 怎样使用FPV构建无人机
怎样使用FPV构建无人机
步骤1:FPV是否?


FPV,但这并不意味着您应该跳过视线,因为这是非常必要且良好的实践,这也将帮助您FPVing 。..
但是,等等,这是什么?
FPV意味着在无人机上安装了一个小型摄像机和一个视频发射器(VTX),您可以通过护目镜驾驶它,以鸟瞰或更精确的第一人称视角查看无人机。
线路视距飞行的意思是您从视线观察无人机并进行控制,我认为,像这样飞行比较困难,但是学习如何飞行很重要。
此外,FPV中的飞行是不同的体验,您会忘记自己在地面上而成为无人机。
有时您自己一个人飞翔,并充满了一些体外体验。..
但是,在FPV中飞行会更昂贵,还有更多零件和配件可供购买。..
步骤2:框架
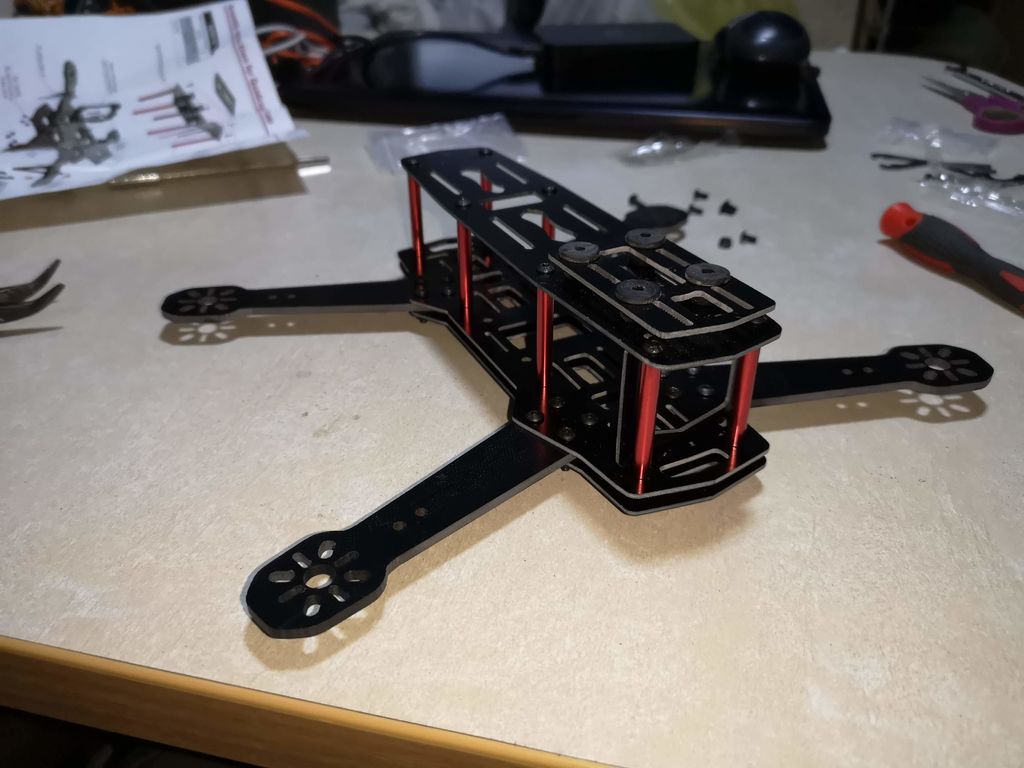

框架的形状,尺寸和材料多种多样。
通常,您可以用几乎所有东西搭建自己的框架,并且它会飞起来,互联网上充满了由木头制成的无人机。 》,纸板,塑料,汤匙,直尺,乐高玩具和许多其他东西。..
M您的第一个自行建造的无人机是用木头制成的,它的问题是它非常脆弱,并且需要时间和练习来学习如何控制无人机。刚开始时,您可能会感到很迷恋,特别是如果您要尝试将那些无人机带到极限,因为那些自行建造的无人机可以做很多杂技并且可以达到高速……
因此,当您弄断了木制无人机后,您可能想切换到更坚固的东西。
然后是塑料无人机(如F330机架),它比木制无人机更坚固,但是可能与片状碳纤维框架的价格相同,从而将碳纤维框架带入另一个层次。..
