 如何使用Internet浏览器在wi-fi网络中远程控制某些伺服电机
如何使用Internet浏览器在wi-fi网络中远程控制某些伺服电机
第1步:电子产品
对于此项目,您需要以下组件:
Arduino Uno(购买)
ESP8266(购买)
Protoshield(用于更紧凑的版本)或普通面包板(购买)
10 kohm电阻器(x3)
一些跳线
SG90伺服电机r(x2)(购买)
计算机(用于编译和上传Arduino代码)
您不需要特定的工具来组装该项目。所有组件都可以在您喜欢的电子商务商店上在线找到。该电路由USB端口供电(已连接到计算机或普通的电话充电器),但是您也可以添加一个外部DC电源或一个连接到Arduino电源插孔的电池。
步骤2:组装
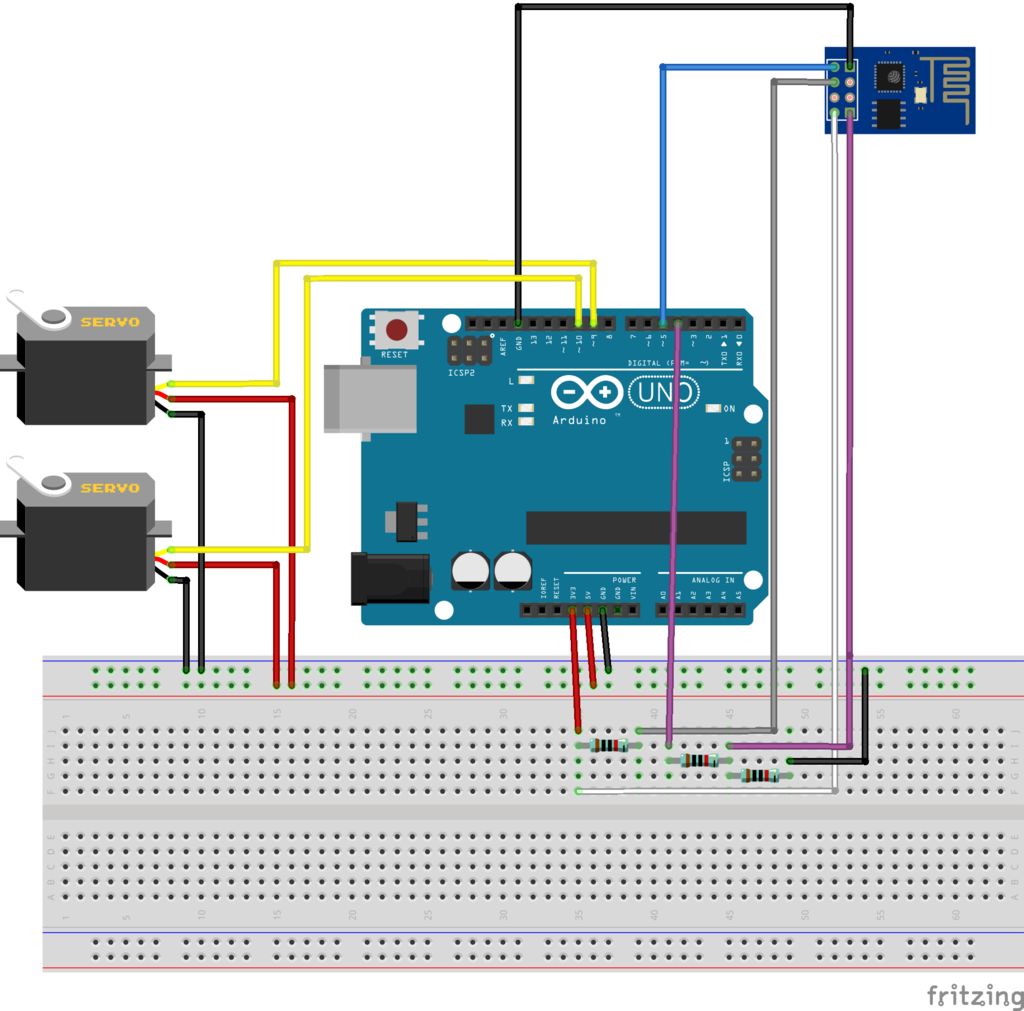

根据示意图连接所有组件。您需要一些跳线来连接ESP-8266模块和伺服电机。您可以使用原型屏蔽板(用于更紧凑的电路),普通的面包板,或设计自己的Arduino屏蔽板。
将USB电缆插入Arduino Uno板并继续下一步。
第3步:Arduino代码
安装最新的Arduino IDE。在此项目中,使用了Servo.h库来控制伺服器。为了避免在上传代码期间wi-fi模块和计算机的USB端口之间发生冲突,我们使用了软件串行库。与ESP-8266模块通讯无需其他库。请检查ESP8266的波特率,并在代码中正确设置。
某些伺服电机位置接近极限(0度和180度)时会开始抖动并发出奇怪的声音。为了避免这种情况,在Arduino代码和控制界面(后来)中,角度都限制在10到170度之间。
不幸的是,s伺服.h库和softserial.h库使用相同的计时器微控制器。每当Arduino与ESP-8266通信时,这可能会导致伺服器抖动。为避免这种情况,在执行每个命令后,将舵机与Arduino分开。您也可以将模块连接到标准串行引脚。在这种情况下,请记住在每次上传之前断开模块的连接。
下载Arduino代码(wi-servo.ino),并用wifi路由器SSID替换XXXXX,并用路由器密码替换YYYYY。将Arduino开发板连接到计算机的USB端口并上传代码。
第4步:接口
已设计了html界面用于控制伺服电机。在此示例中,使用了两个舵机,但可以向Arduino Uno添加更多舵机(我最多测试了四个电机)。
使用文本框形式输入ESP模块的IP地址。
p》
下载Wi-servo.html和jquere.js文件并将它们保存在同一文件夹中。
步骤5:用法
重新启动Arduino时,它将尝试自动连接您的wi-fi网络。使用串行监视器检查连接是否成功,并获得路由器为您的ESP-8266分配了哪个IP。
在Internet浏览器(Firefox)中打开html文件。
在文本框中输入ESP-8266的IP地址,即可开始使用。使用滑块为每个伺服选择所需的角度。松开鼠标按钮并移动每个舵机时,浏览器会自动向Arduino发送请求。
责任编辑:wv
-
伺服电机
+关注
关注
85文章
2030浏览量
57725 -
浏览器
+关注
关注
1文章
1016浏览量
35282
发布评论请先 登录
相关推荐
Wi-Fi 8要来了!未来Wi-Fi技术演进方向揭秘

Microchip Technology WINCS 02 Wi-Fi®网络控制器IC/模块

Wi-Fi 7与Wi-Fi 6E有什么区别
IR900 Wi-Fi联网的配置过程
ESP8266如何为应用程序选择正确的Wi-Fi模块吗?
AT 0.60.0.0看不到我的Wi-Fi网络,为什么?
未来的Wi-Fi路由器
华为获得全球首个国际Wi-Fi联盟WFA企业级Wi-Fi 7认证!


Wi-Fi的诞生与发展

Wi-Fi HaLow和传统Wi-Fi的区别
康普携手Wi-Fi联盟,RUCKUS Wi-Fi 7系列接入点成Wi-Fi
BT Wi-Fi模式是否可以通过ModustoolBox对套件进行编程来实现?





 工商网监
工商网监
评论