 如何制作可跟踪200Hz脉冲红外光源的摄像机支架
如何制作可跟踪200Hz脉冲红外光源的摄像机支架
步骤1:材料和设备
所需的设备
热胶枪
旋转工具
烙铁
剪线钳
材料
相机支架 》
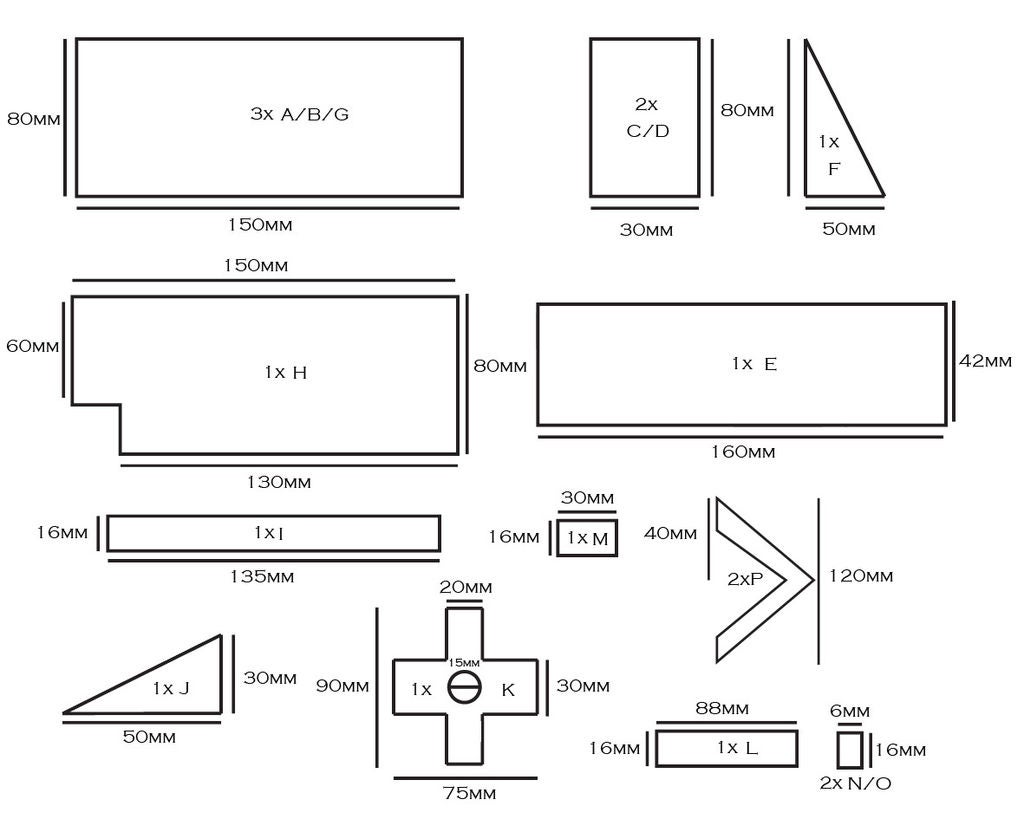
MDF板1200x600x60mm裁切成大小(所有件,上面显示的尺寸)
2 Tower Pro Micro 9g伺服器
胶棒(用于热胶枪)
跟踪系统
4个10K欧姆电阻
1个小型原型PCB
8 400mm长,轻型连接线(红色)
2 150mm长,li ght接线(一红一黑)
4 100mm长,轻型接线(黑)
1 Arduino Uno R3
红外信号源
9个标准红外LED
1个用于LED的原型PCB板-切成尺寸(25x30mm)
1个用于微型放大器的原型PCB板-切成尺寸(25x40mm)
1个40mm热缩管(切入一半,长度方向)
1小安全销
2 750毫米长,轻巧的接线
1 4针端子
2 BC547晶体管
1 400ohm电阻
2 30mm电线链接(一个红色一个黑色)
1 Arduino Uno R3
1颗6xAA电池座
6节AA电池
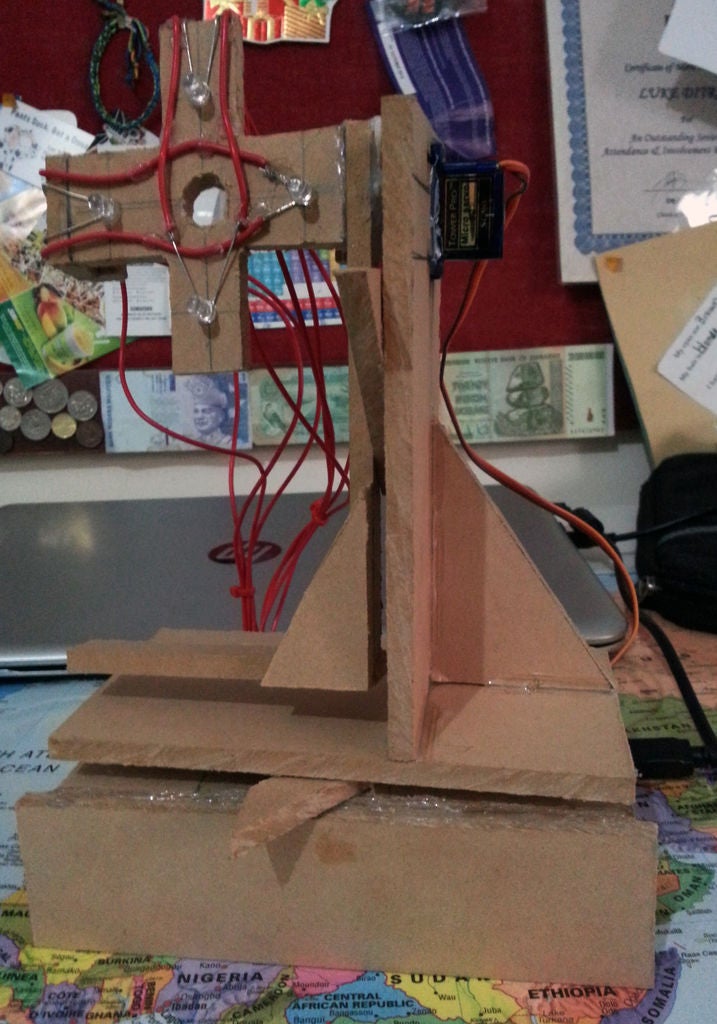
步骤2:构建底座


