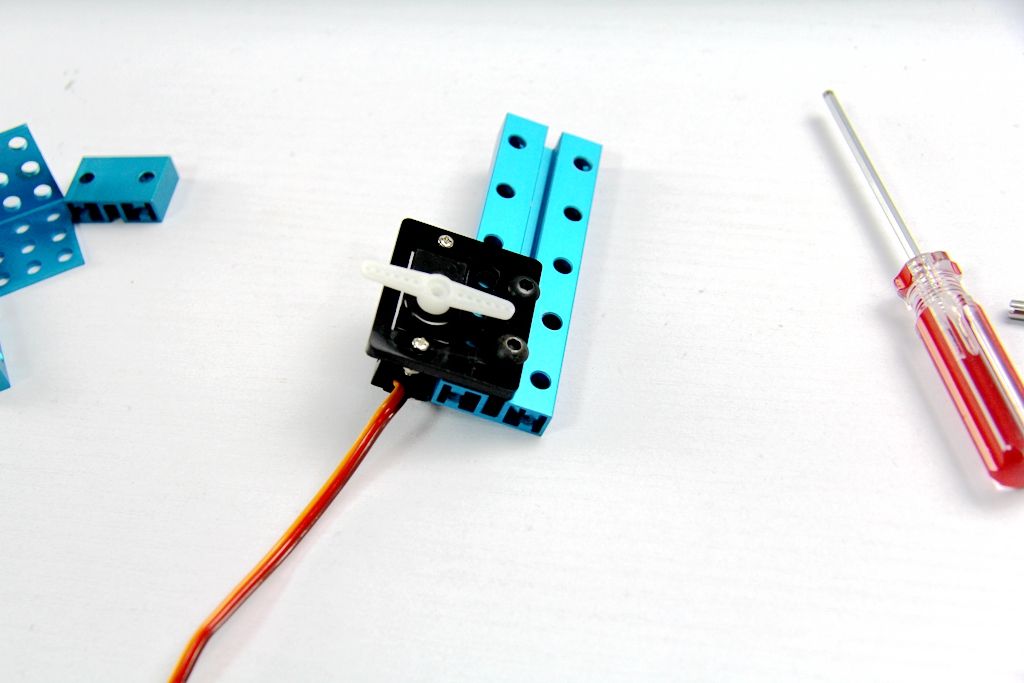
2。将伺服结构安装在横梁0824 80上。
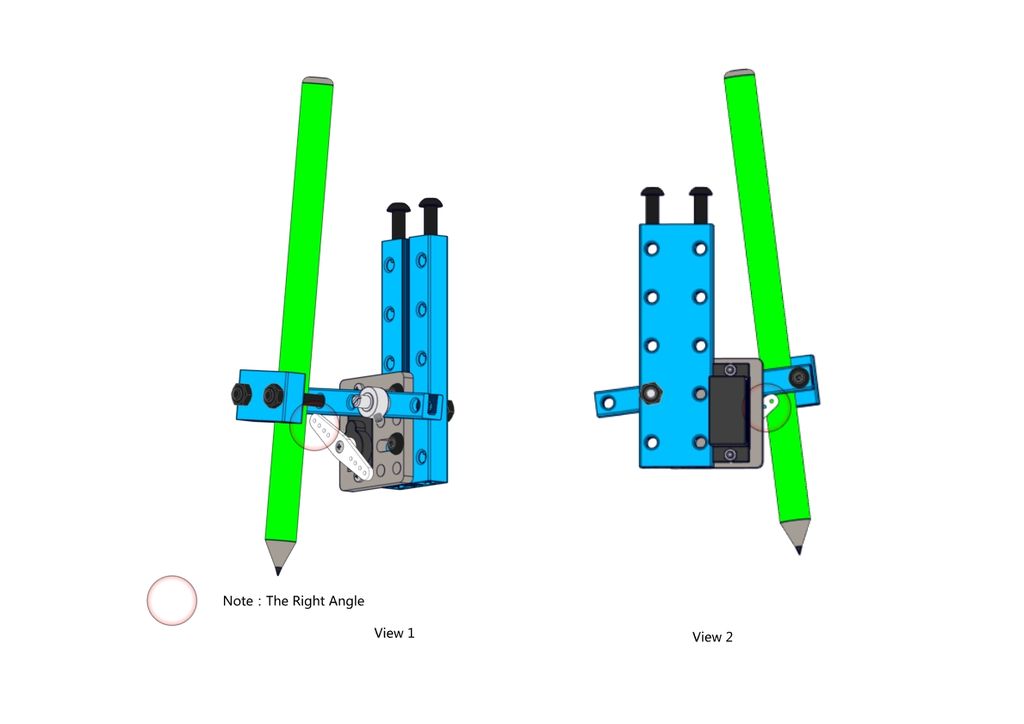
3。用螺纹轴安装横梁0808。请按照图片说明进行操作。您会发现伺服器如何抬起笔。
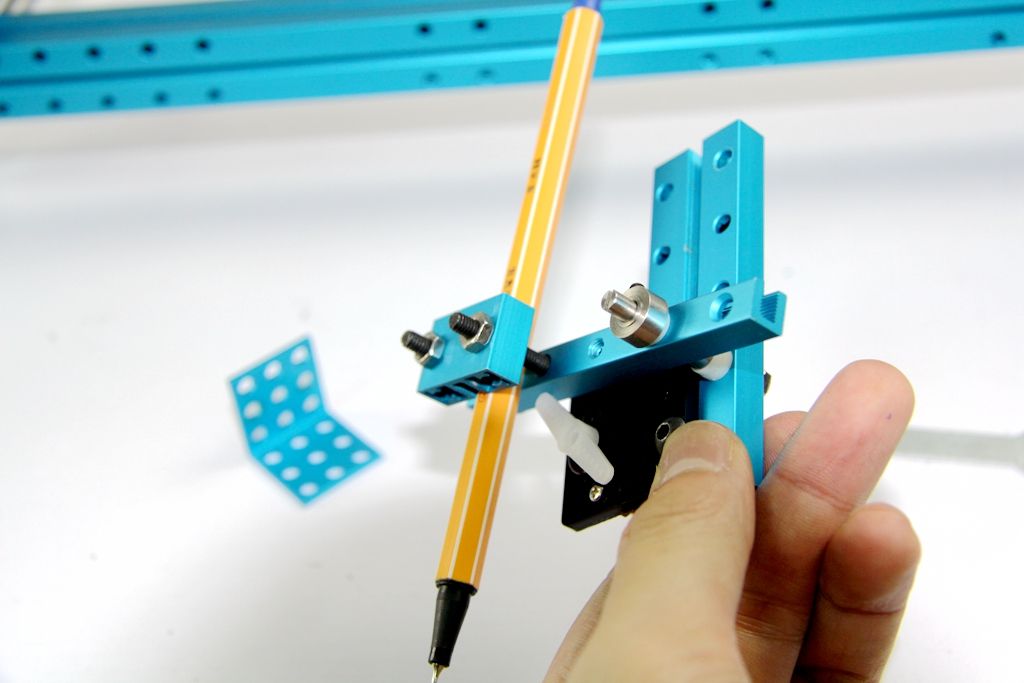
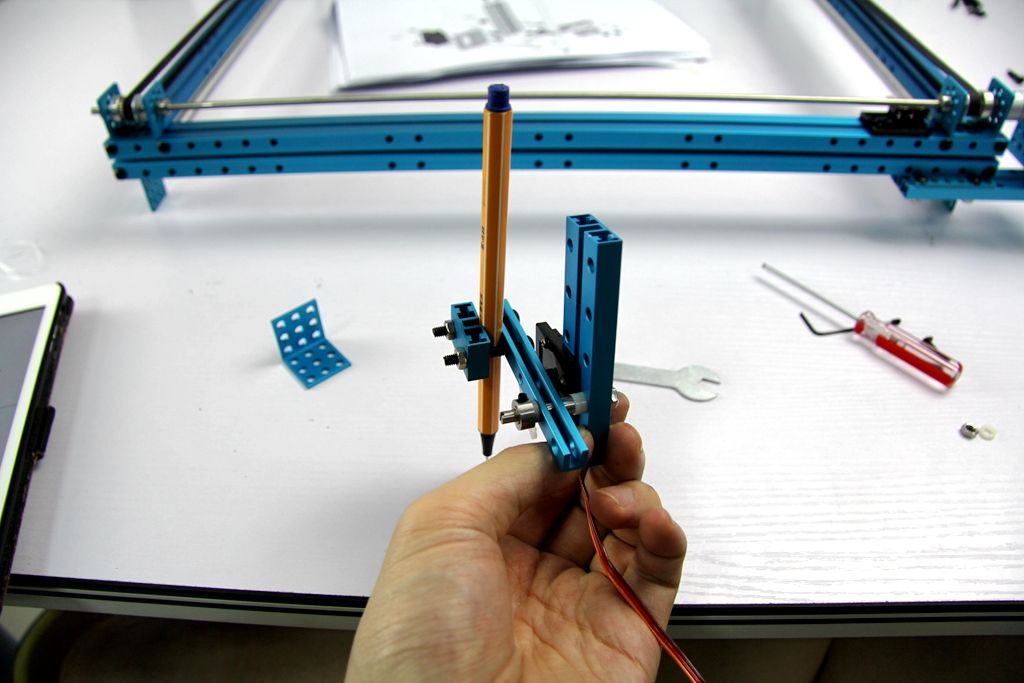
4。找到螺丝M4 x30。用光束0824和螺丝夹住笔。
5。将整个结构安装在X轴上。
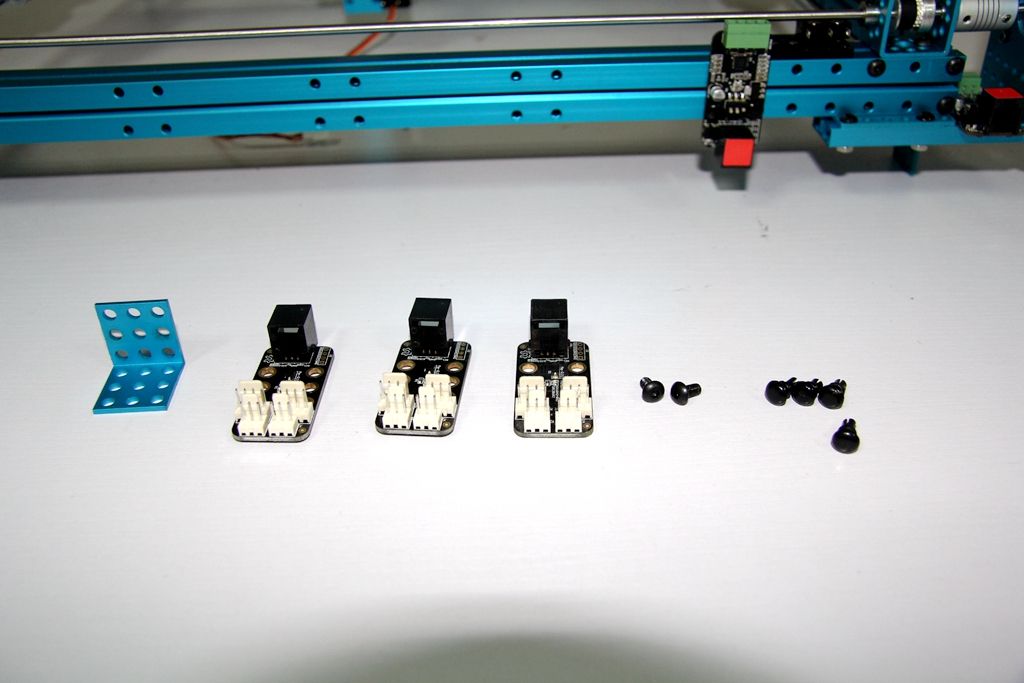
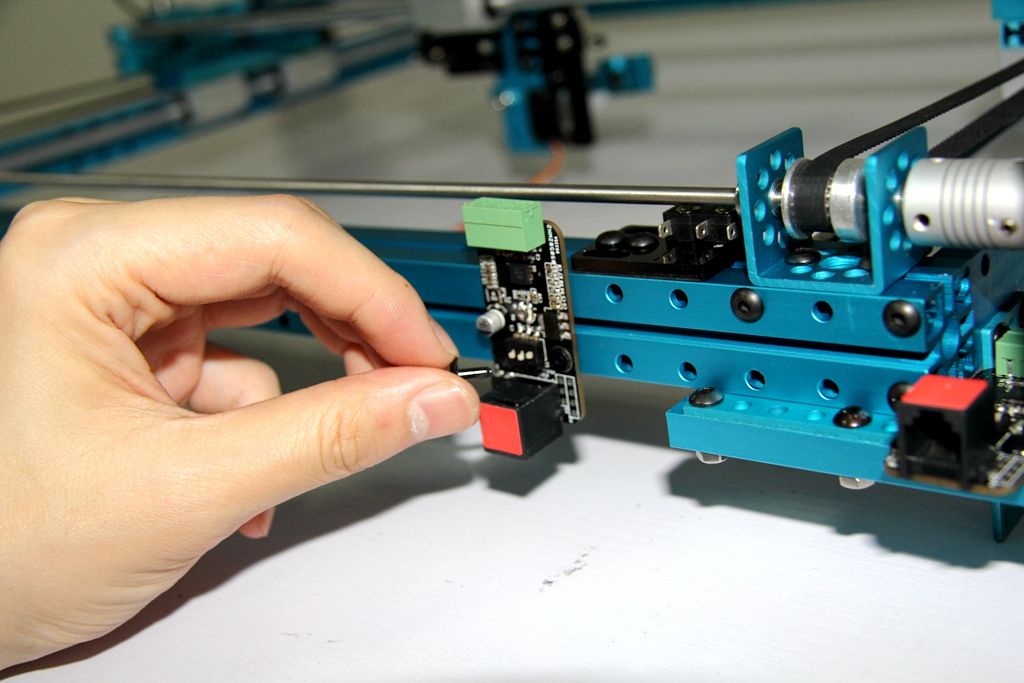
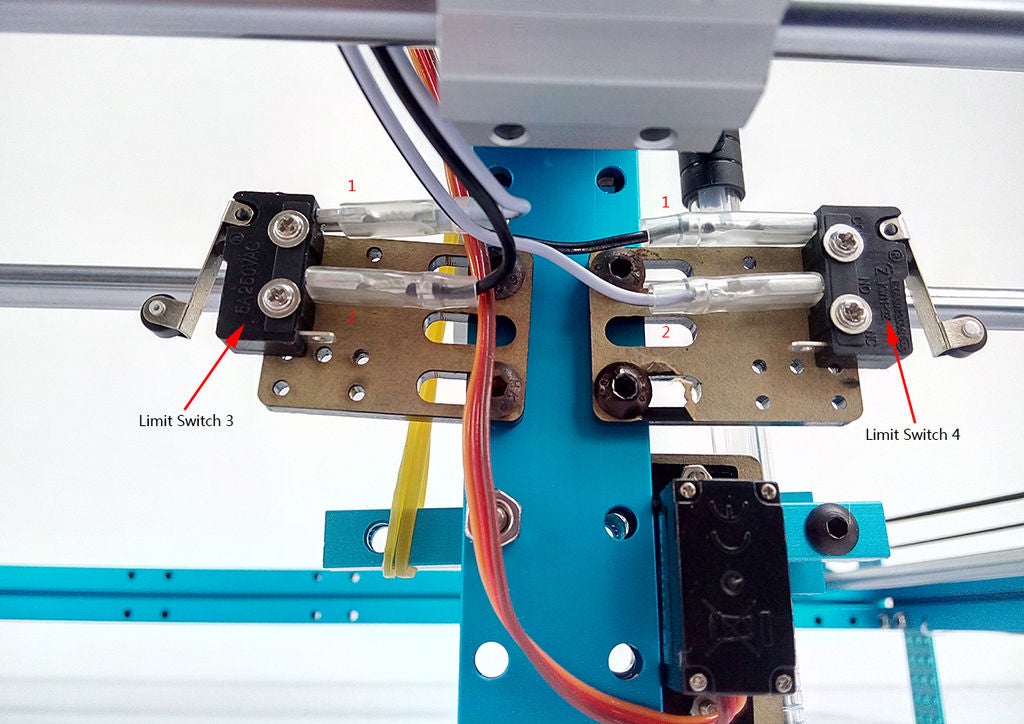
