 如何将加速度计和陀螺仪数据融合在一起
如何将加速度计和陀螺仪数据融合在一起
步骤1:MPU-6050模块
MPU-6050模块具有8个引脚,
INT:中断数字输出引脚。
AD0: I2C从地址LSB引脚。这是设备7位从机地址中的第0位。如果连接到VCC,则将其读为逻辑1,并且从机地址更改。
XCL:辅助串行时钟引脚。此引脚用于将其他具有I2C接口功能的传感器SCL引脚连接到MPU-6050。
XDA:辅助串行数据引脚。该引脚用于将其他启用I2C接口的传感器SDA引脚连接到MPU-6050。
SCL:串行时钟引脚。将此引脚连接到微控制器的SCL引脚。 SDA:串行数据引脚。将此引脚连接到微控制器的SDA引脚。
GND:接地引脚。将此引脚接地。
VCC:电源引脚。将此引脚连接到+ 5V DC电源。 MPU-6050模块的从站地址(当AD0 = 0时,即未连接到Vcc)为
从站写地址(SLA + W): 0xD0
从站读取地址(SLA + R): 0xD1
步骤2:计算
MPU6050模块的陀螺仪和加速度计传感器数据由2的补码形式的16位原始数据组成。
MPU6050模块的温度传感器数据由16位数据组成(不是2的补码形式)。
现在假设我们选择了
-加速度计满量程范围+/- 2g,灵敏度比例因子为16,384 LSB(Count)/g。
-陀螺仪的满量程范围为+/- 250°/s,灵敏度比例因子为131 LSB(计数)/°/s。然后,
要获取传感器原始数据,我们首先需要对加速度计和陀螺仪的传感器数据进行2的补码运算。在获得传感器原始数据之后,我们可以通过将传感器原始数据除以它们的灵敏度比例因子来计算加速度和角速度,方法如下:
以g(g力)计的加速度计值
ul》
沿X轴的加速度=(加速度计X轴原始数据/16384)g。
沿Y轴的加速度=(加速度计Y轴原始数据/16384)g。
沿Z轴的加速度=(加速度计Z轴原始数据/16384)g。
陀螺仪值,以°/s(每秒度)为单位
沿X轴的角速度=(陀螺仪X轴原始数据/131)°/s。
沿Y轴的角速度=(陀螺仪Y轴原始数据/131)°/s。
沿Z轴的角速度=(陀螺仪Z轴原始数据/131)°/s。
以°/c为单位的温度值(每度摄氏度)
以摄氏度为单位的温度=((温度传感器数据)/340 + 36.53)°/c。
例如
假设在2‘补码之后得到加速度计X轴原始值= +15454
然后Ax = +15454/16384 = 0.94 g。
更多
所以我们知道我们在+/- 2G和+/- 250deg/s的灵敏度下运行,但是我们的值如何与这些加速度/角度相对应。
这两者都是直线图,我们可以从中得出结果,对于1G,我们将读取16384,对于1deg/sec,我们将读取131.07(尽管由于二进制,0.07将被忽略),这些值只是通过绘制直线图得出的在32767时2G在-32768时为-2G,在250/-250时为-2G。
所以现在我们知道了灵敏度值(16384和131.07),我们只需要减去这些值的偏移量即可。然后
这些对于X和Y值都适用,但是由于Z记录为1G而不是0,因此在除以灵敏度之前,我们需要减去1G(16384)。
步骤3:MPU6050-Atmega328p连接
。..
连接如下:-
MPU6050 《======》 Arduino Nano。
VCC 《====== 》 5v输出引脚
GND 《======》接地引脚
SDA 《======》 A4引脚//串行数据
SCL 《======》 A5引脚//串行时钟
俯仰和横滚计算:
滚动是围绕旋转x轴和螺距是沿y轴的旋转。
结果以弧度为单位。 (乘以180并除以pi即可转换为度)
步骤4:代码和说明
#include
const int MPU=0x68; //I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ; //16-bit integers
int AcXcal,AcYcal,AcZcal,GyXcal,GyYcal,GyZcal,tcal; //calibration variables
double t,tx,tf,pitch,roll;
void setup()
{
Wire.begin(); //initiate wire library and I2C
Wire.beginTransmission(MPU); //begin transmission to I2C slave device
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true); //ends transmission to I2C slave device
Serial.begin(9600); //serial communication at 9600 bauds
}
void loop()
{
Wire.beginTransmission(MPU); //begin transmission to I2C slave device
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false); //restarts transmission to I2C slave device
Wire.requestFrom(MPU,14,true); //request 14 registers in total
//Acceleration data correction
AcXcal = -950;
AcYcal = -300;
AcZcal = 0;
//Temperature correction
tcal = -1600;
//Gyro correction
GyXcal = 480;
GyYcal = 170;
GyZcal = 210;
//read accelerometer data
AcX=Wire.read()《《8|Wire.read(); // 0x3B (ACCEL_XOUT_H) 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()《《8|Wire.read(); // 0x3D (ACCEL_YOUT_H) 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()《《8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) 0x40 (ACCEL_ZOUT_L)
