 远程控制自动地板清洁机器人DIY图解
远程控制自动地板清洁机器人DIY图解
步骤1:准备
步骤2:零件和工具
组件:-您可能会很难找到我用过的所有零件
.2x DVD播放器,
某些胶合板,
一些电线,
PCB,s,
冷却风扇,
旧喷墨打印机,
碳过滤器,
传感器,
鼓风机,
木材用胶水,
焊接,
胶体电池12V 7Ah,
一些带螺母的螺钉
铰链
弹簧
旋转轮
密封带
LM350的散热器,
一些电子组件:
2个Buz11 Mosfet,蜂鸣器,2/16 HD44780显示屏,100nF陶瓷电容器,2x7805稳压器,8x快速二极管1N4149,Atmega 32 ,为其提供一些LED和200欧姆电阻器
一些金引脚,100k欧姆电阻器,4017计数器,1k欧姆电阻器,BC-548晶体管,2x10k电位计7xButton,HC-05蓝牙模块,HCSR-04声纳
Sharp GP2Y0D810Z0F,Pololu#2460、1000uF和220uF电解电容器,6个ARC-2连接器,LM350稳压器1uF电解电容器,240欧姆电阻器,芯片插座,模拟伺服,10k欧姆电阻器,
您可以检查原理图上电容器和电阻器等元素的确切数量。
工具;
Dremel
手锯
螺丝刀
木锉
用于焊接的燃烧器
钳子
热胶枪
等
第3步:一些硬件和框架
我使用了6毫米胶合板,这使我可以制造坚固轻巧的机器人框架。有些零件是用胶水连接的,有些零件是用木螺钉连接的。以后,您可以按自己喜欢的方式对其进行涂漆。
第4步:电动机
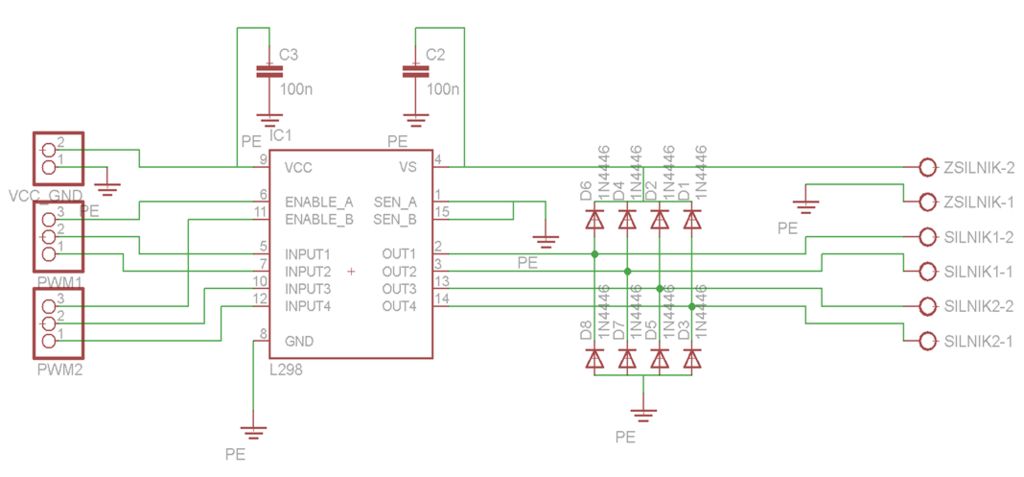
机器人由两个带DVD播放器齿轮的高速直流电动机驱动-它们有足够的扭矩来移动重约5kg的机器人。我使用热传递方法为电机控制器制作了单独的PCB。电机控制器采用L298N双H桥制成,每个通道最多可处理2安培。我可以使用微控制器生成的方波进行可变填充,从而控制发动机的速度。车轮和轴由乐高积木制成,如上图所示。此外,冷却风扇还用于冷却发动机过热。在机器人的前面,我使用了一个旋转轮,它可以使机器人向各个方向转动。
步骤5:吸尘器
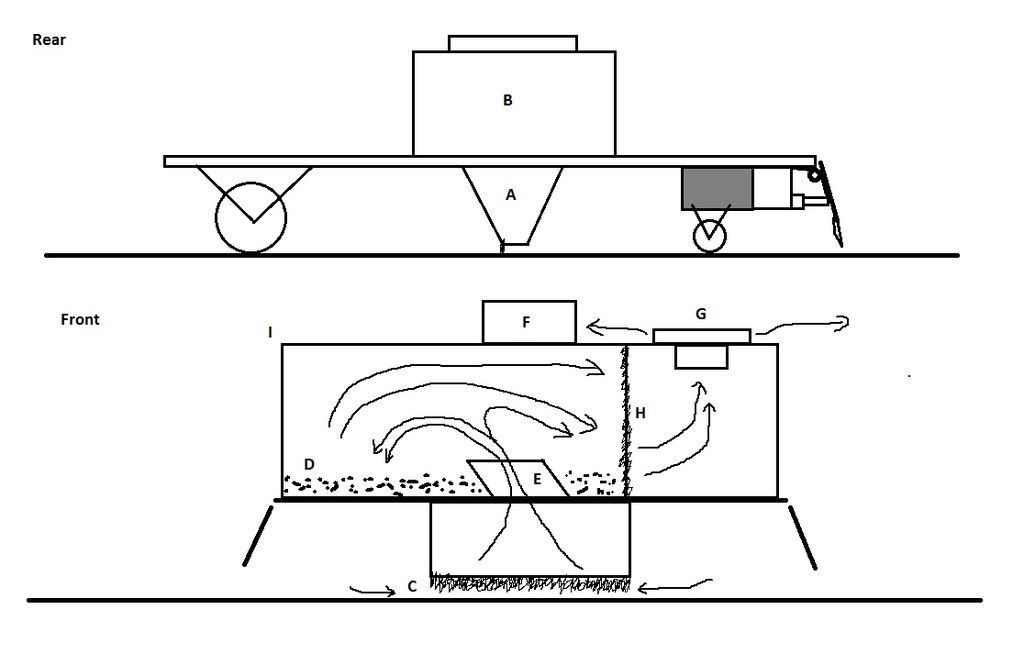
真空吸尘器是我的机器人最重要的部分,它可以清洁每个地板。
的:
真空室(B)
抽吸元件(A)
地板和抽吸元件之间的密封(C )
带散热器的鼓风机调速器(在LM350上制造)(F)
鼓风机(G),
带盖,您可以排空真空泵的真空室。灰尘和其他杂质(I)
碳过滤器可阻止灰尘(H)
托盘中较大的杂质(D)
用于引导气流的元件(E)
工作原理:
