 Arduino控制的机器人真空吸尘器的制作
Arduino控制的机器人真空吸尘器的制作
步骤1:必需的组件

电动机罩-控制电动机。也称为H桥。这里的电动机罩是带有L298P的YFRobot。 Therae是具有不同触点控制的其他型号。
两个带齿轮和动力线的电动机。带齿轮的电动机的转速为100-200 RPM(每分钟转数)。最好将1uF的陶瓷电容器连接到电动机的电源触点上,以减少电噪声。
两个轮子
电池组,蓄电池或移动电源-5伏特
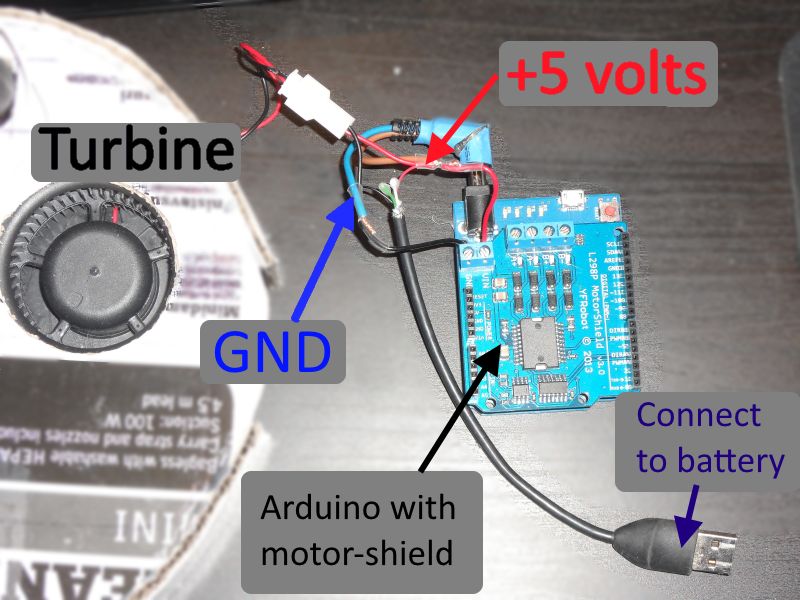
5伏计算机冷却涡轮机。或使用12伏电压-但这需要额外的12伏电源或升压转换器5伏至12伏。可以在ebay上找到一个涡轮:“冷却风扇5V”。
一组强磁铁
用于连接电池组的电线。或USB电缆-通过USB电源连接器连接到移动电源。
带有Arduino电源连接器的电缆
Arduino接触线(面包板电线)
纸板
胶水或熔化的胶水
锡片(例如,来自铝罐)
塑料盒-用于灰尘箱
github上的程序
步骤2:在机箱上布置组件
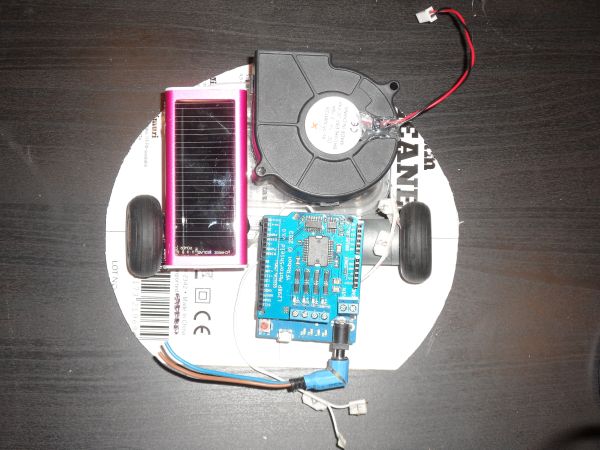
从硬纸板上切出圆环-机器人的底盘,在上面布置组件。
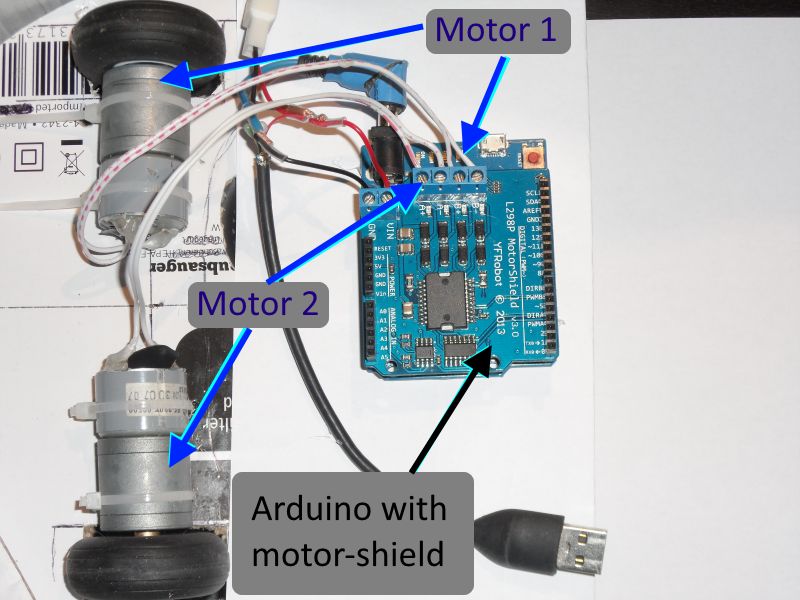
步骤3:设置电机

