 Domino建筑机器的分步制作
Domino建筑机器的分步制作
步骤1:机箱,支撑构件和导向方式
计算所需零件的所有尺寸,并如图所示绘制在日光板上。
第1部分:A长底盘的设计可支持所有其他零件,电机和机械装置。
第2部分:是机械的顶部支撑,最终粘在背面支撑上。
第3部分:背面支撑在单一方向上引导机械。
第4部分:第2部分是机械杆的导轨,因为该机械由两个组成,并且在给定的路径中往复运动。
第5部分:此支撑构件的一端连接到第2部分,另一端连接到第6部分。提示:安装第5部分时,请注意多米诺骨牌向外移动的距离。
第6部分:
步骤2:带电动机的主推动机构。
主要机构由适当尺寸的太阳板和一个槽组成,通过槽将电动机的旋转运动转换为平移运动。
A红色轴是3D打印的,并附有电动机轴。一根吸管的一端固定在红色轴上,另一端固定在机构的插槽中,如图所示。
步骤3:降低机器人速度
为了平稳地应用将多米诺骨牌从机器人中推出的主要机构,主要现象是通过增加电机轴的负载来降低机器人速度。橡皮筋附着在电机轴上,这最终会增加电机轴上的负载并降低速度。附件如上图所示。
步骤4:WITBLOX套件
WITBLOX套件包括电机每个电机的驱动器和一个电源驱动器和电池。每个组件的连接非常简单。电池连接到电源块,电源块连接到电机驱动器。每个电机驱动器均连接到相应的电机。您可以在WITBLOX或WITBLOX应用程序上购买这些东西。两个电机,一端带轮,另一侧带脚轮。从视频到视频,从第1部分到第6部分的所有其他部分均已安装机械装置,并对机器人进行了出色的测试。
责任编辑:wv
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
