 怎样为Arduino构建L293D电机板控制器
怎样为Arduino构建L293D电机板控制器
步骤1:该项目所需的材料

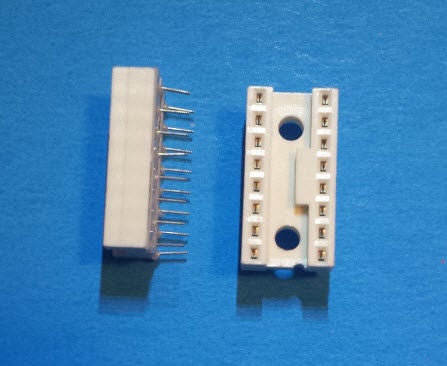
2个DIP IC插座
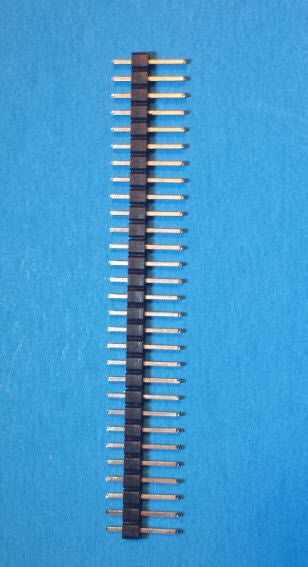
插针接头
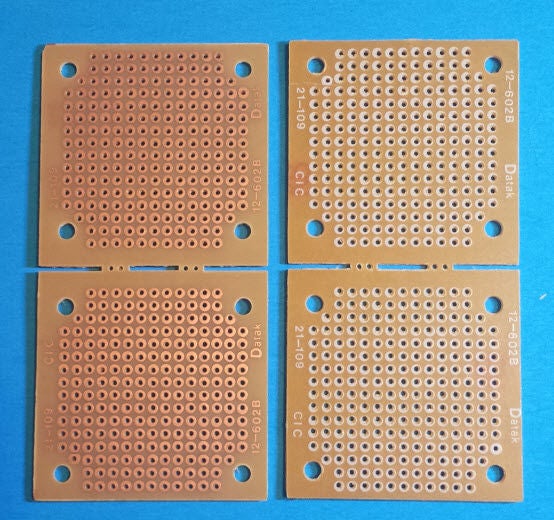
PCB板
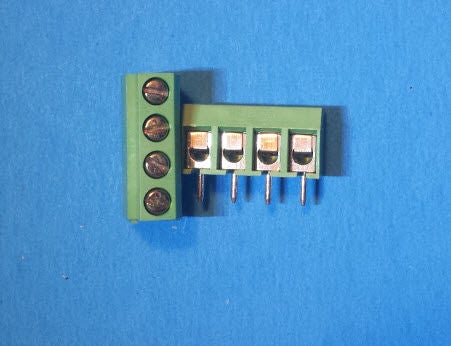
2个螺钉端子每个针脚4个
烙铁
和很多耐心(不包括图片)
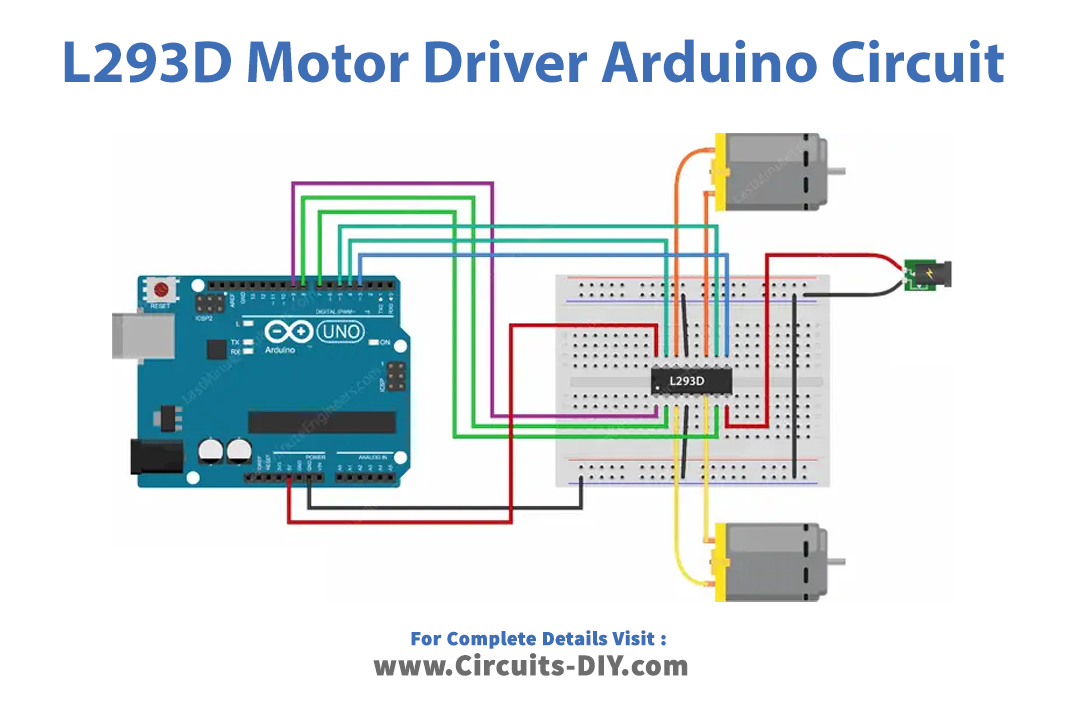
