 六脚机器人的制作教程
六脚机器人的制作教程
步骤1:购物时间
您需要购买的所有组件:
32 CH伺服控制器
Wemos D1 Mini
Servo伺服塔式Pro 9g
5v Ubec 6A最小
母头-杜邦母头跳线
步骤2:打印并组装身体部位
所有蜘蛛身体部位和爪子都可以从
https://www.myminifactory.com/下载object/3d-print-7650 。..
或
https://www.thingiverse.com/thing:3130196
强制性列表u部分必须打印:
6x shield.stl
3x coxa_A.stl
3x coxa_B.stl
3x tibia_A.stl
3x tibia_B.stl
3x femur_A.stl
3x femur_B.stl
1x Hex_body_short.stl
1x Hex_cover_short.stl
1x Ring.stl
其余为可选。..
Step 3:连接点
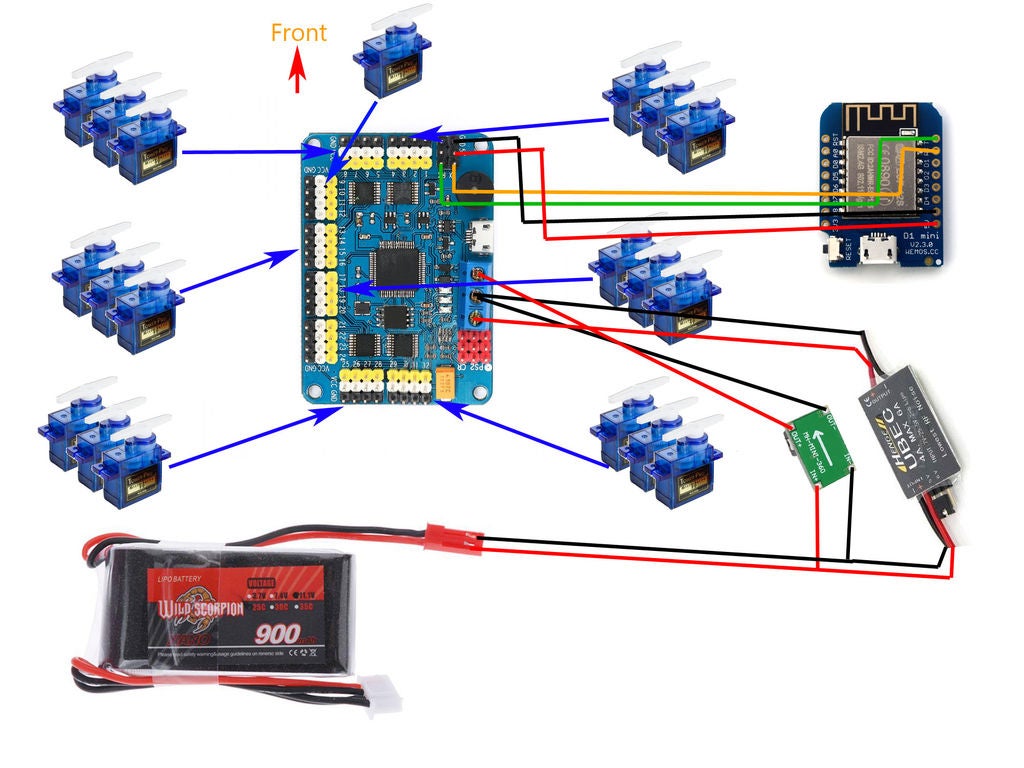
这都是电子原理图,基本上所有由32CH伺服控制器控制的伺服器都已经内置微控制器。就像arduino一样,它是独立的,可以使用来自PS2控制器,PC或其他设备的串行命令进行控制。
步骤4:32CH伺服控制器
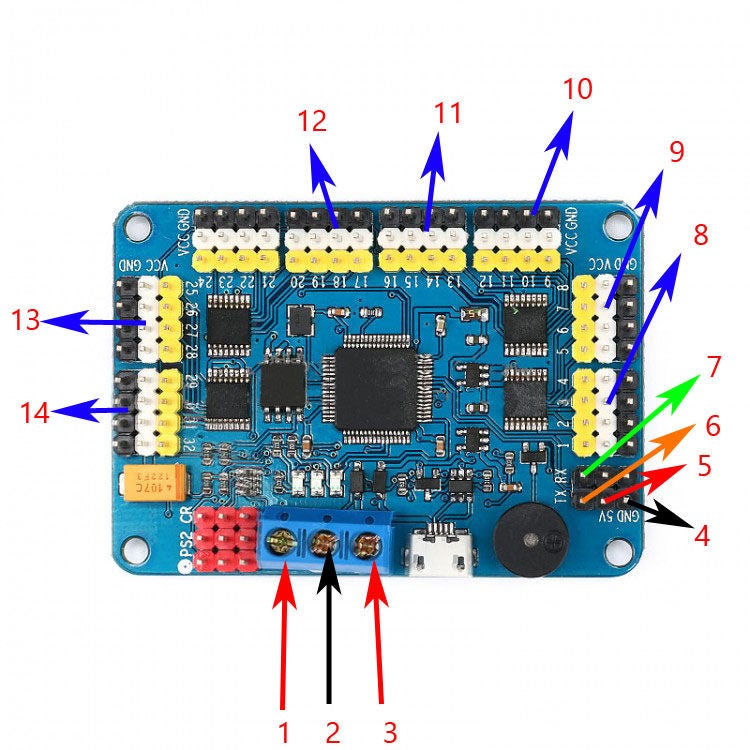
特征:
工作电压:5v
伺服电机输入电压:4.2V〜7.2V
CPU:32位
波特率(USB):115200
波特率(蓝牙/UART):4800,9600、19200、38400、57600,115200
闪存容量:16M
红色指示灯:CPU电源指示灯
Gree指示灯:伺服电机指示灯
黄色指示灯:PS2无线控制器
模式协议:UART
计算机协议:支持单个
操作协议:支持
模式类型:USB/UART/离线独立/PS2无线控制
布线映射:
5v电源(+)
UBEC的接地和Mini Stepdown
5v电源从迷你降压
到Wemos D1迷你G引脚
到Wemos D1迷你5v引脚