设置电动机(带齿轮)和轮毂-切出轮毂孔,然后用绳索,钢丝绳或塑料扎带将电动机固定在纸板上。
步骤4:设置涡轮

在涡轮机的机架上切出圆孔,并将涡轮机粘在机架上。
步骤5:涡轮和电机
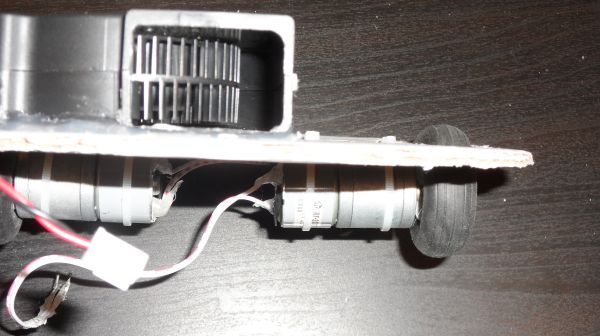
涡轮机位于机箱顶部,电机位于机箱下方。
步骤6:准备设置垃圾箱
在要固定塑料盒的位置上做标记-这将是一个垃圾桶。
步骤7:固定磁体

打开
步骤8:修复Dast-bin


在要放置垃圾桶的地方放一张纸。
将塑料盒放到纸上-这样可以保护要粘贴的盒子
将磁铁放在塑料盒周围。磁铁会粘在顶部粘合的磁铁上方的位置上-将纸张固定在盒子下面。
用胶水将磁铁固定到盒子上。当胶干后,盒子将被磁铁固定在机箱上,可以将其取出。
切掉纸。
步骤9:修复Arduino支架