步骤2:让我们了解如何接线单个L293D芯片
这些图片是我在Firtzing和照片编辑器的帮助下完成的。
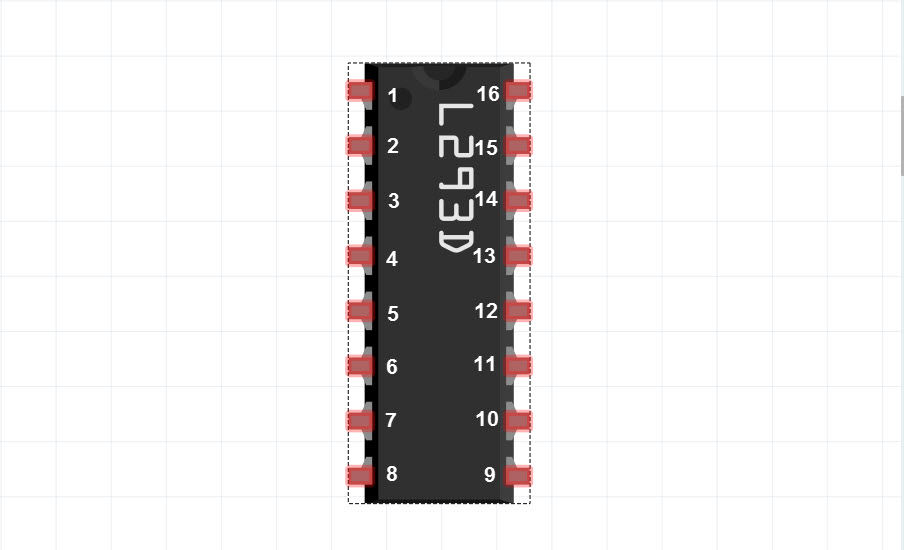
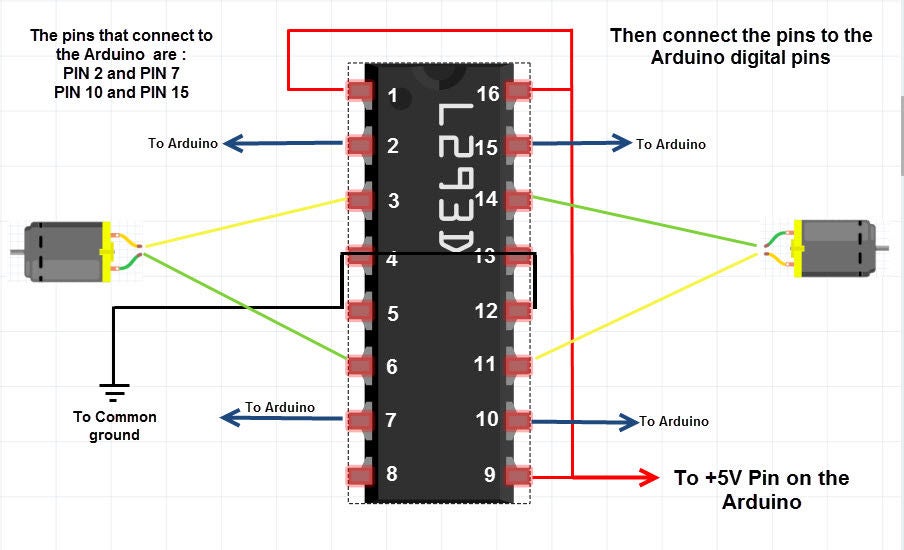
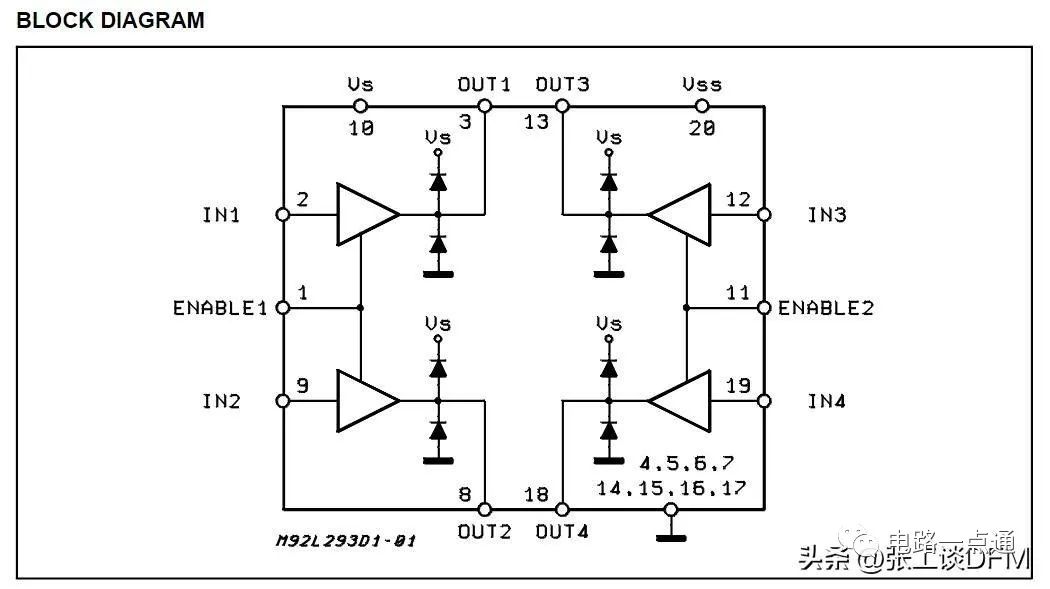
第一张图片显示了L293D引脚的编号方式。
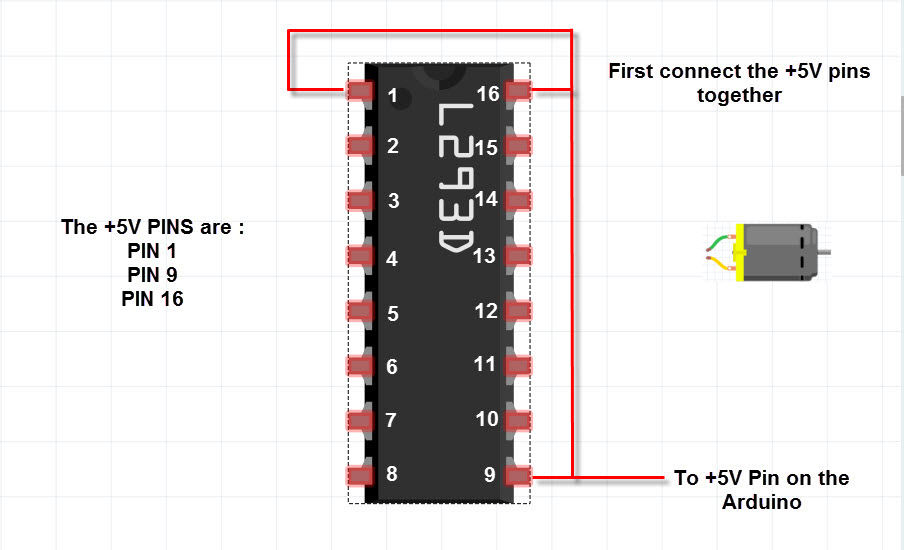
从连接所有需要的引脚开始来自Arduino的5V,将引脚1、16和9连接在一起,然后将它们连接到Arduino上的+ 5V(Vcc)。 (图2-红色接线)