步骤9:安装其他微型开关
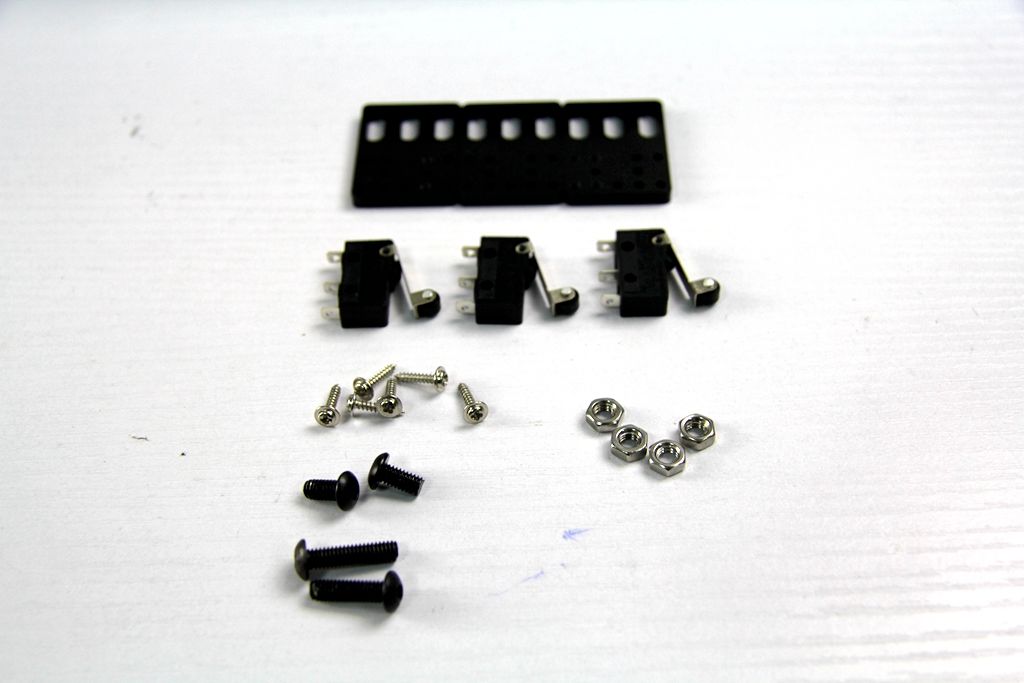
材料列表,
1。微型开关按钮x3
2。 LS支架x3
3。十字槽盘头自攻螺钉ST2.2x6.5 x6
4。螺钉M4x8 x2
5。螺钉M4x16 x4
4。螺母M4 x4
步骤
1。将微型开关固定在LS支架上。
2。这些微型开关中的2个应安装在笔形结构上。另一个应固定在beam2424上
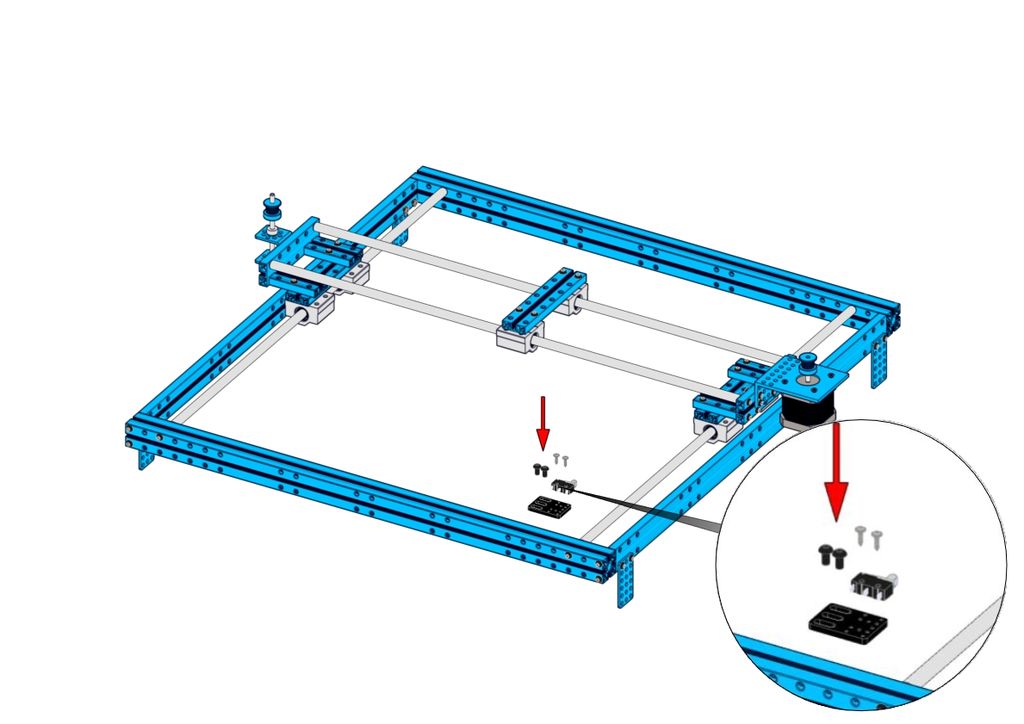
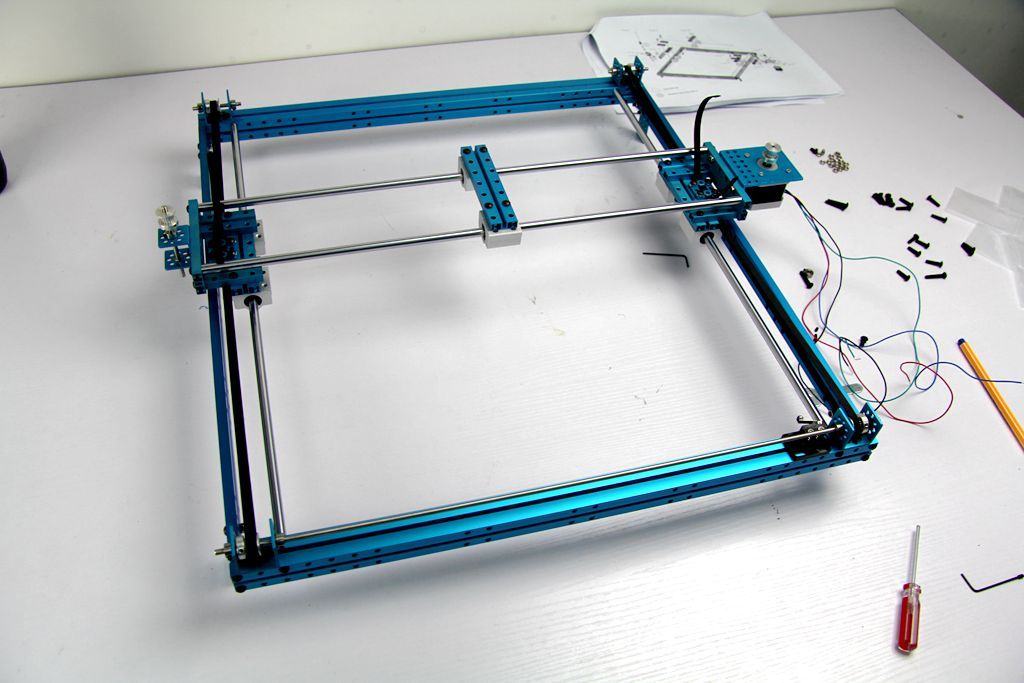
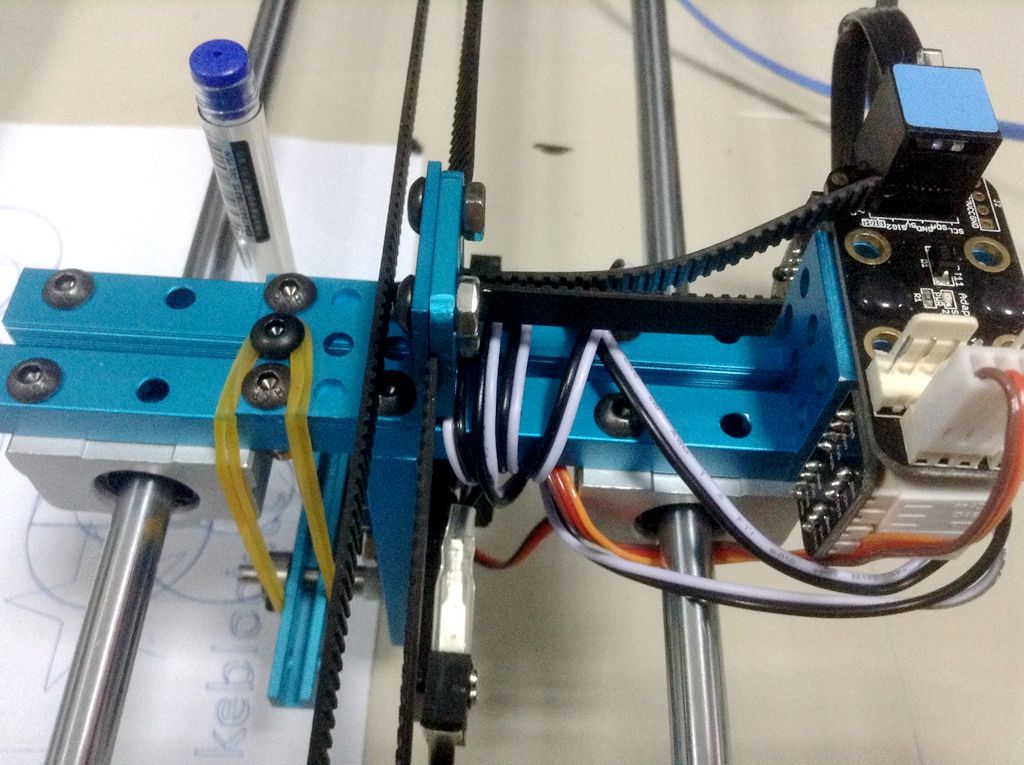
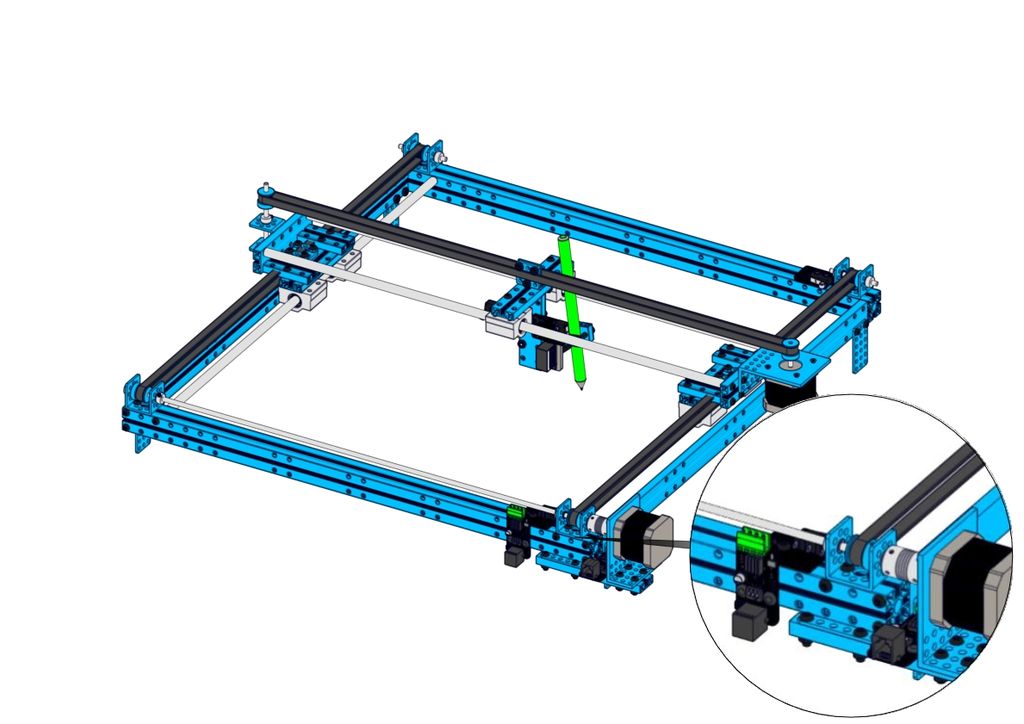
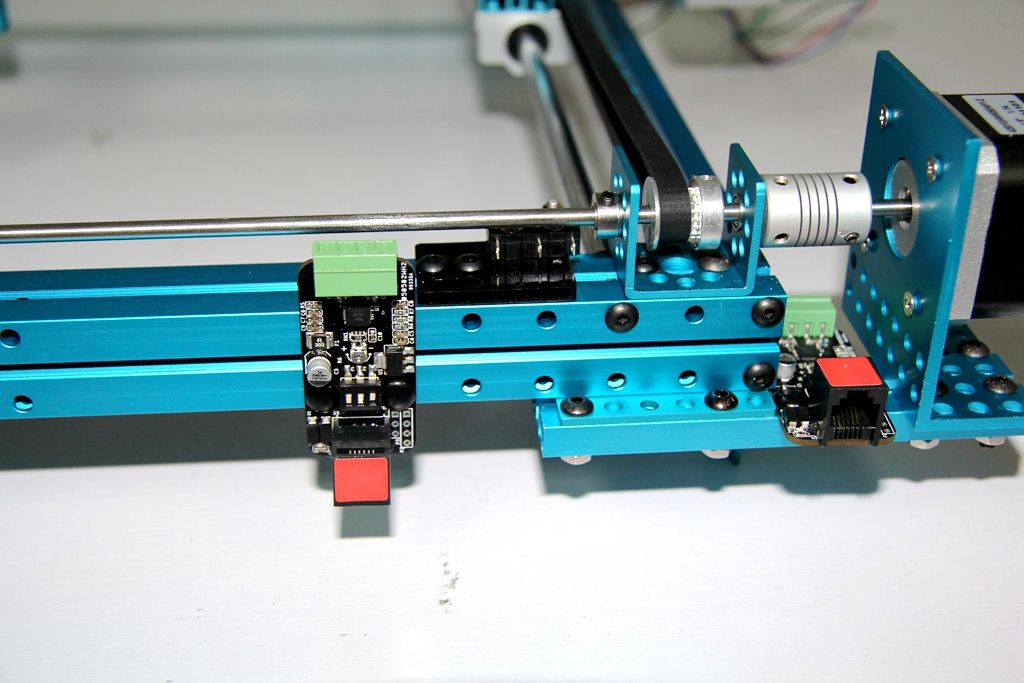