木棍用胶水固定,因此可以将Arduino板放在这些棍上。
或者使用另一种方法用电机固定Arduino板-shield。
步骤10:准备电源线
使用电线连接至电池组。
或使用USB线连接到移动电源。
请小心
错误的极性会损坏Arduino和马达罩
电源线短路会损坏电池或移动电源
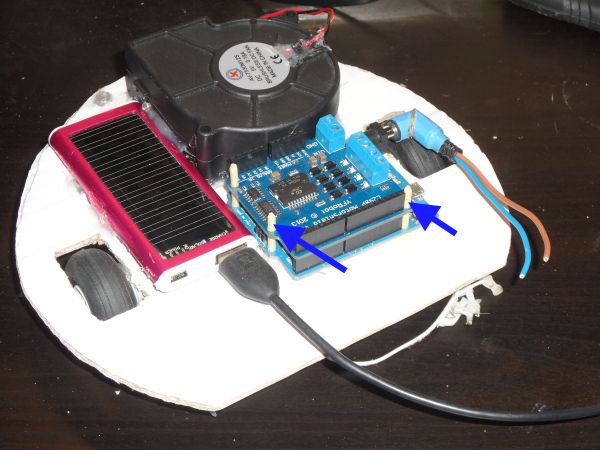
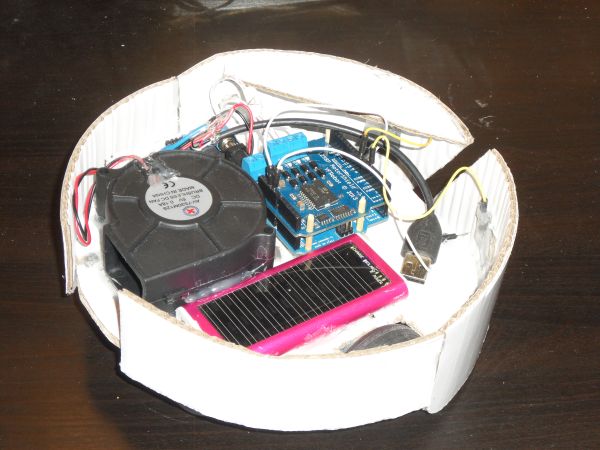
步骤11:连接电源线
连接Arduino,涡轮,电机护罩和电池组的所有电源线。
注意
错误的极性会损坏Arduino和电机护罩
电源线短路会损坏电池或移动电源
上电前检查。
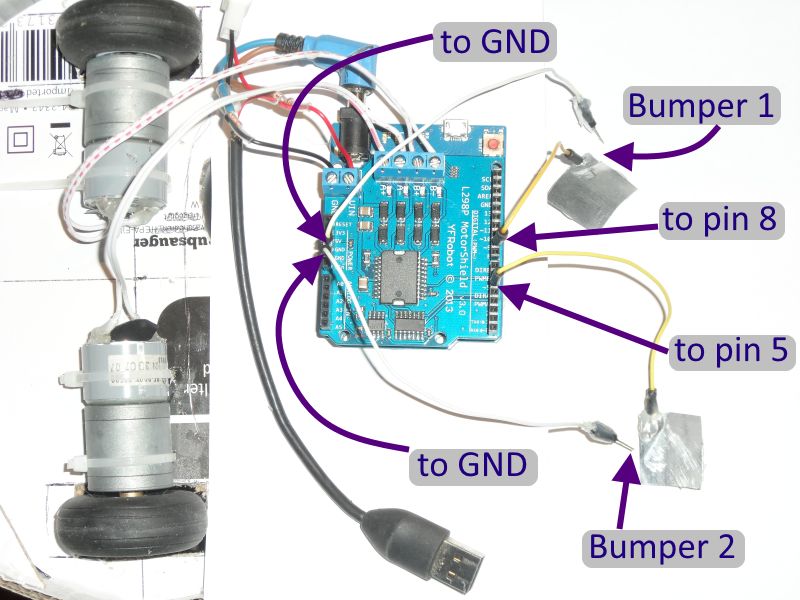
步骤12:制作保险杠
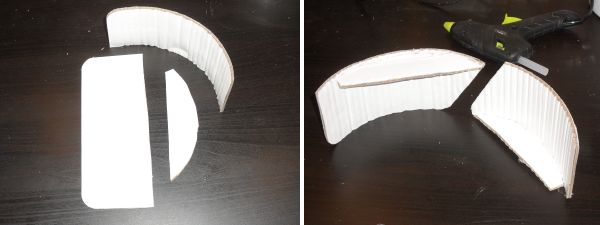
保险杠由纸板条纹制成。他们弯曲并粘合成这种形状。
步骤13:设置保险杠


