 ARDUINO蜘蛛机器人DIY图解
ARDUINO蜘蛛机器人DIY图解
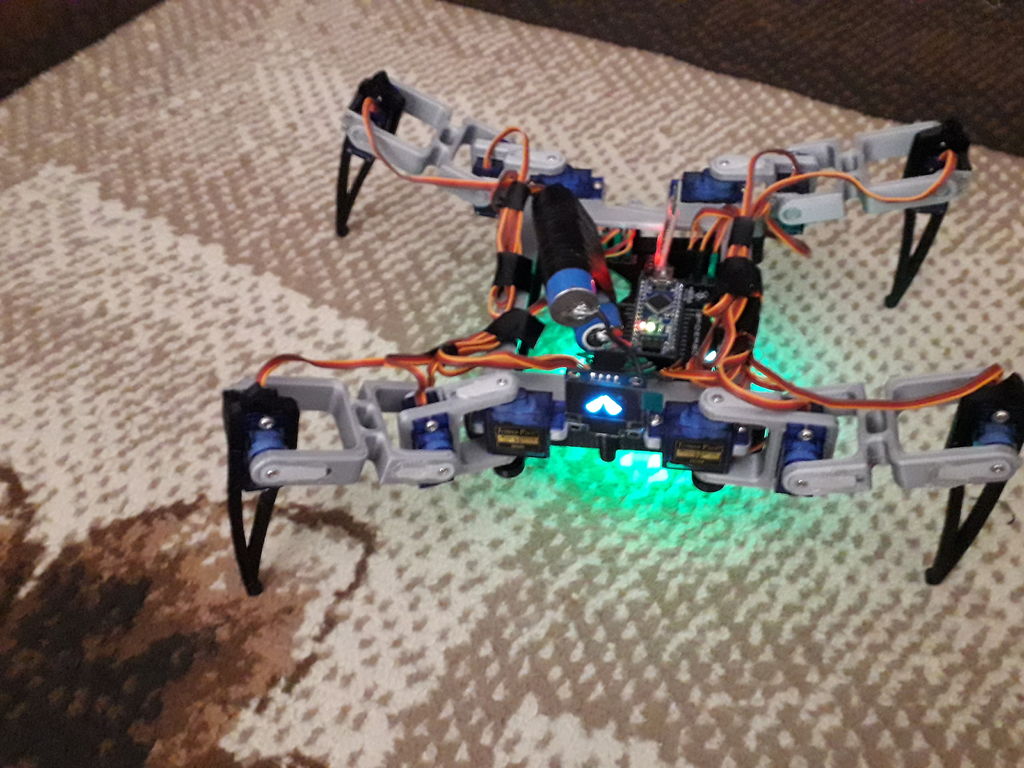
步骤1:什么是“蜘蛛机器人”
正如其名称所定义的那样,我们的机器人是sipder运动的基本表示,但是由于我们只使用四只脚而不是八只脚,因此它不会执行完全相同的身体动作。
也称为 Quadruped 机器人,因为它有四条腿,并使用这些腿进行运动,每条腿的运动与其他腿相关为了识别机器人的身体姿势并控制机器人的身体平衡。
带腿的机器人比带轮的机器人能更好地处理地形,并以各种动物性的方式移动。但是,这使有腿机器人更加复杂,许多制造商也难以接近。此外,制造商为了制造四足的全身而需要花费的制造成本和较高的费用,因为它基于伺服马达或步进马达,并且两者都比可用于轮式机器人的DC马达贵。 p》
优势
您会发现四足动物在自然界中很丰富,因为四条腿可提供被动稳定性,或保持站立而不主动调整位置的能力。机器人也是如此。四腿机器人比腿多的机器人更便宜,更简单,但仍然可以实现稳定性。
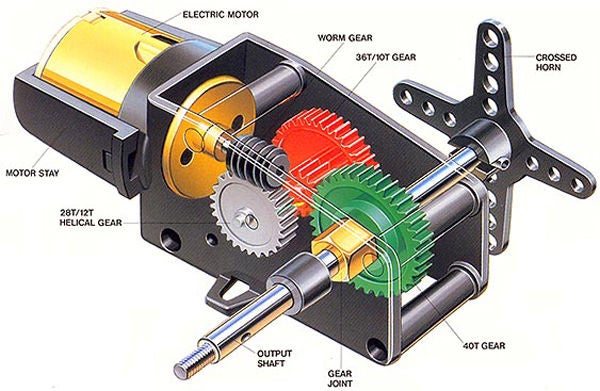