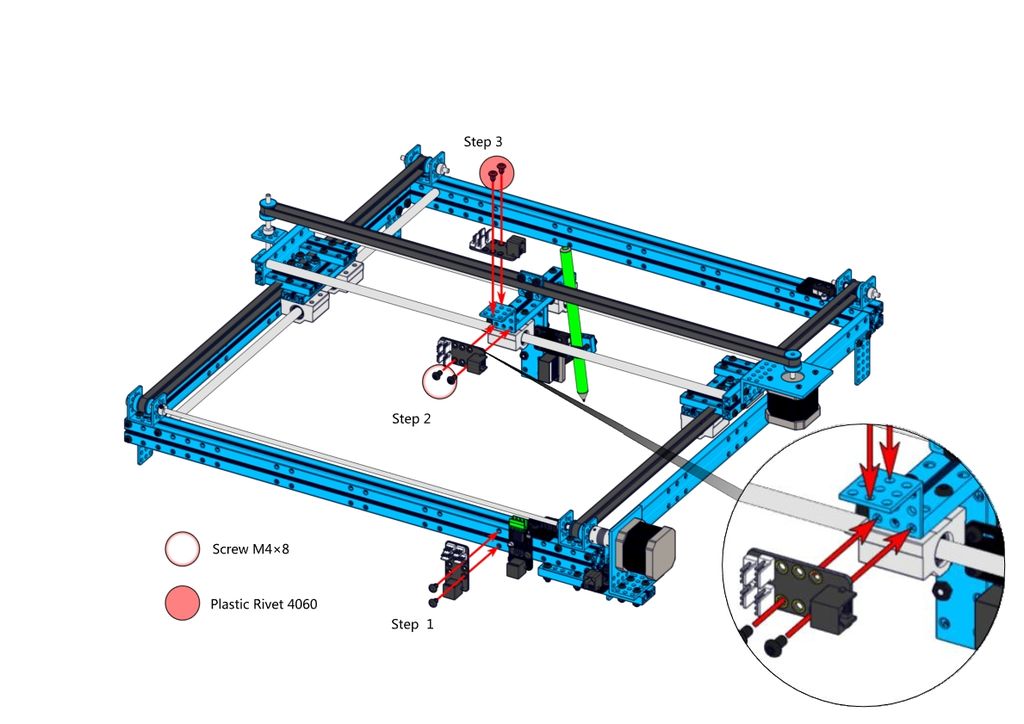
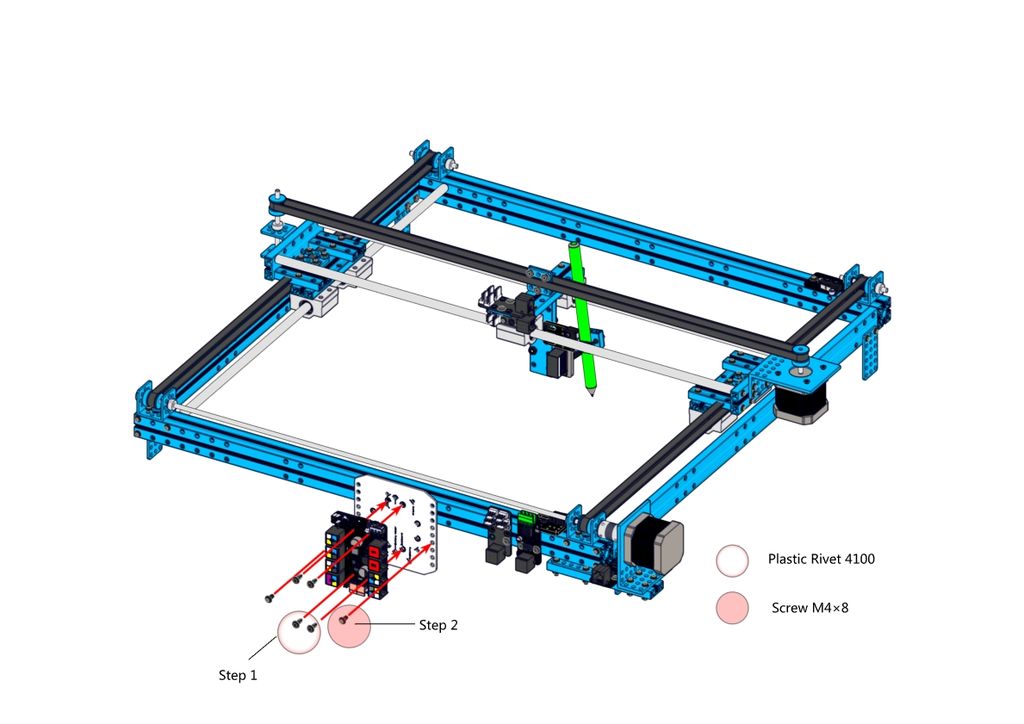
步骤10:安装电子设备
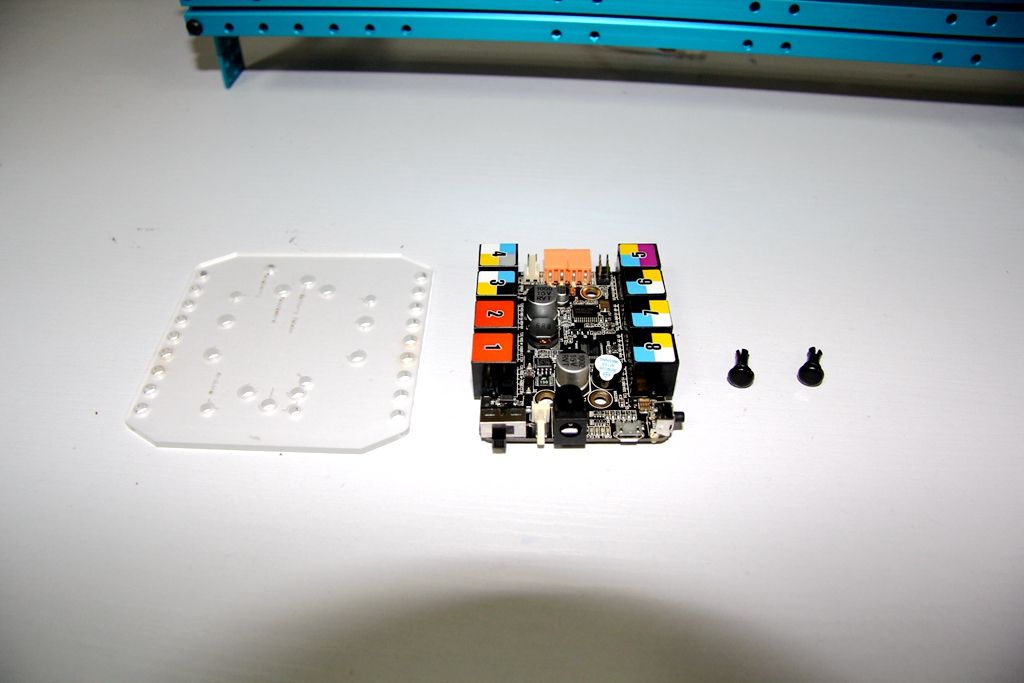
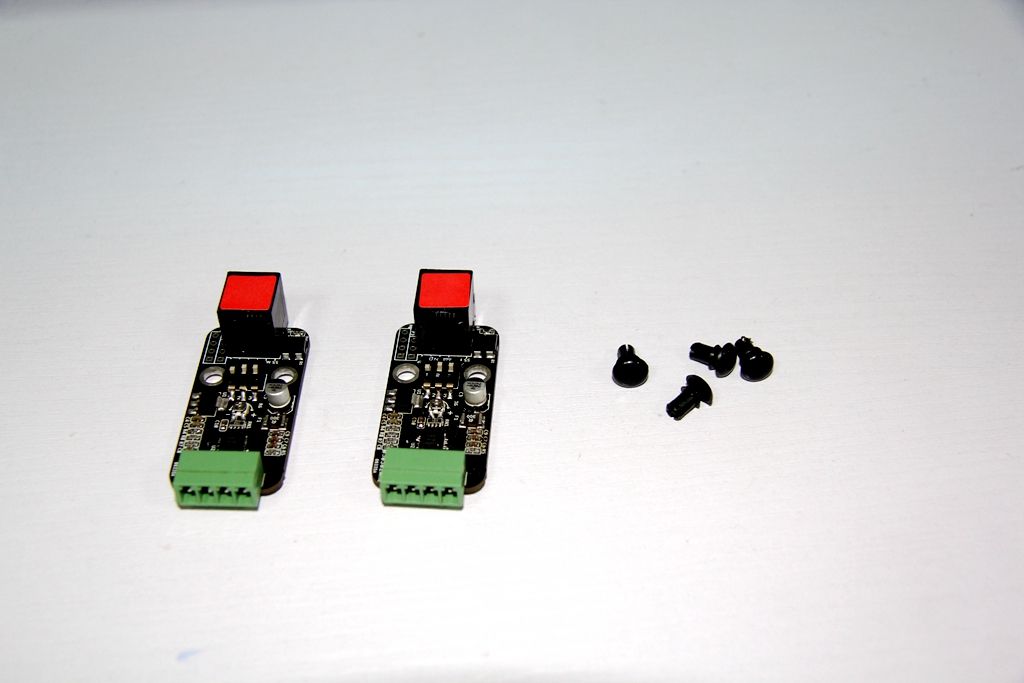
材料列表
1。 Me Stepper驱动程序V1.0 x2
2。 Me RJ25适配器x3
3。 Me Baseboard x1
4。托架3x3 x1
5。底板x1
6。螺钉M4x8 x2
7。塑料铆钉4060 x4
8。塑料铆钉4060 x4
9。螺钉M4x8 x2
10。塑料铆钉4100 x4
步骤
提示,您可能会注意到塑料铆钉有2个部分。首先,将其中一个插入孔中,然后推入另一部分。
