 战斗机器人的制作教程
战斗机器人的制作教程
第1步:
战斗机器人的重量等级为
跳蚤重量-75克
Fairy weight/UK蚂蚁-150克,美国蚂蚁重-1磅,甲虫重-3磅,螳螂重-6磅,爱好重-12磅,BotsIQ迷你级-15磅,羽毛体重-30磅
轻体重-60磅
中体重/BotsIQ大型体重-120磅
重体重-220磅
超重-340磅
最受欢迎的类别是美国蚂蚁重量。在大型机器人上建造一个小型机器人比较便宜。根据经验,请转到“构建器的数据库事件”页面,找到您附近或您附近的事件。
第二步:武器
有各种各样的武器战斗机器人的使用。但是,楔子往往会赢。如果您正在阅读本文,那么您很可能是第一次学习建筑商,这意味着您应该比专业人士亲吻更多。因此,这里只是一些常见武器的清单。
微调器
1。吧台旋转器-非常简单且坚固,仍然不是第一次builder
2。圆顶旋转器-功能强大,但制作起来有点复杂3。滚筒旋转器-能量巨大,但非常很难平衡
4。全身旋转器-壳体作为冲击器
举升机/脚蹼
1在机器人周围旋转。脚蹼-需要气动,并不容易,但是已经成功完成了多次
2。举升机-您可以制造复杂的四杆举升机,也可以制造单个枢轴举升机,这两种设计均已被证明是成功的
不寻常武器
1。破碎机-需要液压,这些设计很难制造,但正确实施
2是致命的。抓斗者-不言自明,抓起一个机器人,捡起它,放下它。很难制作。
3。斧头/锤子-并不是很不寻常,但是我必须把它放在某个地方。 不要 不要穿比业余爱好更轻的东西。
被动武器
(非常适合初学者)
1 。楔子-简单,运动部件很少,这是楔子获胜的事实
2。夯锤-需要更大的功率,比楔子更大的电池和电动机要昂贵得多。如果您制造夯锤,请使其快并确保其快速加速,那么您的竞技场就不会那么大。
3。犁/铲子-既有效,瓢也像破碎机盒一样从头开始逐渐变浅,您可以用它们做一个不错的“旋转杀手”。
请查阅Wikipedia以获得更深入的列表。
建议任何新来者。它们是成功且简单的,因此易于构建。如果必须使用主动武器,则可以选择伺服操纵的提升器。
步骤3:装甲
简短介绍在这里。需要记住的几件事。
1。使您的装甲越厚越好。只要确保不要超过重量限制。
2。正确使用木材可以成为很好的盔甲。 Robotica第一个赛季的冠军Run Amokused木顶装甲。
3。有足够的好,并且做完了。小型机器人的顶部装甲几乎不会刮伤,UHMW会使用时不要使用钛制的顶盖。
4。不要弄乱像lexanby这样的奇迹材料,用螺栓将它们紧紧地固定在您的底盘上,给它腾出的空间使其可以吸收其他武器的撞击。
第4步:机箱
我喜欢铝制机箱。它便宜,坚固,轻便。我可以轻松地将各个部分固定在一起。这就是为什么我使用铝。但是,有许多合适的选项。无论您做什么,都应尽可能地用力亲吻,并且不要离开舒适区。