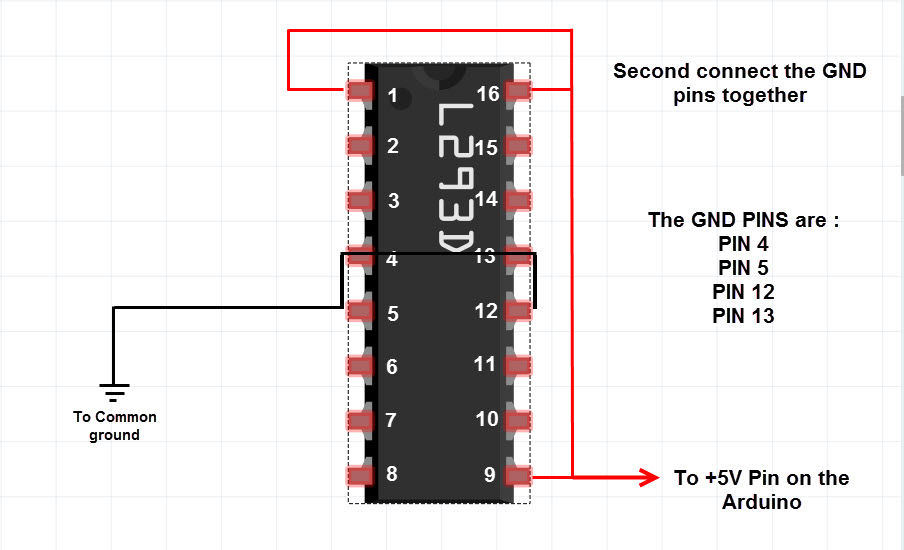
下一步是将接地引脚连接在一起。将引脚4、5、12和13连接在一起,然后将它们连接到Arduino的GND引脚。 (图3,黑色接线)
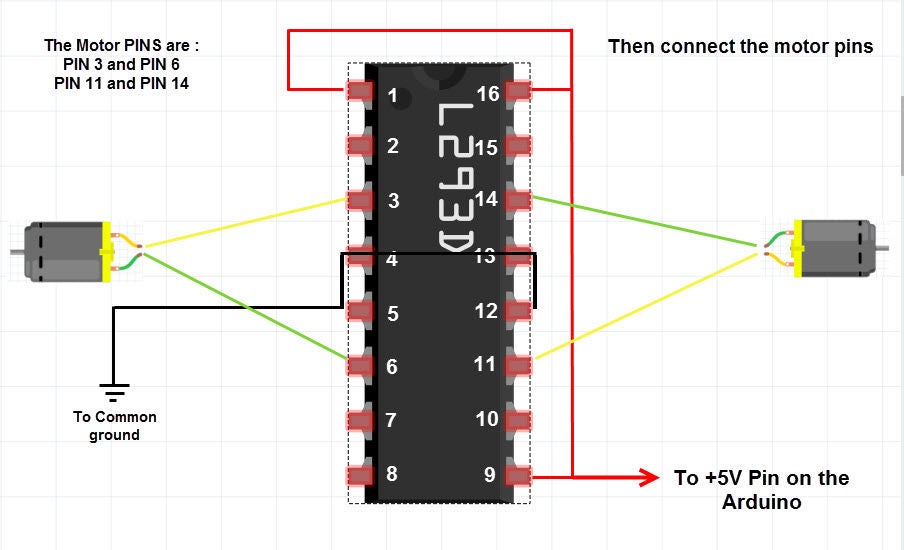
接下来,您要连接电动机引脚。针脚3和6控制一个电机(电机A),针脚14和11控制第二个电机(电机B)。 (第四张图片)
现在将引脚2和7连接到Arduino的数字引脚,它们将用于向Motor A发送命令。引脚10和15也应连接到Arduino的数字引脚。 Arduino控制马达B。(图5)
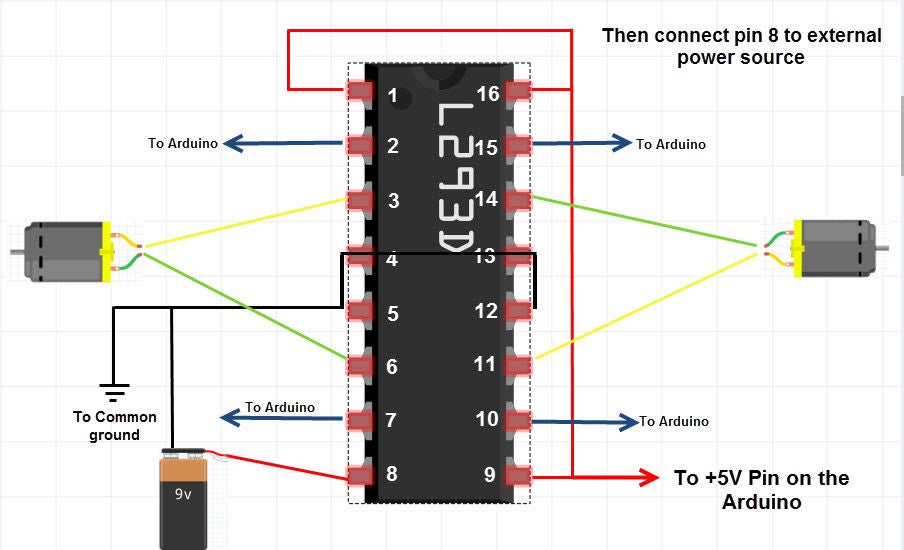