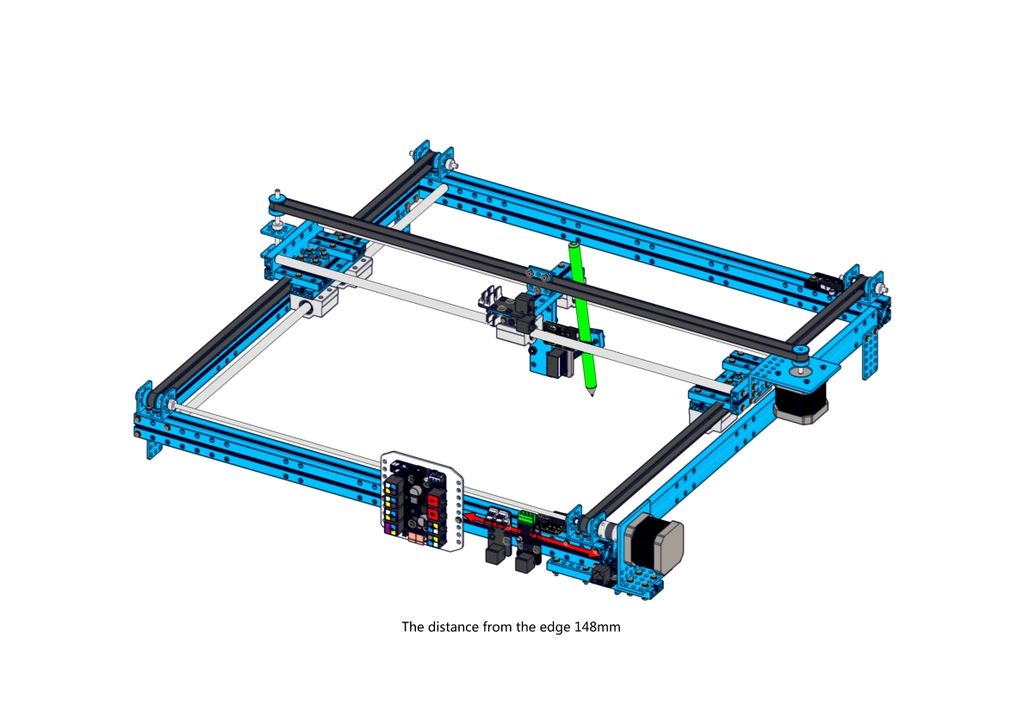
请按照图片安装这些电子设备。
现在,所有组装工作都在完成了!接下来,让我们连接电缆。
步骤11:连接电缆
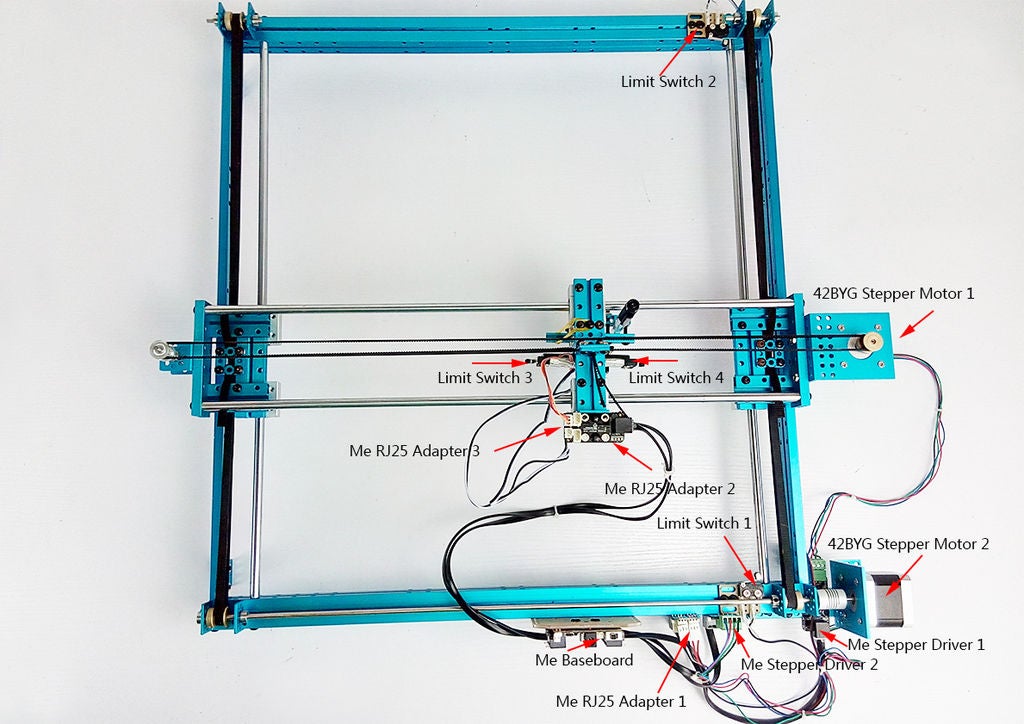
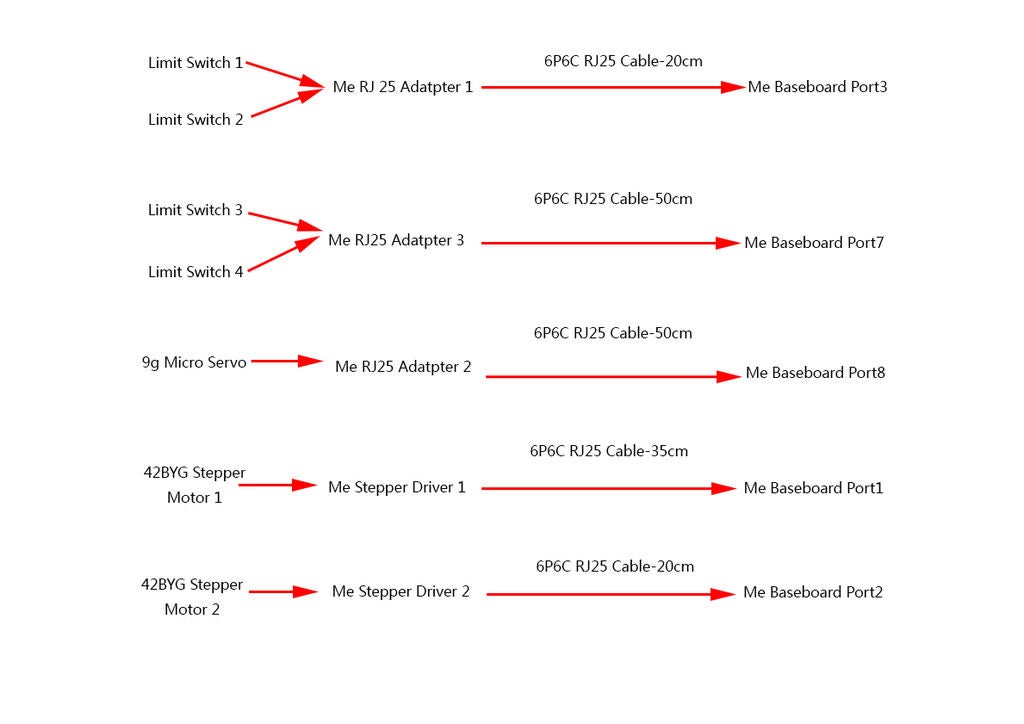
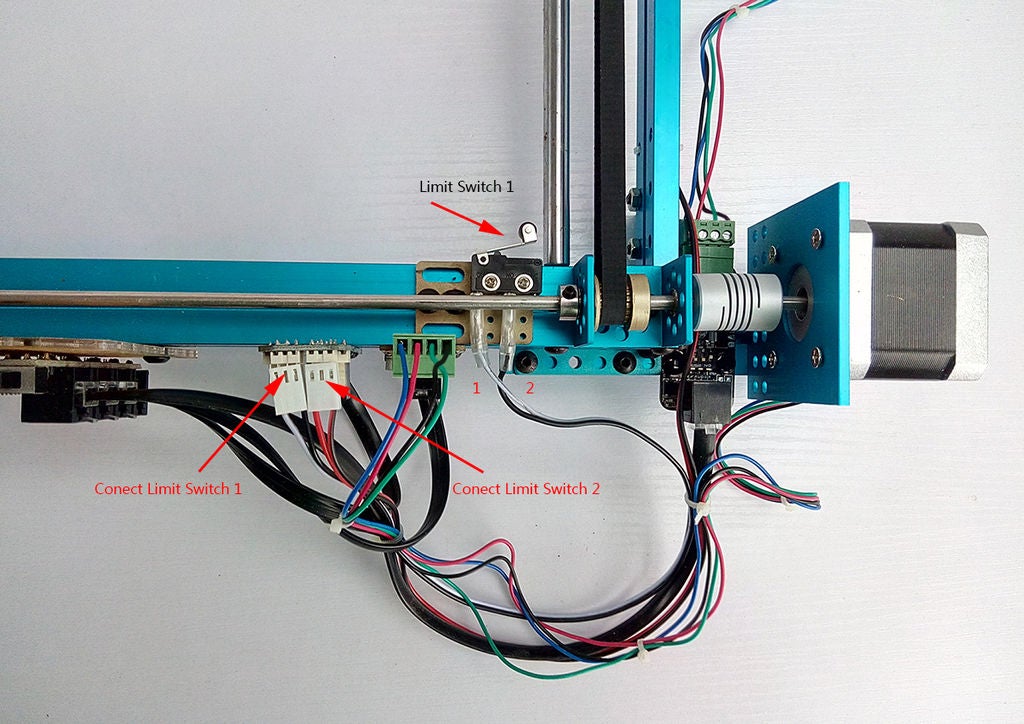
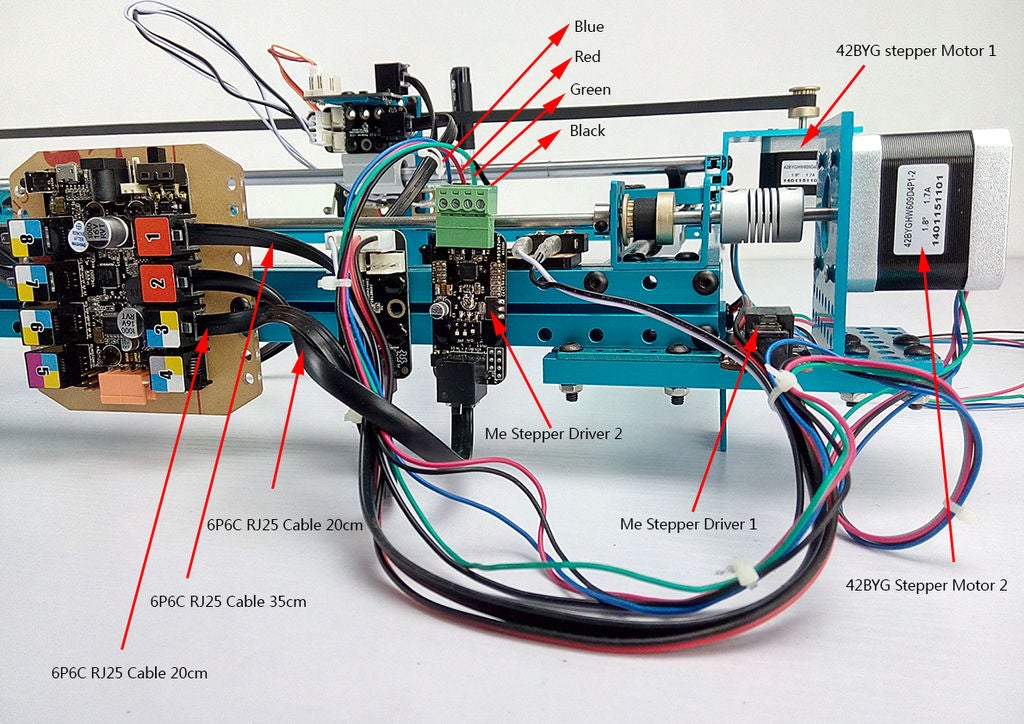
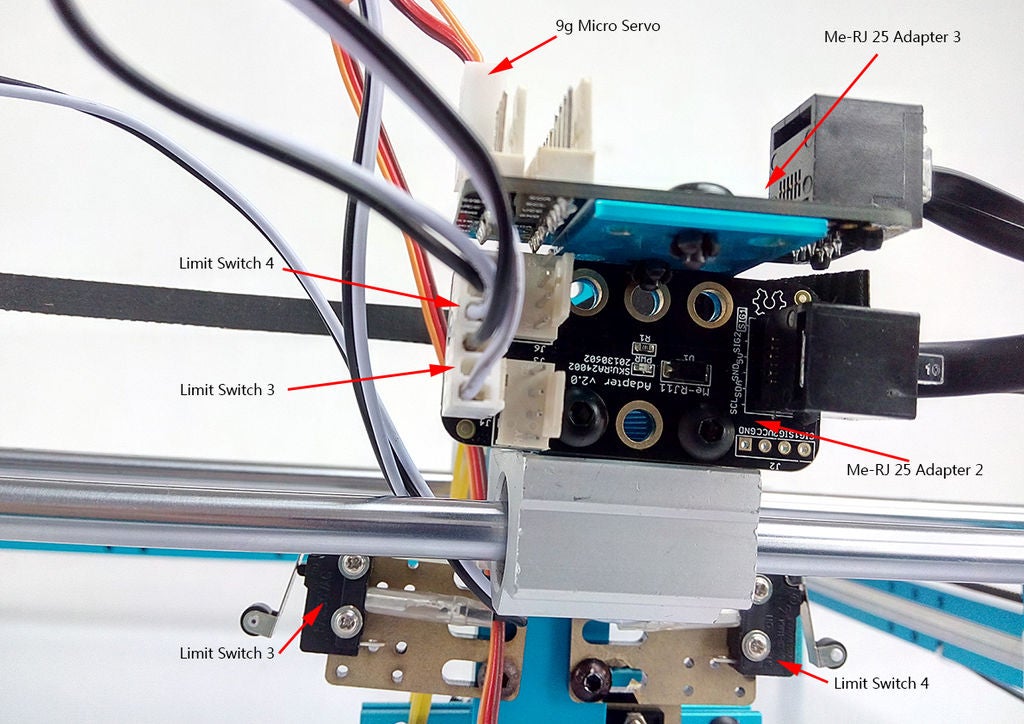
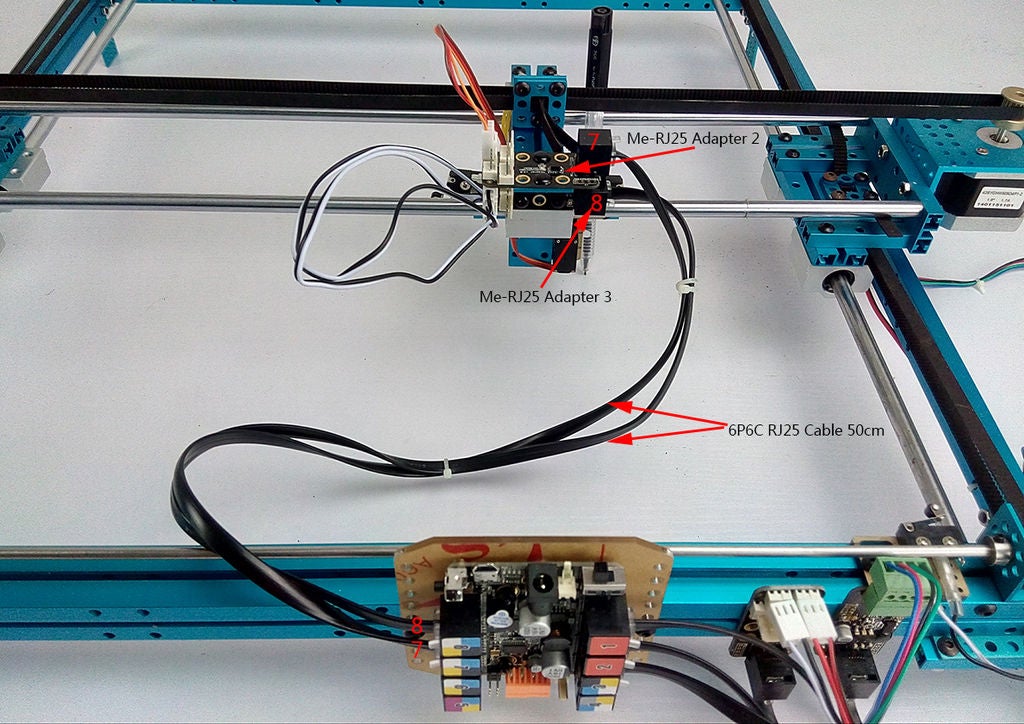
那么多电缆!?别紧张,按照说明进行操作,这将非常容易。但是,总是需要了解一些
1。至于步进器,请不要弄乱电缆的顺序。您可以在图片上找到正确的顺序。