Wikipedia中定义的伺服电机是旋转致动器或线性致动器,可精确控制角度或线性位置,速度和加速度。 [1]它包括一个与传感器耦合的合适电动机,用于位置反馈。它还需要相对复杂的控制器,通常是专门设计用于伺服电机的专用模块。
伺服电机不是特定的电机类别,尽管术语“伺服电机”通常用于表示适用于电机的电机。一个闭环控制系统。
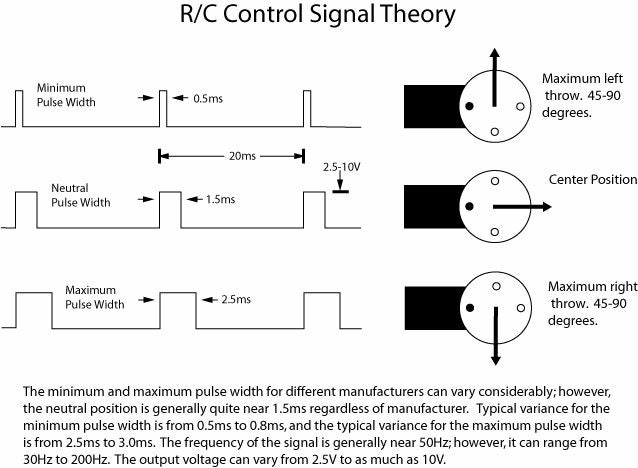
通常来说,控制信号是一个方波脉冲序列。控制信号的常见频率为44Hz,50Hz和400Hz。正脉冲宽度决定了伺服位置。约0.5毫秒的正脉冲宽度将导致伺服喇叭向左偏斜(通常为45至90度,具体取决于所讨论的伺服器)。 2.5ms至3.0ms左右的正脉冲宽度将导致伺服器尽可能向右偏斜。 1.5ms左右的脉冲宽度将导致伺服器将空档位置保持在0度。输出高电压通常介于2.5伏特和10伏特之间(典型值为3V)。输出低压范围为-40mV至0V。
步骤3:PCB制作(由JLCPCB生产)


关于JLCPCB
JLCPCB(深圳佳力创电子科技发展有限公司)是最大的PCB原型企业
JLCPCB拥有10多年的PCB制造经验,在国内外拥有200,000多个客户,其中包括每天在线订购8,000个PCB原型和少量PCB。年生产能力为200,000平方米。适用于各种1层,2层或多层PCB。 JLC是一家专业的PCB制造商,具有大规模,精良的设备,严格的管理和卓越的品质。
