 如何制作具有WiFi功能的微型振荡器
如何制作具有WiFi功能的微型振荡器
步骤1:需要准备的事情
您需要的零件:
飞行控制器板,此处为“ SP Racing F3 EVO拉丝”。
8520有刷电机* 4
65mm桨叶螺旋桨支柱
1S 3.7V 300〜600mAh锂电池
ESP-01 wifi模块
任何用于Micro-qaudrotor的框架,您都可以DIY或从任何地方购买。
所需的工具/物品:
烙铁
焊料
胶带
泡沫胶带
热胶
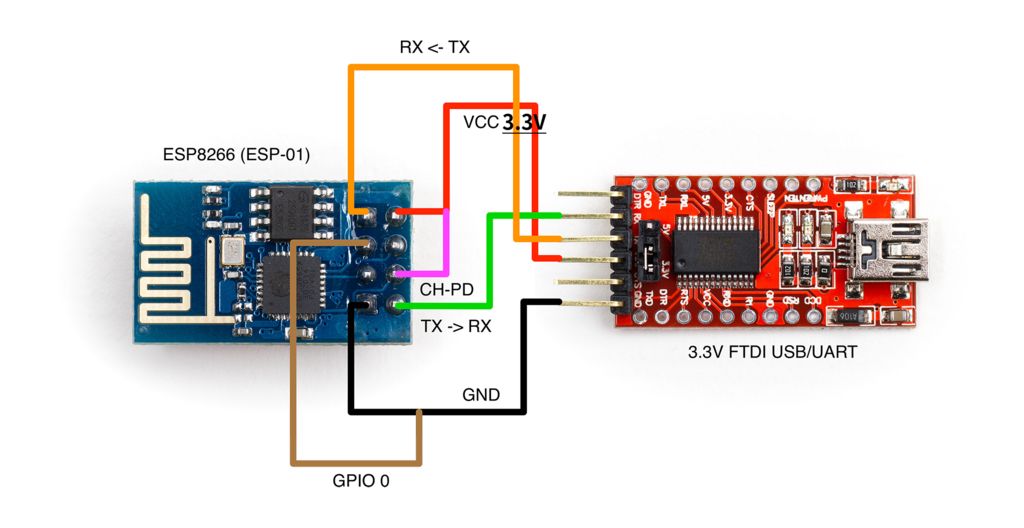
步骤2:刷新ESP8266固件和设置WiFi模块!
下载esp-link固件:https://github.com/jeelabs/esp-link
并通过UART将其刷新到USB桥。
刷新后,重新启动ESP-01,
,您会找到一个名为“ ESP_XXXXXX”的SSID。
(XXXXXX是ESP-01模块的MAC地址的至少3个字节)
连接它,然后在浏览器中打开http://192.168.4.1。
转到“调试日志”页面,设置为“关闭”。
转到“在“ uC控制台”页面上,将“波特”设置为“ 115200”。
您还可以更改任何其他所需的内容(例如:SSID,pas剑。..)
*接线图来自https://pixhawk.org/peripherals/8266
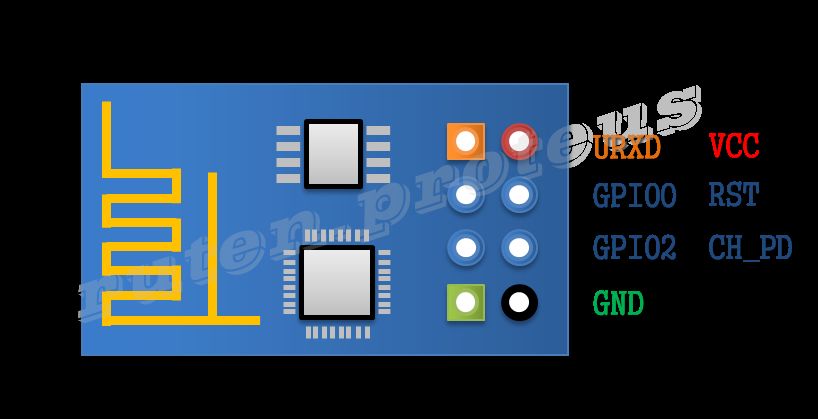
* ESP-01引脚图来自http://ruten-proteus。 blogspot.tw/2014/12/esp8266-a 。..
步骤3:连接并放置所有东西!