2。微型开关上有三个引脚,但您只需要其中两个即可。逐步按照说明进行操作,不要在这些开关上犯错误。
步骤12:绘制第一张图片
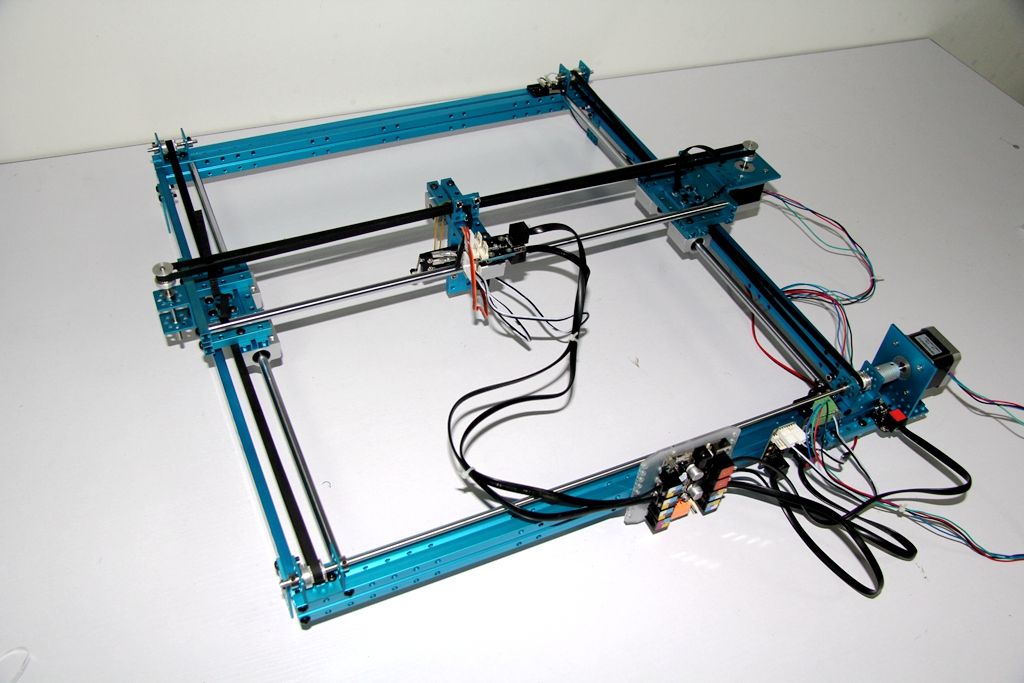
最后,我们完成了所有机械步骤。
准备工作
第一,请在此处下载完整的软件包
该软件包包含以下内容:软件(Arduino固件和GRemote),结构组装说明和完整的程序说明。
2,下载并安装Arduino-1.0.5,http://arduino.cc/en/Main/Software
3。用微型USB电缆将Me底板连接到计算机。
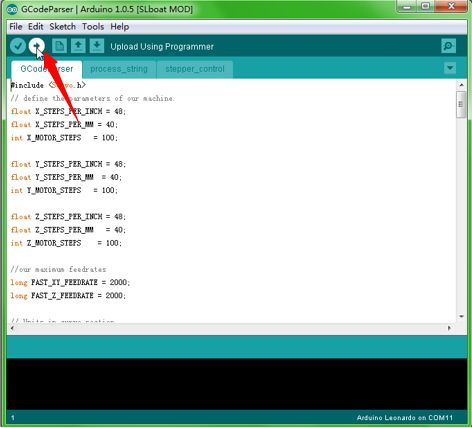
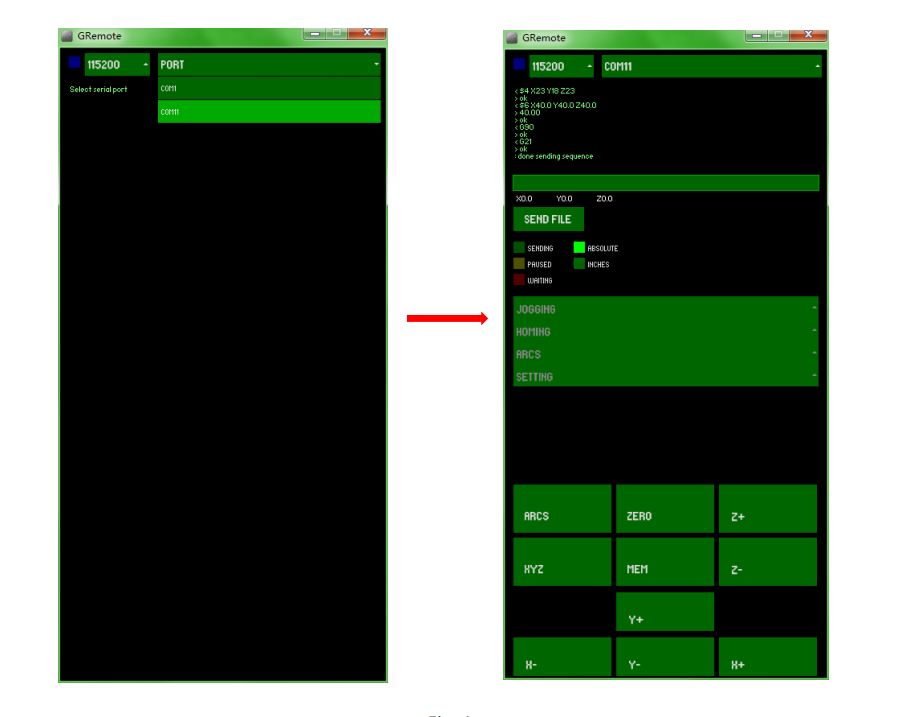