53文章
8259浏览量
146628 -
电动机
+关注
关注
75文章
4115浏览量
96652
发布评论请先 登录
相关推荐
建筑能耗监测对既有建筑节能的研究
摘 要:在建筑能耗监测技术的基础上,融合建筑能源审计技术性和工程建筑能耗等级评价技术,研究现有建筑的能耗,明确提出节能改造计划方案。在未来,该研究思路还可以运用于我国既有
建筑能耗监测对建筑节能的研究
摘要:基于建筑能耗监测技术,融合建筑能源审计技术与工程建筑能耗等级评价技术,研究既有建筑能耗,提出节能改造方案。该研究思路可应用于我国既有建筑
建筑能耗监测系统方案
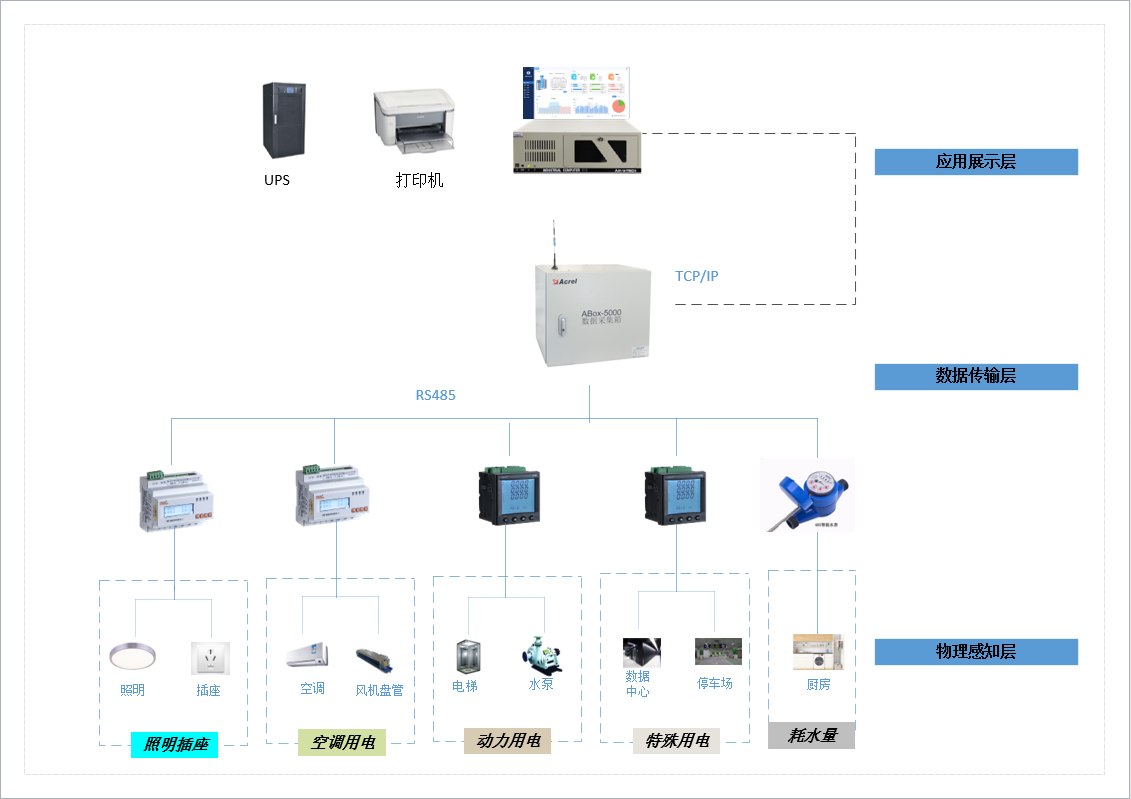
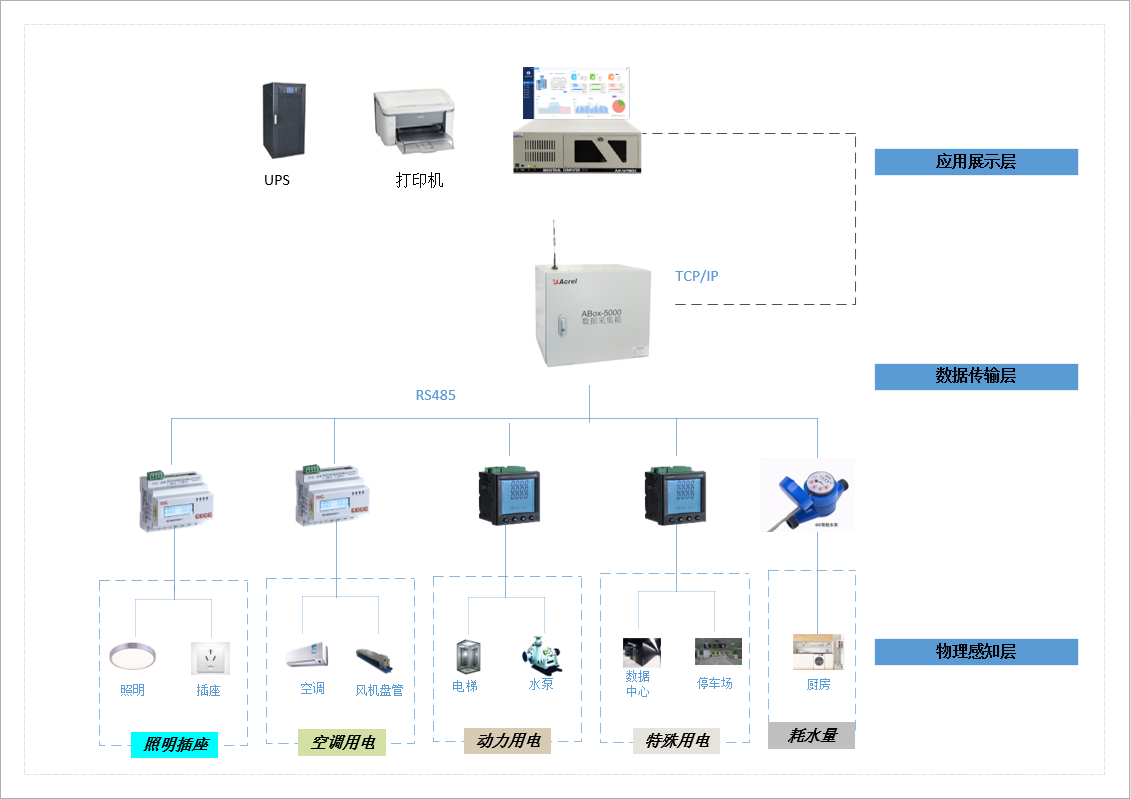
随着全球能源危机日益严峻,与环境保护意识的不断增强,建筑能耗监测系统方案成为实现节能减排、推动绿色建筑发展的重要手段,是现代建筑管理的重要工具。 建筑能耗监测系统方案是集现代信息技术、
建筑能耗监测对既有建筑节能的研究分析
摘 要: 在建筑能耗监测技术的基础上,融合建筑能源审计技术性和工程建筑能耗等级评价技术,研究现有建筑的能耗,明确提出节能改造计划方案。在未来,该研究思路还可以运用于我国既有
Han Domino RJ45模块
Han-Modular® Domino 产品组合的新亮点即将推出 - Domino RJ45 模块! Domino 系列主要满足行业对节省安装空间和重量的要求。例如,Domino 模块
发表于 10-09 18:32
•254次阅读