步骤4:无人机设置
注意:Betaflight @ 3.4.0 +,Cleanflight @ 2.4.0 +删除了所有F3板的“ RX_MSP”,这是从应用进行控制所必需的。 您可能需要刷新旧版本或构建“ RX_MSP”启用版本的固件。
1)使用Clean/Betaflight配置器通过USB电缆连接FC(具体取决于
2)转到“端口”选项卡。
-UART1行-》激活“ MSP”。
-保存并重新启动
3)转到“配置”选项卡。
-混合器-》 Quad X
-接收器模式-》“ RX_MSP”。
-设置电动机停止
-最小油门= 1000,最大油门= 2000,最小命令= 1100
-保存并重新启动
4)进入“模式”选项卡
-如果您希望通过AUX1按钮进行设防,则将“ ARM”设置为AUX1。
-设置飞行模式(可选)。 Acro/Rate模式是默认设置,因此,如果您想使用Angle和Horizon,则需要立即进行设置。
-我通常将Angle模式设置为AUX2,将Horizon模式设置为AUX3,Acro/Rate
5)在“ CLI”选项卡上
-电机抖动/启动旋转-》输入:“ set motor_pwm_rate = 16000”。
-输入:“保存”。
-将自动重启。
6)“ Receiver”选项卡
-您可以检查控制命令这里。
PS。感谢rschoi_75的设置指南,大多数部分都是相同的,只有RX部分是不同的。
步骤5:连接并飞行!
注意:Betaflight @ 3.4.0 +,Cleanflight @ 2.4.0 +删除了所有F3板的“ RX_MSP”,这是从应用进行控制所必需的。您可能需要刷新旧版本或构建“ RX_MSP”启用版本的固件。
下载此应用:link1:https://drive.google.com/open?id=0B- ud10kmI-kSZXhhdFROTndwYWs,链接2:https://github.com/cs8425/msp-controller/releases
,或者您也可以自己构建:https://github.com/cs8425/msp-controller
连接到无人机的wifi SSID,
打开名为“ MSP-Controller”的应用,
单击左上角的发射器图标,
类型在“ tcp://192.168.4.1:2323”中,单击“连接”,
,您会看到状态将被更新。
,然后将四旋翼作为您的设置!
-
振荡器
+关注
关注
28文章
3840浏览量
139171 -
WIFI
+关注
关注
81文章
5301浏览量
204081
发布评论请先 登录
相关推荐
压控晶体振荡器和石英晶体振荡器的区别
压控振荡器仿真原理是什么
压控振荡器vco工作原理是什么
压控振荡器的指标有哪些
高频振荡器和低频振荡器的区别
多谐振荡器电路图 多谐振荡器的工作原理和应用
如何判断振荡器的类型
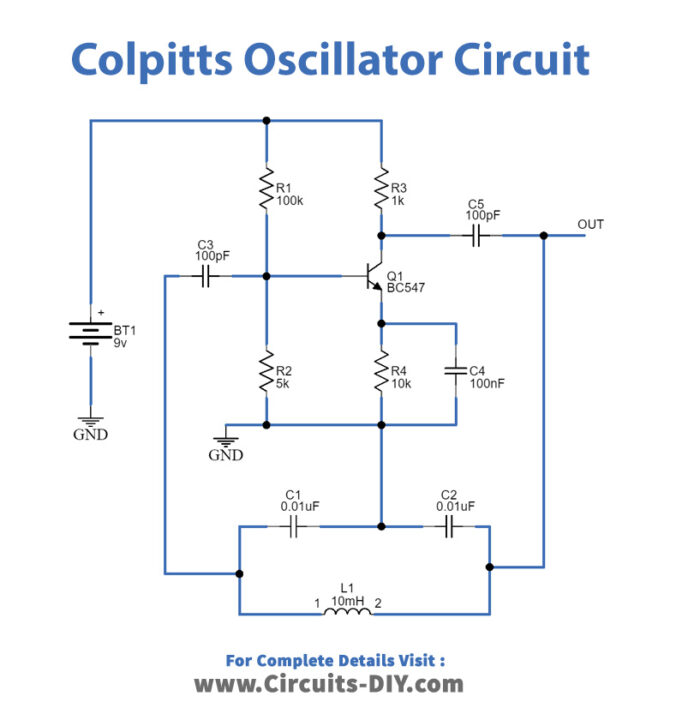
考毕兹振荡器电路图 考毕兹振荡器的工作原理和特点
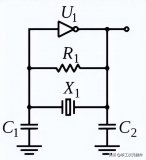
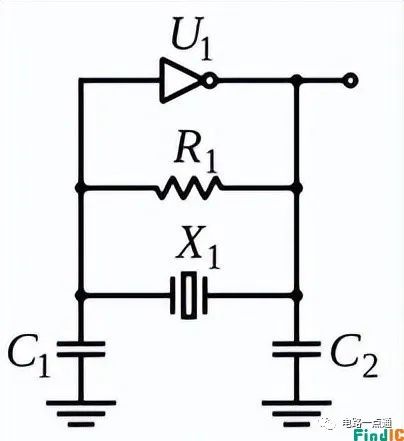
什么是皮尔斯振荡器?皮尔斯振荡器电路如何工作?
多谐振荡器有几个稳态 多谐振荡器的稳态是什么状态
什么是皮尔斯振荡器?皮尔斯振荡器电路原理分析案例





 工商网监
工商网监
评论