 自动机水族馆的制作图解
自动机水族馆的制作图解
步骤1:创建Fish
鱼代表该系统的一些组件中的第一个组件
步骤中进行描述2:水母的构建
步骤3:伺服修改
我们在https://www.instructables.com上概述了用于该水族馆的亚微伺服系统的修改过程。/id/Sub-Micro-Continuous-Rotation-Servo-Modification/,重点关注具有成本效益的Hitec HS-55模型。
第4步:创建定位系统
我们在https://www.instructables.com/id/Laser-Cut-Wooden-4-Axis-Positin中描述了生产和组装四自由度木质定位系统的过程G-系统/。我们还保证,盲目链接到我们的其他教学人员将很快停止。
步骤5:创建木制框架
可以构造木制框架以适合您的特定参数。但是,我们建议为定位系统提供一个较大的下部隔间,并为隐藏水母提供一个上部隔间。我们在上层隔室上贴了蜡纸,但任何不透明或半透明的东西都可以。
步骤6:添加光传感器
我们将光传感器安装在框架的顶部,并将其长电线沿框架的内侧向下布线,以免引起旁观者的随意目光。为方便起见,我们在面包板上连接了10K电阻器,但它也可以包含在上面。
步骤7:安装水母
切出大约半个木头圈。直径3英寸,并将其连接到伺服器上。将此伺服器安装在框架的顶部边缘之一上。将热胶粘在每个水母顶部约16英寸的钓线上。在框架顶部附加一块长木头,并在中心钻一个孔。在这个十字形的底部,在水母将悬挂的每个位置上,拧一个眼钩。从水母上穿过鱼钩勾勒出鱼线,然后从木头中心的孔中向上划出一条线。将水母放到所需的高度,然后将所有钓鱼线结在一起。将一条较长的钓鱼线绑在该结上,将其拉紧,然后将其粘贴到舵机的半轮上。如果需要,可以在顶部添加更多的吊钩,以将钓鱼线引至伺服轮。
步骤8:接线
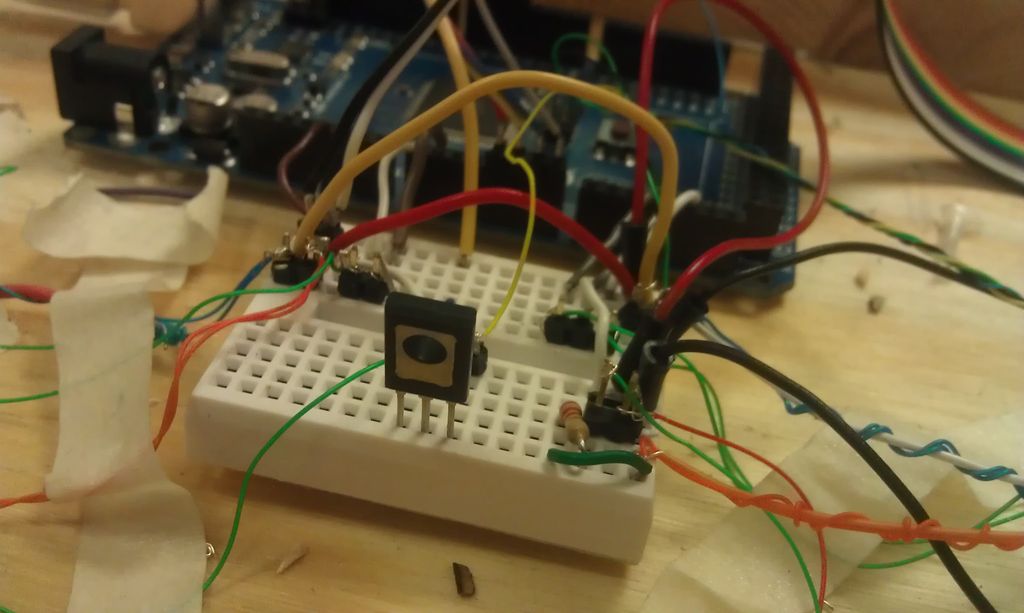
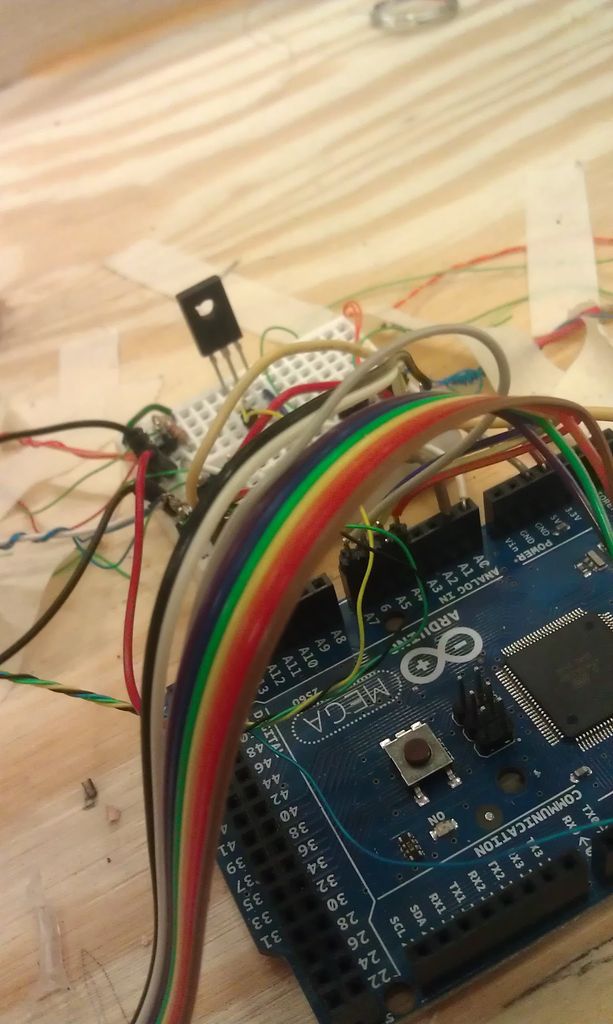
我们在一个3D定位系统的底部放置了一块带有一块小型面包板的Arduino Mega,通过跳线和Mega的5V端口可以轻松实现功率分配设置。诚然,此步骤有些麻烦,但是使用默认代码将使用以下引脚分配:
AIN引脚12上的光传感器
数字线路4上x伺服的控制线