灰尘和其他杂质被吸入抽吸元件,然后进入真空室。我使用了用于引导气流的元件(E),该气流可将较轻的杂质与托盘中沉降的较重杂质分离(D)灰尘被碳过滤器(H)阻挡。鼓风机(G)产生足够的吸力,从而使操作平稳
箭头在上面的插图中说明了气流的方向。
步骤6:主动拖把
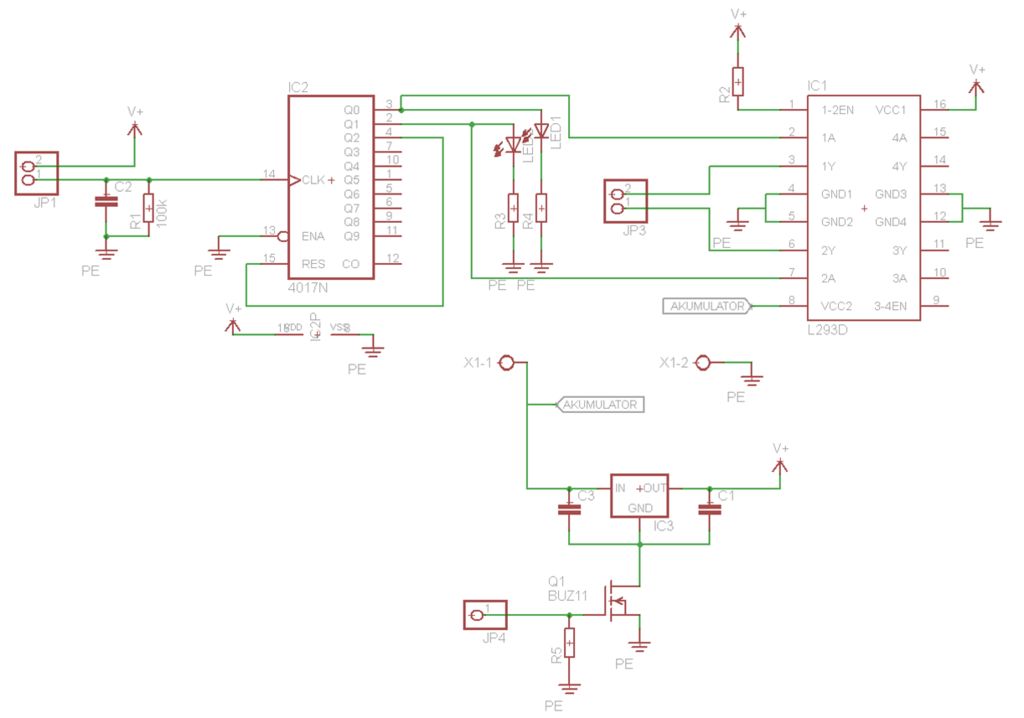
使用过的系统可以准确,高效地擦拭地板。整个机构是由喷墨打印机的加工部分制成的。我不得不缩短这部分并再次焊接。工作原理:拖把通过连接到电机的皮带向侧面移动(从边缘反弹)。有源拖把驱动器非常简单,它使用4017集成电路,您可以在上图中看到原理图。
步骤7:电池
《我决定使用大型汽车电池,因为它易于充电,容量高(7Ah)并且非常便宜。此解决方案也有缺点:体积大且笨重,因此我不得不使用更好的引擎。机器人可以在充满电的电池上工作约6个小时。锂离子电池也是一个不错的选择。
步骤8:传感器简介
我的机器人配备了以下传感器,但它们非常昂贵,并且需要专用的充电器。使其可以在全自动模式下运行:安装在伺服上的HCSR-04声纳,红外接近传感器(pololu#2460),夏普GP2Y0D810Z0F数字红外接近传感器,某些保险杠。在接下来的步骤中,我将展示该传感器的工作原理以及应该做什么。
步骤9:保险杠和厚地毯传感器
1个保险杠(碰撞传感器)-
每个自主移动机器人中的主要传感器之一。机器人可以检测到与其他传感器未检测到的物体发生碰撞,从而防止发动机燃烧。 CleanBOT配备3个保险杠区域:
A-左保险杠
B-右保险杠
C-耦合前保险杠
当机器人与障碍物碰撞时,它会执行以下练习:
C *前部碰撞-机器人后退,然后使用超声波声纳进行测量以找到最佳位置*,然后继续向前移动直到到达下一个障碍物
A *左侧碰撞-机器人向右旋转90度,然后继续向前移动直到到达下一个障碍物
B *右侧碰撞-机器人向左旋转90度,然后继续向前移动,直到到达下一个障碍物
2。厚地毯传感器
机器人检测到可能导致机器人阻塞或引擎燃烧的厚地毯时,会停止并返回。原理很简单:它是一条连接在前保险杠(E)上的弯曲导线(B)。移至地毯后,将电线压在安装在铰链(A)上的保险杠上,该保险杠按下按钮(C)。在所有的保险杠中,我都使用了附加的弹簧(D),该弹簧会触发保险杠回到其先前的位置。
步骤10:楼梯传感器
我使用锋利的GP2Y0D810Z0F来检测楼梯。敏锐的传感器可以检测到跌落,以防止机器人掉下楼梯。当地板在传感器视场中时(在输出为低状态时),它是在d = 2 《-》 10cm范围内工作的数字传感器,当传感器检测到楼梯时,输出中的状态将为高。一旦检测到楼梯,机器人将立即返回安全距离,然后它将继续运行。
步骤11:将声纳安装在伺服系统上