焊接是将底盘固定在一起的首选方法,但这需要焊接!大多数人都没有焊接,包括我自己所以我坚持在铝条上钻孔并用螺栓将它们固定在一起。完成此操作后,我可以将钣金放在框架上以装甲。请记住,那只是制造机箱的一种方法。还有许多种构建机箱的方法。我不能说一种方法比另一种更好。只需确定在决定之前先检查所有选项。
第5步:电动机
有许多种不同的电机,用于不同的目的。要确定电机,请务必确保其他人使用它。如果它很受欢迎,则有充分的理由将它比其他品牌更好。流行的电动机的一个例子是Copal和‘Beetle’系列。通常,流行的电动机是串联的,其中某些电动机的齿轮减速比有所不同。她列出了受欢迎的传动系齿轮比。
4:1- 非常快速,低扭矩。这些电机非常适合用于快速楔块。
20:1-速度更快,性能更好的电动机,用于更尖锐的楔块。
60:1-良好的周围环境,将其粘贴在楔块上,粘贴在旋转器上,
120:1及以上-对于强悍的机器人,不是暴力而强大。我想说你可以用它们推动任何事情。
请注意,更大的轮子可以提高速度,但同时也可以降低加速度,请检查赛事场地的大小,以了解要使用的电池,轮子和电动机。
安装电动机时,请勿使用胶水,胶带或扎带。一定要使用专为该电机制造的螺钉和支座。
步骤6:电子调速器
名称几乎使它失去了ESC(电子速度控制器)来控制电动机的速度。选择ESC时需要牢记两件事。
1。峰值安培数-您的电动机应具有失速安培数额定值,这是电动机失速时需要的功率。 ESC也具有安培数额定值,您的ESC额定值显示它一次可以为电动机提供多少功率。请确保您的ESC的额定值高于电动机的失速电流强度,因此即使在推入匹配时,您的ESC也不会放弃。
2。重量-根据经验,如果有疑问,可以增加ESC的电流。但是有一个问题,具有更高安培数额定值的ESC更重!选择一个ESC,它要远远超过您的失速安培数,并且要轻巧,紧凑以适合您的机器人。
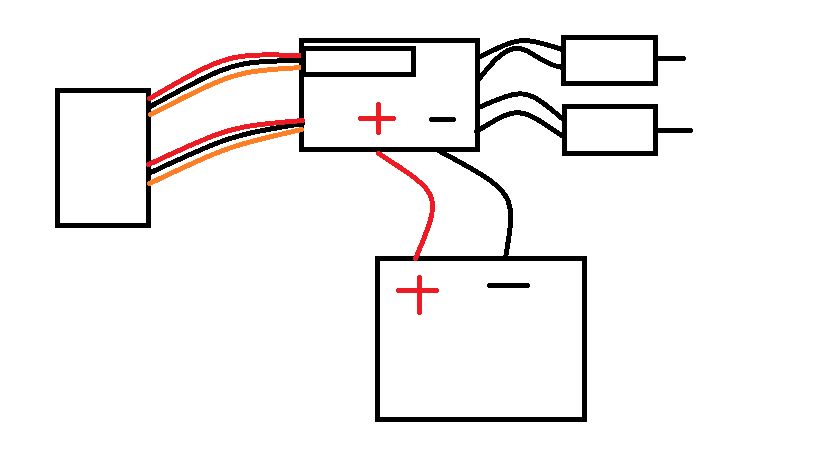
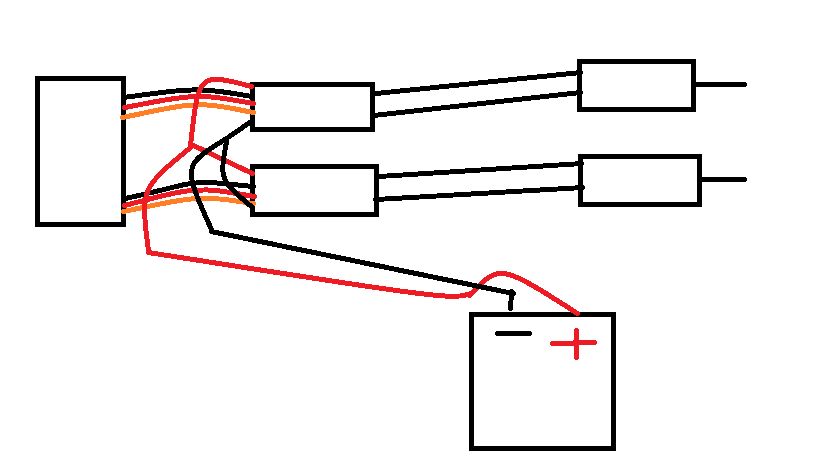
3。简便性-设置ESC的方法有两种,请选择您认为最擅长的一种。
为差动转向(即IE坦克转向)设置ESC的两种方法是战斗机器人的首选方法,分别是:点击1。两个单通道ESC:两个设置,您需要两个ESC! ESC需要像这样的一个通道。您必须使用单节电池来运行它们,然后像平常一样将它们插入接收器和电动机。(如图所示),如果您的发射器没有配备elevon混合选项。
2。一个两通道的ESC,我会第一次推荐这个。它们非常易于安装,只需要一个即可。
步骤7:发射器和接收器
不要略过。我说过, 请不要为此付出任何代价!
