 英创信息技术ModBus通讯协议软件包简介
英创信息技术ModBus通讯协议软件包简介
ModBus通讯协议简介
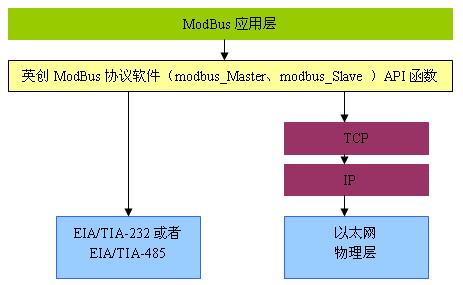
Modbus协议是一种已广泛应用于当今工业控制领域的通用通讯协议。通过此协议,控制器相互之间、或控制器经由网络(如以太网)可以和其它设备之间进行通信。Modbus协议使用的是主从通讯技术,即由主设备主动查询和操作从设备。一般将主控设备方所使用的协议称为Modbus Master,从设备方使用的协议称为Modbus Slave。典型的主设备包括工控机和工业控制器等;典型的从设备如PLC可编程控制器等。Modbus通讯物理接口可以选用串口(包括RS232和RS485),也可以选择以太网口。其通信遵循以下的过程:
●主设备向从设备发送请求
●从设备分析并处理主设备的请求,然后向主设备发送结果
●如果出现任何差错,从设备将返回一个异常功能码
英创ModBus通讯协议软件产品简介
英创公司推出的ModBus通讯协议软件产品主要应用于英创ARM9嵌入式主板环境,英创工控主板均带有丰富的串口、网络资源、通用GPIO接口等,同时具有强大的处理能力。结合ModBus通讯协议软件,就可非常方便地构成符合ModBus通讯规范的主控(Master)及设备(Slave)的应用平台。针对ModBus通讯的主从方式这一特点,英创公司的ModBus通讯协议软件包分为两个可独立使用的部分,即“ModBus主控协议软件”(简称modbus_Master)以及“ModBus设备方协议软件”(简称modbus_Slave)。目前英创ModBus通讯协议软件运行于WinCE环境下,均以C函数加静态LIB库的形式提供给客户。其主要特征如下:
●非常适用于实时的工业应用
●可以支持基于串口的ModBus通讯协议应用或TCP的ModBus通讯协议应用
●RTU传输模式
●支持大多数的Modbus功能码操作,包括对线圈、离散开关输入的位操作,以及对寄存器的字节操作
●支持广播地址
●可以灵活设置ModBus通讯的超时时间
●可以获取通讯中传输协议的错误代码的详细信息
英创ModBus协议软件通讯关系图
英创ModBus协议软件支持的功能码
| 功能码 | 描述 |
| 1 | 读单个线圈 |
| 2 | 读离散量输入 |
| 3 | 读多个寄存器 |
| 4 | 读输入寄存器 |
| 5 | 写单个线圈 |
| 6 | 写单个寄存器 |
| 15 | 写多个线圈 |
| 16 | 写多个寄存器 |
| 22 | 屏蔽写寄存器 |
| 23 | 读/写寄存器 |
软件基本使用方法
为了方便应用程序的使用,对不同的通讯介质保持一致的代码形式,英创所提供的ModBus协议软件(包括modbus_Master和modbus_Slave)中的API函数可以同时支持基于串口和TCP的Modbus协议,应用程序只需要在调用初始化函数时,用不同参数区分即可,有关参数的说明请参见相应的头文件:modbus_Master.h和modbus_Slave.h
1、modbus_Master的应用
作为Modbus客户端模式的应用,主要是准备请求并向服务器设备发送请求,并等待服务器的响应。在做此类应用开发时,用户可参考Modbus标准文献以及被控设备的通讯接口数据手册,直接调用英创提供的modbus_Master软件包提供了相应的操作API函数,来完成对服务器设备的访问和控制。在进行此类应用开发时,用户只需要包含modbus_master.h/ modbus_master.lib 即可。
2、modbus_Slave的应用
作为ModBus服务器模式的应用,主要需要实现了对于ModBus应用报文的分析与响应,但这还只是ModBus整个通讯的一部分,另一部分是还需要有对应用数据的访问,这部分的内容则需要用户自己来进行定义。为了方便客户的使用,在modbus_Slave软件包中通过函数指针的形式,实现了这些用户接口函数的自动加载,将用户应用数据处理和ModBus应用报文响应关联起来。用户只需根据需求定义这些接口函数来实现相应的功能,各个函数具体的定义是通过专门的一个CPP文件:DataProvider.cpp来实现。