碳纤维框架除以道具长度2‘’,3‘ ’,5英寸等。
最常用的是5英寸,最近是3英寸和2.5英寸,这虽然有点时尚,但也受到技术变化的推动。
我最终使用的是QAV250框架(5英寸),该框架是芯片,可以在EBay和Banggood上轻松找到,但是最近,我决定将QAV250制动得很轻松之后转向更坚固的碳纤维框架
步骤3:RC发送器


关于变送器,有很多事情要知道,削片机和昂贵的变送器之间有很大的区别。..可以添加一些模块以改善范围,有些可以与之通信您并警告您有关无人驾驶飞机的相关内容,例如信号丢失,例如,对于手腕有一种不同的感觉以及它们的准确性。..
现在,我只乘坐削片机,首先,我乘坐的是未知的发射器-然后,我购买了二手RadioLink,现在我主要使用FlySky,它是功能最强大的芯片发射器,但是,它遇到范围问题,最近订购了Jumper T16。
您应该知道的是,
-您必须在列表中有 6个频道。
-发射机的类型不同-模式1,模式2等,模式表示油门杆在变送器上的位置,在左侧或对,现在您可能认为应该将它放在优势手上,嗯。..也许。..但是您应该知道,大多数无人机飞行员都使用模式2 ,如果您选择其他选项,后来被发现是一个困难,并且不了解您所习惯的东西可能会变得困难得多。
-目前,最常用的发射器是FrSky Taranis X9D,但最近,它成为获得Jumper T16的更明智的选择。
此外,这两家公司(FrSky和Jumper)之间也存在争斗。
*模式2在左侧操纵杆上有油门,在右侧操纵杆上有偏航和俯仰和滚动。
* *注意要购买的模式,很难更改发射器的模式
步骤4:接收器
接收器是与发射器通信并将其传递给飞行控制器的部件。
接收器将位于列表3中引脚/连接,GND,Vcc,信号。
过去,每个通道都会通过自己的线路(并行)传递到FC(飞行控制器),但如今,通常是通过更快的电子设备和更智能的协议来传递
接收器通常在购买新产品时随发送器一起提供,而不是在购买二手产品时总是如此。
并非所有接收器都能与所有发送器通信,每个公司都开发了自己的接收器通讯协议,有时多于一个,因此购买接收器时,应检查它是否与您拥有的发射器相匹配。
请注意,我知道的唯一可以与大多数(如果不是全部)接收器通信的发射器是Jumper T16和Jumper T8SG支持多协议。
