 避障移动控制线跟随机器人的制作
避障移动控制线跟随机器人的制作
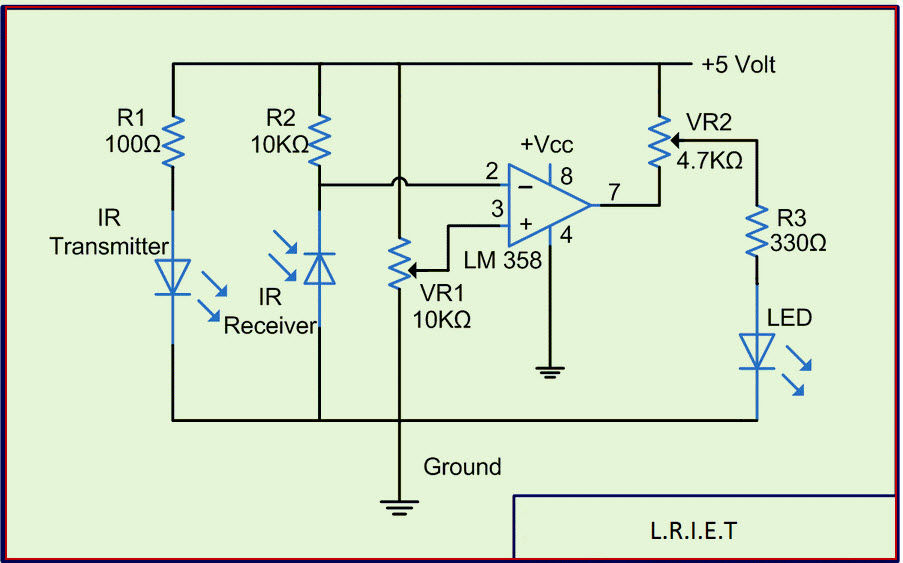
建造自己的传感器比购买传感器要好。我首先制造了一个传感器,但是使发送器和接收器都保持非常靠近,这导致了高灵敏度并且无法检测到黑色。进行修改后,它可以正常工作。
所需组件列表
1。 LM358
2。红外发光二极管又称发射器
3。光电二极管或红外接收器
4。电阻(100ohm,2x10Kohm,330ohm)
5。电位计(4.7Kohm)
按照电路板上的电路图所示连接组件,并检查其工作情况。
如果一切顺利,则将这些组件放在PCB板上,焊接组件。然后在黑色表面上测试传感器,并根据需要使用电位计调整灵敏度。
步骤2:制作主体
如前所述,它看起来像玩具车。为此,您需要一个可以购买或制造的机箱。车轮连接到电动机,电动机连接到底盘。
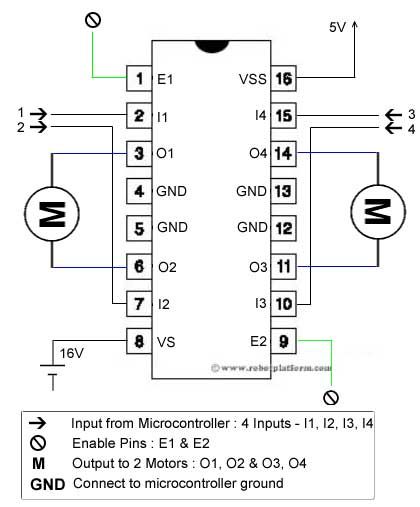
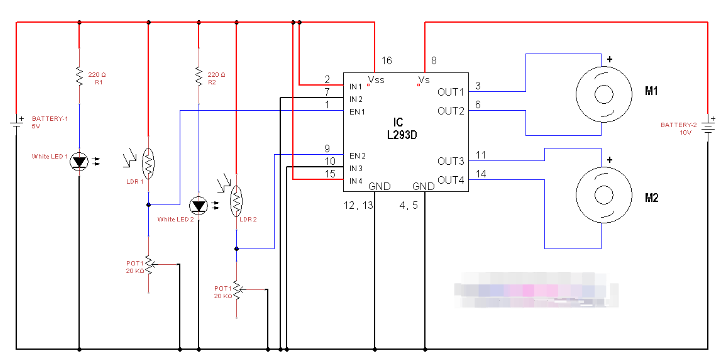
通常,所有传感器和微控制器都在5v电压下工作,但是5v电压不足以驱动电动机,因此我们需要一个电动机潜水器IC(例如L293D)。该驱动器IC借助外部电源从较小的输入电压驱动电动机。
电路图中显示了IC和电动机的连接。
Arduino提供了一个小的12V 1A铅酸电池作为电动机的外部电源,并提供了5v电源。
第3步:Arduino连接
将所有传感器连接到Arduino并对其进行编程。
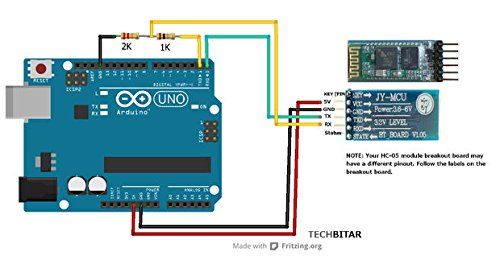
-蓝牙模块。
使用5V电源打开蓝牙电源,但使用3.3V进行数据传输。 Arduino的数据传输功率为5V,因此我们在Arduino发送引脚和蓝牙模块接收器引脚之间使用了分压器。但是,Arduino可以接收3.3V信号,因此在蓝牙发射器和Arduino接收器引脚之间不需要分压器。
蓝牙模块和Arduino的连接如电路图所示。
p》
-红外传感器
红外传感器的数据引脚或信号引脚连接到Arduino的数字引脚,并记下数字引脚号。传感器的电源由Arduino提供。
-超声波传感器