返回我们的项目
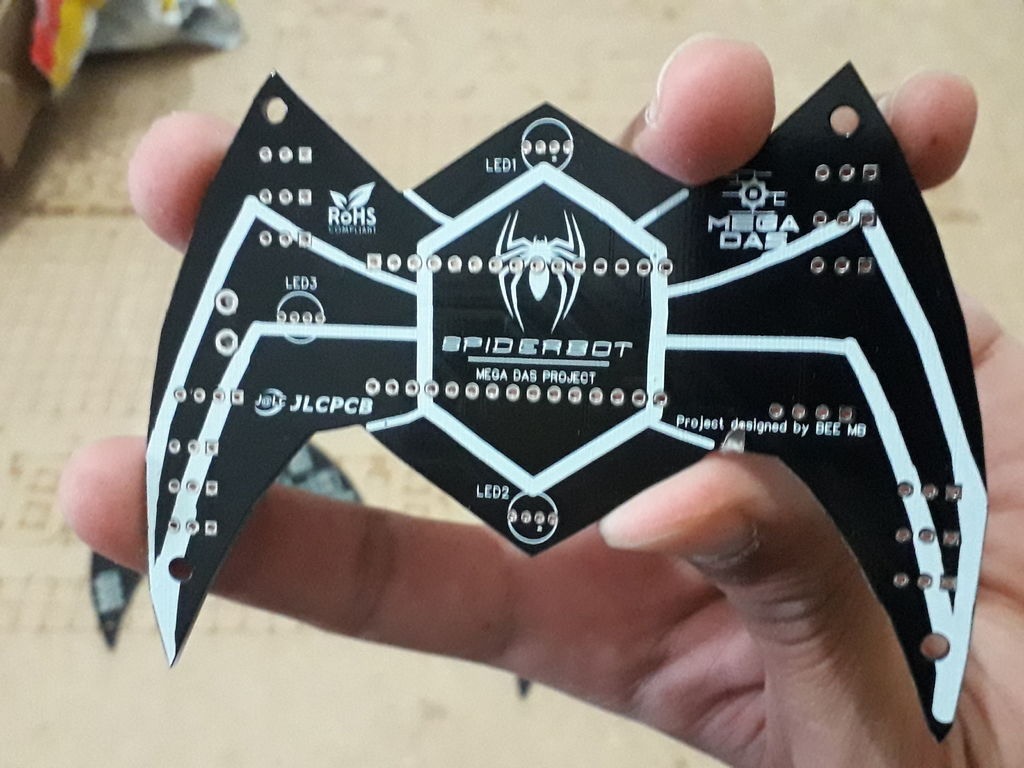
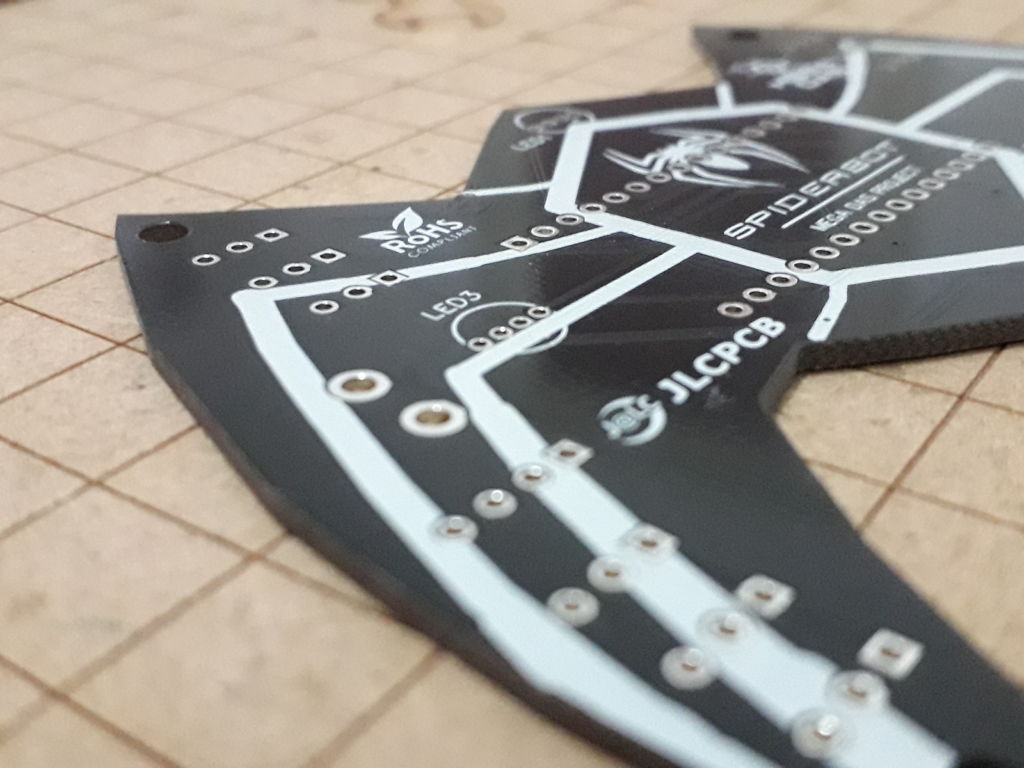
为了生产PCB,我比较了价格我从许多PCB生产商那里选择了JLCPCB,它是最好的PCB供应商和最便宜的PCB供应商来订购该电路。我需要做的只是单击几下即可上传gerber文件并设置一些参数,例如PCB厚度颜色和数量,然后我只花了2美元就可以在5天后买到我的PCB。
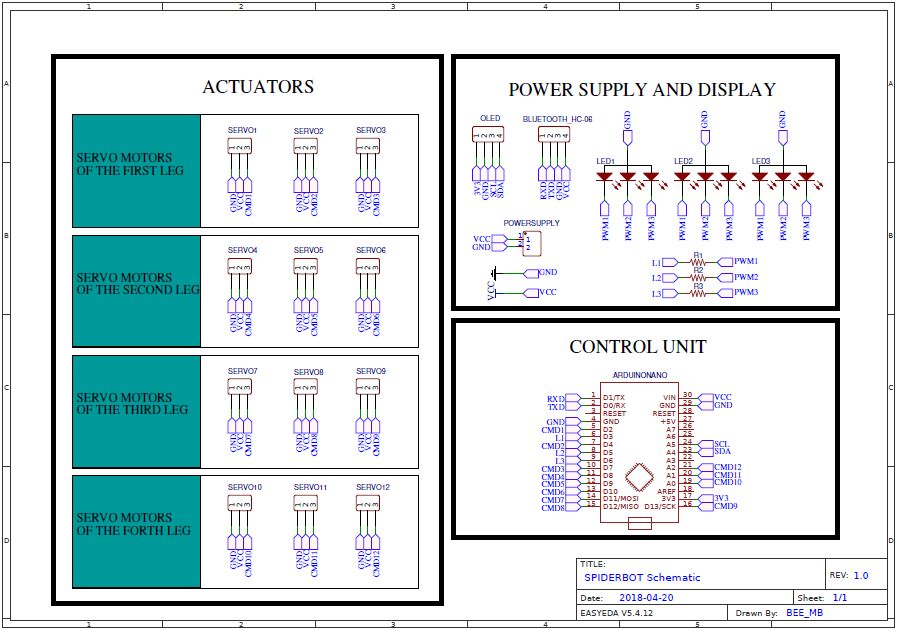
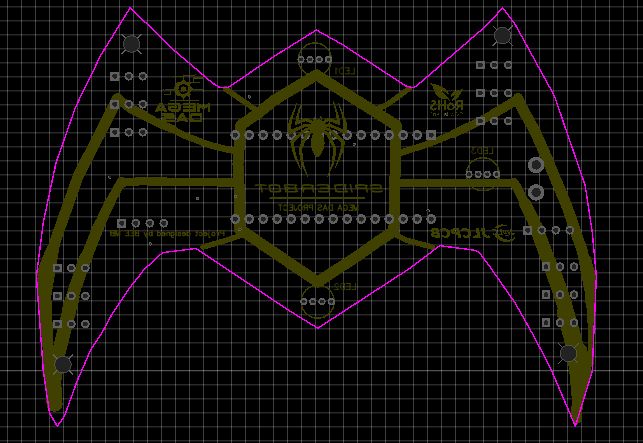
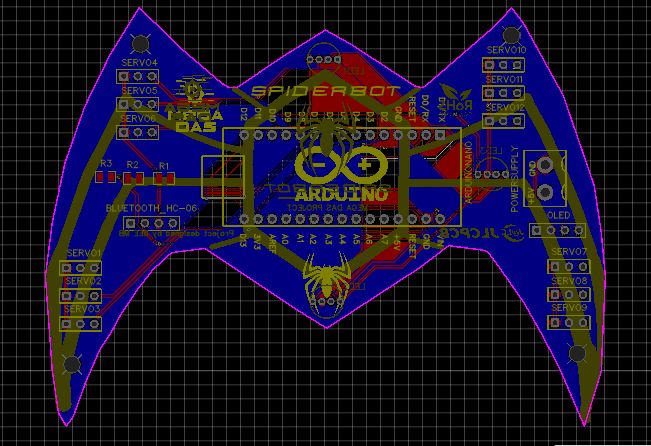
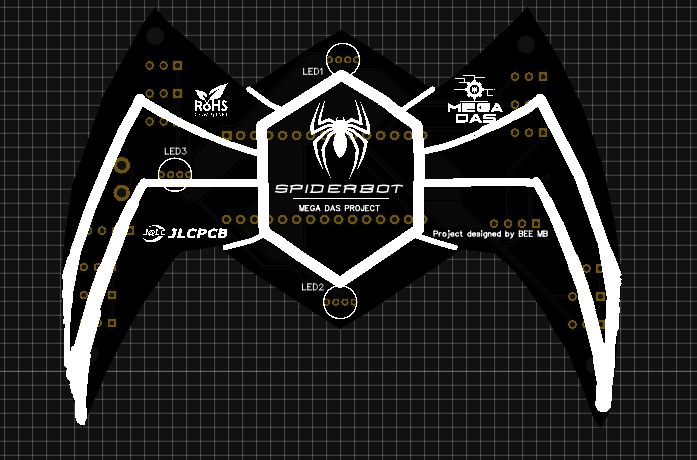
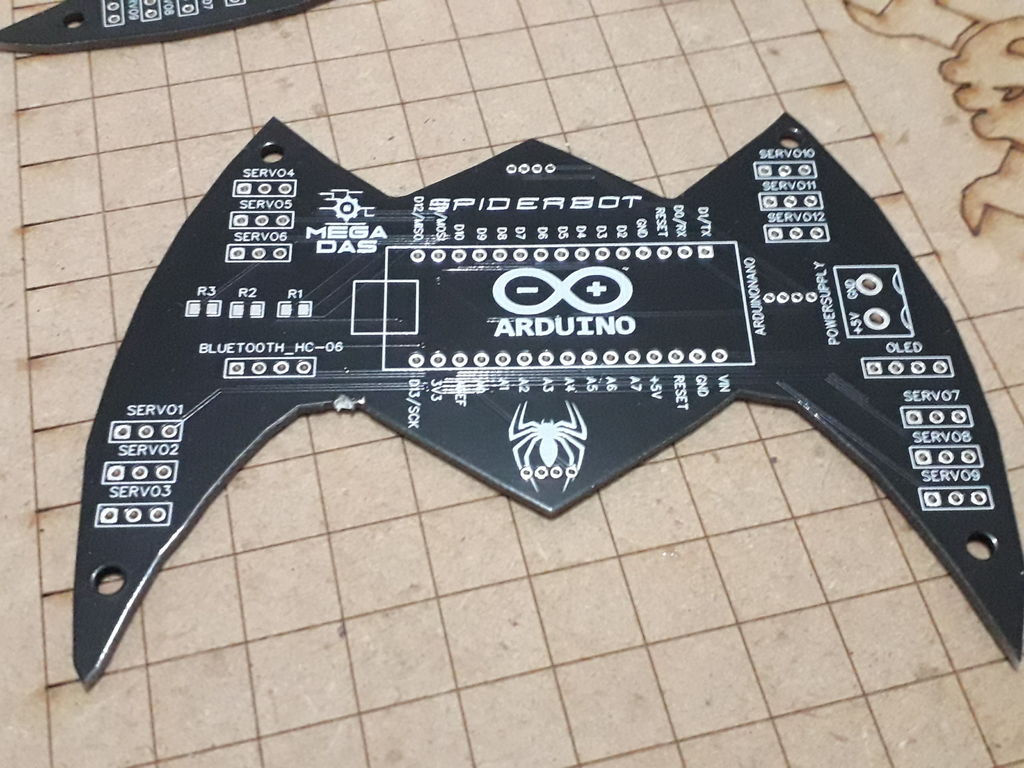
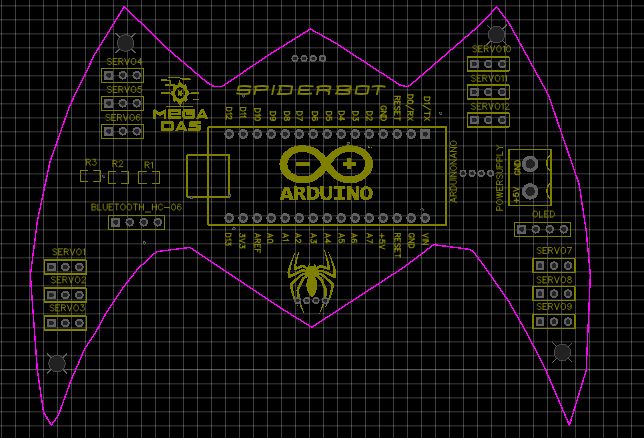