电位器反馈AIN引脚4上的x伺服的控制线
数字线5上的y伺服的控制线
AIN引脚5上的y伺服的电位反馈线
数字线6上的z伺服控制线AIN引脚6上z伺服的电位器反馈线
//数字线7上theta伺服的控制线(在股票代码中禁用。..请参阅代码步骤)
//AIN上theta伺服的电位器反馈线引脚7(禁用股票代码。..。参见代码步骤)
数字线路9上的水母伺服控制线
数字线路12上的水母LED控制
您会注意到,水母中的LED需要额外一点“ ump”并需要MOSFET。因此,如下图所示,信号输入连接到栅极,电源连接到源极,信号输出到漏极。信号输出通过LED接地。
步骤9:设置逻辑
我们的代码当前托管在https://github.com/Samnsparky/AutomataAquarium。不幸的是,由于在伺服器静止不动时电阻电阻的微小差异会改变发送到外围设备的值,因此对于伺服器有一个校准步骤。因此,在接线后,您将需要取消注释第34、36和38行的第一次运行,然后再注释掉它们。这仅运行诊断程序并将结果保存到EEPROM。这些校准值将继续用于以后的迭代(或至少在您清除EEPROM之前)。默认行为是使鱼向前摆动,并在环境黑暗时使其停止,从而使水母掉落并照亮。但是,可以通过更改theaquarium_onFishReachedGoal函数来更改此行为。就是这样!试试看,并告诉我们它如何进行。
-
伺服
+关注
关注
16文章
651浏览量
41003 -
光传感器
+关注
关注
3文章
171浏览量
29946
发布评论请先 登录
相关推荐
LITESTAR 4D应用:室内博物馆照明案例
探索AC自动机:多关键词搜索的原理与应用案例
虹科免拆诊断 | 2017款路虎发现5车行驶中发动机自动熄火


探索智能水族世界:5010蓝牙水族灯芯片

博格华纳出席SAE 2024交通能源可持续发展高峰论坛
松下携手盛世飞扬揭牌“数字媒体先锋馆暨Panasonic影像馆”
全自动机器人激光焊接机主要用于哪些行业

博物馆温湿度监测系统方案

2014款保时捷卡宴车行驶中发动机偶尔自动熄火
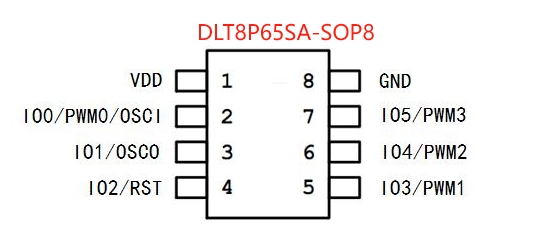
深度解析:DLT8P65SA芯片驱动的220V RGB水族灯创新方案





 工商网监
工商网监
评论