 怎样用XBox控制器通过wifi控制RC汽车
怎样用XBox控制器通过wifi控制RC汽车
步骤1:MPU6050
PI使用MPU6050 IMU。首先,您必须在pi上启用I2C,将其连接起来,然后使用“脚本”中的命令对其进行测试。同样,可能存在一些依赖性。服务器使用XBOX力反馈将影响传回客户端,以作为触觉反馈传递给操作员。
https://www.instructables.com/id/Reading-I2C-Inputs 。..
安装i2c工具。..
sudo apt-获取安装libi2c-dev
在pi的BIOS上编辑i2c,然后重新启动。
sudo raspi-config
sudo nano/etc/modules
sudo nano/etc/modprobe.d/raspi-blacklist.confsudo i2cdetect -y 1
MPU605应该显示为68。
步骤2:Pi Blaster
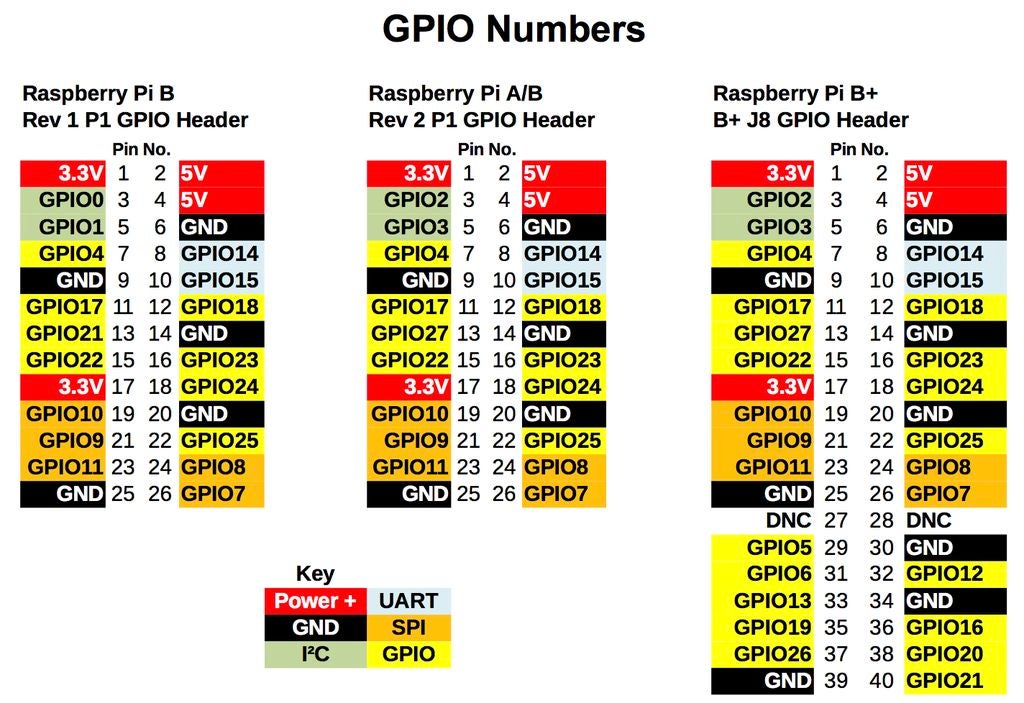
Pi上的PWM通过Pi blaster守护程序完成。服务器将数据直接从Pi发送到舵机,并通过软件发送到PI-BLASTER FIFO。
sudo apt-get install autoconf
git clone https://github.com/sarfata/pi-blaster.git
cd pi-blaster
。/autogen.sh
。/configuremake
》 sudo make install
sudo make install-停止自动启动
FIFO位于/dev/pi-blaster
要完全打开GPIO引脚17:
echo“ 17 = 1”》/dev/pi-blaster
将GPIO引脚17设置为20%的PWM
echo “ 17 = 0.2”》/dev/pi-blaster
要进行测试,只需使用万用表和一些回显命令,在纸上写下您需要发送给伺服器的内容,以使其能够执行所需的操作。检查我的服务器代码以获取我的值,很幸运,由于控制信号是单极性的,您可以使用PI提供的0-3.3V来控制它们。
注意-(1)过去在使用锁定功能干扰PIs Windows环境时,我遇到了问题,因此我不倾向于启动PI X Windows接口。(2)sudo chown root test.sh,然后sudo chmod + s test.sh以允许脚本以非root身份访问GPIO
步骤3:Wifi
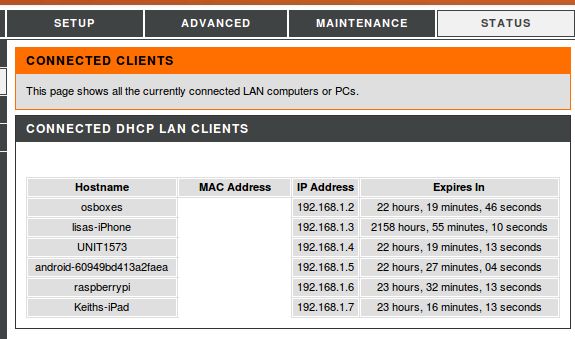
按照adafruits指南使用Pi上的终端设置wifi。我发现通过命令行更容易完成此操作,并且x窗口中的GUI出现了问题。
sudo cp interfaces/etc/network/
步骤4: XBOX 360控制器测试
获取Windows XBOX无线驱动程序并安装驱动程序。如果您购买廉价的中文副本却无法获得,则此处有一个教程http://www.s-config.com/archived-xbox-360-receiver-install-for-win-xp-and-win-7/它工作。配对时,控制器上的LED会显示。如果驱动程序是最新版本,则驱动程序应该已经在Linux上,我使用的是Xubuntu15。使用以下命令查找或测试XBOX控制器。
使用cat/proc/bus/input/devices,外观如果不确定,则在‘Handlers’处!fftest/dev/input/event3,此测试强制feedback.jstest/dev/input/js0,此测试类似物.ls/dev/input,您应该在此处看到操纵杆FIFO。必须在linux中安装任何东西(除了jstest之外),所有的麻烦都在Windows中。首先在Windows中对其进行测试,然后在“设备和打印机”中检查游戏手柄上所有控件的功能。然后在linux上使用jstest和fftest进行测试。
步骤5:在Pi上安装Gstreamer和Picamera
一般来说,对于gstreamer,我使用:
https://sparkyflight.wordpress.com/2014/02/22/rasp 。..作为参考。
一旦高兴,您就可以测试Protobot脚本cd〜/Protobot。/runclient.sh 192.168.1.6
服务器(机器人)一旦设置便自动运行。
责任编辑:wv
-
控制器
+关注
关注
112文章
16332浏览量
177800 -
遥控车
+关注
关注
9文章
81浏览量
23710 -
Xbox
+关注
关注
0文章
186浏览量
16935
发布评论请先 登录
相关推荐
电机控制器原理是什么?类型有哪些?
工业控制中常用的pid控制器是什么
组合逻辑控制器是用什么实现的
国芯科技与智新控制携手,共绘汽车控制器国产化新篇章
PID控制器与PWM控制器的区别
PWM控制器与MPPT控制器的区别
WIFI远程开关控制器
汽车区域控制器架构趋势下的SmartFET应用
空调温度控制器怎么使用 空调温度控制器坏了会怎样
对话:探讨电机驱动控制器市场的需求空间






 工商网监
工商网监
评论