到将Wemos D1迷你RX引脚
连接到Wemos D1迷你TX引脚
(使引脚颜色与伺服电缆颜色匹配)到右前腿(引脚1到coxa,针脚2到股骨,针脚3胫骨伺服)
(将针脚颜色与伺服电缆颜色匹配)到左前腿(针脚5到coxa ,针脚6到股骨,针脚7胫骨伺服器)
(使针脚颜色与伺服电缆颜色匹配)针脚9到爪形伺服器(首先组装爪形)
(将针脚的颜色与伺服电缆的颜色匹配)到左中腿(针脚13到coxa,针脚14到股骨,针脚15胫骨伺服)
(将针脚的颜色与伺服电缆的颜色匹配)到右中腿(针脚17到coxa,针脚18到股骨,针脚19胫骨伺服) )
(将针脚颜色与伺服电缆的颜色匹配)到左后腿(针脚25到c oxa,针脚26到股骨,针脚27胫骨伺服)
(将针脚颜色与伺服电缆颜色匹配)到右后腿(针脚29到coxa,第30针到股骨,第31针胫骨伺服器)
第5步:NodeMCU AP
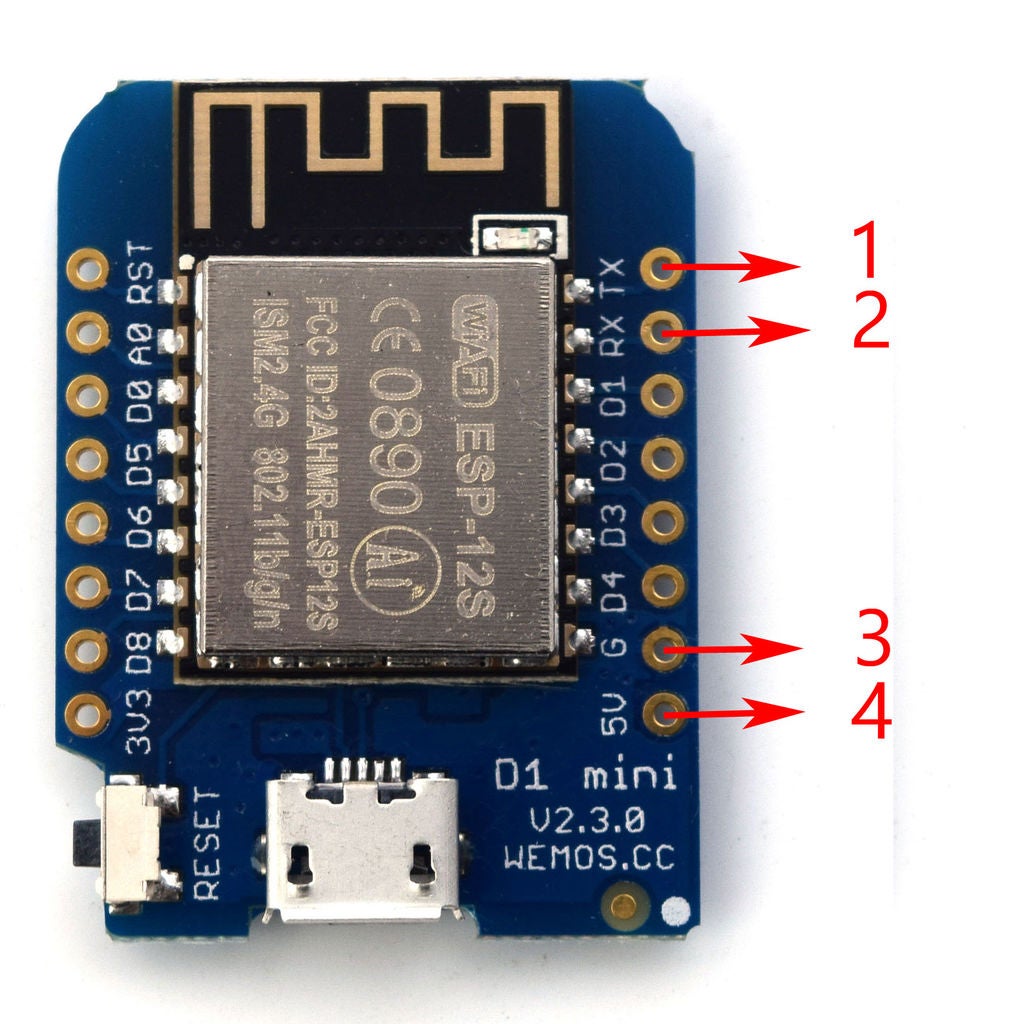
WeMos D1 mini是最小的ESP8266 wifi板
使用wemos D1 mini作为WIFI AP,我们可以向32 CH伺服控制器发送串行命令,并独立成为用于控制机器人的Web服务器AP。
我们所需要的只是用代码附件刷新nodeMCU板,就可以将智能手机连接到nodeMCU AP,并使用Web浏览器打开http://192.168.4.1,我们可以看到所有命令。
ModeMCU引脚映射:
到32 CH伺服控制器RX引脚
到32 CH伺服控制器TX引脚
从32 CH伺服控制器5v引脚
PS的32 CH伺服控制器G引脚
PS:我已修复(2019年3月4日更新)之前出现的一些连接问题。..例如难以连接或页面无法显示完全渲染。..并且如果您有很多错误动作,请检查您的电池电流。..通常是因为它没有足够的电池电量运行。..
所以,玩得开心。..! :)
第6步:初始姿势
重要。.. !!
我们需要设置蜘蛛的初始姿势。
打开机器人的电源(也许是第一次使用所有腿都将成为姿势,因此,在此步骤中,请先释放所有伺服喇叭)
