 英创信息技术工控主板支持铁电存储器方案
英创信息技术工控主板支持铁电存储器方案
英创公司的ARM9 系列工控主板产品,对数据的记录均采用了基于NandFlash的文件系统,但在实际应用中,客户经常需要频繁的记录一些小块的重要数据,同时要求数据在掉电情况下不丢失,这时如果采用文件系统就不能完全满足需求。通常的解决办法是将数据直接存储在非易性存储器中(NVRAM)。NVRAM有两种基本类型,一是基于SRAM的传统NVRAM,另一种是近些年广泛使用的铁电存储器,与传统的基于SRAM技术的存储器相比,铁电存储器在信号接口、操作功耗方面有无可比拟的优势。目前在市场流行的有4Kb-256Kb铁电存储器产品,并有多种接口类型可供选择,包括I2C、SPI接口等,本文以Ramtron公司的FM24L256为例,介绍英创主板EM9160操作FM24L256的方法。
FM24L256非易失铁电存储器结构容量为32,768 x 8位,读/写次数无限制,掉电数据保存10年,无延时写入操作,采用I2C总线接口,总线频率可高达1MHz。同时具有工业级温度范围,低功耗操作等特点。EM9160 是英创公司的一款预装Windows CE 实时操作系统的高性价比ARM9 工控主板产品。EM9160 最多可支持16 位方向可独立设置的GPIO,这些GPIO 均可被用来仿真作为I2C的信号。
FM24L256为SOP8封装芯片,只需把2位I2C总线信号与EM9160的GPIO相连,即完成扩展硬件的连接。
EM9160工控主板对铁电存储器FM24L256的驱动程序描述如下:
#include ‘EM9160_DIO_EX.h’
#define GPIO0 0x01
#define GPIO1 0x02
#define GPIO2 0x04
#define GPIO3 0x08
#define GPIO4 0x10
#define GPIO5 0x20
#define GPIO6 0x40
#define GPIO7 0x80
#define GPIO8 0x100
#define GPIO9 0x200
#define GPIO10 0x400
#define GPIO11 0x800
#define GPIO12 0x1000
#define GPIO13 0x2000
#define GPIO14 0x4000
#define GPIO15 0x8000
#define SCK GPIO6 // I2C时钟信号,可根据实际情况更改
#define SDA GPIO7 // I2C数据信号,可根据实际情况更改
实现SCK和SDA信号的操作函数:
void GPIO_i2c::SetSDADir(int Dir) // 设置SDA方向
{
if(Dir)
PIO_OutEnableEx( SDA ); // set gpio7 to output (SDA)
else
PIO_OutDisableEx( SDA ); // set gpio7 to input (SDA)
}
void GPIO_i2c::SetSCL(int Level) // 置高/置低SCK信号
{
if(Level)
PIO_OutSetEx( SCK );
else
PIO_OutClearEx( SCK );
}
void GPIO_i2c::SetSDA(int Level) // 置高/置低SDA信号
{
if(Level)
PIO_OutSetEx( SDA );
else
PIO_OutClearEx( SDA );
}
int GPIO_i2c::GetSDA() // 读取SDA状态
{
DWORD dwSDAStatus = 0;
// put code here to get SDA status
PIO_StateEx( (UINT16*) &dwSDAStatus );
dwSDAStatus = dwSDAStatus & SDA;
if(dwSDAStatus)
{
return 1;
}
return 0;
}
int GPIO_i2c::I2C_InitController( ) // 设置SCK,SDA,只初始化时执行一次
{
// set gpio6 and gpio7
PIO_OutEnableEx( SCK ); // set gpio6 to output (CLK)
PIO_OutSetEx( SCK ); // set CLK
SetSDADir(0); // set SDA to input
return 0;
}
根据FM24L256的时序要求,构造相应的读写函数,EM24L256的读写时序如下图所示:

////////////////////////////////////////////////////////////////////////////
// 从I2C器件读取一个或多个字节
// 输入参数:
// uDevAddr:器件地址
// uRegIdx: 器件寄存器地址
// ReadBuf: 数据缓存
// ReadLen: 读取数据个数
// return = -1: 失败
// = ReadLen: read succeed!
////////////////////////////////////////////////////////////////////////////
int GPIO_i2c::I2C_ByteRead(UCHAR uDevAddr, UINT16 uRegIdx,
UCHAR* ReadBuf, int ReadLen )
////////////////////////////////////////////////////////////////////////////
// 向I2C器件写入一个或多个字节
// 输入参数:
// uDevAddr:器件地址
// uRegIdx: 器件寄存器地址
// ReadBuf: 数据缓存
// ReadLen: 写入数据个数
// return = WriteLen: 写入成功
// = -1: 写入失败,没有应答信息
////////////////////////////////////////////////////////////////////////////
int GPIO_i2c::I2C_ByteWrite(UCHAR uDevAddr, UINT16 uRegIdx,
UCHAR* WriteBuf, int WriteLen)
本文是以EM9160操作FM24L256为例,介绍如何构造I2C接口,这个方法也完全适合英创公司的其他嵌入式工控主板产品,如EM9000、EM9161、EM9260、ETR232i等。EM9160与FM24L256连接十分简单,在需要频繁记录数据的场合,本文介绍的方案是一个不错的选择,经过测试,EM9160对FM24L256的写入速度可达每秒56K字节,感兴趣的客户可向英创索要相关源代码。
-
WINDOWS
+关注
关注
3文章
3547浏览量
88736 -
嵌入式主板
+关注
关注
7文章
6085浏览量
35353
发布评论请先 登录
相关推荐
英创支持Linux高级客户自行移植内核
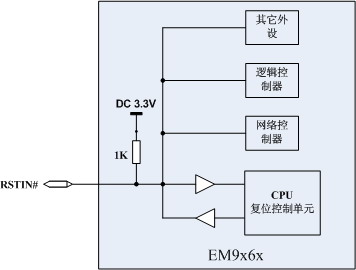
英创信息技术工控主板的复位管理介绍
英创信息技术WinCE工控主板的数据库配置简介
英创信息技术Linux工控主板支持3G网卡介绍
英创信息技术工控主板产品选型指南介绍
英创信息技术Linux工控主板的高速大容量存储方案简介
英创信息技术ESMARC工控主板 SFP光纤连接方案简介





 工商网监
工商网监
评论