//read temperature data
Tmp=Wire.read()《《8|Wire.read(); // 0x41 (TEMP_OUT_H) 0x42 (TEMP_OUT_L)
//read gyroscope data
GyX=Wire.read()《《8|Wire.read(); // 0x43 (GYRO_XOUT_H) 0x44 (GYRO_XOUT_L)
GyY=Wire.read()《《8|Wire.read(); // 0x45 (GYRO_YOUT_H) 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()《《8|Wire.read(); // 0x47 (GYRO_ZOUT_H) 0x48 (GYRO_ZOUT_L)
//temperature calculation
tx = Tmp + tcal;
t = tx/340 + 36.53; //equation for temperature in degrees C from datasheet
tf = (t * 9/5) + 32; //fahrenheit
//get pitch/roll
getAngle(AcX,AcY,AcZ);
//printing values to serial port
Serial.print(“Angle: ”);
Serial.print(“Pitch = ”); Serial.print(pitch);
Serial.print(“ Roll = ”); Serial.println(roll);
Serial.print(“Accelerometer: ”);
Serial.print(“X = ”); Serial.print(AcX + AcXcal);
Serial.print(“ Y = ”); Serial.print(AcY + AcYcal);
Serial.print(“ Z = ”); Serial.println(AcZ + AcZcal);
Serial.print(“Temperature in celsius = ”); Serial.print(t);
Serial.print(“ fahrenheit = ”); Serial.println(tf);
Serial.print(“Gyroscope: ”);
Serial.print(“X = ”); Serial.print(GyX + GyXcal);
Serial.print(“ Y = ”); Serial.print(GyY + GyYcal);
Serial.print(“ Z = ”); Serial.println(GyZ + GyZcal);
delay(1000);
}
//function to convert accelerometer values into pitch and roll
void getAngle(int Ax,int Ay,int Az)
{
double x = Ax;
double y = Ay;
double z = Az; pitch = atan(x/sqrt((y*y) + (z*z))); //pitch calculation
roll = atan(y/sqrt((x*x) + (z*z))); //roll calculation
//converting radians into degrees
pitch = pitch * (180.0/3.14);
roll = roll * (180.0/3.14) ;
}
-----------------------------------------------------------------------------------------------
Results:-
--------------------------------------------------------------------------------------
Angle: Pitch = 88.89 Roll = -0.47
Accelerometer: X = 15974 Y = -440 Z = 312
Temperature in celsius = 29.38 fahrenheit = 84.88
Gyroscope: X = -111 Y = 341 Z = 211
Angle: Pitch = 89.41 Roll = -0.27
Accelerometer: X = 16102 Y = -380 Z = 172
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -115 Y = 373 Z = 228
Angle: Pitch = 89.28 Roll = -0.34
Accelerometer: X = 16058 Y = -400 Z = 204
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -98 Y = 354 Z = 224
Angle: Pitch = 88.83 Roll = -0.54
Accelerometer: X = 15978 Y = -460 Z = 320
Temperature in celsius = 29.33 fahrenheit = 84.79
Gyroscope: X = -124 Y = 376 Z = 207
Angle: Pitch = 89.21 Roll = -0.31
Accelerometer: X = 15978 Y = -392 Z = 228
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -121 Y = 364 Z = 189
Angle: Pitch = 89.00 Roll = -0.56
Accelerometer: X = 15890 Y = -464 Z = 260
Temperature in celsius = 29.38 fahrenheit = 84.88
Gyroscope: X = -111 Y = 361 Z = 221
