 英创信息技术IEEE1588协议驱动分布式系统高精度同步触发简介
英创信息技术IEEE1588协议驱动分布式系统高精度同步触发简介
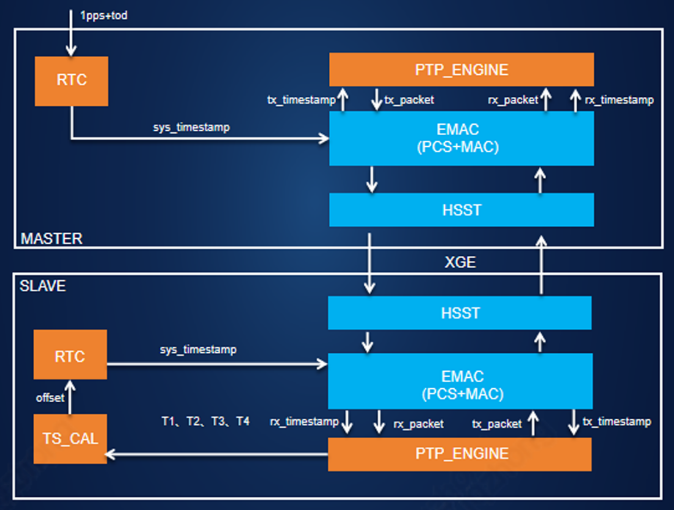
IEEE1588是精确网络对时协议,简称PTP。它通过硬件实现的时间标签(hardware time stamp),使对时精度达到亚微秒级(< 1us),大大高于常规的网络对时协议(NTP)。PTP协议的另一个特色是它可输出精确时间同步的硬件脉冲,通常称为PPS脉冲。在网络化的嵌入式系统中,利用PTP的硬件PPS脉冲,可对处于不同位置的多台设备实现同步触发的功能。这对分布式系统的数据采集、实时控制都具有非常的意义。
英创公司的多款嵌入式主板,ESM7000、ESM6802和ESM6800,其网络接口均支持PTP协议,且可输出PPS脉冲,因此是分布式智能设备的理想嵌入式平台。以下将以ESM7000为例,介绍实现分布式同步触发的软硬件方案。
基于PTP的同步触发软件流程
ESM7000预装的Linux平台文件系统中,已包含了PTP对时及硬件时间同步的完整工具,即ptp4l和phc2sys,同时可方便的控制PPS脉冲的使能。在这个基础上,按照图1所示流程就可实现同步触发的功能。

图1同步触发软件流程
在实际的测试中发现,PTP的对时精度与网络环境有密切关系。在单一的100M网络环境所获得的设备间的同步精度在±200ns;而在1000M网环境,同步精度就下降到±1us;混合网络环境,同步精度可差至±15us。
同步触发脉冲的硬件方案
所谓硬件方案,是指图1中触发脉冲生成器的实现方案。以PTP协议生成的周期性PPS脉冲为基础,由应用程序生成触发使能信号,再通过一个简单的D触发器生成最后的触发脉冲。硬件方案涉及3个信号如下:
●PPS_OUT:整秒脉冲输出,即周期固定为1秒,在ESM7000上,PPS的脉冲宽度为10ns,上升沿有效。
●TRG_EN:触发使能,通常用一位GPIO来实现,其高电平有效。
●TRG_PULSE:触发脉冲,上升沿有效;在TRG_EN为低时,将强制TRG_PULSE为低;当TRG_EN为高时,后续的PPS_OUT脉冲上升沿将锁存高电平,从而是TRG_PULSE变高电平。TRG_PULSE脉冲上升沿将将作为系统采集控制硬件单元的触发输入,触发各个嵌入式设备同步动作。

