 怎样用树莓派控制直流电机的方向和速度
怎样用树莓派控制直流电机的方向和速度

使用RPi控制直流电机
我们的下一个任务是使用树莓派上的python脚本和GPIO头控制直流电动机,这将在我们的脑海中产生一幅“机器人如何工作”的图景。您可以根据外面的天气来控制房间的风扇(因为您知道rpi会使用传感器)。完成所有这些操作将使您了解机器人技术的基本规则。
我们将控制一个直流电动机,该电动机至少需要400mA的电流才能正常工作,但我们的RPi只能提供接近20mA的电流。这意味着我们必须在外部连接直流电源。这不成问题!我们在市场上有6V和9V的小型电池。
警告:请勿将电机直接连接到Raspberry Pi,否则会损坏Raspberry Pi。
显然,我们将需要一个电动机控制器IC来控制电动机的功能(顺时针或逆时针旋转)。最好从L293D电机控制器IC开始。
要求:
·预先装有Raspbian的SD卡的Raspberry Pi
·面包板
·跳线(公对公,母对公)
·一台额定电压为6v的直流电动机
·一块6V或9V电池。
L293D
这是一个电机驱动器IC,我们可以一次控制2个电机。其引脚配置如下所示。它是一个16针IC,在一侧包括一个Vcc(上电),一个GND针,一个Enable针(用于打开和关闭电动机),两个输入对应两个输出。
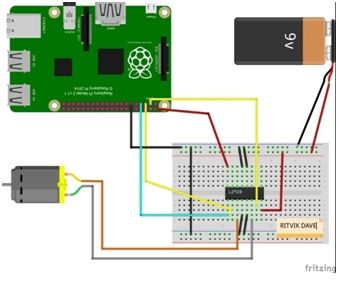
连接:
·首先将L293D的Vcc引脚连接到5V(也可以使用3.3V)
·现在连接地线
·使用GPIO-2、3、4来控制IC。(分别将GPIO-02和GPIO-03分别作为输入1和2)
·将GPIO-04连接到IC的相应使能引脚。
·现在终于将输出1和2连接到电动机的两个连接上,如图所示。
Python代码:-
导入RPi.GPIO作为GPIO
从导入睡眠时间开始
GPIO.setmode(GPIO.BCM)
Motor1A = 02
Motor1B = 03
Motor1E = 04
的 GPIO.setup(Motor1A,GPIO.OUT)
GPIO.setup(Motor1B,GPIO.OUT)
GPIO.setup(Motor1E,GPIO.OUT)
打印“电动机要启动“
GPIO.output(Motor1A,GPIO.HIGH)#以顺时针方向运行电动机
GPIO.output (Motor1B,GPIO.LOW)#将其设置为高电平以使电动机沿逆时针方向旋转
GPIO.output(Motor1E,GPIO.HIGH)#启动时应始终为高电机
睡眠(5)
打印“停止电机”
GPIO.output(Motor1E,GPIO.LOW)#停止电动机后
GPIO.cleanup()
上面的代码,您的电动机将开始沿顺时针方向旋转5秒钟。通过修改以上代码,您可以将其反转。现在我们可以用两个或四个电动机来制造汽车。
使用RPi控制直流电动机的速度
您知道在某些地方我们需要也可以控制电动机的速度。通过以上主题,您了解了电动机的ON-OFF控制,但这还不够吗?现在您应该在脑海中思考一个问题,即我们如何从RPi的GPIO引脚产生模拟电压。没问题,因为我们可以通过PWM(脉冲宽度调制)从中产生电压脉冲并控制GPIO引脚的输出电压。
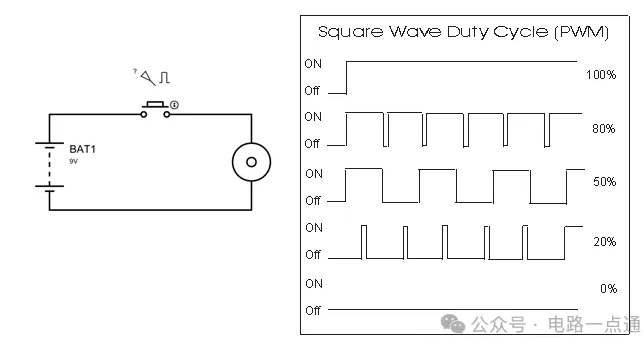
脉冲宽度调制
这是一个非常简单的过程,我们可以控制电源的电压频率。我们知道,PWM模块可用于RPi中的GPIO。
时间段= 1/频率
因此,如果我选择100Hz的频率,则意味着时间段为10m sec。 (电压被触发为“高”持续10m秒)。我们的电池为电动机提供9V的电压,为了降低速度,我们必须降低此电压。因此,如果要将速度降低一半,而不必将占空比(电压为高电平的时间段的百分比)更改为50。
由于供应给电动机的电压由电机驱动器IC-L293N的使能引脚,因此我们仅需将PWM应用于使能引脚即可改变速度。贝娄是理解PWM的python代码,需要上一主题中的上述连接(通过RPi控制直流电动机)。
》》》导入RPi.GPIO为GPIO#导入GPIO库。
》》从时间导入睡眠开始
》》》 GPIO.setmode(GPIO.BCM)
》》》 Motor1A = 02#将GPIO-02设置为控制器IC的输入1
》》》 Motor1B = 03#设置GPIO- 03作为控制器IC的输入2
》》》 Motor1E = 04#将GPIO-04设置为控制器IC的使能引脚1
》》》 GPIO.setup(Motor1A,GPIO.OUT)
》》》 GPIO.setup(Motor1B,GPIO.OUT)
》》》GPIO.setup(Motor1E,GPIO.OUT)
》》》pwm=GPIO.PWM(04,100)#配置启用引脚表示用于PWM的GPIO-04
》》》 pwm.start(50)#以50%的占空比启动它
》》》打印“前进”
》》》 GPIO.output(Motor1A,GPIO.HIGH)
》》》 GPIO.output(Motor1B,GPIO.LOW)
》》》 GPIO.output(Motor1E,GPIO.HIGH)
》》》 sleep(2)
##这将使电动机以50%的速度向前运行2秒。
》》》 pwm.ChangeDutyCycle(80)#将占空比增加到80
》》》打印“后退”
》》》 GPIO.output(Motor1A,GPIO.HIGH)
》》》 GPIO.output(Motor1B,GPIO.LOW)
》》》 GPIO.output(Motor1E,GPIO.HIGH)
》》》睡眠(2)
##通过提供80%的电池电压,电动机将以80%的速度反向运行2秒
》》》打印“立即停止”
》》》 GPIO.output(Motor1E,GPIO.LOW)
》 》》 pwm.stop()#从GPIO输出中停止PWM是必要的
》》》 GPIO.cleanup()
-
直流电机
+关注
关注
36文章
1710浏览量
70174 -
树莓派
+关注
关注
116文章
1707浏览量
105618
发布评论请先 登录
相关推荐
如何使用MOS管进行直流电机控制
有刷直流电机是什么?有刷直流电机的工作原理是什么?
直流电机的应用原理及控制原理是什么?
直流电机有哪些型号?如何分类的?
直流电机是什么 直流电机介绍及其工作原理
直流电机的转速与线圈的关系
直流电机正反转的控制方式
永磁无刷直流电机的控制方法
基于PSpice System Option接口的直流电机控制系统设计






 工商网监
工商网监
评论