剩下的就是给芯片加电了。为此,请将引脚8连接到外部电源的+ ve端
AKA电池(在我的机器人上,我使用4 AA电池= 6V),然后连接电源的-ve端
第3步:如何连接两个L293D芯片
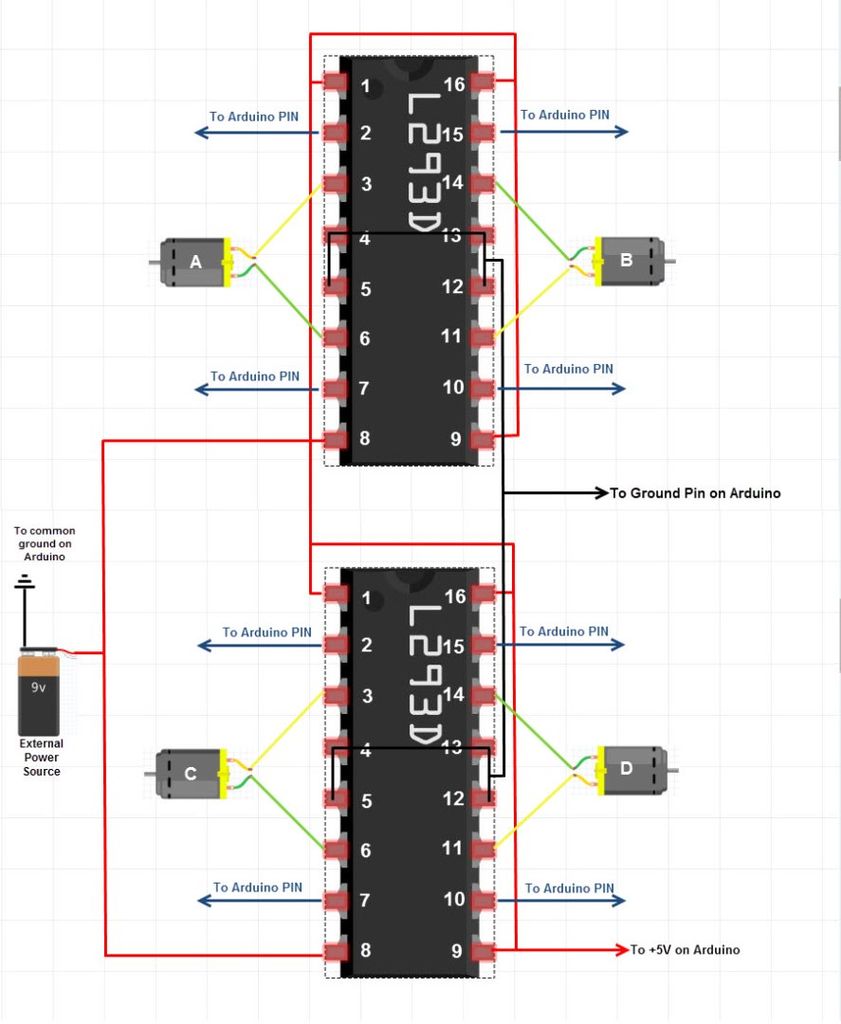
根据上一步的知识,我们将使用一个电源或电池将两个L293D芯片连接在一起,以控制4个电机A,B,C和D。
我们将连接所有需要的引脚来自Arduino的+ 5V,然后将它们全部连接到Arduino上的VCC。
我们将对接地引脚做同样的事情。将它们总共8个引脚连接在一起,并使用一根线将它们连接到Arduino的GND引脚。
