 如何将简单的Roomba转换为可控制的流动站
如何将简单的Roomba转换为可控制的流动站
第1步:获得Roomba工具箱
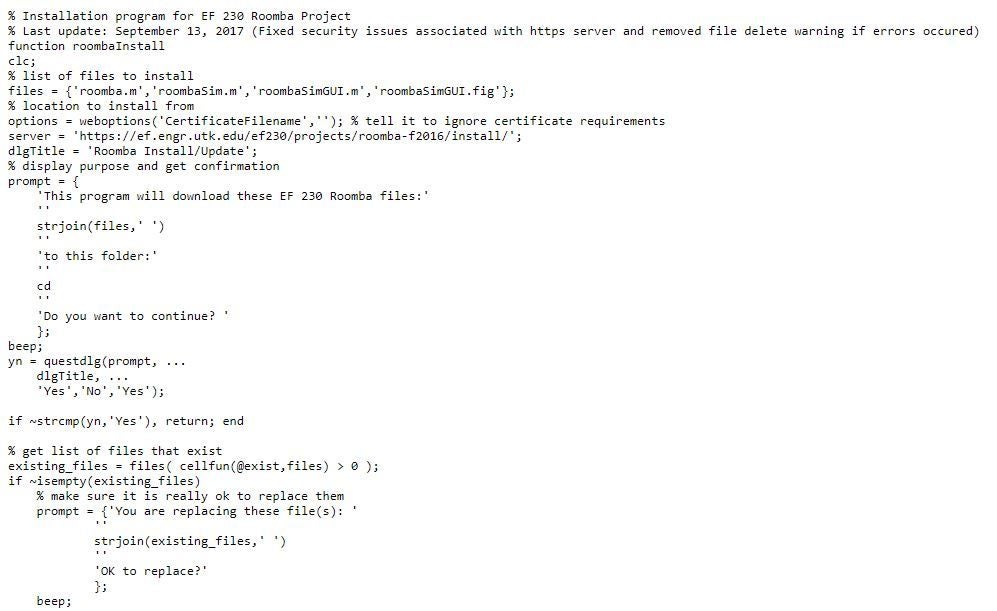
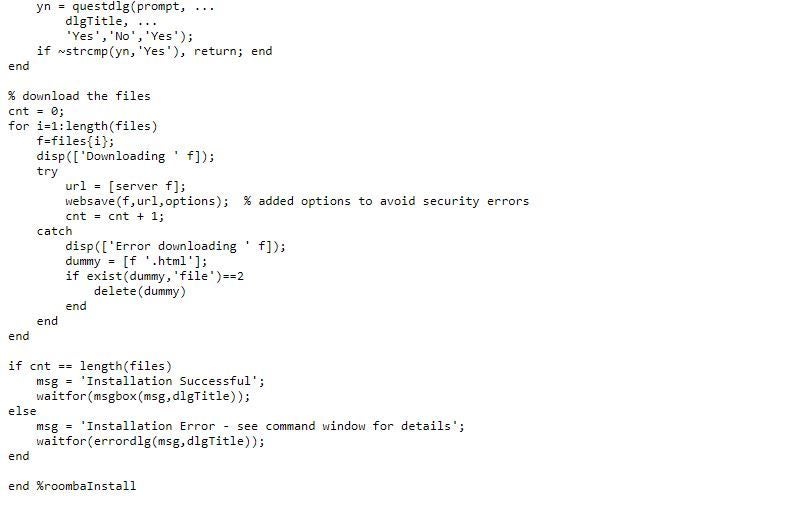
运行上面的代码以添加正确的工具箱,以便在MATLAB中连接到Roomba。
步骤2:连接到Roomba

安装Roomba工具箱后,您必须连接到伦巴。有多个通道可以通过蓝牙进行连接,但我们通过wifi连接。首先,通过按下“ Dock”和“ Spot”按钮10秒钟执行硬重置。将Roomba和操作设备连接到同一wifi网络。接下来,在“编辑器”窗口中使用以下命令连接到机器人:
r = roomba(Roomba的编号)
此命令完成后,roomba将位于
步骤3:连接到手机(遥控器)
通过手机控制Roomba可以达到一个水平Roomba的自主模式无法达到的精度。建立这种联系至关重要,因为在广阔的火星景观上,选择特定位置进行调查的能力至关重要。以下说明详细说明了如何完成此操作。
1。使用MATLAB Connector™在运行MATLAB的计算机和iOS设备上的MATLAB Mobile应用程序之间建立连接。
2。在MATLAB Command Window中,输入
connector(‘on’,‘password’,‘mypassword’);在最后一个参数中指定您自己的密码。使用默认端口。要检查连接器正在使用哪个端口,请启动连接器,然后查看它为测试链接显示的URL。在MATLAB Command Window中,单击显示的测试链接以确保计算机已准备就绪,可以进行连接。记下完成连接所需的DNS名称和IP地址。
3。在MATLAB Mobile中,选择“连接到计算机”。如果您先前已连接到云或其他计算机,请转到“设置”,然后点击“添加计算机”。
4。在“计算机”设置中,输入在步骤2中显示的DNS名称或IP地址。
5。在“连接器密码”设置中,输入您在中指定的密码步骤1.
6。保存设置,然后点击屏幕顶部的“连接”以开始连接。
7。在随后与同一台计算机进行的MATLAB会话中,在计算机和设备上启动连接。在MATLAB中,输入connector on。在“ MATLAB移动设置”中,在“连接到您的计算机”部分中,点击计算机IP地址旁边的按钮。
8。现在,您可以按照获取传感器数据流中的描述创建mobiledev对象并开始获取数据。
步骤4:颜色识别

这整个步骤都是在MATLAB中完成的。首先,找到适当颜色的图像数据,然后将Roomba设置为识别这些颜色。 Roomba识别适当的RGB值后,将输出消息或执行操作。例如,我们的Roomba用附属的黄油刀(或所需的防御物)刺伤外星人(红色),并在找到宇航员时将消息发送回基地(绿色)。
步骤5:测试机器人
该步骤可以说是该过程中最重要的步骤。确保遥控器正常运行,并确保Roomba上的颜色识别和其他默认传感器正常工作。不同的光照水平会影响机器人检测颜色的能力,因此这些输入可能需要调整。
我们的代码附在下面。需要注意的一件事是,不同的Roomba的转弯角度会有所不同,因此确定自己的角度非常重要。 RGB值也是如此。
责任编辑:wv
-
matlab
+关注
关注
186文章
2983浏览量
231257
发布评论请先 登录
相关推荐
基于TPS40055的设计在15安培时将12V总线转换为1.8V

大功率2000W双向逆变器方案开发控制板PCBA工作原理
请问如何将ads1256的spi信号转换为rs485信号?
如何将RS-485通信转换为TCP/IP通信

双向逆变器方案单片机控制原理
怎样将模拟量转换为数字量
如何将THS4541输出差分信号转换为单端信号?能否直接只使用输出的其中一端,比如OUT+?
请问如何将CD74HC154这个译码器的低电平输出转换为高电平有效呢?
如何将方波转换为正弦波
请问如何将.C的图片文件添加到VScode(PlatfromIO)生成的lvgh项目中?
如何利用GSG-721与ublox GNSS接收机实现RTK功能仿真?





 工商网监
工商网监
评论