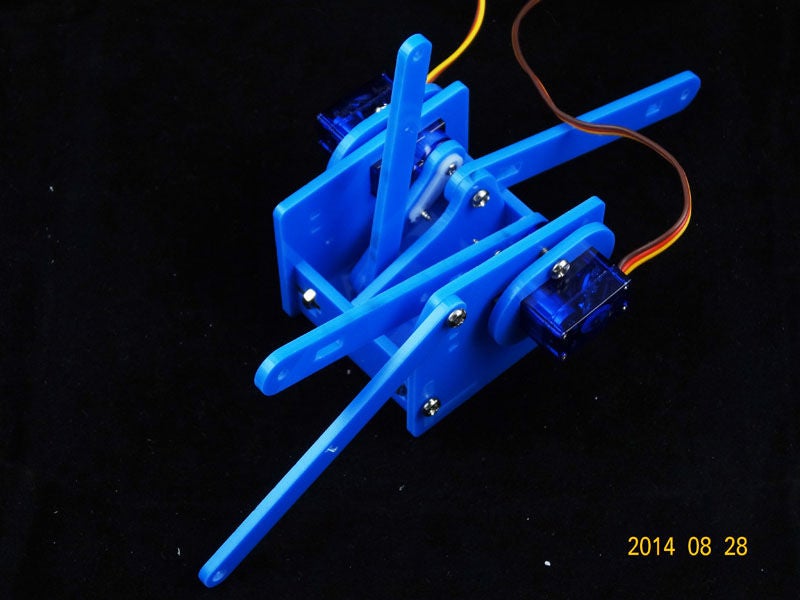
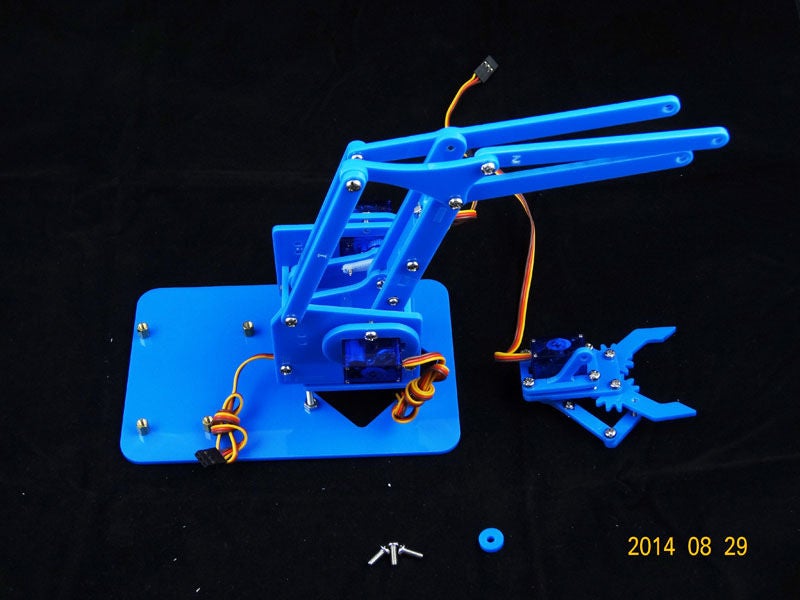
 袖珍型机械臂DIY图解
袖珍型机械臂DIY图解
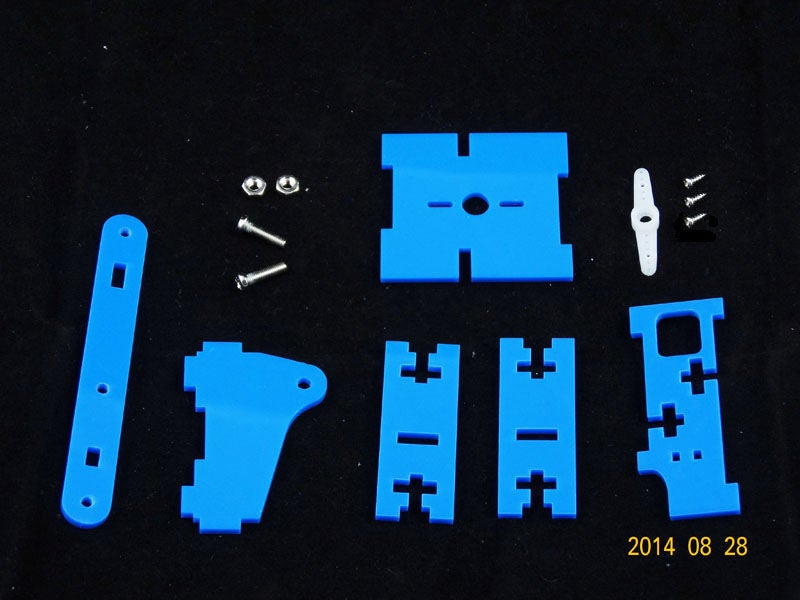
步骤1 :
部分部件有特定备品,例如:螺丝。