如今,大多数接收器都通过 S-BUS 协议与FC(飞行控制器)进行通信,还有更多这样的 I-Bus 和其他,请确保您购买的接收器能够与FC(飞行控制器)通信
*连接接收器(以及您要连接的每个板),请注意接收器的额定电压,
为它提供太低的电压会导致工作问题或根本无法工作,为它提供太高的电压会炸掉它并毁坏电路板。
**大多数接收器都使用 5v
第5步:FC-飞行控制器


飞行控制器(FC)是无人机的大脑,它采用加速度计和陀螺仪之类的传感器紧凑。
它接收来自传感器的所有数据,以及从无人机飞行员通过发射机和遥控器获得的输入。接收器,并将所需的速度从每个电动机输出到每个ESC,从而使电动机以所需的速度转动。
通常,FC分为几代,目前我们是第7代,但仍然是大多数无人机请使用3rd和4th。
而且,飞行控制器有多少RX/TX(输入/输出)。
您为什么需要它?很好地用于连接GPS,接收器,VTX Smart音频,遥测等外围设备。
另一个区别是FC处理数据和滤除噪声的方式。
当今大多数FC在开放式环境下工作,名为BetaFlight的源软件,但是还有Kiss and Ardupilot之类的东西。
这里是我要使用的FC的列表,首先是我不推荐的FC,然后是我使用的FC:
不推荐使用:
Naze32-第1代FC,曾经是一个不错的FC,并且已经使用了很多年,但是现在非常有限,并且不能让您在业余爱好。
OMNIBUS F4-多功能飞行器被认为是不错的FC,但是我对USB连接太容易掉线感到不满意。
HGLRC Flame-我对它的使用感觉很差,在飞行过程中垫子掉了
建议:
FlyWoo F405-我仍然在四边形(无人驾驶飞机)的数量上使用此,飞行平稳。
DYS F4 ver2- DYS被认为是业余爱好中的好品牌,我仍在使用此FC,没错。
JHEMCU F7 AIO-最便宜的第七代双陀螺仪,飞行良好。
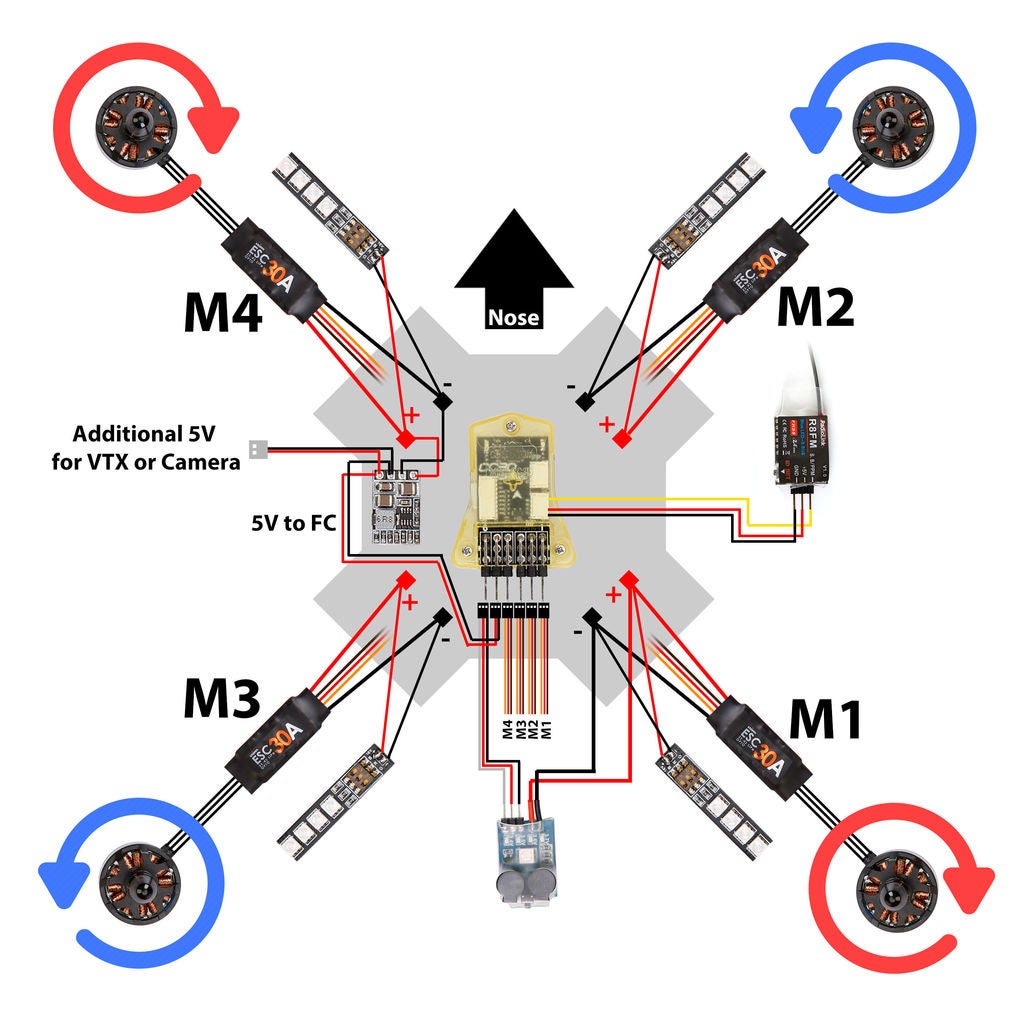
第6步:PDB-配电板
无人驾驶飞机消耗很少的电量,它使用的是RAW ESC和电动机的电池电压,它为飞行控制器(FC)使用5v,有时为摄像机使用3.3v 。..