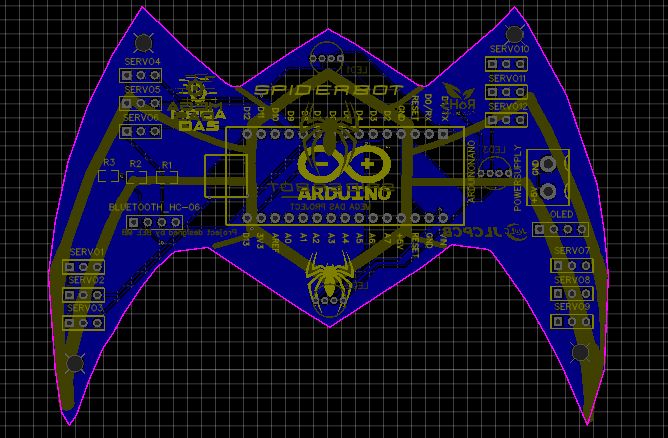
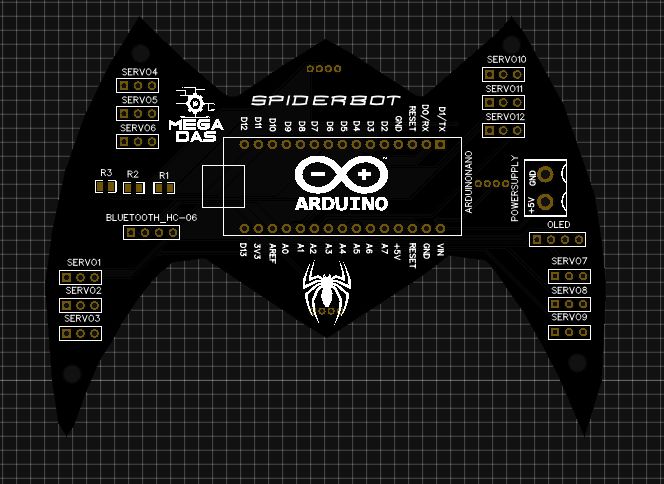
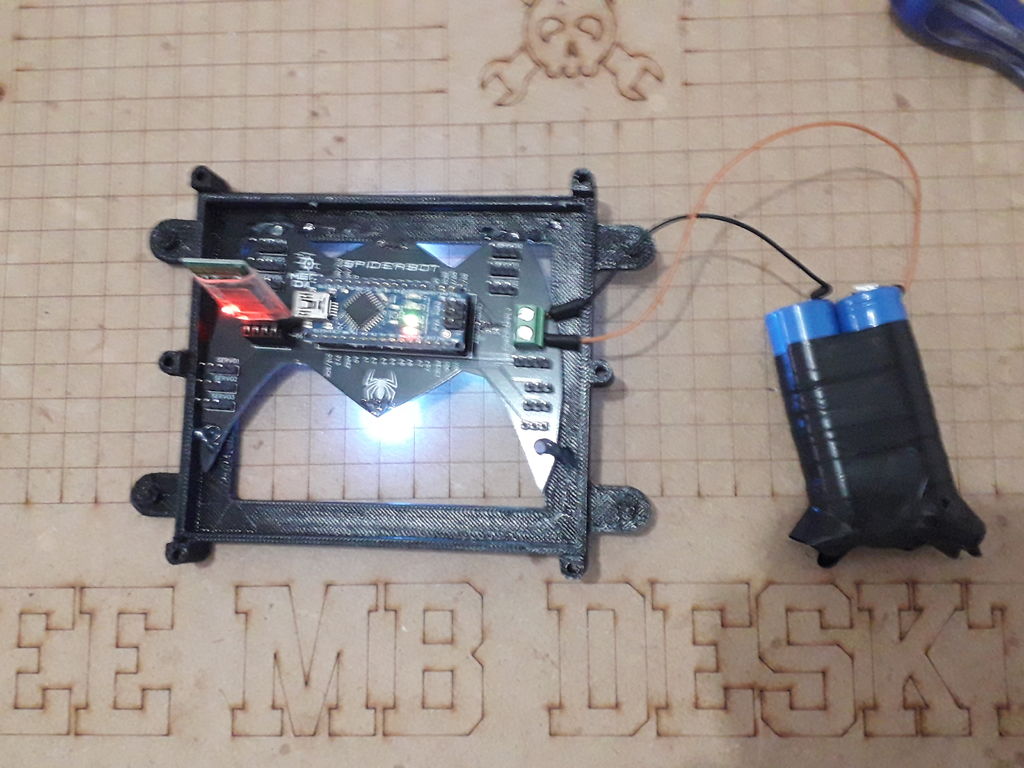
因为它显示了相关方案的图片,所以我使用了Arduino Nano来控制整个系统,还设计了机器人蜘蛛形状来使这个项目更好。
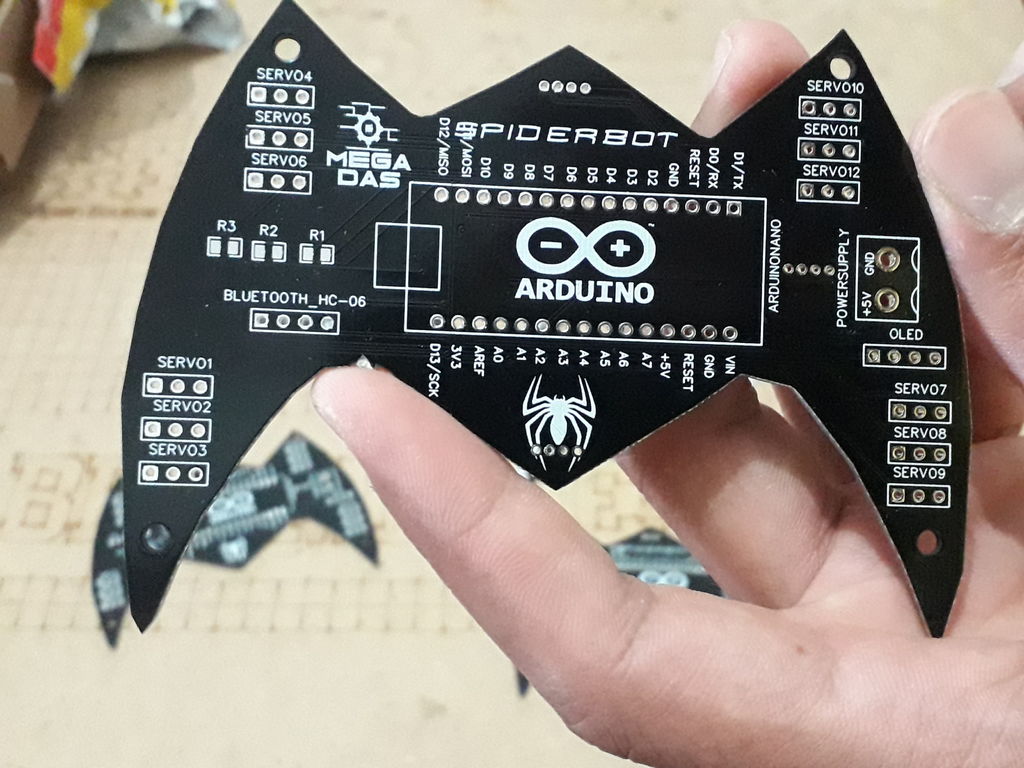
您可以得到电路(PDF)文件从这里。如您在上面的图片中所见,PCB的制造工艺非常好,并且我拥有与设计相同的PCB蜘蛛形状,并且所有的标签和徽标都可以在焊接步骤中为我提供指导。
如果您要订购同一电路设计的订单,也可以从此处下载此电路的Gerber文件。
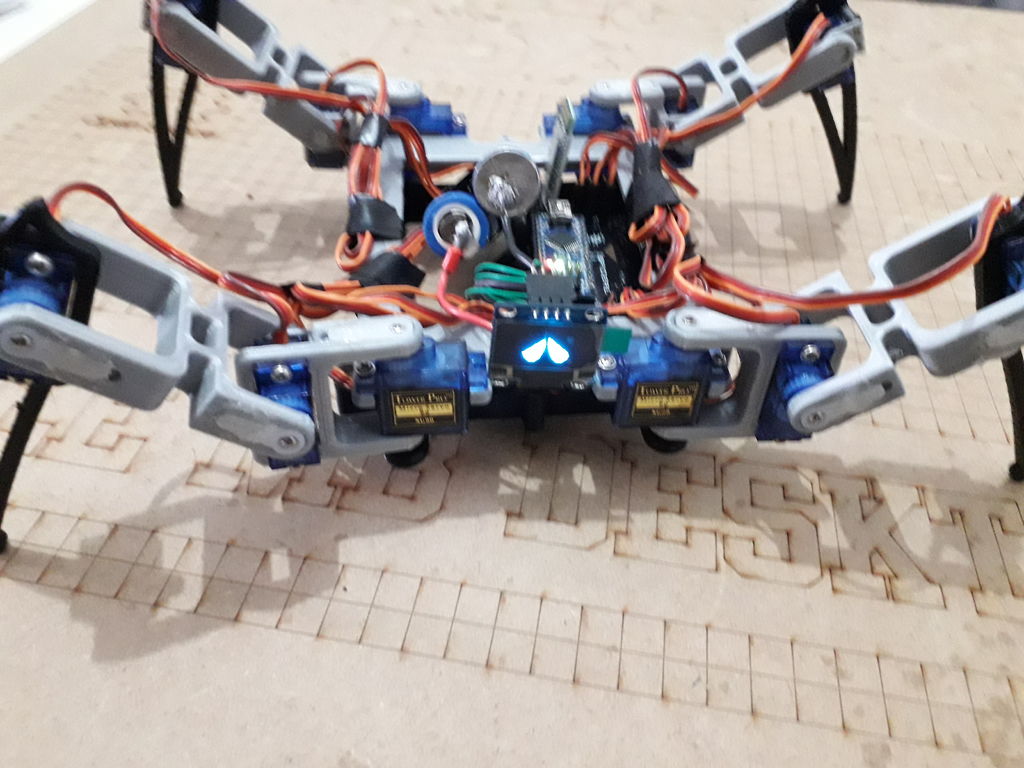
步骤4:配料
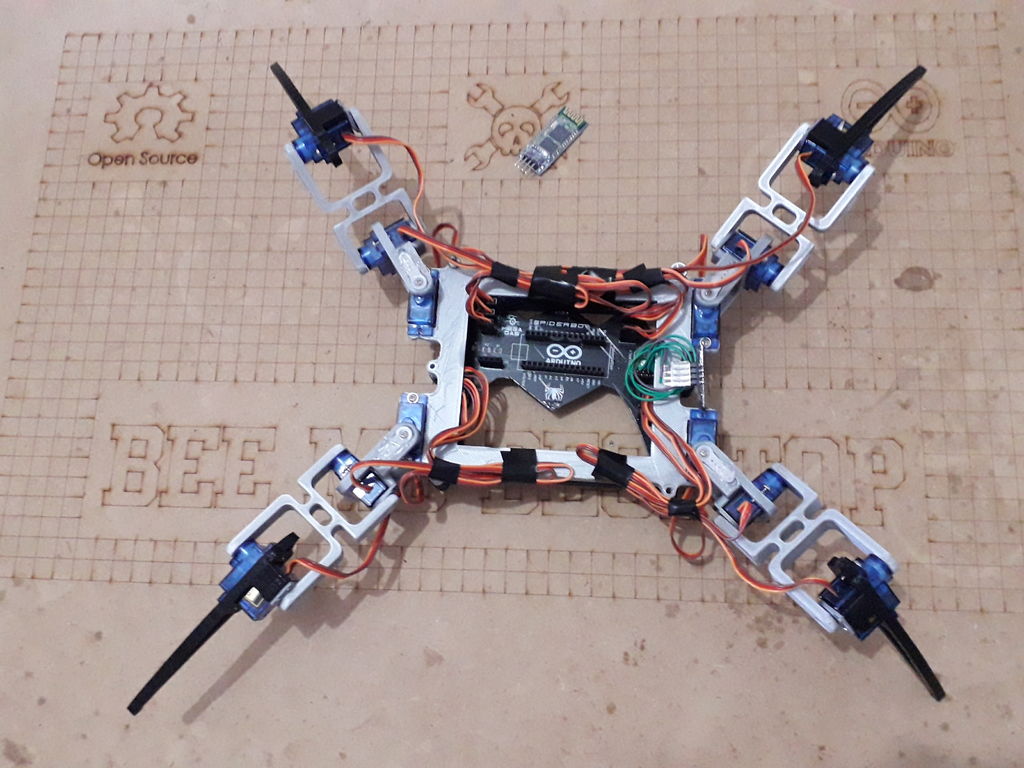
现在让我们回顾一下该项目所需的必要组件,因此我我已经说过,我正在使用Arduino Nano来运行机器人的所有12个伺服电机的四个腿。该项目还包括一个可显示Cozmo人脸的OLED显示屏和一个通过Android应用程序控制机器人的蓝牙模块。