通常,超声波传感器具有四个引脚,分别为触发,回波,Vcc和Gnd。触发销触发声波,而回音销接收声波。传感器的触发引脚和回波引脚连接到具有PWM的Arduino数字引脚。传感器的电源来自Arduino。
-蜂鸣器
蜂鸣器的Gnd引脚通过一个电阻串联到Arduino的Gnd,即电阻的信号引脚。蜂鸣器连接到Arduino的数字引脚。
-电动机驱动器
在上一步中显示了电动机和电动机驱动器的连接。现在,将电机驱动器IC的输入引脚连接到Arduino的数字引脚,并从Arduino获取IC的电源。但是,我们在驱动器IC外部提供了一个用于驱动电机的驱动器,但需要工作5V电源,这是由Arduino提供的。
所有连接均已连接到Arduino,现在考虑到所有
第4步:应用程序构建
有许多用于构建Android应用程序的平台,但最简单的平台是MIT App Inventor 2.这是一个在线应用程序构建平台,其中包含许多示例和指南。
我将分享我已构建的应用程序,并尝试构建您的应用程序,以便它将提供大量的经验并可以针对
如果您有任何疑问或疑问,只需对此线程发表评论。
该应用的密码为“ makeyourself”。
步骤5:编程
我将给出一个关于Arduino编程的想法。如果您在编写代码时遇到任何困难,请发表评论,我会尽力帮助您。导入文件不会提供任何技能和知识。因此,请尝试编写自己的代码,但是如果您只想注释代码,我会将该代码发送给您。
-为Ultrasonic编写代码,以获取障碍物与传感器之间的距离。
-为蜂鸣器编写代码,并在距离小于给定距离值时激活蜂鸣器,并使电动机驱动器的信号变低,以便电动机停止。
-编写代码对于使用串行通信的蓝牙模块,请注意在移动设备上按下特定按钮时来自模块的数据。
-通过该数据将信号提供给电机驱动器,以便我们获得所需的输出。
-编写用于红外传感器的代码,这样,当来自特定传感器的信号发生变化时,电动机驱动器信号也会发生变化,并将根据该信号驱动电动机。
-
机器人
+关注
关注
210文章
28254浏览量
206711
发布评论请先 登录
相关推荐
艾迈斯欧司朗Belago红外LED,助力Supernode打造避障扫地机器人

开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人

巡线机器人电路图 巡线机器人的工作原理和应用领域





 工商网监
工商网监
评论