此相机支架由6mm MDF制成,虽然重量较轻,但较薄的板可能更好。
方法
在MDF板上标记并切出所有碎片(测量结果如上所示)
一旦所有零件都开始,首先要建立基础
将侧面零件(C和D)粘贴到底板(A)上,然后将前面板(E)粘上。
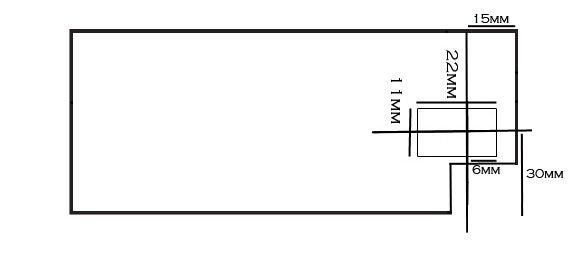
从零件B上切出一个伺服孔(使用旋转工具)-参见测量图
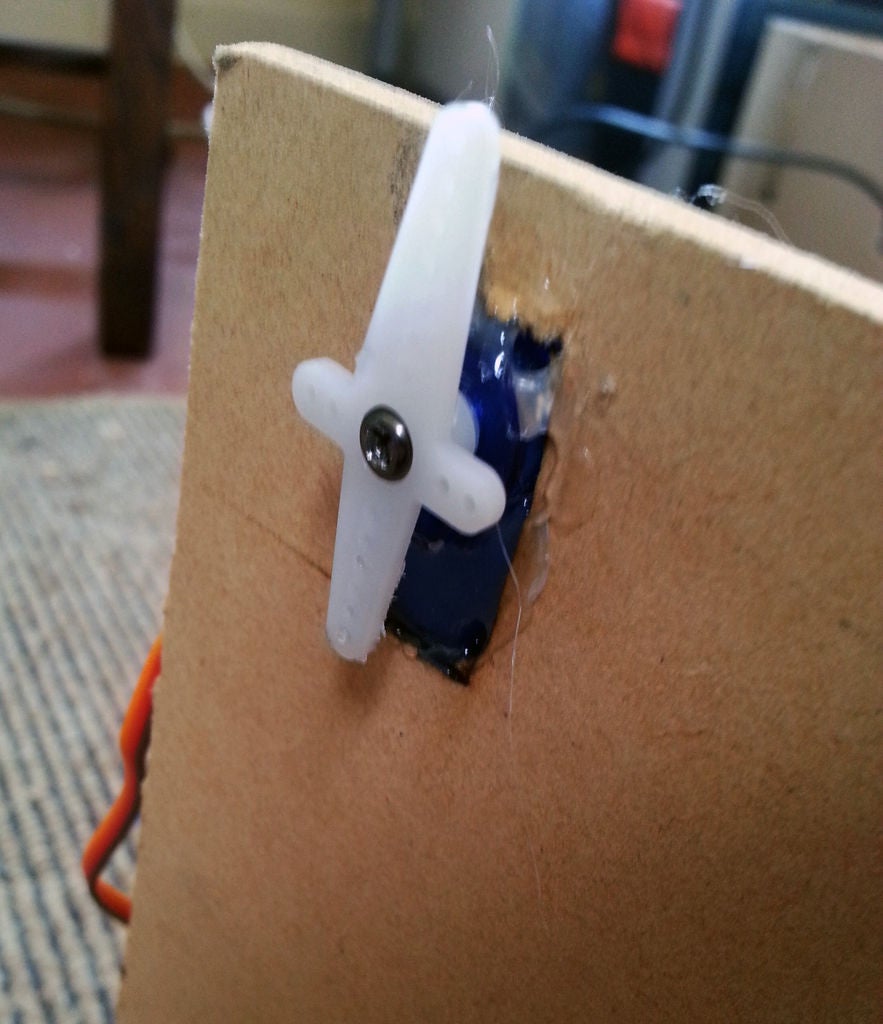
将伺服1的胶粘到孔(B)中,螺丝孔将在内部
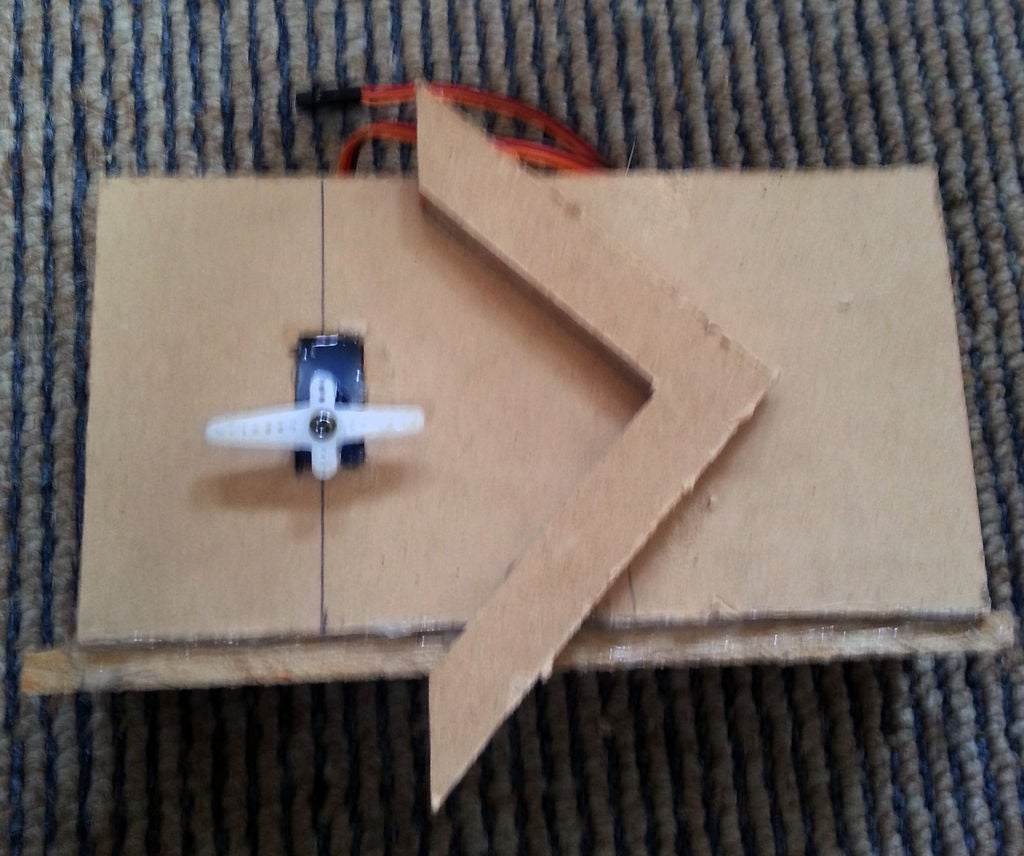
将顶部的胶粘在底座上
将旋转的板F,G,H粘在一起(在H部看到的缺口在图片中看不到,因为后来添加到了让更多的光线进入右侧的光电晶体管),确保已从H片上切出伺服孔(使用旋转工具)。
将伺服2胶粘到切成H的孔中。
将相机支架(手机支架)I,J,K,L,M,N,O粘合在一起。 N和O分别放在M和I的背面,以将手机固定在适当的位置(如图所示)。
将箭头形的转子导向器粘在B片和H片上。箭头指向B片的末端40mm,H片的底部60mm(如图所示) 。
将一个伺服臂拧到每个伺服器上。确保长度方向处于整个运动范围的中间。
将伺服1的手臂粘在板G上,将伺服2的手臂粘在I板上
相机安装完成!