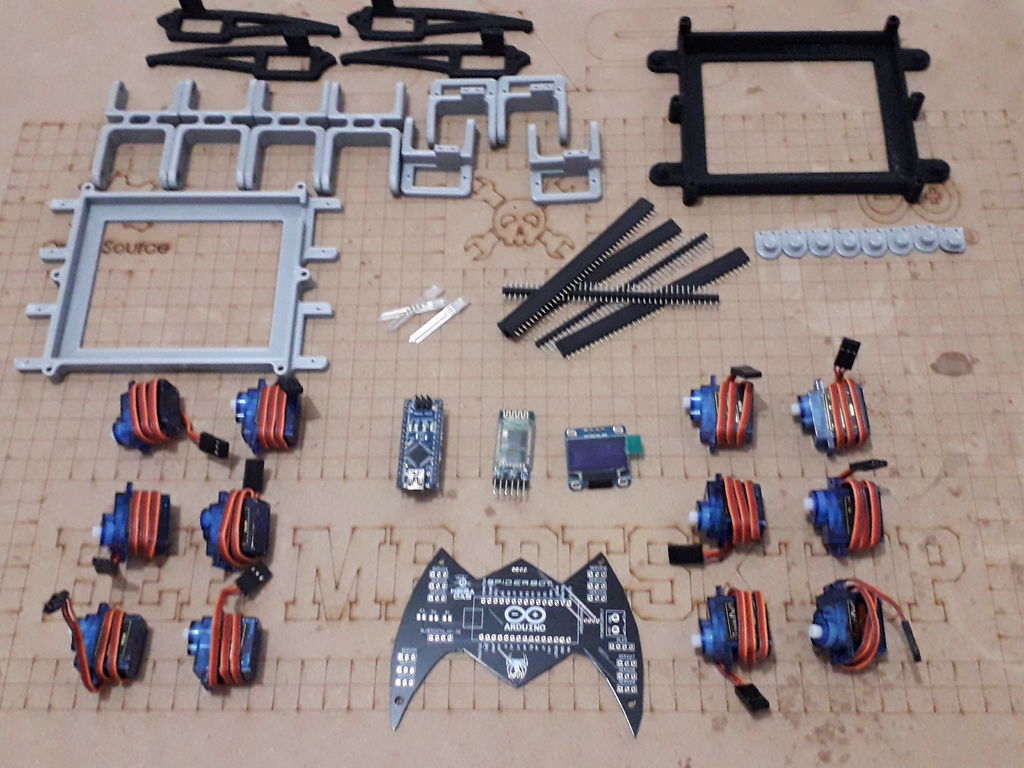
要创建此类项目,我们将需要:
-我们已从JLCPCB订购的PCB
-12台伺服电机,您记得每条腿有3个伺服器:https://amzn.to/2B25XbG
-一个Arduino Nano:https://amzn.to/2MmZsVg
- HC-06蓝牙模块:https://amzn.to/2B1Z3CY
-一个OLED显示屏:https://amzn.to/2OySnyn
- 5毫米RGB LED:https://amzn.to/2B56hq3
-某些标头connetcors:https://amzn.to/2nyZg7i
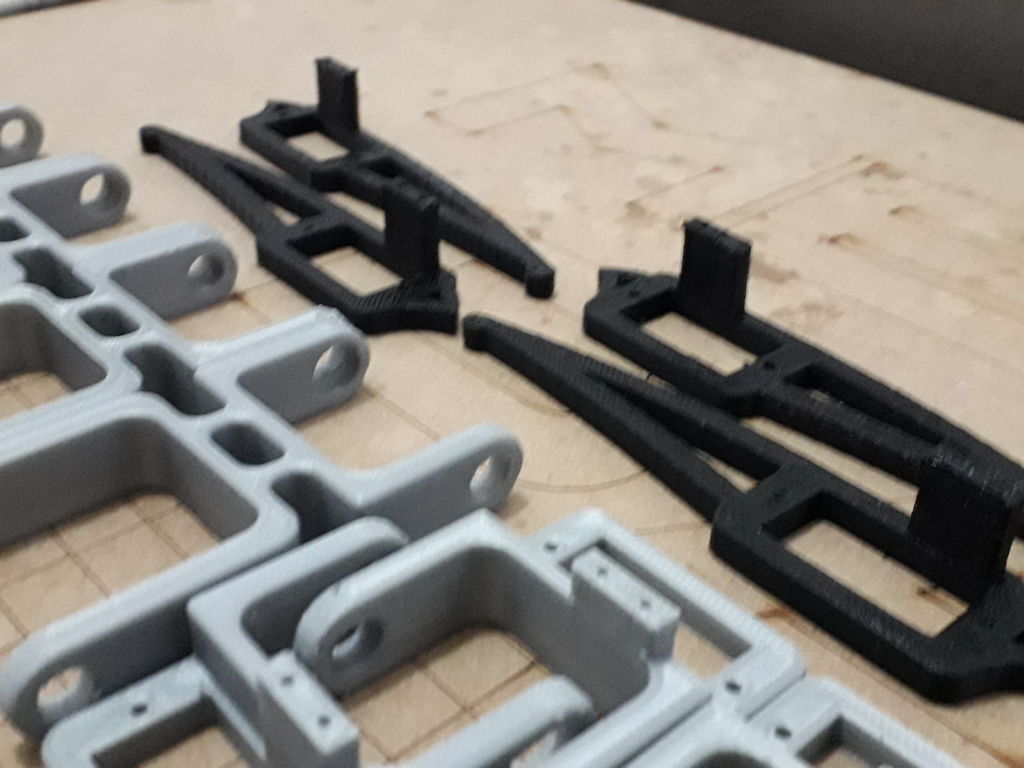
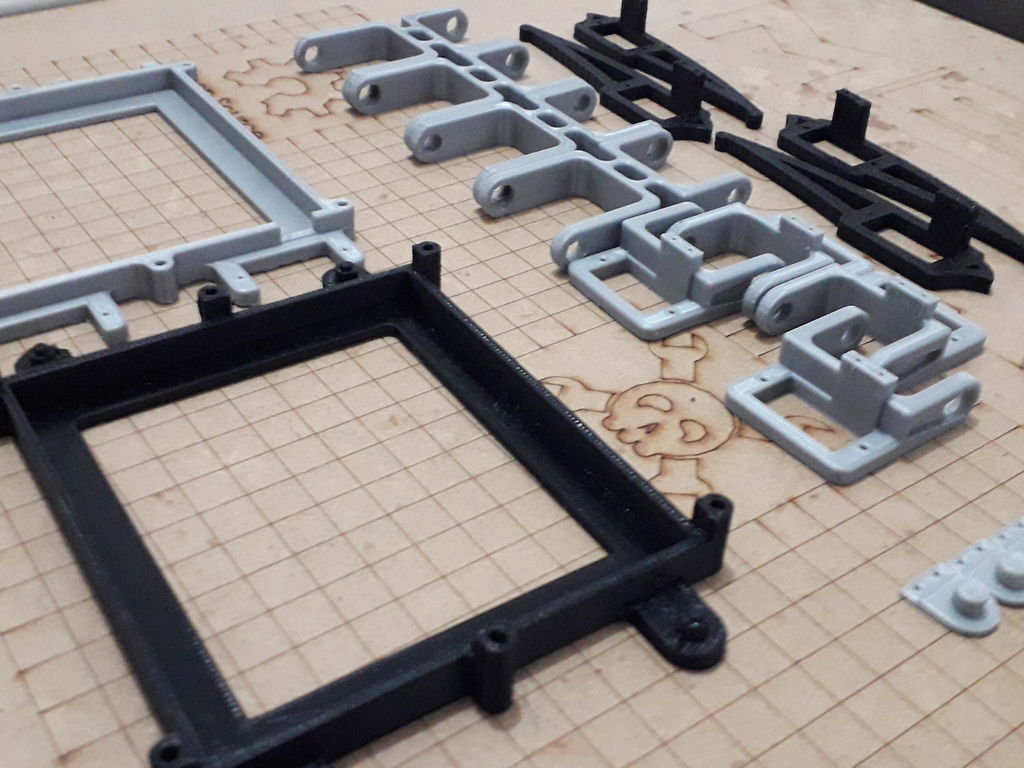
-然后,您需要使用3D打印机打印它们的机器人主体和平度
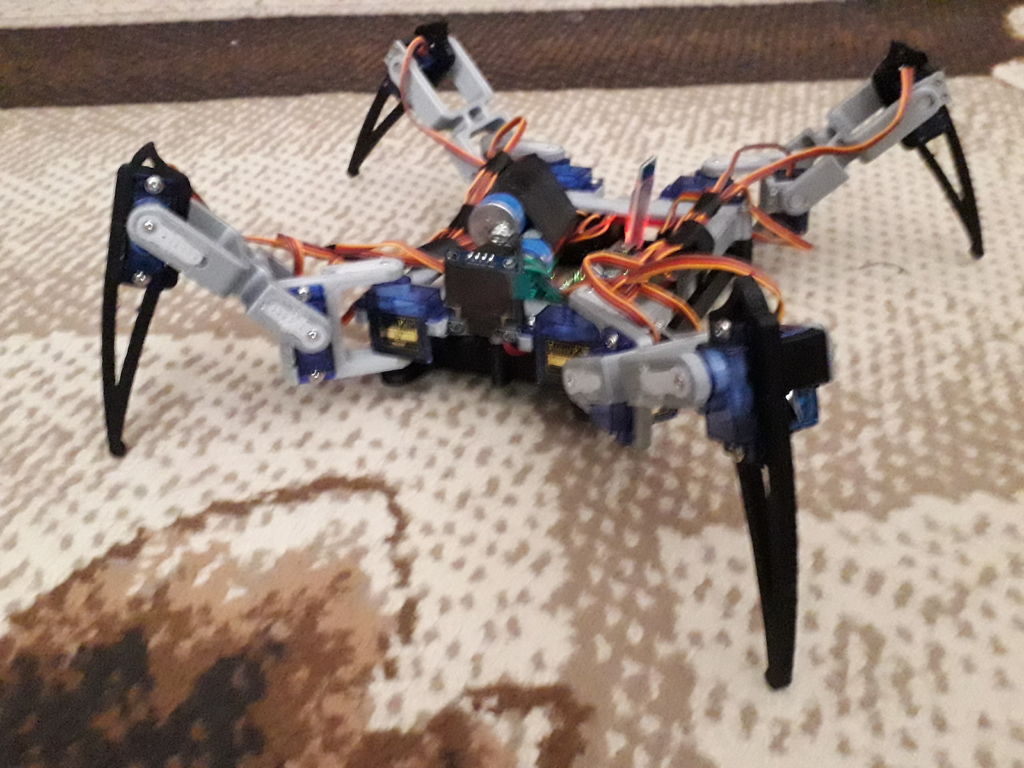
第5步:机器人组装
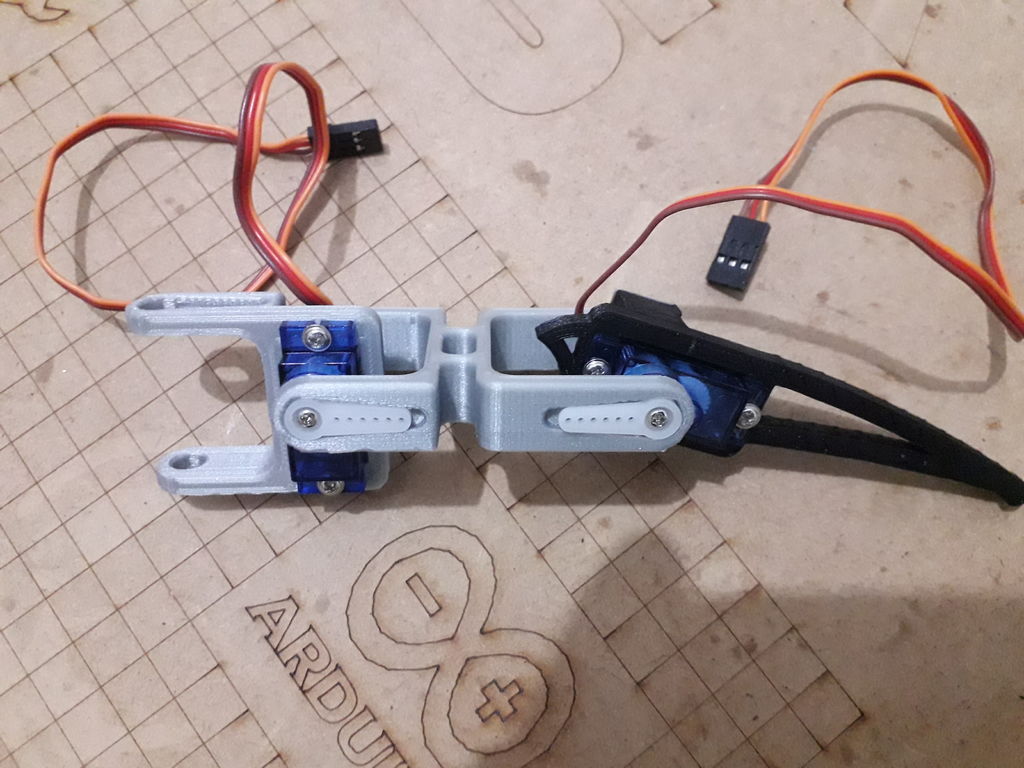