保险杠固定在
如果需要一些空间直到保险杠,则将底盘切开一点。
步骤14:保险杠的触点
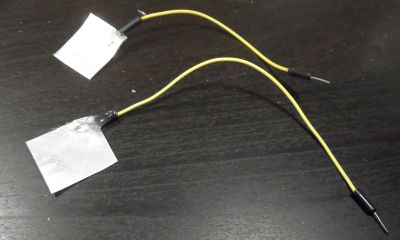
清洁并刮擦锡和电线以获得更好的触点。锡片连接到电线并通过胶水固定。确保胶水未放在锡和电线之间。
步骤15:连接保险杠
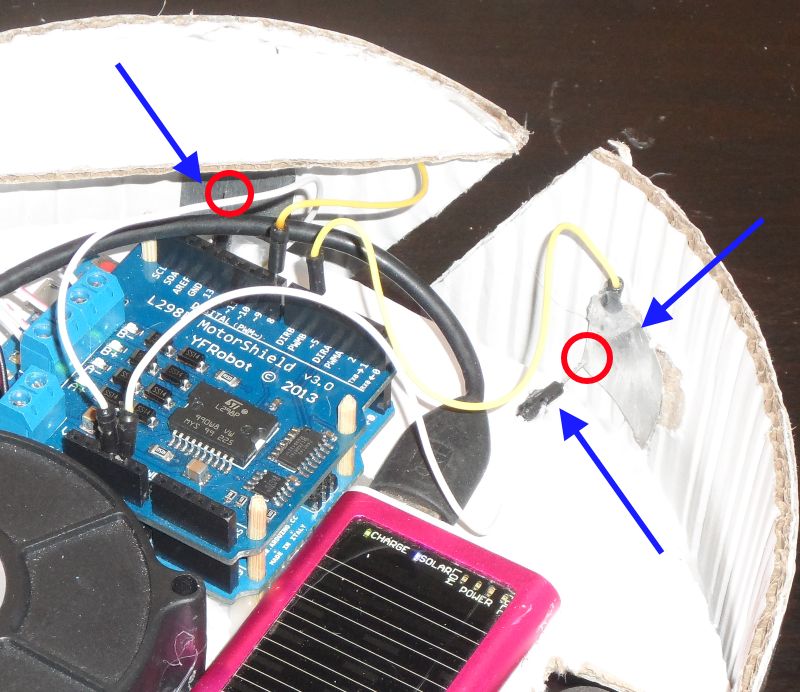
将触点从锡固定到保险杠用胶水-将它们连接到Arduino输入(例如引脚5和8)。
另一根电线(其末端带有触点)固定在机箱上此类触点的前面。将这两条线连接到Arduino GND。
按下保险杠(例如,撞到墙)时-触点已连接,一个引脚连接到GND。
步骤16:设置过滤器