步骤3:跟踪系统




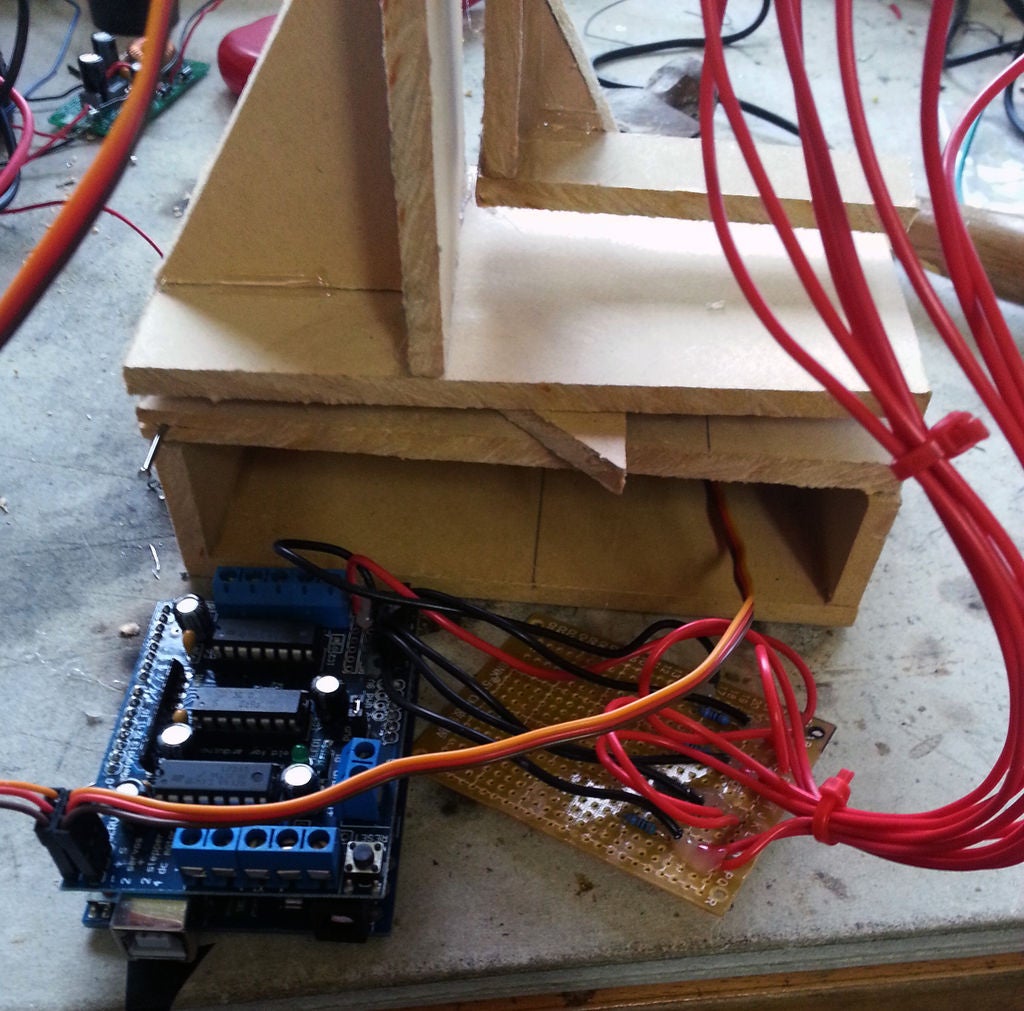


用于跟踪系统非常简单,因为大部分工作是由Arduino模块和Adafruit电机护罩完成的。
方法
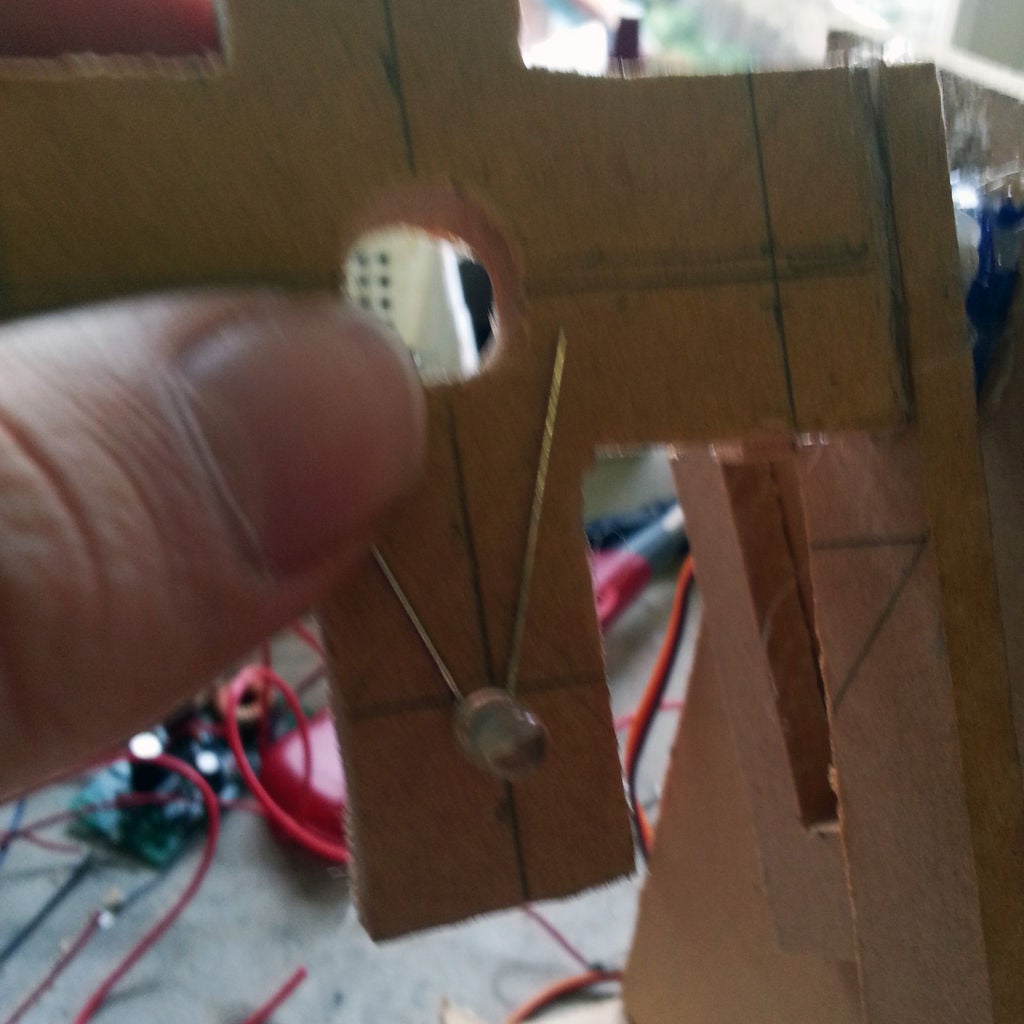
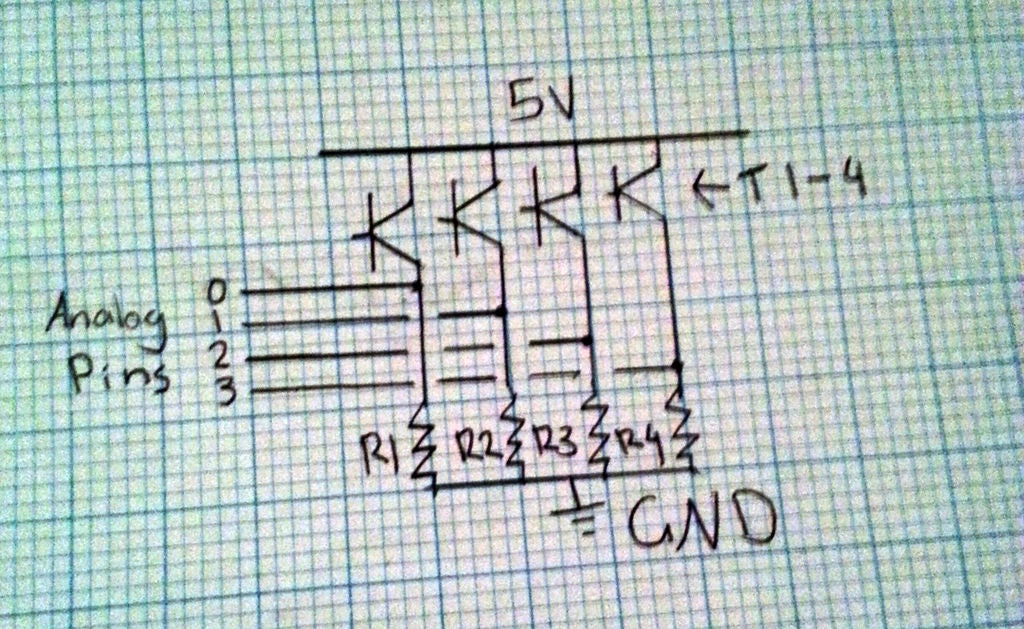
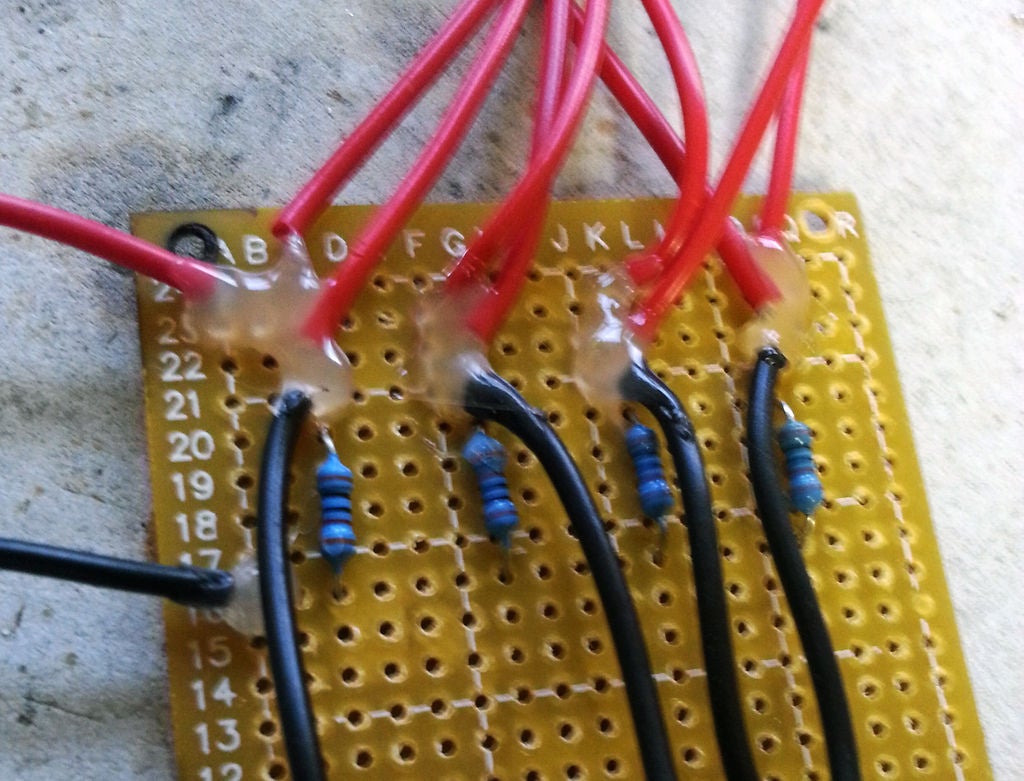
1。标记出K片上的光电晶体管(PT)的斑点。在上臂和下臂上,将(PT)粘到两端20mm处,并粘到每侧10mm处,在侧面臂上,它们将粘到两端10mm和15mm处。从侧面看。结果2。将PT的引线弯曲成形状。顶部和左侧PT的引线将在边缘上弯曲,底部和右侧PT的引线将向外弯曲。