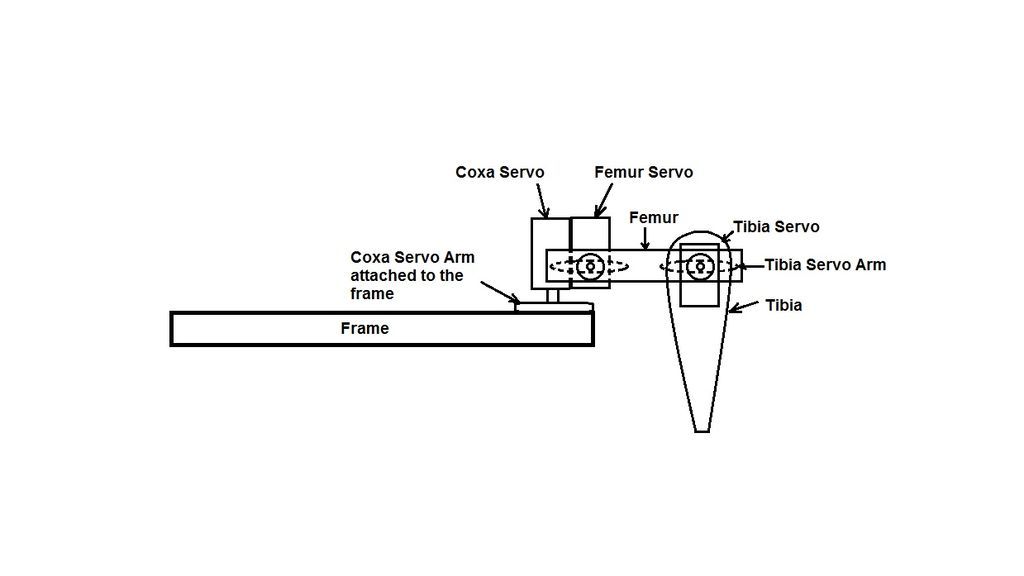
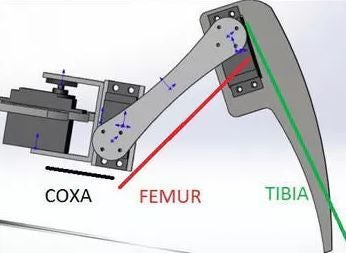
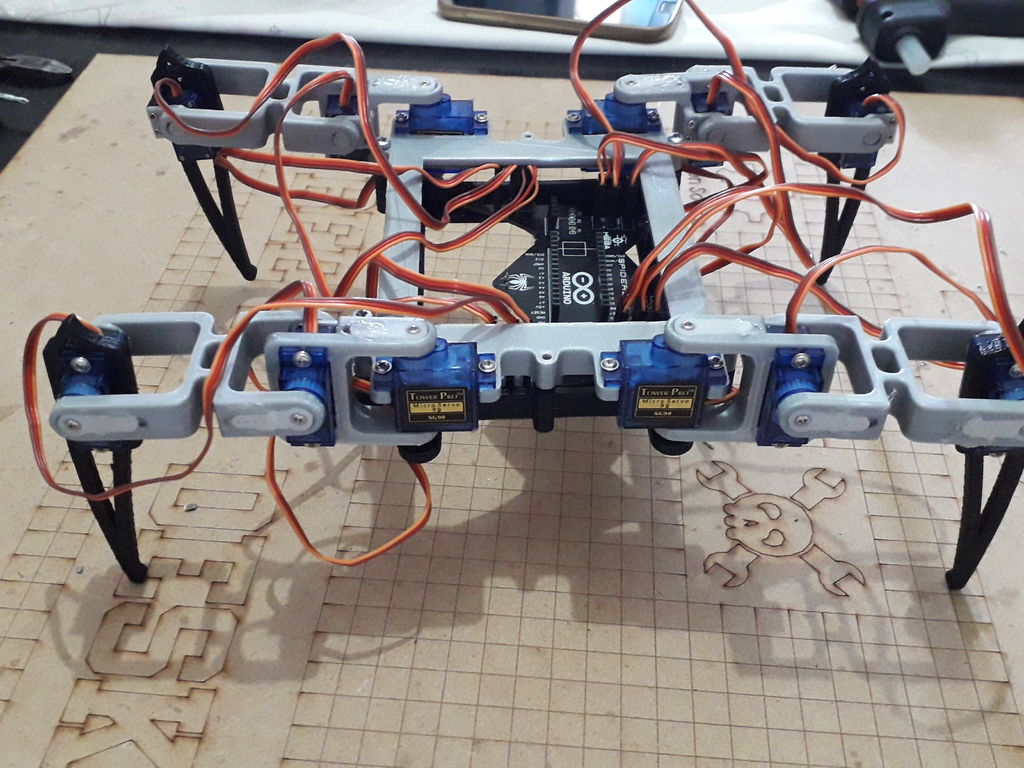
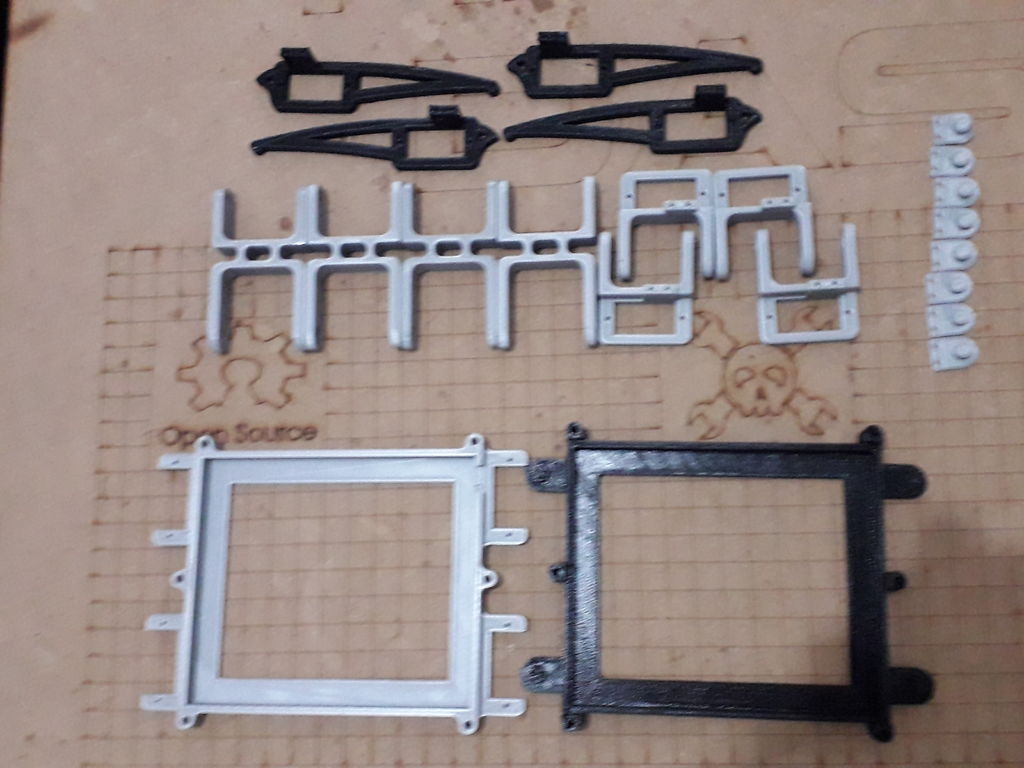
现在我们已经准备好PCB并焊接好所有组件,之后我们需要组装obot body,操作过程非常简单,因此只需按照我演示的步骤进行操作,我们首先需要准备每条腿的一侧,并使其成为引线,我们需要两台伺服电机来进行连接,并为此制作Coxa,Femur和Tibia印刷零件小附件。
关于机器人的车身零件,您可以从这里下载其STL文件。
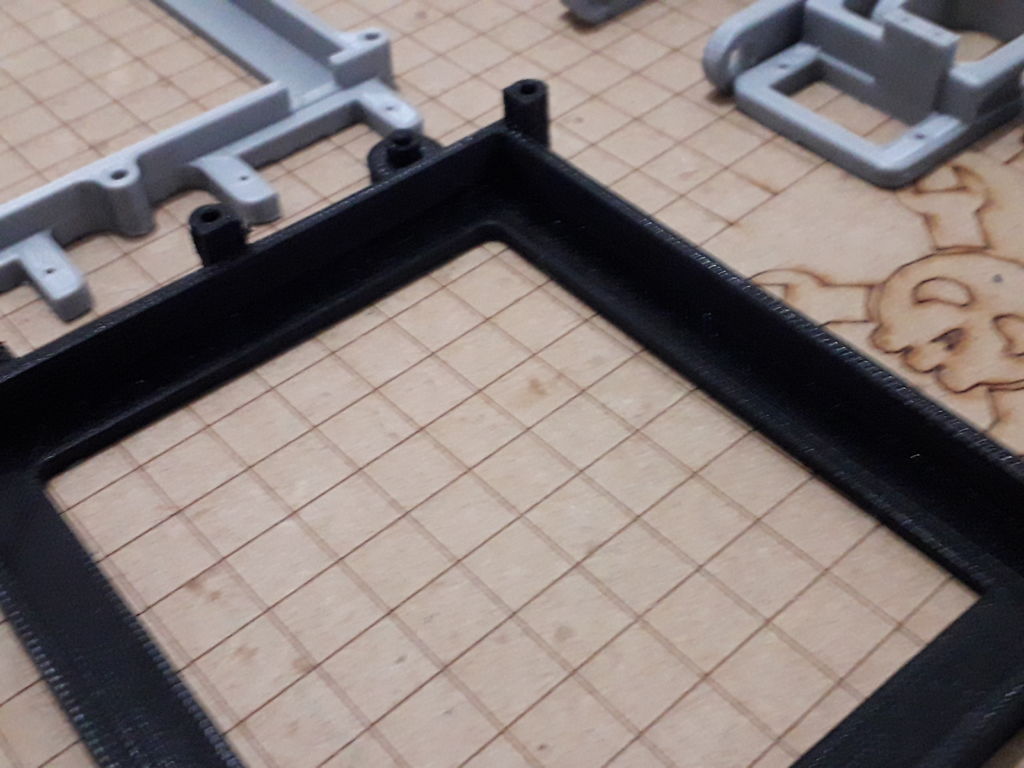
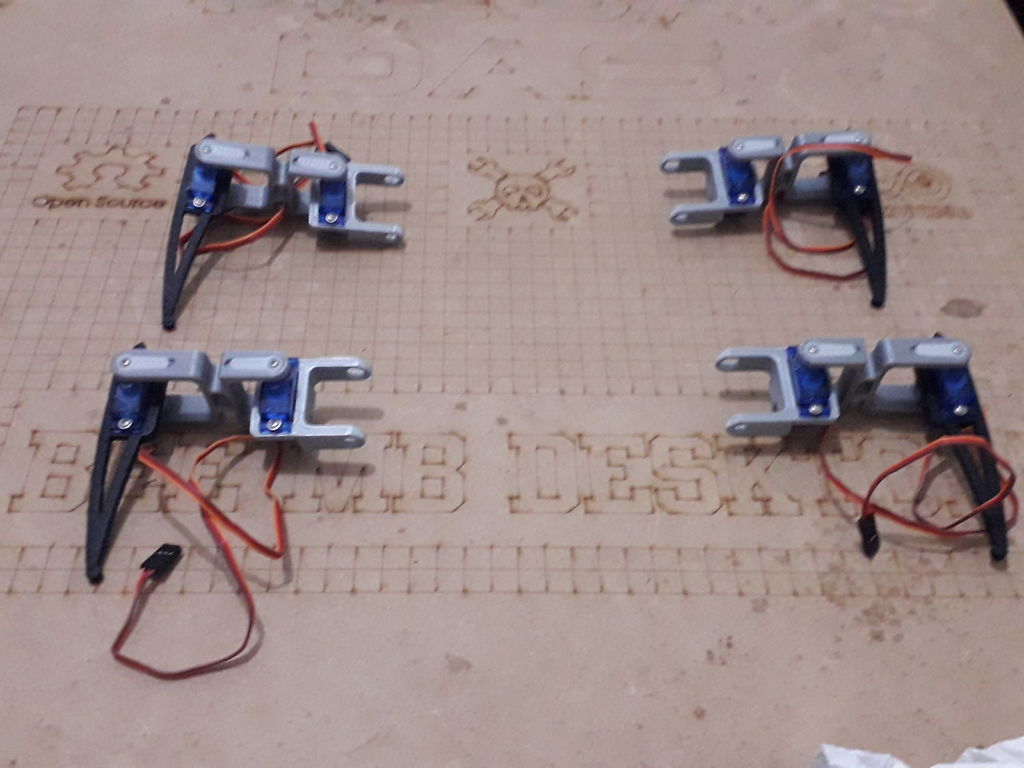
从第一个舵机开始,将其放置在插槽中,并用螺钉将其固定,之后,将伺服轴旋转至180°,而无需放置用于连接的螺钉,然后移动到下一个部位,即股骨,使用第一个伺服关节轴和连接件将其连接到胫骨。完成腿部动作的最后一步是放置第二个关节,这意味着第二个伺服器将腿部的第三部分固定在Coxa上。