您的收音机是他们最重要的部分如果没有它,您的机器人就是100或200美元的垃圾。我再说一遍,不要便宜。我强烈建议购买2.4 GHz的发射器,因为没有晶体可搞乱。同时也不会干扰其他发射器。如果确实选择与2.4Ghz以外的其他发射器一起使用,请注意:
1。您需要晶体,这些晶体便宜,但由于
2,您将需要多个晶体。您不能使用与您的频率和晶体颜色相同的opponet。
此外,您还需要在所有 通道上进行故障保护的发射器和接收器。唯一不需要故障保护的机器人就是没有有源武器的反权重机器人,如果发射器没有说出它是故障保护器,则认为它不需要。即使使用没有活动武器的简单两轮驱动系统,如果您决定升级机器人,那么获得三或四通道发射器和接收器也是一项不错的投资。如果您发现自己喜欢建造战斗机器人并且想建造另一个 不要 购买其他发射器,只需获得另一个接收器,然后将相同的发射器用于两个机器人即可。
第8步:从何处获得所有这些东西
我不购买HobbyKing,您不应该购买HobbyKing。当我从HobbyKing购买了一些东西后,盒子里的东西和零件一起被毁了一半。其他几个人也对此抱怨。我重复请勿购买爱好!!!
HobbyKing有利于获得便宜的组件,而不是好的组件。
我使用的唯一的在线资源是RobotMarketplace,它们以低廉的价格提供优质的产品。什么,我听到什么?一个不错的两个通道60美元的ESC不便宜吗?好吧,我想提醒您, c 他 ap和战斗机器人不能同时使用,
除了RobotMarketplace之外,我还去了我的本地玩物商店和RadioShack。尽管RadioShack不携带爱好级的发射器和接收器,但它们仍然携带许多其他电子设备,热缩管,焊锡和烙铁。
步骤9:查找事件
检查构建器数据库。如果什么都没有弹出,那可能是您不走运。如果您住在加利福尼亚,则可以考虑参加RoboGames,这是一个常规的机器人活动,其中包括战斗机器人。但是,如果您附近没有事件,这不是不可能的事情,那么您可能必须开始自己的事件。举办您自己的活动时,请记住这些。
1)做广告-与当地新闻台联系并在城镇各处建立飞行人员。
2)安全-配备灭火器,备有急救箱,备有备用品。对建筑商和观众的某种保护。保护就像从屋子里观看一样简单,就像两个机器人在外面的桌子上将它杜绝一样。
3)玩得开心-您可能想要遵守所有规定,但不要为之烦恼。您甚至可以考虑对游戏进行一些改动。
4)组织结构-确保构建者知道发生了什么,没有消息的构建者就是不满意的构建者。
步骤10:命名您的机器人
您刚刚完成了构建非常酷的机器人的工作,并且在向Buider数据库注册事件之前,您意识到自己没有为自己的机器人命名。
根据机器人名称命名。 Spinna Killa不是楔形的合适名称。取而代之的是,Wedgster可能被证明是一个更好的名字。
现在,您已经选择了自己的名字,那么最好检查一下唯一的名字数据库,看看其他人是否已经有了该名字。给您的机器人起个有趣的名字,例如 BannannaSlug Smoothy 或 Electric莴苣。 总是要确保您的名字是原始的。
尽管机器人的最不重要的方面,名字仍然很重要。
步骤11:TOD-我的机器人
TOD代表破坏之物。我认为这是一个相当聪明的名字,会吓倒反对派。我在机箱上使用了废弃的锡,并用螺栓固定了所有其他部件。为了减轻重量,我在上装甲上钻了一些孔。制造TOD的价格相当便宜。变送器和接收器50美元,电动机20美元螺栓和螺钉10美元装甲-20美元
底盘-免费
车轮-免费
电池-免费
ESC-60美元《总体》大约110美元。
责任编辑:wv
-
机器人
+关注
关注
211文章
28445浏览量
207202
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论