结果3。将400mm导线之一焊接到每条PT引线4上。将每个PT胶粘到K上的适当位置。确保侧臂上PT的导线都朝左,上臂和下臂上PT的导线都朝上5。接下来,将PCB焊接在一起(请参阅原理图)。结果6。焊接R1-4(10k欧姆电阻器)将全部4的一端连接到一个公共节点(这将是GND)
7。焊接PT T1-4。 PT的布局是; T1 =底部PT,T2 =顶部PT,T3 =右侧PT,T4 =左侧PT。焊接PT时,请确保将发射极侧(短引线)连接到电阻器,将集电极(长引线)连接到所有其他PT的公共节点(这将是5v电源轨)。结果8。在所有PT的发射极引脚上焊接100mm的导线,该导线将连接到Adafruit电机的屏蔽层。结果9。在5v导轨(红色)和GND(黑色)处焊接一条150mm的导线,该导线也将连接到Adafruit电机的屏蔽层。结果10。将100毫米电线(从PT上模拟读取-电阻两端的电压将与光强度成比例)焊接到Adafruit电机屏蔽罩上的原型模拟引脚空间,并确保它们的顺序正确(T1 = A0等)。结果11。将5v和GND导线焊接到Adafruit电机屏蔽层(这两个都有一个原型导轨)。结果12。将所有电线热粘到各自的PCB板上,以防止它们被扯出。
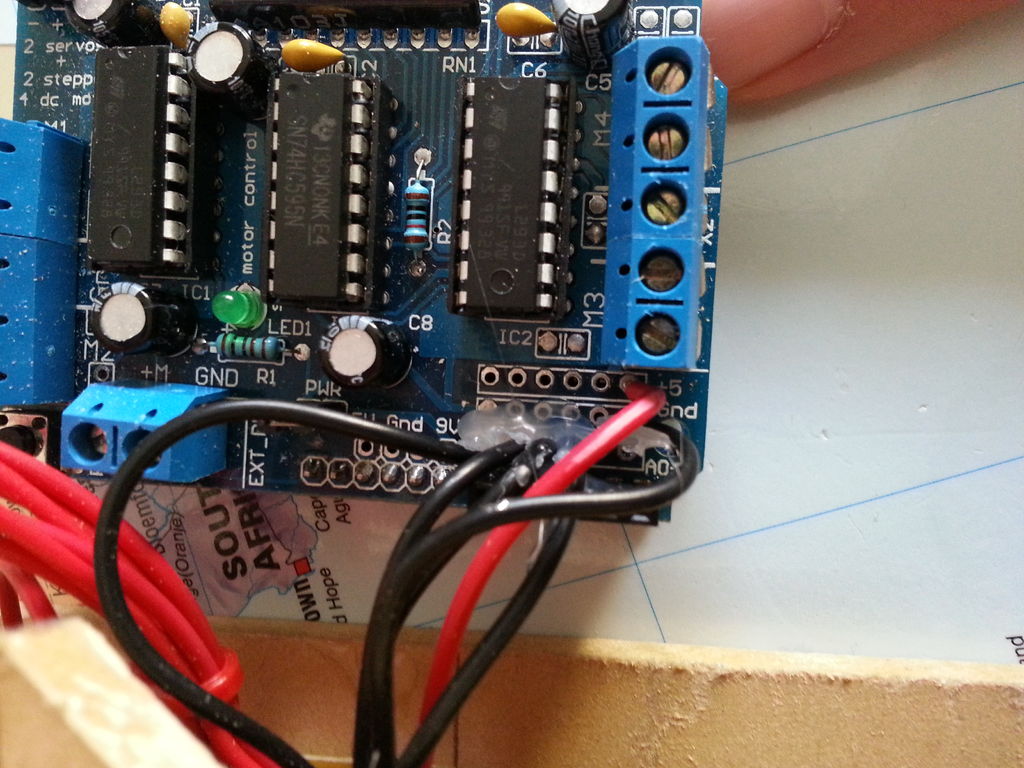
13。将伺服器连接到Adafruit电机屏蔽的伺服端子引脚,将伺服2接到引脚1,将伺服1接到引脚2。
14。电缆扎紧PT电线以防止安装架移动时缠结,首先将电缆扎紧线对,然后将所有电线捆扎在一起。结果15。将所有电子设备放到底座中,并用热胶固定。
跟踪系统完成!