由此可见在这类的开发应用时,需包含两个部分的内容,一部分是 modbus_slave.h/ modbus_slave.lib定义的API函数;另一部分是DataProvider.h /DataProvider.cpp定义的用户数据接口函数,其中接口函数需要用户在DataProvider.cpp中具体实现。
为了及时地响应ModBus应用报文,需要注意的是在程序设计时应设计一个线程反复调用modbus_Slave执行函数,该函数为阻塞模式。
举例如下:
(1)启动modbus设备方协议
hPort = mbusSlave_StartupServer( _T('*'), 1, 10000, mbusSlave_Interface );
或者
hPort=mbusSlave_StartupServer( _T('COM3:9600-8-1-0'),1,10000, mbusSlave_Interface );
(2)线程中调用执行函数Serverloop 响应请求
while( 1 )
{
// 调用执行函数,用于对ModBus报文的分析和响应。
result = mbusSlave_ServerLoop( hPort );
if( result!=0 ) // 检查是否返回错误
{
// 出错处理:本例为获取并打印错误代码的文本信息
wcscpy( szText, mbusSlave_GetErrorText( result ) );
i1 = wcslen( szText );
if( i1>0 )
{
wcstombs( strText, szText, i1 );
printf( ' error code: %s!\n', strText );
}
}
}
之前英创公司提供的ModBus通讯协议软件,均是以C函数加静态库(modbus.lib或libmodbus.a文件)的形式提供给客户。随着越来越多的客户使用,英创将ModBus通讯协议,特别是主控协议软件(简称modbus_Master)以动态库(modbus_Master.dll或libmbusmaster.so文件)的形式预装到英创嵌入式工控主板内核系统中,以方便客户应用程序的调用。预装Modbus协议的工控主板包括英创ESM系列所有主板(ESM6802、ESM6800、ESM335x、ESM928x等)。
相关参考资料
| 4~20mA电流环采集应用方案 | WinCE下的Modbus主控通讯协议软件 | |
| WinCE下的Modbus设备方协议软件 | 英创嵌入式Linux工控主板支持Modbus主控协议软件 | |
| Linux下的Modbus设备方协议软件介绍 | ESM6802支持Qt MODBUS程序开发 | |
| 在英创主板中预装Modbus通讯协议 |
-
Linux
+关注
关注
87文章
11322浏览量
209888 -
嵌入式主板
+关注
关注
7文章
6085浏览量
35457
发布评论请先 登录
相关推荐
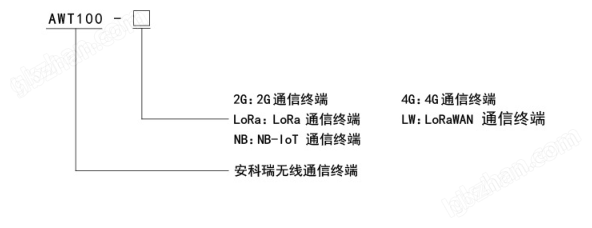
安科瑞AWT100-DP 无线通讯终端,支持串口MODBUS RTU协议
中科创达荣获2024年软件和信息技术服务优秀企业
串口屏Modbus通讯协议详解
Modbus协议网关简介

串口IEC101、Modbus调试软件、调试助手
苹果推出全新开源Swift软件包
ModBus Scan32模拟软件的使用方法
瑞萨RX MCU功能安全解决方案简介(3)Self-Test自检软件包

Modbus协议转Profibus协议网关接温控表与PLC通讯

TLE9879QXA40_eSL-BAS-EVAL未找到软件包的原因?
RT-Thread Studio添加软件包报错怎么解决?
RL78系列 Data Flash Library Type04软件包3.0版发布说明






 工商网监
工商网监
评论