图2同步触发脉冲生成电路原理图
在图2中,TRG_PULSE还可反馈给ESM7000主板,通知同步触发已发生。但不是必须的。
大部分ESMARC主板均可支持PTP同步触发功能。对不同型号的主板,PPS脉冲输出管脚有所不同,如下表所示:
| 主板型号 | PTP网口 | PPS信号管脚 | 备注 |
| ESM7000系列 | eth0 | CN2.GPIO0 | |
| ESM6802系列 | eth0 | CN2.GPIO24 | V2.4版才支持 |
| ESM6800系列 | eth1 | CN2.GPIO22 | 不能使用SD卡 |
| ES6801 | eth0 | CN1.GPIO0 | 不能使用CAN1 |
对选择哪一位GPIO管脚作为TRG_EN,本方案没有限制。可根据设备的具体情况来确定。
对同步触发从设备测试
本测试用从设备的“当前时间+ 偏移量”来代替主设备发布的触发时间TRGTIME,就可用简单的脚本测试整个触发过程,具体的脚本如下:
|
#!/bin/sh # trg_en_3 $1 [$2] [$3] # $1 = 0, off ptp; = 1: on ptp # $2 = number of seconds to delay from cuurent time # $3 = ip:port PATH="/usr/bin:$PATH" E_NOARGS=85 re='^[0-9]+$' TRG_EN_GPIO="gpio1" TRG_EN_DIRECTORY="/sys/class/em_gpio/em_gpio/$TRG_EN_GPIO" PHC2SYSLOG="/tmp/phc2syslog.txt" DELAY=10 # if no arg, exit if [ -z "$1" ] then echo "Usage: `basename $0` filename" exit $E_NOARGS fi # if $1 != 1, off ptp and exit if [ "$1" -ne 1 ] then echo 0 > /sys/class/ptp/ptp0/pps_enable pkill phc2sys pkill ptp4l exit 0 fi # get trigger delay is available, default = 10(s) if [ $# -ge 2 ] then DELAY="$2" fi # now we start to make trg_en step by step echo "step 1: setup gpio1 as trg_en" if [ ! -d "$TRG_EN_DIRECTORY" ] then echo "config $TRG_EN_GPIO as trg_en" echo 1 > /sys/class/em_gpio/em_gpio/export fi echo out > /sys/class/em_gpio/em_gpio/$TRG_EN_GPIO/direction echo 0 > /sys/class/em_gpio/em_gpio/$TRG_EN_GPIO/value echo "step 2: start ptp" phc2sys -s eth0 -c CLOCK_REALTIME -w -m -u 4 > $PHC2SYSLOG & sleep 1 ptp4l -i eth0 -s & echo "step 3: wait phc2sys sync convergence" num_rms=0 while [ "$num_rms" -lt 3 ] do RMS_ARRAY=$(cat $PHC2SYSLOG | tail -n 3 | sed -r 's/.*rms[ ]+([0-9]+).*/\1/g') # echo "$RMS_ARRAY" for rms in $RMS_ARRAY do if ! [[ $rms =~ $re ]] then echo "$rms is NOT an integer!" break fi echo "$rms" if [ "$rms" -lt 350 ]; then let "num_rms += 1" fi done # clear log file if rms is convergence if [ "$num_rms" -ge 3 ]; then echo "rms is convergence ($num_rms)" cat /dev/null > $PHC2SYSLOG else let "num_rms = 0" sleep 2 fi done echo "step 4: enable pps, and setup trigger time" echo 1 > /sys/class/ptp/ptp0/pps_enable TRGTIME=$(date +%s) # get current date in seconds let "TRGTIME = $TRGTIME + $DELAY" PPSTIME=$(cat /sys/class/pps/pps0/assert | cut -d '.' -f 1) echo "TRGTIME = $TRGTIME PPSTIME = $PPSTIME" echo "step 5: wait pps time reach trigger time" while [ "$PPSTIME" -lt "$TRGTIME" ] do sleep 0.1 PPSTIME=$(cat /sys/class/pps/pps0/assert | cut -d '.' -f 1) done echo "step 6: now PPSTIME = TRGTIME, set trg_en" echo 1 > /sys/class/em_gpio/em_gpio/$TRG_EN_GPIO/value echo "step 7: wait pps time reach trigger time + 1" let "TRGTIME = $TRGTIME + 1" while [ "$PPSTIME" -lt "$TRGTIME" ] do sleep 0.1 PPSTIME=$(cat /sys/class/pps/pps0/assert | cut -d '.' -f 1) done echo "step 8: clear trg_en" echo 0 > /sys/class/em_gpio/em_gpio/$TRG_EN_GPIO/value echo "basename $0 done" |
从示波器可观察到,上述脚本产生的TRG_EN信号,准确使能PPS脉冲产生与之上升沿完全同步的触发脉冲TRG_PULSE。
对分布式系统同步触发功能感兴趣的客户,可通过邮件support@emtronix.com与英创公司技术部门联系,以了解详细的实现代码。
-
Linux
+关注
关注
87文章
11324浏览量
209931 -
嵌入式主板
+关注
关注
7文章
6086浏览量
35468
发布评论请先 登录
相关推荐
基于ptp的分布式系统设计
中国唯一受邀出席2024 IEEE ISPCS企业!赛思ePRTC系统成5G时频同步网最强Buff!

分布式故障在线监测|高精度技术选用 行波特征 故诊模型

TSN时钟同步 | PTP对时案例演示——基于NXP i.MX 8M Plus
【技术分享】EtherCAT 分布式时钟简介

用于IEEE 1588和同步以太网的82P33814同步管理单元评估板数据手册






 工商网监
工商网监
评论