第4步:跟踪系统代码
该代码才是真正的使设备工作。它从每个PT读取100个值的数组,并确定是否存在200Hz脉冲信号。然后,它移动两个伺服器以跟随脉冲红外光源。
有关信号检测代码的更多信息,请访问我的其他Instructionable Arduino IR信号检测器
下面提供了跟踪代码IR_flash_director。
IR_reader代码仅打印出每个PT的原始值,我发现这些值在测试时很有用
第5步:红外信号源
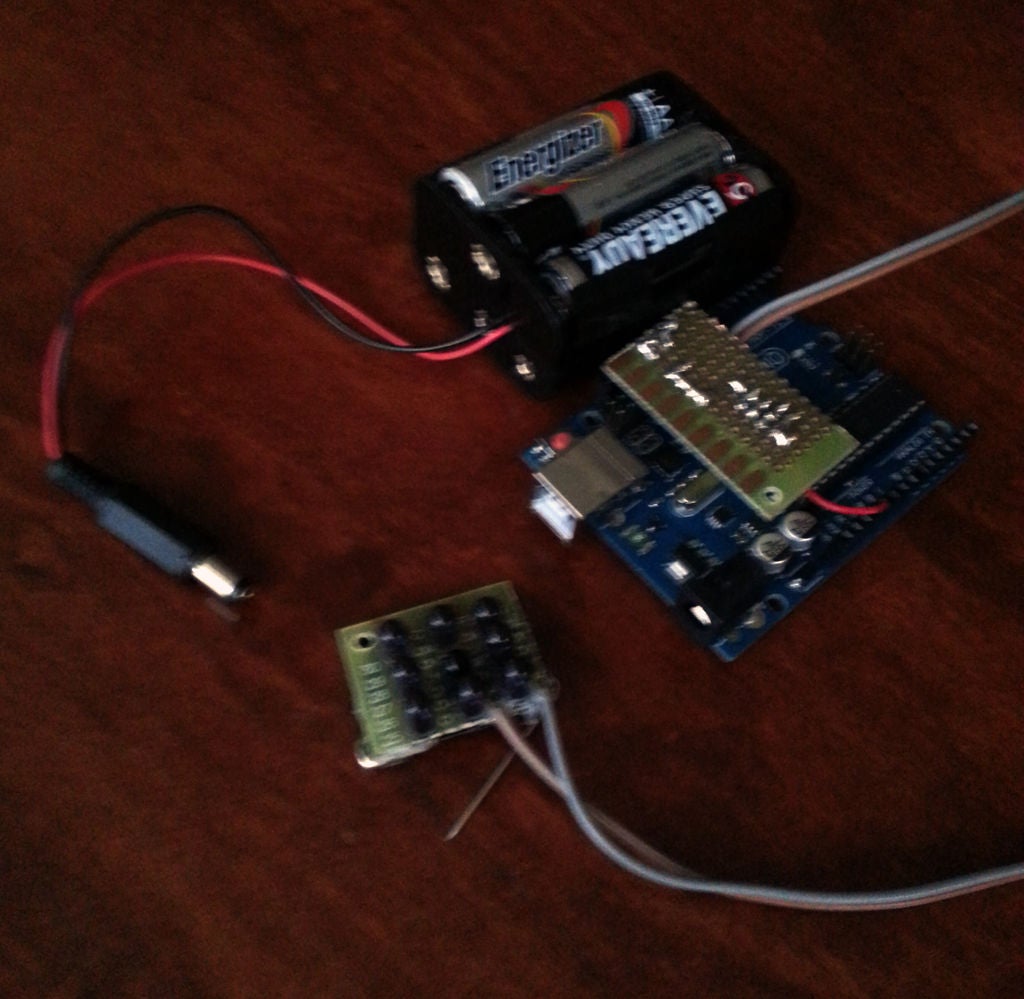









尽管您可以使用Arduino Uno使用此设备来产生200Hz的脉冲IR信号, 555计时器。
方法
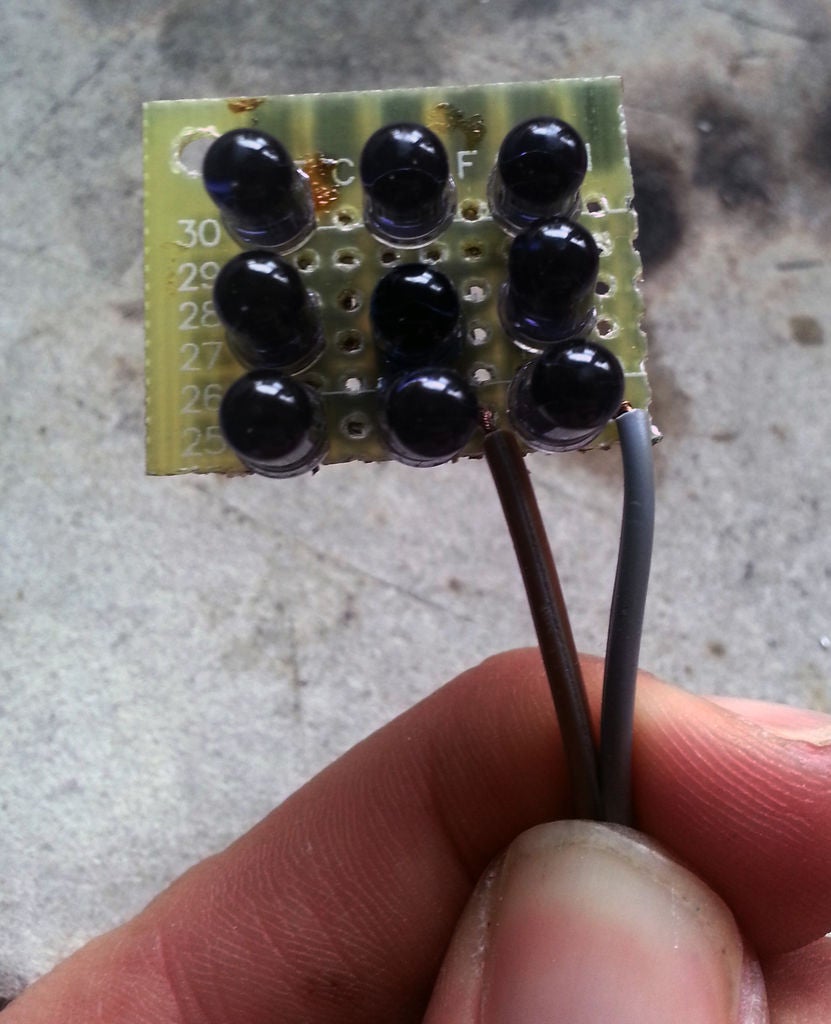
LED板
1。从较大的原型板(25x30mm)切出一块小的PCB板。
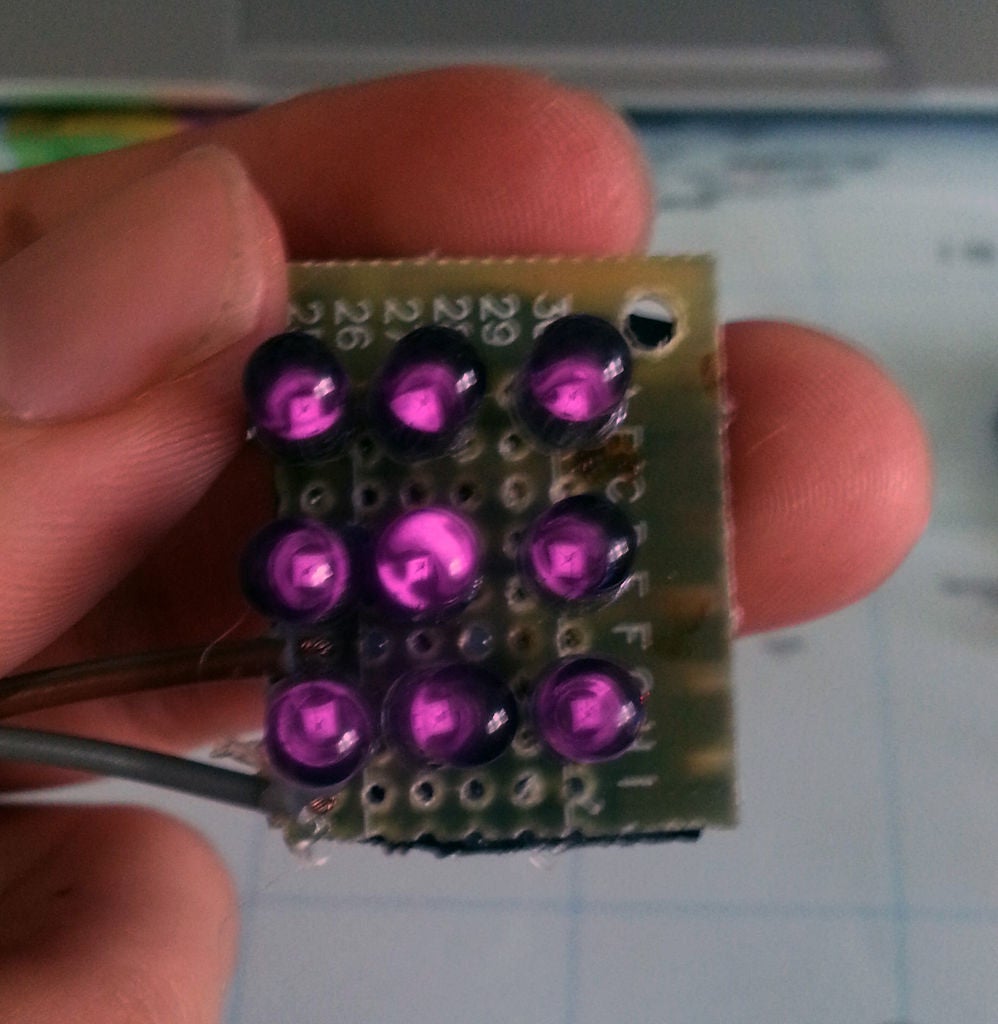
2。按照图中所示的布局将9个LED阵列焊接到较小的PCB板上,并确保将两个正极和两个负极与连接线焊接在一起。结果3。将两根750mm长的连接线焊接到LED板上,一根用于正极,一根用于负极(我使用了双股AV线)。热胶丝就位。结果4。将40mm长的热缩管(按一定长度切割)热粘到LED板的背面。这将阻止安全销使LED短路。结果5。在您焊接750mm正极和负极电线的另一侧,热熔安全销。安全销是用于将LED固定到自己的安全销。结果6。现在LED板已通过照相机完成测试,您应该看到LED发出紫色光。