开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50

智能建筑虚拟仿真技术:未来智能建筑的关键
智能建筑虚拟仿真技术作为智能建筑和建筑领域的重要创新,正在推动未来智能建筑改革的趋势。它不仅将传统的建筑监控系统图带入了一个新的时代,也为智
建筑智能控制系统的特点
建筑智能控制系统 (Building Automation System,简称BAS)是利用先进的信息技术、通信技术和控制技术,对建筑内的设备、系统进行集成管理和控制的系统。它的出现极大地提高了
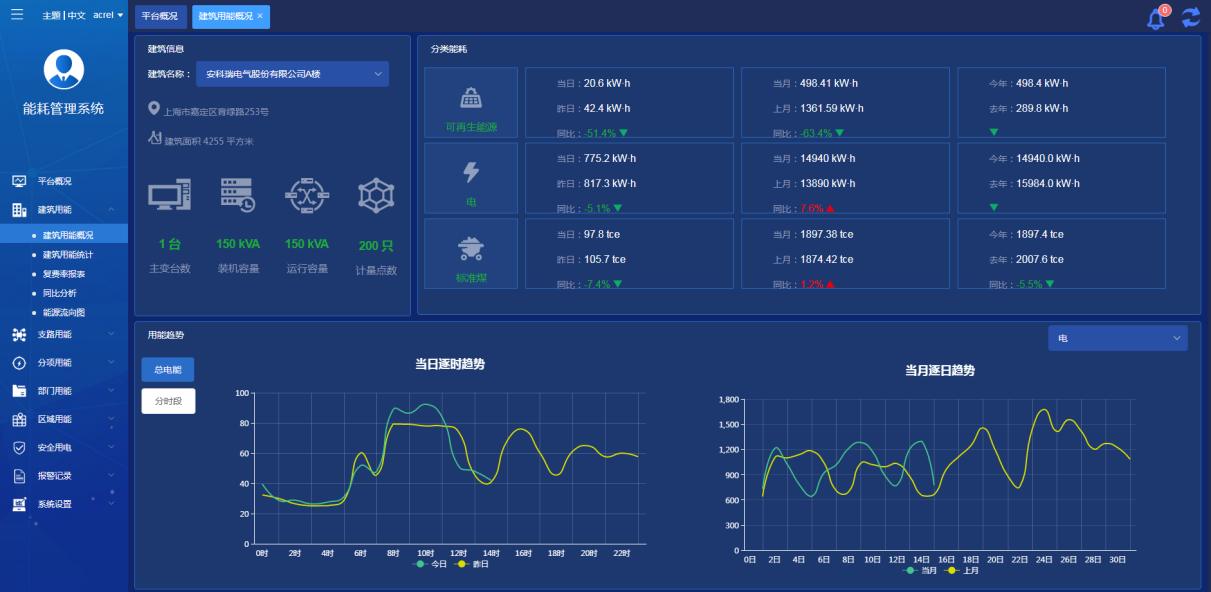
浅谈某办公建筑的建筑能耗管理系统设计及分析
程瑜 江苏安科瑞电器制造有限公司 江苏江阴 214405 摘要 :本文针对某大型办公建筑项目,将建筑群内部的所有能耗数据和参数,传输至建筑能耗管理平台,由能耗管理平台进行数据统计、分析和处理后,反馈

建筑自动控制系统-实现舒适、节能的双重目标
建筑自动控制作为建筑设备的智能管理系统,在当今智能建筑领域发挥着越来越重要的作用。实现舒适节能的双重目标,为人们创造更宜居、更环保的建筑环境
智慧建筑——智能、高效、舒适的生活环境
建筑自动控制作为建筑设备的智能管理系统,在当今智能建筑领域发挥着越来越重要的作用。实现舒适节能的双重目标,为人们创造更宜居、更环保的建筑环境
中国建筑学会建筑电气分会2024年学术年会
人间四月天,鸟语花香柳如烟。安科瑞与来自全国的业界同仁邂逅美丽春日,共聚武汉,赴中国建筑学会建筑电气分会2024年年度盛会,碰撞思想火花,掀起头脑风暴,欢庆建筑电气分会成立40周年。会议由中国

ICON发布一套新型建筑3D打印硬件、软件和材料
2024年3月,先进建筑公司ICON 发布了一套可实现建筑自动化的新产品和技术,包括能够实现多层建筑的全新机器人打印机、新型低碳建筑材料、包





 工商网监
工商网监
评论