 英创信息技术WinCE主板CAN接口数据接收性能测试介绍
英创信息技术WinCE主板CAN接口数据接收性能测试介绍
在英创公司嵌入式主板产品中,高端的335x主板系列及低端的ESM9287主板均可支持2路CAN总线标准接口。本文提供CE平台的EM3352和EM9287的CAN接口的数据接收的性能情况,供客户在开发应用程序时参考。
测试条件:
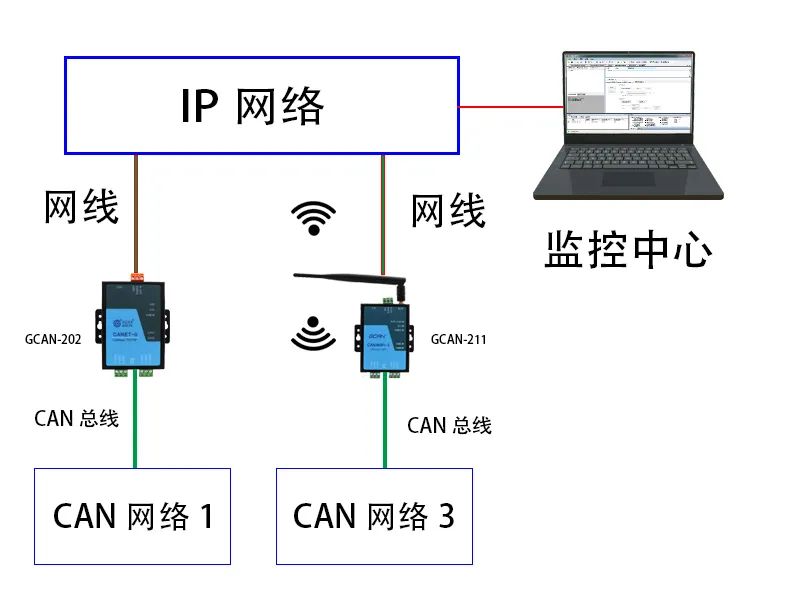
1、由一张独立的Linux平台的主板发送数据,模拟CAN总线环境。数据发送速率由示波器标定确认。发送的数据帧中包含当前发送数据帧的累积计数值。
2、在CE平台运行的测试程序采用VC/C++编写。接收线程以最快速度读取底层CAN驱动已接收到的数据包,并提供接收数据包统计,并与数据帧的计数值比较。
EM3352(WEC7)测试结果:
| CAN Bit Rate | CAN总线帧速 | 丢包情况 | 其他说明 |
| 1Mbps | 2000帧/s | 无 | 此时CPU负载率为17% |
| 1Mbps | 2000帧/s | 无 | 远程桌面进程使CPU负载率至37% |
| 1Mbps | 5000帧/s | 有 | 此时CPU负载率至90% |
在5000帧/s的测试中,当帧速返回2000帧/s,则丢包则消失,CPU负载率恢复正常。过程中系统不会死机。
EM9287(CE6.0)测试结果:
| CAN Bit Rate | CAN总线帧速 | 丢包情况 | 其他说明 |
| 1Mbps | 1000帧/s | 无 | 连续监测320000帧数据 |
| 500kbps | 1000帧/s | 无 | 连续监测720000帧数据 |
CE平台的CAN驱动程序,至少设置了能缓冲256帧数据的buffer,对1Mbps波特率按每帧数据160us(实测值)计算,则内部缓冲区可至少保存40ms的数据。换句话说,上层应用程序需在40ms内把驱动程序已接收的数据全部取出,这样才能保证不丢包。典型的应用程序读取数据调用如下:
//一次读取尽可能多的数据帧
BOOL rc = ReadFile(hCAN, // “CAN#:”Handle
pRxBuffer, // 足够大的接收buffer
sizeof(CAN_MESSAGE)*MAX_ARRAY, // MAX_ARRAY=256
&dwLen, // 实际读到的字节数
NULL);
为了尽快读出所有缓冲在驱动程序中的数据,最好是使用一个尽可能大的Buffer,然后通过返回的dwLen值来判断本次调用所读取的数据帧数。有些应用采用每次ReadFile读取一帧数据,然后循环直至读完所有数据也是可以的,只是效率要比一次性读完的方式稍低一些。
-
Linux
+关注
关注
87文章
11292浏览量
209329 -
嵌入式主板
+关注
关注
7文章
6085浏览量
35296
发布评论请先 登录
相关推荐
龙芯中科助力2024首届教育信息技术应用创新大赛成功举办
测试接收机的技术原理和应用场景
中科创达荣获2024年软件和信息技术服务优秀企业
信创国产化背景下的工控主板发展现状
工控主板接口全解析:国产主板的多样连接
【龙芯2K0300蜂鸟板试用】CAN接口驱动板设计、CANFD测试、CAN C++程序驱动测试
can信息帧数据链路层组成部分及功能
如何使用示波器测试CAN信号
深圳比创达EMC|EMI电磁干扰:电子设备性能的头号敌人.
ELF 1技术贴|CAN接口浅析:从原理到对测






 工商网监
工商网监
评论