Angle: Pitch = 88.67 Roll = -0.65
Accelerometer: X = 16018 Y = -492 Z = 360
Temperature in celsius = 29.38 fahrenheit = 84.88
Gyroscope: X = -130 Y = 340 Z = 216
Angle: Pitch = 88.53 Roll = -0.43
Accelerometer: X = 16110 Y = -428 Z = 432
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -92 Y = 380 Z = 217
Angle: Pitch = 88.85 Roll = -0.60
Accelerometer: X = 15930 Y = -476 Z = 304
Temperature in celsius = 29.47 fahrenheit = 85.05
Gyroscope: X = -102 Y = 374 Z = 219
Angle: Pitch = 88.87 Roll = -0.24
Accelerometer: X = 16222 Y = -372 Z = 344
Temperature in celsius = 29.52 fahrenheit = 85.13
Gyroscope: X = -96 Y = 351 Z = 226
Angle: Pitch = 89.05 Roll = -0.26
Accelerometer: X = 15970 Y = -376 Z = 284
Temperature in celsius = 29.38 fahrenheit = 84.88
Gyroscope: X = -105 Y = 367 Z = 201
Angle: Pitch = 89.13 Roll = -0.62
Accelerometer: X = 16034 Y = -484 Z = 200
Temperature in celsius = 29.52 fahrenheit = 85.13
Gyroscope: X = -110 Y = 391 Z = 207
Angle: Pitch = 88.98 Roll = -0.51
Accelerometer: X = 16178 Y = -452 Z = 280
Temperature in celsius = 29.47 fahrenheit = 85.05
Gyroscope: X = -117 Y = 379 Z = 221
Angle: Pitch = 89.27 Roll = -0.43
Accelerometer: X = 16066 Y = -428 Z = 192
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -101 Y = 359 Z = 208
Angle: Pitch = 89.31 Roll = -0.19
Accelerometer: X = 16150 Y = -356 Z = 212
Temperature in celsius = 29.52 fahrenheit = 85.13
Gyroscope: X = -115 Y = 361 Z = 189
Angle: Pitch = 88.76 Roll = -0.51
Accelerometer: X = 16026 Y = -452 Z = 348
Temperature in celsius = 29.42 fahrenheit = 84.96
Gyroscope: X = -139 Y = 368 Z = 192
Angle: Pitch = 88.57 Roll = -0.69
Accelerometer: X = 16086 Y = -504 Z = 388
Temperature in celsius = 29.33 fahrenheit = 84.79
Gyroscope: X = -118 Y = 352 Z = 214
步骤5:了解倾斜角
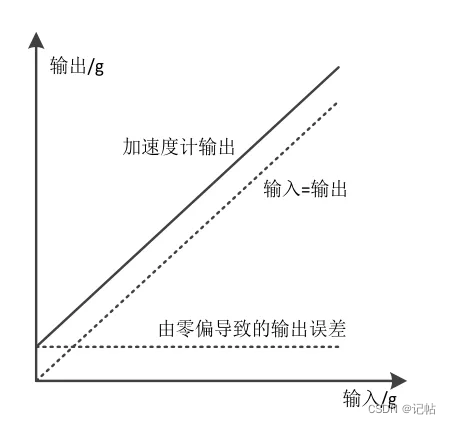
加速度计
地球的重力是恒定的加速度,力始终指向降到地球中心。
当加速度计与重力平行时,测得的加速度将为1G,当加速度计与重力垂直时,加速度将为0G。
倾斜角可以使用以下公式从测量的加速度中计算出:
θ= sin-1(测量的加速度/重力加速度)
陀螺仪
陀螺仪(又称速率传感器)用于测量角速度(ω)。
为了获得机器人的倾斜角,我们需要将陀螺仪的数据如下式所示:
ω=dθ/dt,
θ=∫ωdt
Gyro和加速度传感器Fusio n
在研究了陀螺仪和加速度计的特性之后,我们知道它们各有优缺点。根据加速度计数据计算出的倾斜角具有较慢的响应时间,而根据陀螺仪数据计算出的积分倾斜角会在一段时间内发生漂移。换句话说,可以说加速度计数据对长期有用,而陀螺仪数据对短期有用。
责任编辑:wv
-
陀螺仪
+关注
关注
44文章
795浏览量
99068 -
加速度计
+关注
关注
6文章
707浏览量
46123
发布评论请先 登录
相关推荐
十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙

MEMS加速度计的工作原理是什么
EPSON工业级加速度计选型


陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算

陀螺仪LSM6DSOW开发(9)----加速度校准
陀螺仪LSM6DSOW开发(5)----MotionFX库解析空间坐标

e2studio开发三轴加速度计LIS2DW12(2)----基于中断信号获取加速度数据

陀螺仪LSM6DSOW开发(4)----中断获取FIFO数据
陀螺仪LSM6DSOW开发(2)----上报匿名上位机实现可视化
驱动LSM6DS3TR-C实现高效运动检测与数据采集(10)----融合磁力计进行姿态解算
陀螺仪LSM6DSV16X与AI集成(8)----MotionFX库解析空间坐标

三轴加速度计LIS2DUX12开发(2)----静态校准
陀螺仪传感器,IMU和加速度计的产品和选型
爱普生三轴加速度计传感器HGPM01





 工商网监
工商网监
评论