4。通过Arduino IDE打开GCodepraser-》 GCodeParser.ino。单击工具-》串行端口,选择COM XX(不是COM1和COM2)。单击工具-》板,选择Arduino Leonardo。最后,单击左上角的“上传”按钮。
5。关闭Arduino IDE,打开GRemoteFull-》 GRemote.bat。
6。设置COM端口,然后GRemote将向您显示UI作为第二张图片。就这部分而言。
7。现在,您可以通过鼠标和键盘控制XY-Plotter 2.0。并且,您也可以使用Gcode运行它。您可以通过其他软件(dxf2gcode(https://code.google.com/p/dxf2gcode/)或任何其他功能)生成Gcode文件。您应该使用.cnc保存Gcode文件,然后通过GRemote打开它。
尝试绘制拳头图片
点击“发送文件”按钮,然后选择文件demo/fish-pencil G代码example.cnc
。然后,绘图仪将在纸上自动绘制以下图片。
如何进行DIY
如果要更改源代码,可以在以下位置找到它GRemotFull/源极/GRemote.pde。
1。下载并安装Processing-2.1.2。 http://processing.org/
2。安装处理库controlP5-将整个文件夹复制到C: Users xxx Documents Processing libraries
3。通过处理打开GRemote.pde,然后输入代码,然后单击“运行”按钮进行测试。
有关更多详细信息,请参阅包装中的完整软件说明。
步骤13:结束
仅此而已!实际上,绘制不仅是Makeblock XY绘图仪2.0所能做的。您可以轻松地将其修改为Mini CNC或激光雕刻机。至于CNC,您可以参考http://blog.thisisnotrocketscience.nl/projects/makeblock-pcb-cnc-mill/
