 3D打印四足机器人的制作
3D打印四足机器人的制作
步骤1:机箱的设计
机箱的设计应确保施加在电机上的最大扭矩
在电动机的额定范围内。
在设计机箱时要记住的主要参数是:
1。股骨长度
2。胫骨长度
3。估计的重量(保持在较高的一侧)
4。所需间隙
由于这是硬件,因此必须采取足够的间隙。我到处都使用了自攻螺丝。所以我的设计中确实有线程。用3D打印机制作小螺纹并不是一个好主意。您可能必须先打印小零件,以便在最终裁切之前检查间隙。仅当您像我这样没有足够的经验时,才需要执行此步骤。
如果您想进一步控制四足动物的运动。步态设计也应纳入方程式。因为这是我的第一个项目,所以我稍后才意识到这一点。
步骤2:3D打印机箱
我3D打印了PLA的机箱(Poly乳酸)。打磨零件以获得足够的间隙。然后按照我的设计,用伺服器组装所有零件。请记住,您的所有伺服器都是同一制造商,因为不同的制造商可能具有不同的设计。这发生在我身上。因此,请事先检查。
步骤3:操作电路

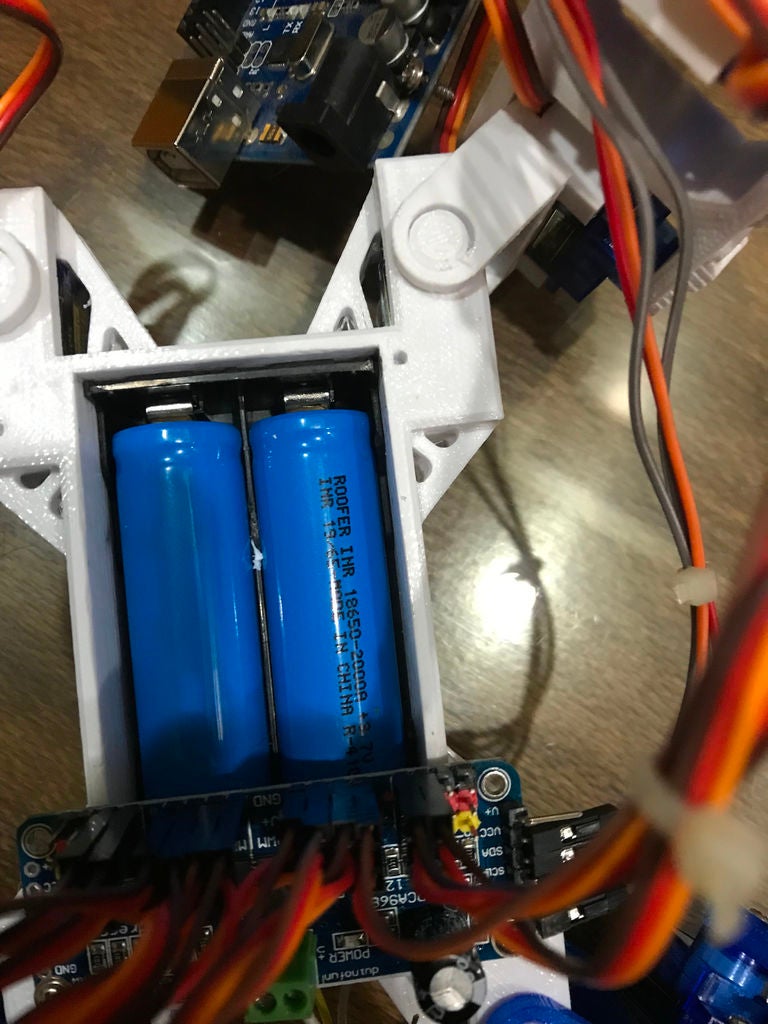
我正在使用Arduino UNO和适用于我的机器人的16通道伺服控制器。您可以在网上轻松找到它们。相应地连接引脚。您需要编写伺服引脚与哪个引脚的连接。否则以后会引起混乱。将电线捆扎在一起。我们很高兴。
对于电池,我提供了两个高电流放电的LiPo电池(3.7V)。我将它们并联连接,因为伺服的最大输入为5v。
第4步:对四足动物进行编码
尽管开始时看起来很困难,但以后会变得更容易。步态设计是您编写代码时要记住的。请记住以下几点:
1。在任何时候,四足动物的重心都必须在双腿形成的区域内。
2。角度应从设定参考中获取。这取决于您的设计以及您希望如何移动双腿。
3。我使用的是180度伺服电机,而不是齿轮减速电机,因此您在固定伺服电机时已进行了检查
关于代码的说明,此链接就足够了:
https://makezine.com/2016/11/22/robot-quadruped-ar 。..
这些是我的代码
第5步:几何计算
角度是通过三角学计算的:
1。您首先找到2D腿长
2。然后检查机器人的仰角
有了这两个约束,您可以轻松计算出伺服系统的角度。
写我已经编写了前进代码。我将在以后再次尝试时更新代码。
步骤6:进一步改进
我将为控件添加一个蓝牙(BLE)模块
感谢您查看我的项目,欢迎有任何疑问。
-
机器人
+关注
关注
211文章
28455浏览量
207268 -
3D打印
+关注
关注
26文章
3550浏览量
109147
发布评论请先 登录
相关推荐
开源项目!OpenCat—— 一个全能的平价四足机器人
在NVIDIA Isaac Lab中训练四足机器人运动


开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
3d打印机器人外壳模型ABS材料3D打印喷漆服务-CASAIM
3D打印汽车零部件建模设计3D打印服务

上海伯东工业级3D打印机为机器人的制造工艺带来新变革
3D打印遥控气垫船、微型步行机器人、变压器式实验室电源|DF创客周刊(第77期)
银牛微电子3D视觉感知方案赋能小米CyberDog系列仿生四足机器人
制作一只3D打印的遥控机器狗
基于树莓派的四足喷水机器人设计







 工商网监
工商网监
评论