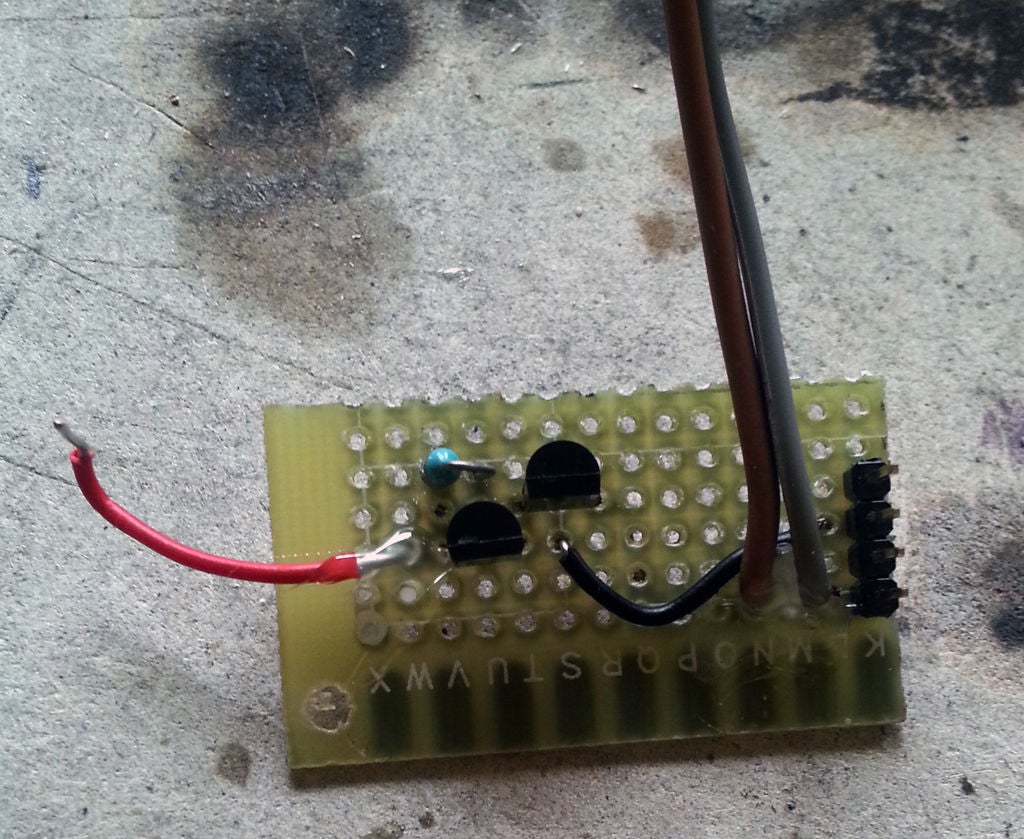
Mini Amp
此放大器是必需的,因为I/O引脚的输出不足以为所有9个模块供电LED的数量。
1。从较大的原型板(25mmx40mm)中切出一块小的PCB板。
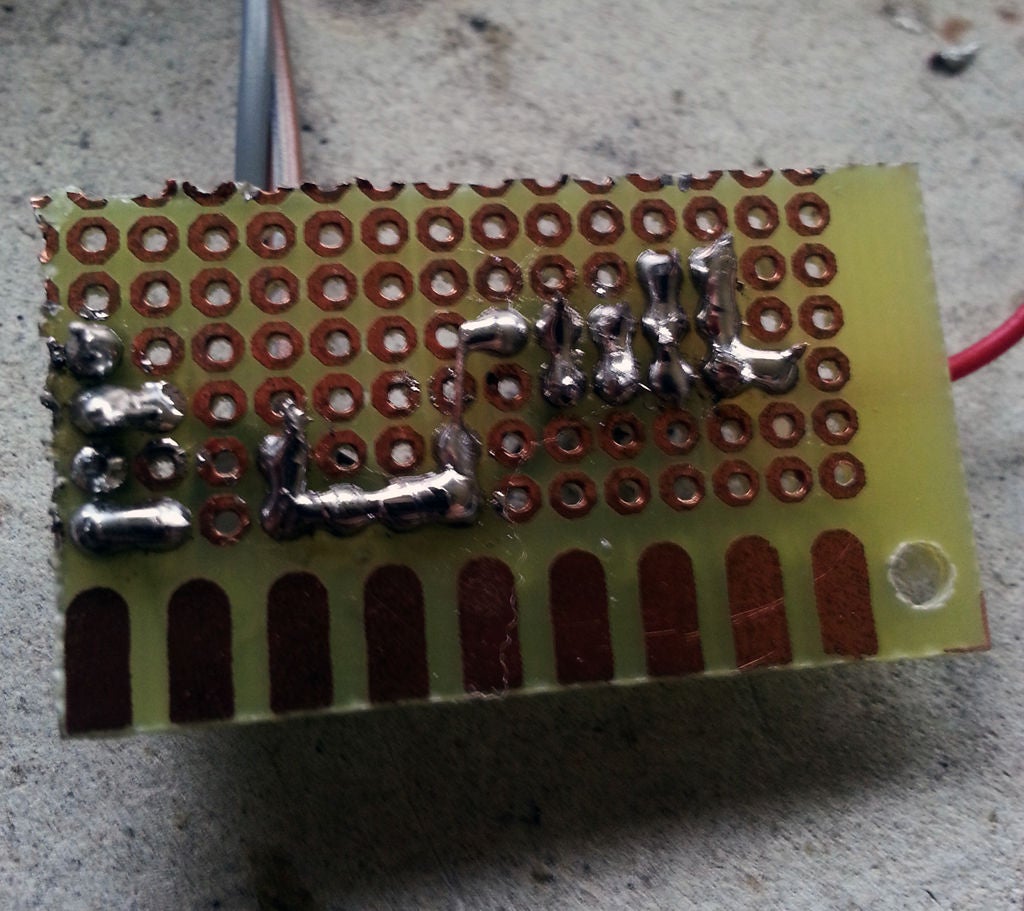
2。按照原理图,从4引脚端子开始,将零件焊接到PCB上。此放大器板旨在直接连接到Arduino Uno,第一个引脚将连接到数字引脚侧的GND。结果3。接下来,将两个BC547晶体管焊接在一起,将T1的发射极焊接到T2的集电极。这些级联的晶体管将大大放大脉冲信号。结果4。在T1
5的集电极和基极之间焊接400Ω电阻器。将正极线从LED板焊接到T2的发射极,将负极线焊接到GND端子引脚
6。使用链接将T2的基座连接到第3个端子引脚(第2个和第4个端子引脚仅在此处提供支撑)。结果7。焊接来自T1收集器的另一个链接,使其悬空,这将连接到Arduino的5v引脚。结果8。将电路板上下颠倒,然后将其连接至Arduino Uno,切记将GND引脚连接至Arduino的GND引脚,并将5v导线连接至Arduino的5v引脚。结果9。将2.5mm直流电源插座焊接到6x1.5 AA电池组上,这将为Arduino提供9v电源(比9v电池的使用寿命更长)。
信号源完成!
第6步:IR信号代码

