 如何制作线跟随机器人
如何制作线跟随机器人
步骤1:物料计划
对于本教程,我们需要以下项目:
1。 Arduino UNO
2。 2WD智能汽车底盘2轮
3。 Arduino微型直流电机驱动器双H桥PW控制(L293D)
5。电池
6。双面胶带
7。导线
8。跳线
9。黑色胶带
步骤2:硬件安装
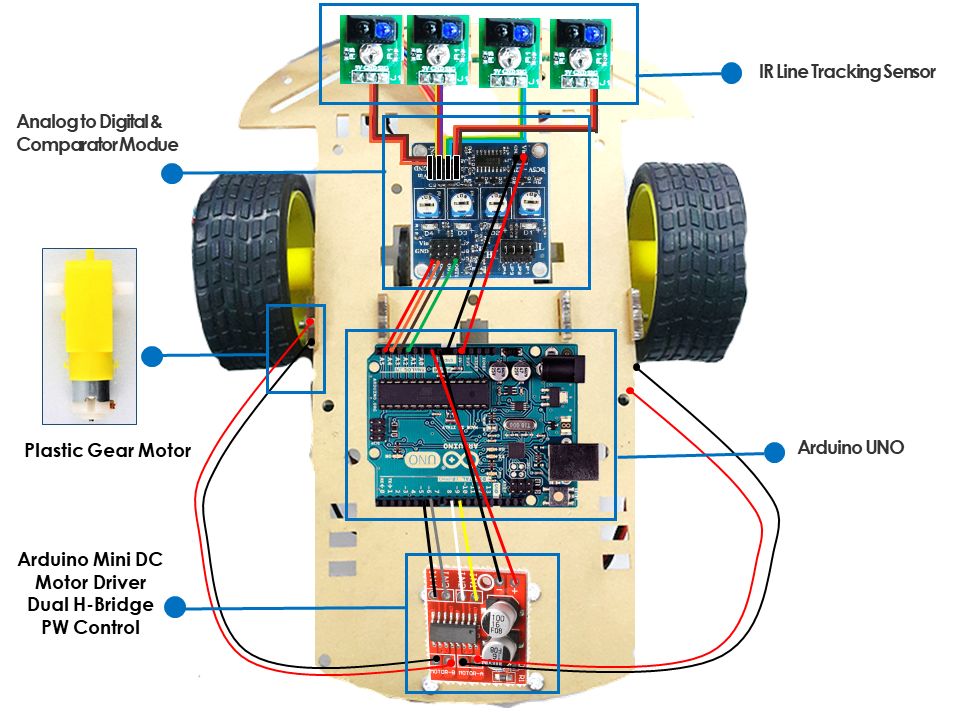
1。组装2WD Smart Car Chasis 2车轮
2。将红外传感器连接到模数和比较器模块
IN1》红外传感器1
IN2》红外传感器2
IN3》红外传感器3
IN4》红外传感器4
3。然后,将输出引脚连接到Arduino UNO模拟引脚
OUT1》 A2
OUT2》 A3
OUT3》 A4
OUT4》 A5
4。在Arduino UNO中将Vin连接到5V,将GND连接到GND
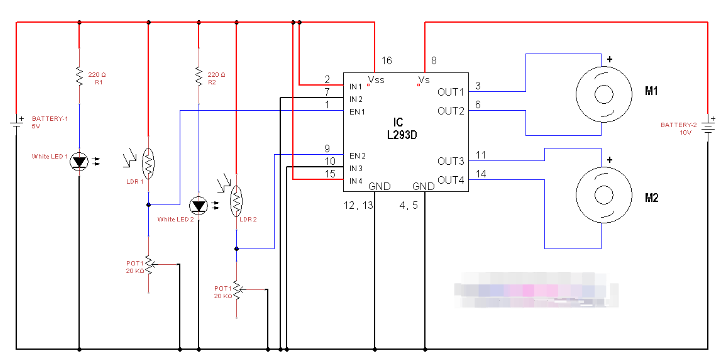
IN1》 D10
IN2》 D9
IN3》 D6
IN4》 D5
6。将两个电动机都连接到电动机驱动器上
电动机A》右电动机
电动机B》左电动机
完成连接后,使用以下命令将Arduino连接到电源USB电缆。
步骤3:插入源代码
1。下载测试代码并使用Arduino软件或IDE打开它。
2。确保已选择正确的板和相应的端口。 (在本教程中,使用的是Arduino Uno)
3。然后,将测试代码上传到Arduino Uno。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
29029浏览量
210104
发布评论请先 登录
相关推荐
【书籍评测活动NO.58】ROS 2智能机器人开发实践
从 PC 到智能手机,下一个更大的计算平台是什么?
最佳答案可能是 机器人 !
如果设想成真,则需要有人为机器人“造脑”,即打造适配的计算平台及操作系统。
就像以计算机为平台的计算机时代,和以手机为
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
认识Tillu——机器人
Tillu是一款融合先进机器人技术与创造力的独特机器人,旨在激发学习与创新!它由运行Debian操作系统的UNIHIKER驱动,利用强大的控制系统实现逼真的动作和动态交互
发表于 01-02 17:24
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
感谢
感谢电子发烧友网社区给予《具身智能机器人系统》试读机会。在这知识的盛宴中,我感受到社区的关怀与支持。定不负期望,认真研读,分享所学,回馈社区。
一、本书大纲
《具身智能机器人系统》是一本
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
巡线机器人电路图 巡线机器人的工作原理和应用领域
巡线机器人,作为一种先进的智能巡检设备,近年来在多个领域得到了广泛应用。它以移动机器人为载体,搭载多种检测仪器,通过机器视觉、电磁场、GPS、GIS等多场信息融合技术,实现自主移动、自
乐聚机器人与江苏亨通携手研发人形机器人专用线束
近日,乐聚(深圳)机器人技术有限公司与江苏亨通集团达成重要战略合作,共同致力于人形机器人专用线束及相关线缆产品的研发工作。这一举措旨在推动人形机器人线材和线缆连接器的标准化与产业化,为
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,在 PS层运行 苏姆的裸机程序, 并将六自由度串联机器人逆解算法移植到主站代码里,进行机器人末端位置对于视觉反馈的实时跟随控制。
(4)通过实验验证了本设计的对物块识别的准确性和实时性,并使用自主
发表于 05-29 16:17





 工商网监
工商网监
评论