一块合成纤维被用作
步骤17:后支架


塑料或软木被用作后支架-将其通过胶水固定在盒子上。
当机器人在其车轮上时,形状或位置以盒子在离地面1毫米的方式固定。
盒子的细孔是空气中地板上的灰尘。
如果盒子太高-切开墙壁并重新粘上磁铁。
步骤18:程序
github上的程序
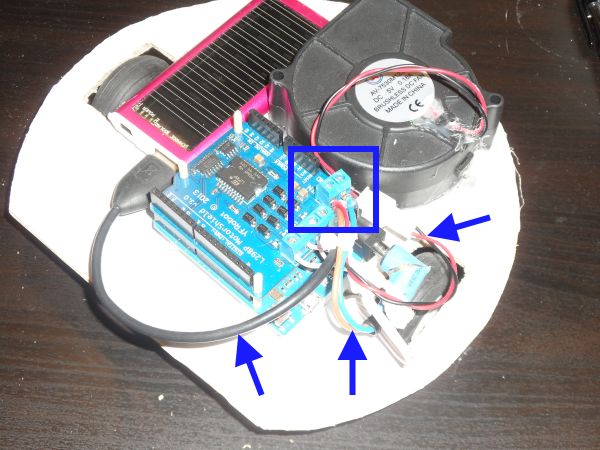
步骤19:有关连接的更多详细信息
有关互连的一些详细信息。
Motor-shi
涡轮,Arduino和电机罩通过电源线(或通过USB电缆的移动电源)连接到电池。
请注意极性-错误的极性会破坏Arduino和马达罩!
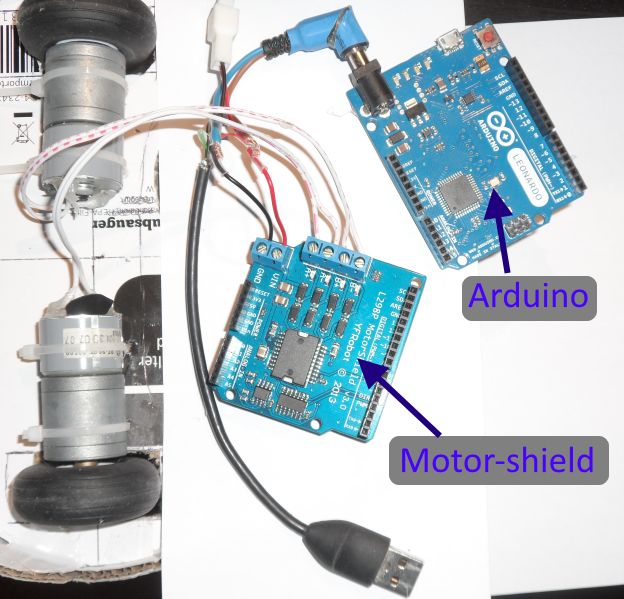
步骤20:使用Arduino Nano
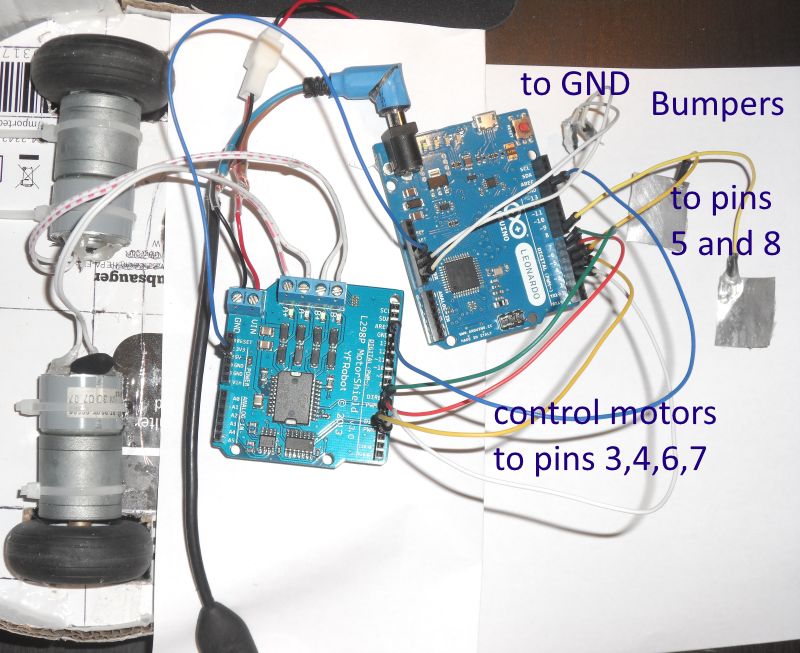
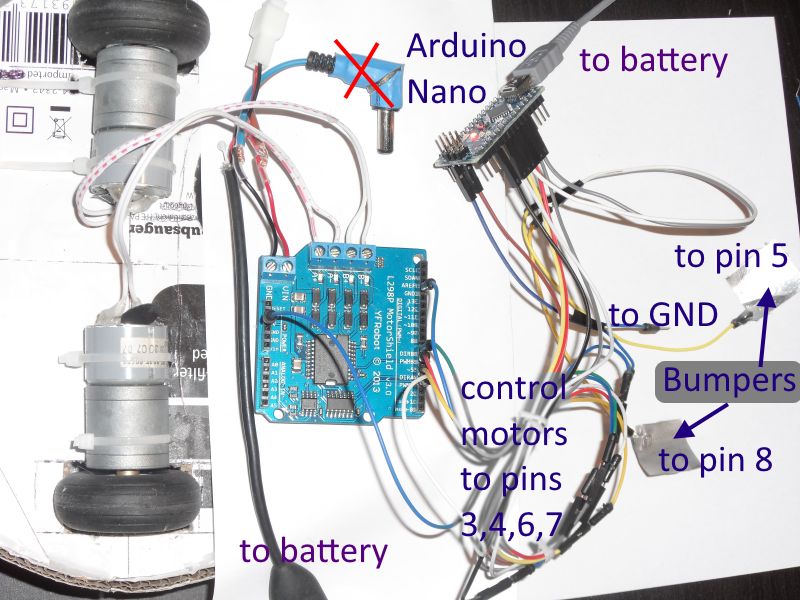
电动机屏蔽板可以通过电线连接到Arduino板上。只需按照以下方式在Arduino和电动机屏蔽罩之间连接以下触点:3、4、5、6、7、8,GND,+ 5V
:引脚GND Arduino已连接
引脚5V的Arduino已连接到电机屏蔽的GND,
引脚3的Arduino已连接到电机屏蔽的PIN 3 》 p》
pin 4 Arduino连接到电机屏蔽罩上的pin 4,
