 雷达是如何根据多普勒频率对回波的不同进行区别分类?
雷达是如何根据多普勒频率对回波的不同进行区别分类?
多普勒滤波器组
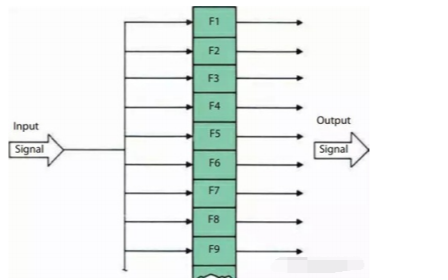
雷达是如何能够同时检测来自多个不同目标的回波,然后根据多普勒频率的不同进行区别分类呢?从原理上来说是非常简单的,即雷达接收的回波信号通过被称为多普勒滤波器的一组数字滤波器来实现,如下图所示。
接收的雷达回波信号经过一组并行的滤波器后实现多普勒频率分离。每个滤波器的设计都是为了得到一个较窄的多普勒频带,如图所示。在理想情况下,只有每个滤波器在接收信号的频率落在对应的频带内才会产生输出;
而实际上由于滤波器旁瓣的原因,可能会在相邻频带内出现信号泄露。如果按照距离/多普勒频率进行排序,则在每个距离单元上进行独立的多普勒滤波处理。
多普勒滤波器组的每个中心频率点从低到高顺序排列,为了使相邻滤波器跨越目标频率时的信噪比损失最小化,滤波器的通带之间总会设计成相互交叠的形式,如图所示。因此,在滤波器组相互交叠的区域都可能会有相邻频率信号的泄露。
在忽略滤波器旁瓣的条件下,每个滤波器只能够通过某窄带频点的信号,当该信号的频点离滤波器的中心频率越近,输出的信号幅度也越大。为了最小化滤波器输出能量损失,当输入信号频率位于两个相邻滤波器之间时,采用相邻滤波器通带部分交叠的方法。
滤波器带宽
窄带滤波器的选择特性也是在一段持续时间内表现出来的;能够通过滤波器的频带宽度主要与信号的积累时间有关。
正弦信号(即脉冲波形)具有的频谱波形,如图所示。
滤波器带宽与积累时间之间的关系与以前讨论的方法有一些不同,即:
·保持滤波器调节系数为常数,按照一定的步进不断改变输入信号的频率;
·滤波器积累时间控制在积累时间以内,确保信号持续时间至少为积累时间。
通过以上描述的方法,用图形化的手段绘制出窄带滤波器在不同频率点的响应曲线。窄带滤波器的中心主瓣区域是滤波器的通带,主瓣区域的中心频率为滤波器谐振频率。如图所示,滤波器频谱的两个过零点带宽为2除以积累时间。
为了便于比较,将上图在方位上的尺寸进行了调整,使得二者之间的零点宽度看起来是相同的。需要记住的是,积累时间通常为毫秒量级,而脉冲宽度大约为积累时间的千分之一,在微秒量级上。
如同天线辐射方向图的主瓣一样,滤波器的3dB带宽(即输出功率降低到最大值一半时的宽度)比零点到零点的带宽更有用;与均匀辐射的天线相似,3dB带宽大约是零点到零点带宽的一半。即
为了达到以上带宽,所应用的信号持续时间至少应当等于积累时间。在实际应用中,滤波器带宽通常是基于最大可用的积累时间来确定的。
如果雷达辐射的波形是脉冲形式的,为达到给定信号带宽就必须积累足够的脉冲数量,由此可以看出,滤波器的3dB带宽等于PRF除以积累脉冲数量。以上讨论的带宽是指最小可达到带宽,根据实际工程应用,由于数字加权带来的损失使得滤波器通带会有所展宽。
滤波器组的通带
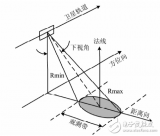
在整个带宽内必须包括足够多的滤波器来估计多普勒频率的范围,从而能够覆盖到预期设计的目标速度范围。例如,预计最大的正多普勒频率为100kHz,最大的负多普勒频率为-30kHz,如下图所示,则滤波器组的通带范围至少为100 + 30 = 130kHz,雷达工作重频至少应大于130kHz。
当PRF大于最大与最小多普勒频率所包括的范围时,整个多普勒通带应当设计得足够宽以保证所有频率分量能够通过。
另一方面,如果PRF比期望的多普勒频率扩展范围小,则滤波器通带的设计值应当小于PRF。这也用另一种方式证明了Nyquist定理,即任何信号的采样频率都必须达到信号最高频率的两倍来避免模糊。
如下图所示,当PRF小于多普勒频率的扩展宽度时,目标多普勒的旁瓣谱线会落在通带以外,这时候只有目标多普勒的主瓣谱线能够经过滤波后输出。
当PRF小于多普勒频率扩展范围时,滤波器带宽应当小于PRF,从而保证通带内只有一个目标信号存在。
下图描述了当滤波器通带等于PRF或时目标谱线移动与滤波器组之间的关系,从图中可以看出,在滤波器通带内始终只落入了目标的一根主谱线;随着目标多普勒频率从低到高移动,相对应的谐波谱线也在不断变化。
一般将通带宽度设置为略小于,从而有效避免主瓣区域的地杂波,这样能够分离出静止杂波和运动目标。在实际中为了简化设计并不需要改变多普勒滤波器的频率,而是将雷达回波的频谱相对于滤波器组进行适当的搬移。
-
滤波器
+关注
关注
160文章
7727浏览量
177670 -
脉冲宽度
+关注
关注
1文章
17浏览量
10061
发布评论请先 登录
相关推荐
【RSP1多普勒雷达传感器试用体验】风扇的多普勒频谱观察
基于CPCI接口DSP板的雷达目标模拟器
5.8G雷达存在感应模块,微波雷达智能感应灯应用,多普勒雷达技术
毫米波雷达工作原理,雷达感应模块技术,有什么优势呢?
存在感应雷达感应模块,人体回波特征探测雷达,飞睿科技雷达模组应用
利用雷达的微多普勒识别苍蝇

在FPGA中SAR回波模拟中回波信号多普勒相位的两种实现方法





 工商网监
工商网监
评论