如今,大多数FC与配电板(PDB)结合使用),但并非总是如此,在这种情况下,您需要一个PDB来处理所有级别的电源。
我只能使用Matek PDB,但通常,您应该在清单4中拥有高功率ESC的连接,FC,接收器,VTX(视频传输器)等的5v连接很少。
如果您的摄像机为3.3v,则有时需要5v甚至更多的电流才能实现3.3v连接。
PDB还将处理与电池的连接,今天的标准是XT60连接。
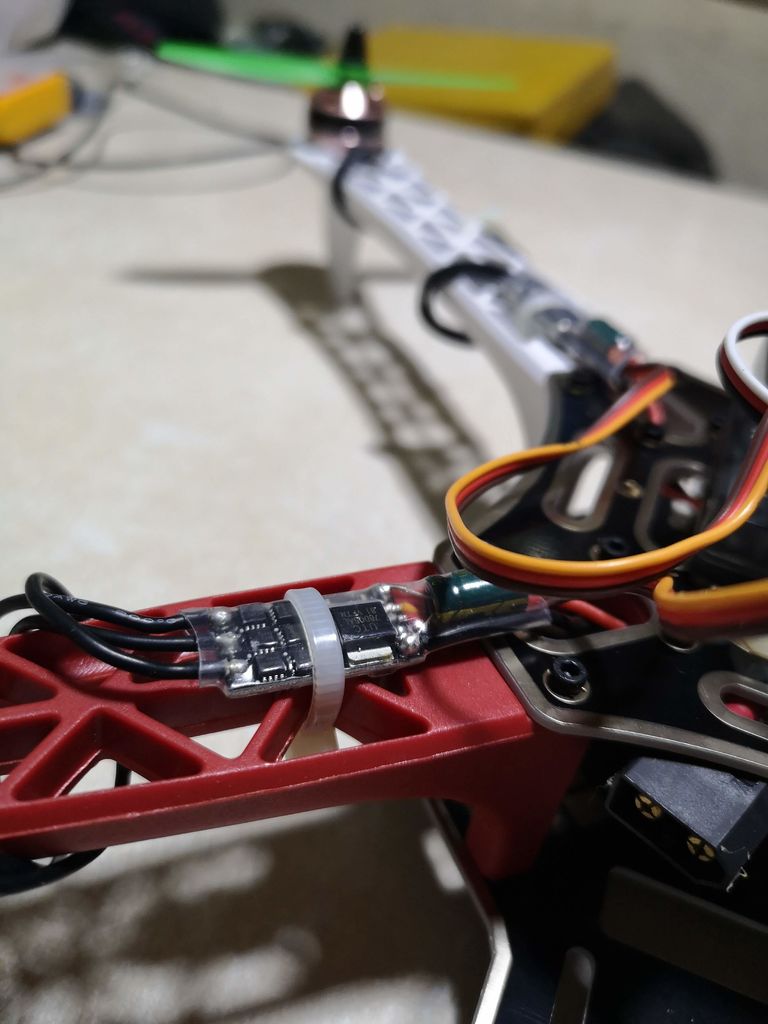
步骤7:ESC-电子速度控制器
随着无刷电机变得越来越好和越来越小,无人机行业已经朝着它发展,但是不仅要连接正负号,并通过有刷电动机通过电压对其进行控制,还需要一个ESC电调速器来控制其速度。
同样,每个电动机都需要一个ESC您通常有4个。每个ESC都带有3条连接到电动机的导线,而VCC和GND分别连接到PDB或FC上的RAW电池电压,以及数据连接在相应的电动机连接上在FC上(有时会有额外的GND,您可以将其添加到主接地线并将它们焊接在一起。
您还可以在一块ESC板上使用一个4英寸的ESC板,这样可以节省您的空间(例如,在小型无人机中),并避免了许多连接和电线的麻烦,但是,有时ESC出现故障,需要进行更换,在这种情况下,您需要交换所有四个而不是一个。
ESC的额定等级如下:
-额定电流,表示ESC可以处理多少安培。
知道您需要多少电量取决于电动机,四边形尺寸和所使用的电池。
通常,对于5英寸的四边形来说30A就足够了。
-协议-ESC几乎没有办法“交谈” ”与飞行控制器(FC),PWM,单发,多发,D-Shot
如今,大多数无人机都在D-Shot600列表中使用(600是其使用的速度),但飞行控制器(FC)和ESC应该能够使用您选择使用的协议。
您应该注意到ESC是BLHelli或BLHelli_s(软件闪烁在其中)。
我是使用HAKRC 35A BLhelli32和BLhelli_s 30A,但有很多选择。
第8步:电动机
电动机标有4位数字和一个KV编号。
KV是电动机在无负载的情况下每伏特旋转的匝数,因此,较高的KV将旋转得更快,但转矩较小,而较低的KV将旋转得更慢,但转矩更大。
其他4位数字表示电动机的直径和内部绕组的高度。
为设置选择正确的电动机有时会反复尝试,但通常为5英寸的四角将使用2300KV电动机。
我并没有做太多的电动机实验,我主要使用Race Star 2205 2300KV
第9步:锂电池
为什么Li-Po可以将高电流提取到当前饥饿的电机中,但是Li-Pos可能很危险,应谨慎处理并以出现故障或人身伤害的最初迹象报废。
切勿将它们完全耗尽,也不应过度充电,也不应将它们单独充电或过夜充电。锂电池
在无人机范围内,我们使用的是1s/2s/3s/4s/5s或6s电池。
数字代表电池中的锂电池数量,这会影响电池电压和安培能力。
您应该注意到您的电动机和ESC电池座额定值,并且永远不会提供超过其能承受的极限,因为您会燃烧它。
第二个是每小时可以供应的安培数,大多数无人机使用1300或1500毫安时,请注意,增大重量会增加重量。
当今的大多数无人机都使用4s电池,但是最近转向6s电池。