等。
因此可以使用比Arduino Nano小的板子- -shield。
步骤21:使用HG7881电机驱动器
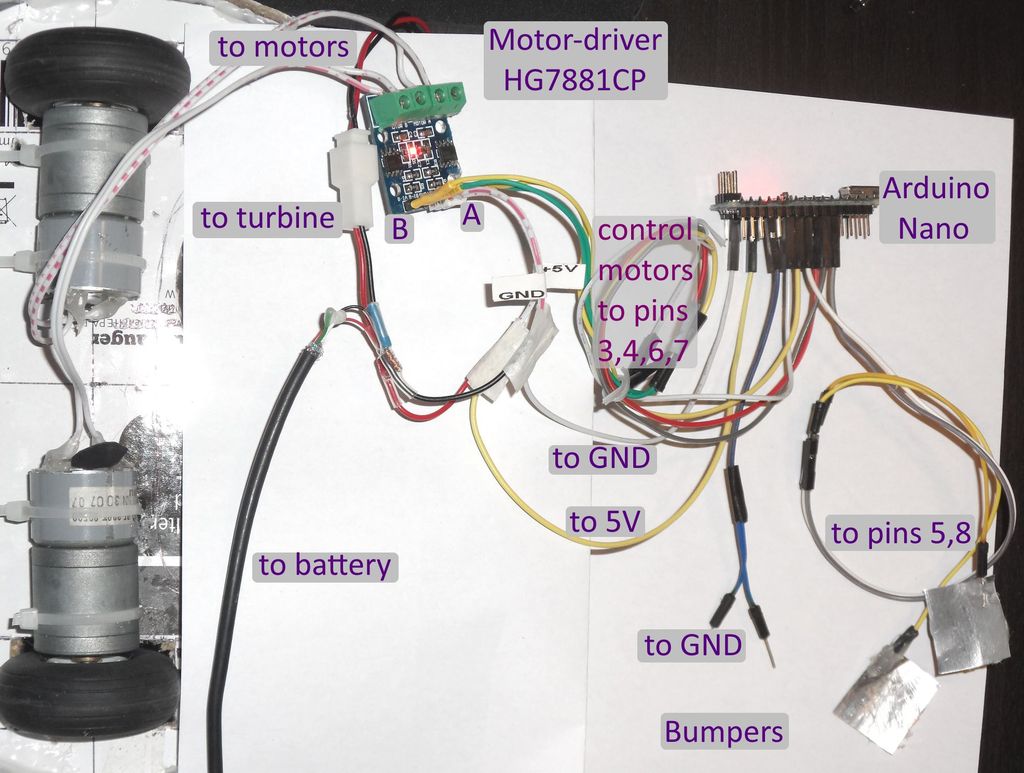
可以通过以下方式将HG7881上的电机驱动器连接到Arduino:电线。它比电动机屏蔽罩便宜得多,但最大电流为800mA-对于大多数小型DIY机器人来说应该足够了。
-
吸尘器
+关注
关注
2文章
331浏览量
22219 -
Arduino
+关注
关注
188文章
6468浏览量
186939
发布评论请先 登录
相关推荐
浅谈扫地机器人用到的那些电子元器件!
专为吸尘器定制的电机控制板方案:创新与突破
探索大吸力功率吸尘器的马达驱动方案
探索无线吸尘器电机驱动的卓越方案
智能吸尘器马达驱动板方案的深度剖析
鼎盛合|车载便携无刷吸尘器方案
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
扫地机器人避障技术的发展史
2029年全球吸尘器市场规模预计将达906.12亿元

吸尘器优选指南:灰尘感应能力对深度清洁很重要!

做一个车载吸尘器方案应用的技术及芯片
如何使用PLC控制机器人
家用吸尘器噪音分析及降噪方法【其利天下技术】
吸尘器究竟是如何替你“吃灰”的【其利天下技术】





 工商网监
工商网监
评论