使用附在声纳上的伺服器,我可以进行180度范围内的测量。
机器人可以确定沿任何方向与障碍物的距离,然后决定哪一侧有更多“空间”,并开始开车到这个地方,直到找到下一个障碍。在上面的图2上,机器人测量到3个距离d1是最长的距离,因此机器人ll将越过该距离。测量次数取决于您编写的程序。
步骤12:红外接近传感器
Pololu#2460 38kHz是一个附加的传感器设计用于检测超声波声纳未检测到的障碍物,它提供了对机器人前方区域的更多控制。使用此传感器,还可以检测到立在地板上的小障碍物,例如电缆和其他扁平物体。
步骤13:显示
LCD显示器与微控制器耦合在一起。屏幕上显示所有对用户重要的消息。例如,当您通过蓝牙显示启用自动模式时,显示以下消息:“启用自动模式”
步骤14:蓝牙和智能手机应用程序
通过HC-05模块已实现了带有智能手机的蓝牙,该模块允许使用串行传输与微控制器进行通讯。
smatphone上的应用程序以下列方式工作:按下按钮,智能手机发送一个字节的信息(一个字符),该信息由微控制器接收。微控制器还将相同的字节发送回智能手机以检查传输错误。可以执行以下操作:与机器人连接和断开连接,手动控制,启用和禁用:自动模式,活动拖把,吹风机。
步骤15:机器人的大脑
主PCB基于8位微控制器AVR Atmega32,它具有自己的电源部分。我也使用热转移方法制作了该PCB。程序是用C(GCC)编写的,它完全基于中断。为了接收和传输数据到蓝牙,我使用了内置的USART硬件。微控制器以内部谐振器8 Mhz的频率计时。转向计时器和伺服的PWM信号由硬件计时器生成。声纳的脉冲长度也可以通过硬件计时器进行测量。鼓风机由Mosfet晶体管直接从主PCB驱动。
-
机器人
+关注
关注
211文章
28627浏览量
207954 -
远程控制
+关注
关注
4文章
637浏览量
34961
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
倍加福超声波传感器在清洁机器人中的应用
【开源项目】你准备好DIY一款功能强大的机器人了吗?
精准定位,深度清洁:揭秘工厂清洁机器人的核心技术
爱普生SGPM01助力智能泳池清洁机器人导航方案

高效节能,普渡清洁机器人引领绿色清洁潮流
商用清洁新纪元:为何商用清洁机器人成为必选,及挑选指南
商用清洁赛道,普渡清洁机器人如何玩出新花样?
工业机器人数据采集远程监控平台是什么
如何使用PLC控制机器人
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
EPSON助力智能泳池清洁机器人导航






 工商网监
工商网监
评论