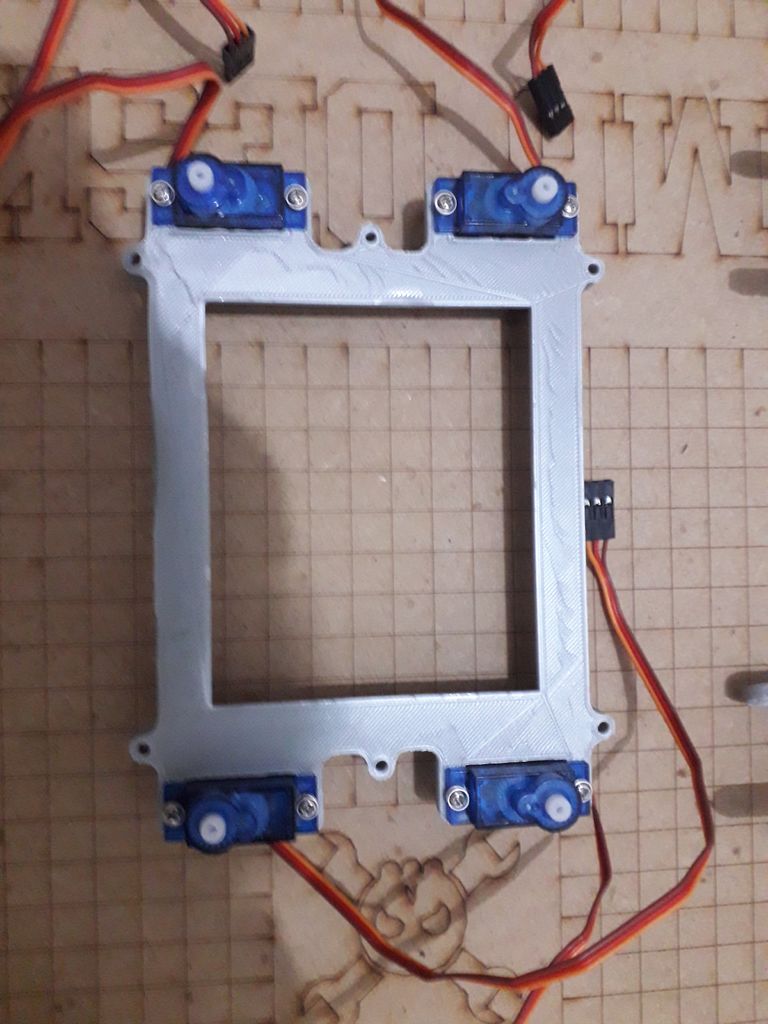
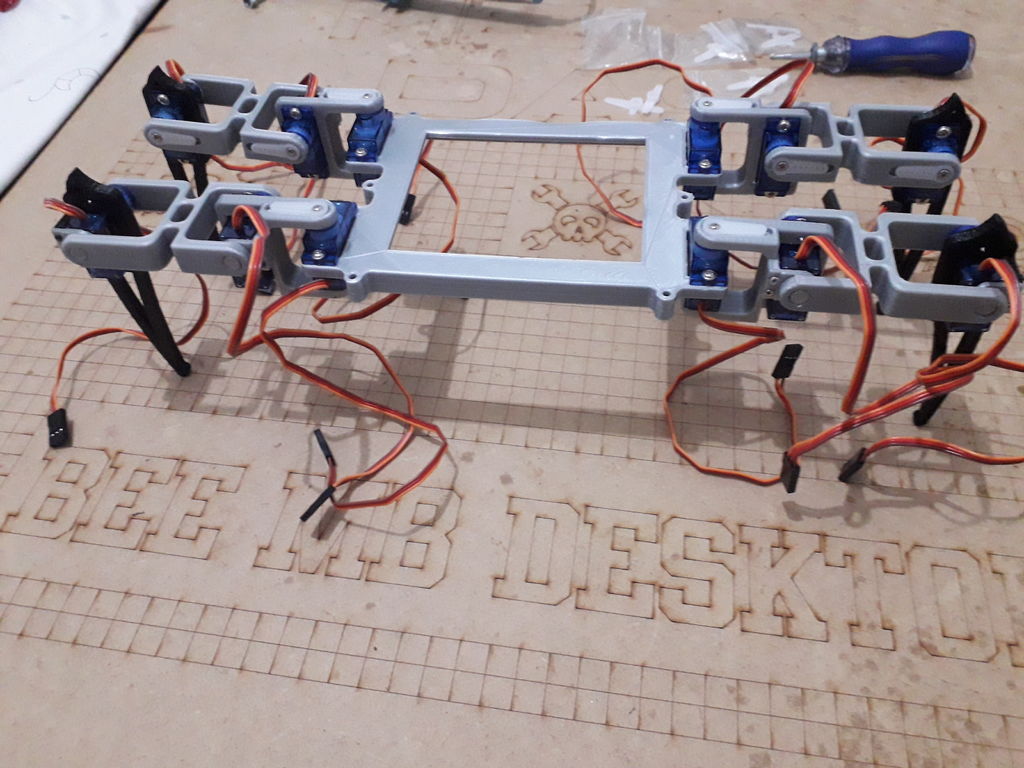
现在,对所有腿部重复相同的操作,以得到四个腿部准备好了。之后,拿起上机架并将其余的伺服器放入它们的插座中,然后将每条支腿连接到适当的伺服器上。最后只有一个印刷部分是机器人底部的机箱,我们将在其中放置电路板
步骤6:Android应用。

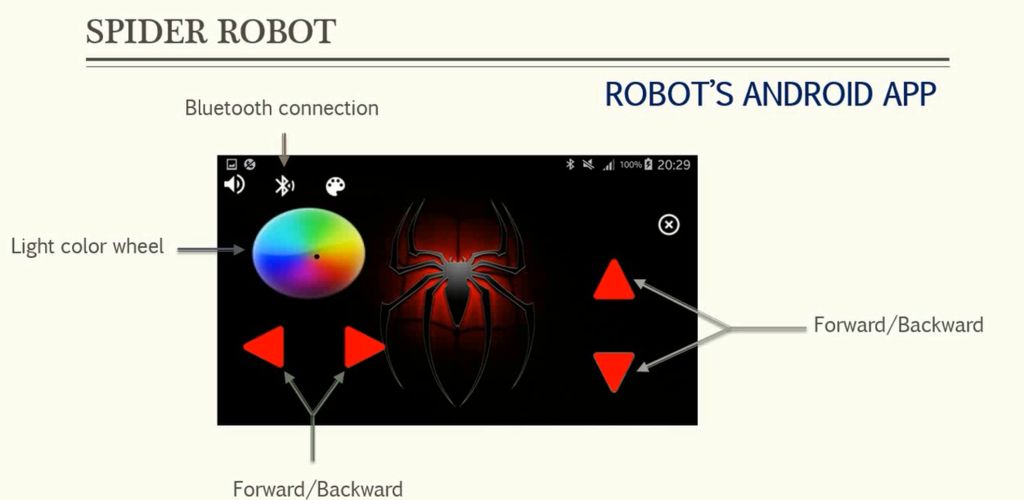
在谈论Android时,您可以通过蓝牙将其连接到机器人
,并进行向前和向后的运动以及向左和向右的转弯,还可以控制通过从此色轮中选择所需的颜色来实时显示机器人的灯光颜色。
您可以通过以下链接从此链接免费下载android应用:此处
步骤7:Arduino代码和测试验证
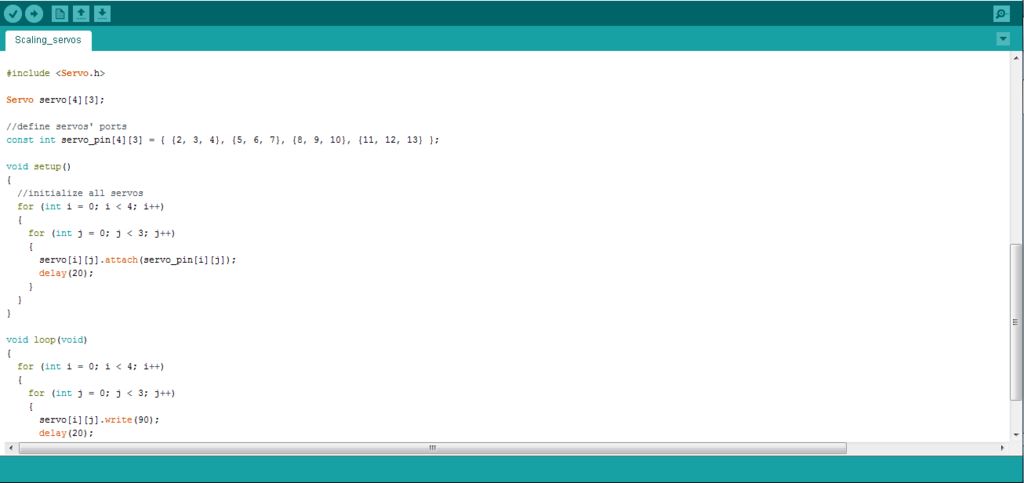

现在我们已经准备好运行机器人了,但是我们需要先设置关节角度,因此请上传设置代码,该代码可让您将每个伺服器放入通过将伺服器以90度角安装在正确的位置,请不要忘记连接7V DC电池以运行机器人。