关于激光二极管,您可以在200mw的ebay上购买,蓝色二极管就足够了。
-
绘图
+关注
关注
0文章
26浏览量
19642
发布评论请先 登录
相关推荐
全面解析三维绘图软件:市场概览与选择指南

VFE2000设备长时运行状态记录仪
芯片封装——组装
与白光干涉仪相关的精度概念都有哪些

飞创XY直线模组十字滑台模组定制案例
CYUSB3014 USB 3.0可作为2.0工作,但不能作为3.0工作,为什么?
CT分析仪试验运行流程——每日了解电力知识

smt电子组装有哪些生产步骤和特点
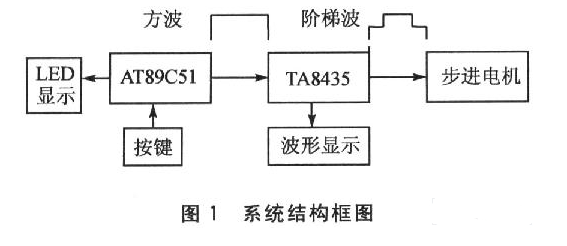
TA8435芯片的使用与控制详细介绍
XY6771 AI 安卓智能核心板(MT6771 P60平台)性能如何?
XY6739 4G 安卓核心板的性能特点及应用






 工商网监
工商网监
评论