重新安装伺服喇叭并调整古柯,胫骨和股骨的姿势,就像上图
关闭并重新打开,以确保所有腿部都处于正确位置
步骤7:添加更多运动
完成后,我们可以向arduino代码添加更多运动。我使用RTrobot伺服控制器进行一些移动,并在获得伺服的串行命令后,可以通过一些代码调整将其放入代码中。
在此处下载
或这里@ 4shared仅适用于Windows和Linux
PS非常非常重要:
从Wemos和伺服驱动器接收和接收的所有RX和TX必须牢固连接,因为循环例程始终从32个伺服驱动器中检查“确定响应” 。如果找不到伺服驱动器并且没有“确定” 响应,则程序将在“ void wait_serial_return_ok()”中循环
此错误将导致:-无法连接到AP-空白网页-页面加载进度未完成
步骤8:汇总。..
对于电源,我们也可以使用lipo 3s电池,我认为900mah足够了,但是您需要有lipo电池来充电。
如果要放置障碍传感器和伺服器,可以将传感器连接到wemos d1迷你输入引脚之一,并通过32 CH伺服控制器G和5V供电
步骤9:对于谁在打开网页或连接到AP时遇到问题
我已解决此问题,请重新从步骤中下载它5以上(修复@ 31-4-2019)
某些Wemos D1 mini克隆的ESP不好或有缺陷,导致:
-难以连接到AP
-无法打开页面
-加载未完成
步骤10:电缆整理。..
责任编辑:wv
-
机器人
+关注
关注
212文章
28910浏览量
209654
发布评论请先 登录
相关推荐
开源项目!基于Arduino控制的六足机器人
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
焊接机器人六个轴分别是什么作用

如何正确操作六轴焊接机器人
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
六维力传感器——人形机器人的力觉

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
六轴焊接机器人的操作流程






 工商网监
工商网监
评论