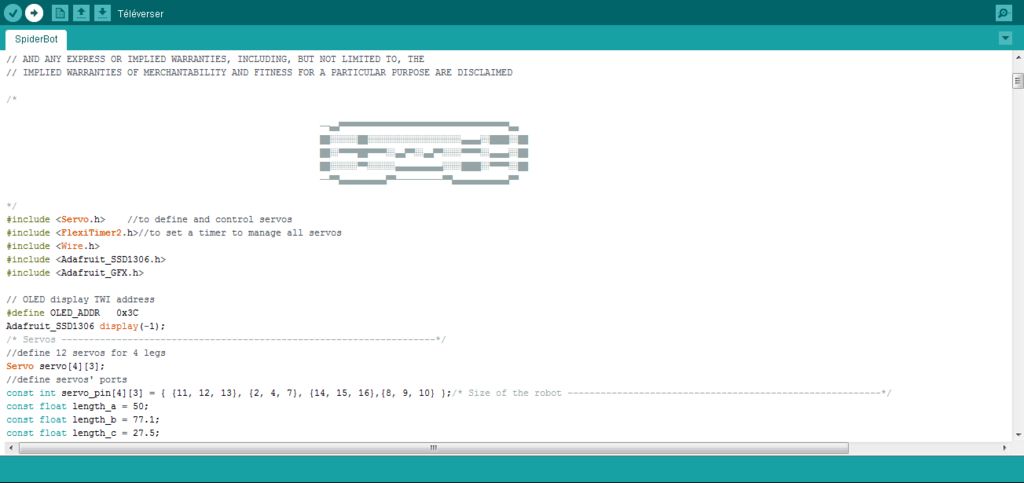
下一步,我们需要使用android应用上传主程序来控制机器人。
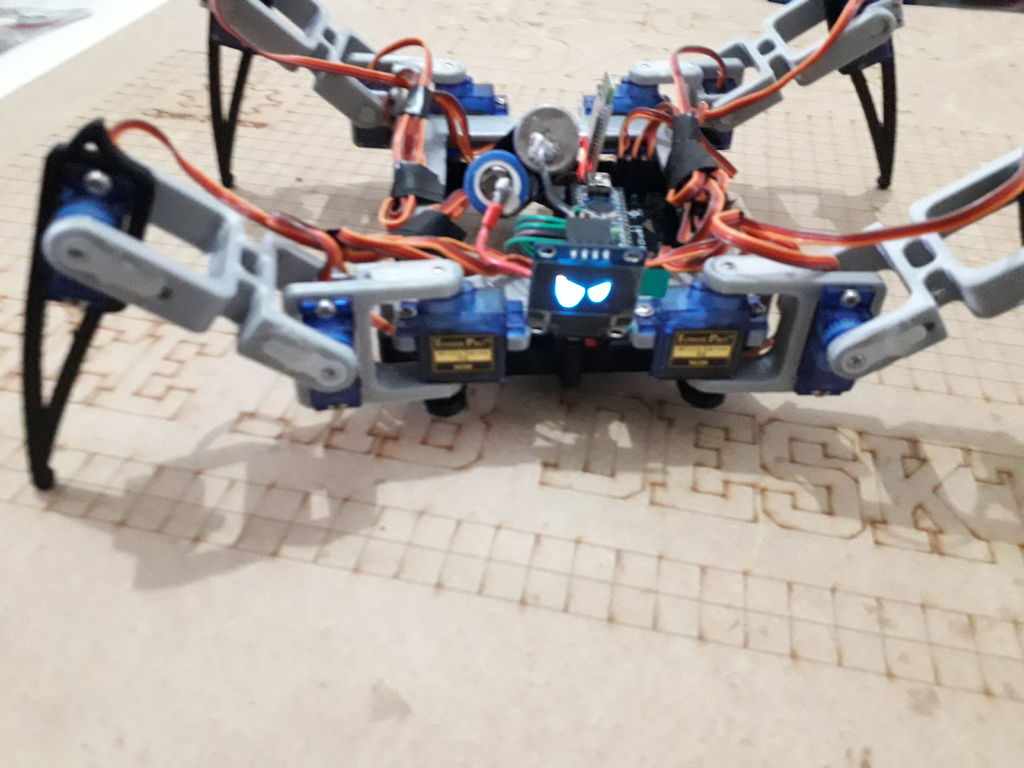
上传代码后,我已连接OLED显示屏以显示我在主代码中所做的Cozmo机器人笑容。
您可以在上面的图片中看到伙计,该机器人遵循了我的智能手机发送的所有指令,并执行了一些其他改进以使其更加黄油。
-
Arduino
+关注
关注
188文章
6469浏览量
186969
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【开源项目】你准备好DIY一款功能强大的机器人了吗?
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系

Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
DIY推荐!自制一个基于ESP32的沙画机器人
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论