步骤10:道具-螺旋桨
道具除以桨叶数量和它们制成的材料。
道具的设计很多,要由自己来决定。
我建议您从3或4刃的道具开始,因为它们更稳定
此外,请确保尺寸正确,每个镜架都围绕道具尺寸构建,因此5英寸的四角镜架将使用5英寸的道具。
4个刃状道具
3个刃状道具
道具上的数字表示道具的大小和间距,例如5043为5英寸,间距为4个刀片和3个刀片
步骤11:VTX-视频发送器
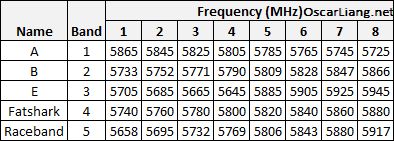
在这里,它可能会变得复杂,因为可以在VTX(视频传输器)上添加各种功能,例如Smart Audio,这些功能不在此Instructable的范围之内。
VTX连接到VCC(根据其上的V额定值-通常为5V)和GND,以及连接到飞行控制器(FC)上的VO(视频输出)。
它会拍摄从摄像机生成的视频,从FC中添加OSD(屏幕显示),然后通过空中将其传输到您看到的护目镜(确保VTX和护目镜在同一频道上)
从一个足够好的VTX开始非常重要,因为您可以管理其他东西而不是最好的开始,但是看不到您要飞的地方令人沮丧和成问题。
我尝试了很多便宜的劣质VTX,让我无法自拔并卡在树上。..
最终,我发现Everyine 805 VTX相当好,而且不太膨胀。
您应该注意天线连接器,而不是SMA或RP-SMA,您需要的天线是其中之一。
最常用的RP-SMA
步骤12:摄像机
作为VTX,相机也应该是一款不错的相机,因为您想看到自己在哪里飞行。
各种各样的摄像头,微距镜头和分体式相机,更不用说DJI HD系统正在改变整个爱好(不过我会再等一会儿再解决一些问题,然后再购买)。
我主要使用RunCam Eagle 2 Pro并与它玩得很开心,还有Caddx Turbo Eos2 1200TVL
摄像机已连接到FC或PDB上的VCC,但请确保已将其连接到正确的V额定值,即5v或3.3v或更高,地线已连接到GND。
视频步骤13:最后-护目镜
,已连接到FC VI(视频输入)。
直到最近,护目镜世界还是由FatShark统治,但是最近却淘汰了一些好的竞争对手,并诅咒DJI HD系统。
护目镜世界是分为:
-Box护目镜,它是一个大盒子中的一个屏幕。
-但大多数飞行员更喜欢两个较小的屏幕,每个眼睛一个。
我说过世界是主导作者:FatShark HDO,但最近SkyZone 03O更好,Aomway也很好。..
您应该确保护目镜具有:
-DVR-在护目镜上记录飞行非常重要
-分集-是两种使用两种天线并自动选择更好接收效果的接收器方法。
责任编辑:wv
-
无人机
+关注
关注
230文章
10454浏览量
180842
发布评论请先 登录
相关推荐
科技防线:无人机干扰系统如何保障空域安全 特信无人机反制
无人机反制系统:构建空中安全的智能防线!特信无人机反制
特信无人机反制系统:构建全方位低空防御网络的科技先锋
无人机信号传输技术的原理及分类
演唱会无人机乱飞,无人机反制枪守护安全|特信无人机反制
高清画质、低时延,图传技术如何展现FPV穿越机的“速度与激情”






 工商网监
工商网监
评论