该代码仅每5mS对引脚12施加250uS脉冲,产生200Hz信号,该代码,“ flashing_ir”在下面可用。
一旦上传到Arduino Uno上,您就可以使用“ Flash_det”代码和跟踪系统来测试是否正在生成信号,如果检测到信号,Flash_det代码将简单地输出负值。
第7步:最终测试

如视频(视图1和视图2)所示,该设备有点慢又笨重,但这只是第一个原型,我对此感到非常满意!它能够检测到大约3-4米远的红外信号,并忽略了设计中的其他光源(例如,我房间里的灯光)。
我将大部分笨拙/缓慢的运动归结为小伺服系统必须在下一个设计中进行升级(特别是如果使用更大的摄像头)。
此设备只是信号跟踪系统的一个应用,该系统最初是为引导四轴飞行器而设计的(但从未实施)。登陆,尽管我看到了很多应用程序。
责任编辑:wv
-
信号源
+关注
关注
5文章
477浏览量
44417 -
支架
+关注
关注
0文章
22浏览量
10030
发布评论请先 登录
相关推荐
为什么DAC5674在external 2×的情况下datarange在直流到200HZ之间?
ADS1298EVM板采集200Hz信号失真
AI智能识别监测摄像机

AI图像识别摄像机
100Hz跟踪难实现? 慧视定制RK3588轻松破局


LM3886输入发送扫频信号,扫频信号到200Hz左右会出现震荡,为什么?
车辆冲洗监测摄像机

防跌倒识别摄像机
水位自动识别摄像机

客流量监测识别摄像机

基坑监测识别摄像机






 工商网监
工商网监
评论