 Make:it机器人入门套件的说明
Make:it机器人入门套件的说明
步骤1:行跟随机器人
回到家后,我迅速打开了并开始查看内容。该套件随附了构建两个机器人所需的一切,除了Arduino Uno和8节AA电池。
在入门套件中,您可以构建跟随机器人的机器人或行走机器人。我选择先建立跟随机器人的生产线。我花了两个悠闲的夜晚将机器人组装起来。组装说明很棒。机器人的所有零件都是一流的,机器人的框架是黑色粉末涂层金属角钢和扁平托架,类似竖立装置的样式。
唯一的塑料零件是电池盒,轮子和电动机箱。唯一的评论是,用成人大小的手拧紧角螺母和螺栓有点困难。但是,如果您正在协助儿子或女儿进行建筑步骤,这对小手将非常有用。一旦完成任何一个机器人的构建,手册中就会有一个链接,您可以在其中下载机器人的软件。在此下载文件中,有一些示例程序,自述文件以及传感器和电动机/传感器护罩的电路图。没有有关硬件的文档,该文档包括Arduino电机驱动器,传感器护罩。为了获得规格,您必须阅读原理图。
对于想要进一步进行机器人构建过程而不只是组装所提供的套件并运行所提供的软件的人而言,几乎没有提供任何信息。您必须通过阅读原理图自己弄清楚这一点,对于刚开始使用电子产品的人来说有点令人生畏。使用Arduino IDE可以很容易地将以下程序加载到Arduino中;如果您是高级用户,则可以使用几种可用的开发包之一,例如免费使用的Atmel Studio,这就是我所使用的。在我的下一篇文章中,我将进一步对提供的软件进行逆向工程。
追踪8节AA电池后,我的机器人可以开始运行了。 Make:it机器人套件甚至随附一张带有360度圆圈的重型白皮书,供机器人跟随的线使用。这些说明表明,跟随机器人的生产线随附的光学传感器对光线非常敏感,如果机器人无法正常运行以降低机器人周围的环境光。我将机器人放在黑圈旁边的白纸上,然后打开了机器人的电源。
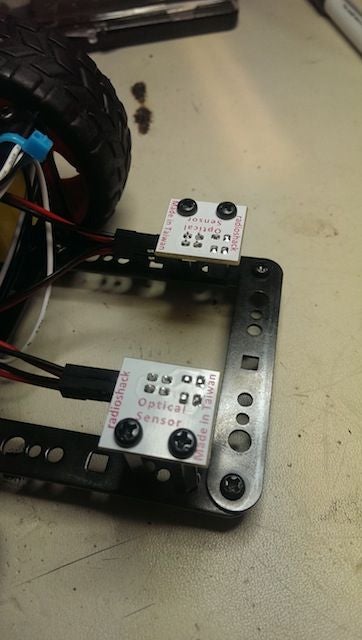
我的机器人只会在绕黑线消失之前将其绕圆绕约1/4。我累了好几次,但还是没有运气。我关掉了房间的灯,然后再试一次。仍然没有运气。我仔细检查了接线,一切都正常。但是机器人能做的最好的事情就是使它绕黑线圆大约1/4。是时候做些修改:这是股票机器人的图像,传感器暴露在环境光下。
步骤2:胶带?
我以前曾与追随机器人一起玩耍,并且有一个技巧可以将传感器屏蔽在周围的光线下。
所以我拿了一些胶带,从顶部盖住了传感器。
进行此修改后,机器人可以使其绕圆环的3/4处移动,环境光可以打开或关闭,虽然更好,但仍然不是很好。
第3步:传感器高度

是时候进行一些进一步的黑客攻击了。
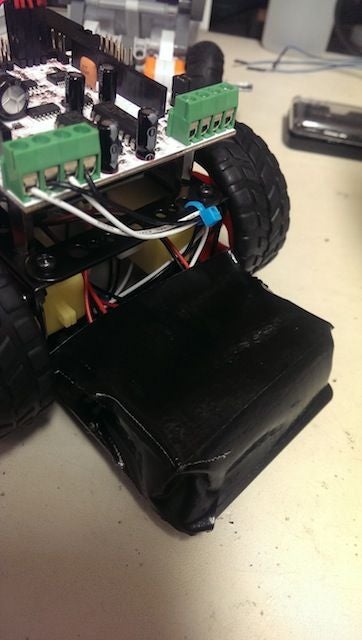
该套件还附带了行走机器人的一些其他部件。我注意到有一些较短的帖子(在手册中称为“ B栏”)。因此,我将较长的帖子更改为较短的帖子,以为这可能对光学传感器有所帮助。不会,这使情况变得更糟,但是变化不到1/4英寸。所以我尝试了其他东西。我将较短的帖子留在了机器人上,并为每个帖子添加了1/4个帖子。我是在Fry‘s Electronics本地购买的。 Radio Shack没有在商店中携带这些零件。
启动了机器人并成功了,打开或关闭机器人的环境光能够绕圈进行多次传递而不会松动。
责任编辑:wv
-
机器人
+关注
关注
211文章
28396浏览量
206979
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》

医疗机器人有哪些_医疗机器人有哪些应用
地瓜机器人发布一系列通用机器人套件
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系

Al大模型机器人
AMD Kria™ KR 260套件+ROS 2快速开发机器人解决方案






 工商网监
工商网监
评论