要连接电源,首先将第一个L293D的引脚8连接到第二个L293D的引脚8。然后将它们连接到电池的+ ve端,然后将电池在Arduino的GND引脚上接地。
步骤4:制作电路板
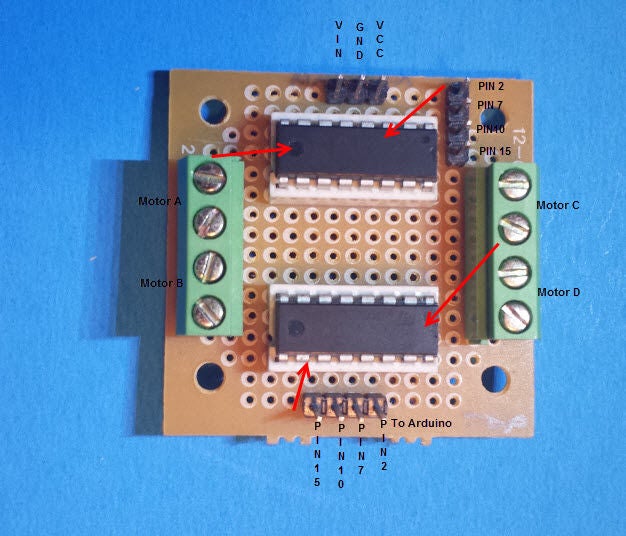
将组件放置在板上而无需焊接任何东西。
当您满意时,将其转过来并开始焊接。
它将变得令人困惑和不知所措,但是为了帮助您,请在一张纸上 向后 画出引脚连接。然后翻阅图纸几次以确保它是正确的。然后根据您绘制的图开始焊接。
并确保在板上贴上标签。
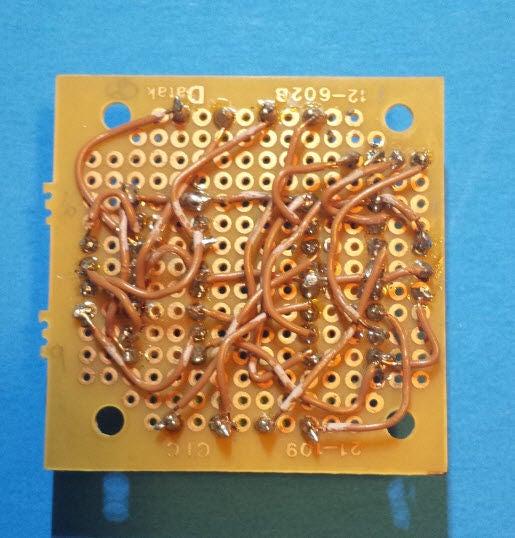
PC板的底部看起来像意大利面条,但是这些电线被隐藏了,使机器人更整洁。
-
控制器
+关注
关注
112文章
16346浏览量
177880 -
Arduino
+关注
关注
188文章
6469浏览量
186980 -
L293D
+关注
关注
4文章
50浏览量
20087
发布评论请先 登录
相关推荐
Made with KiCad(十一):Sangaboard步进电机控制板
电机控制器的原理、类型及应用
使用L293D电机驱动器控制直流电机
什么是电机控制器?它有哪些应用?
电机控制器mcu的作用 电机控制器mcu的功用是什么
arduino控制步进电机代码
如何使用Arduino UNO板和电位器控制伺服电机

L293D驱动器电路图介绍
对话:探讨电机驱动控制器市场的需求空间






 工商网监
工商网监
评论