(1)压克力一套(其中直径一公分圆圈只需1颗)
(2)螺丝(直径为公制3mm)
(1)20mm x 4
(2)12mm x 6
(3)10毫米x 1
(4)8毫米x 16
(5)6毫米x 8
(6)铜柱x 7
(7)螺帽x 14
(3)伺服马达x 4
(4)Arduino主板x 1
(5)摇杆扩展板x 1
(6)橡胶垫x 4
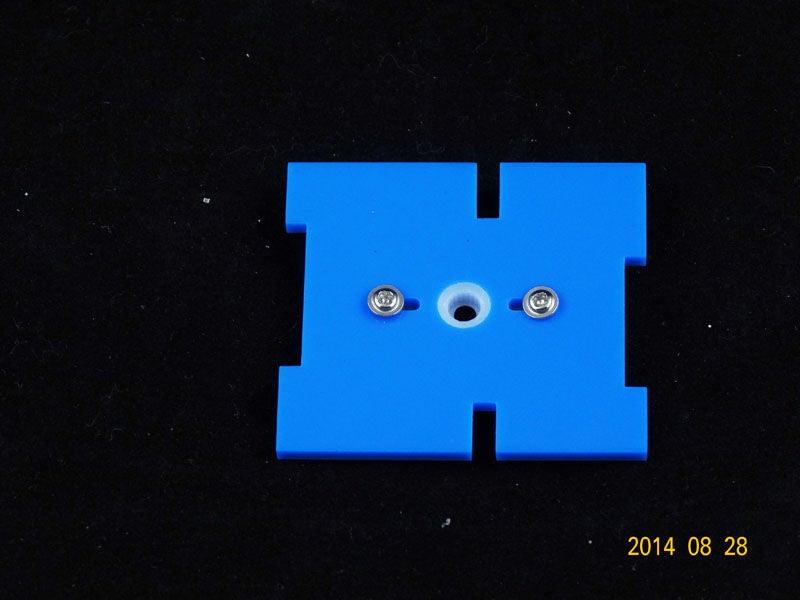
步骤2:底座
所需螺丝:
(1)20mm x 4
(2)铜柱x 4
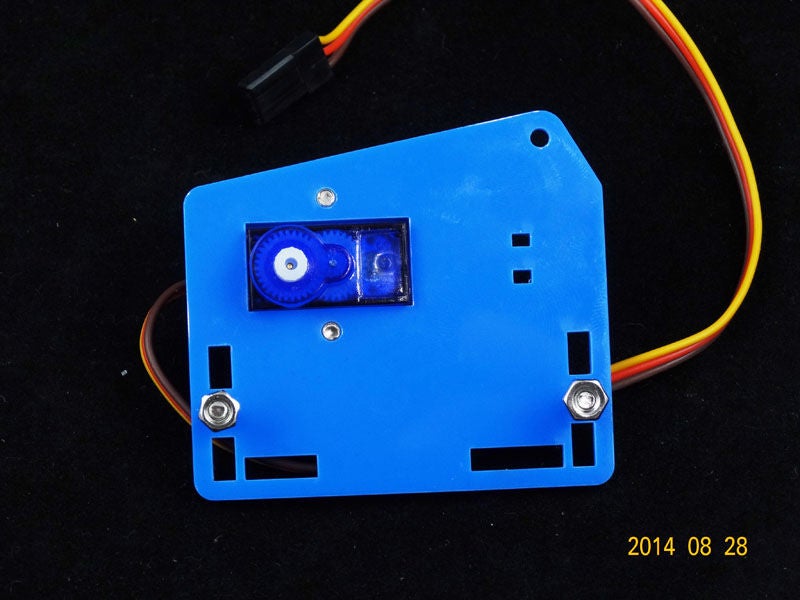
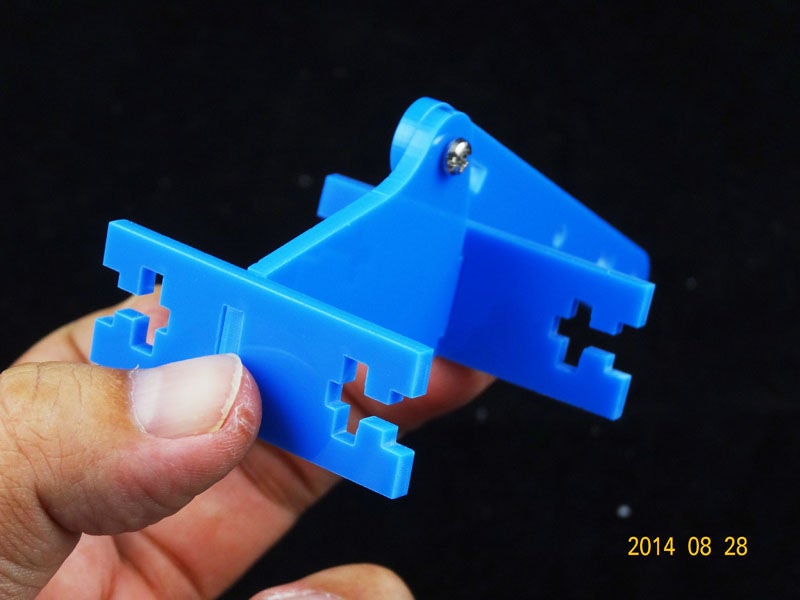
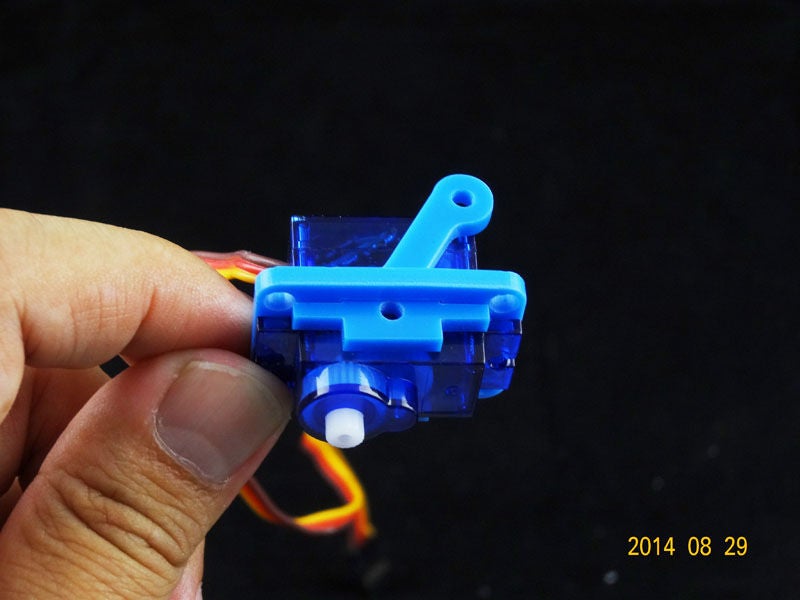
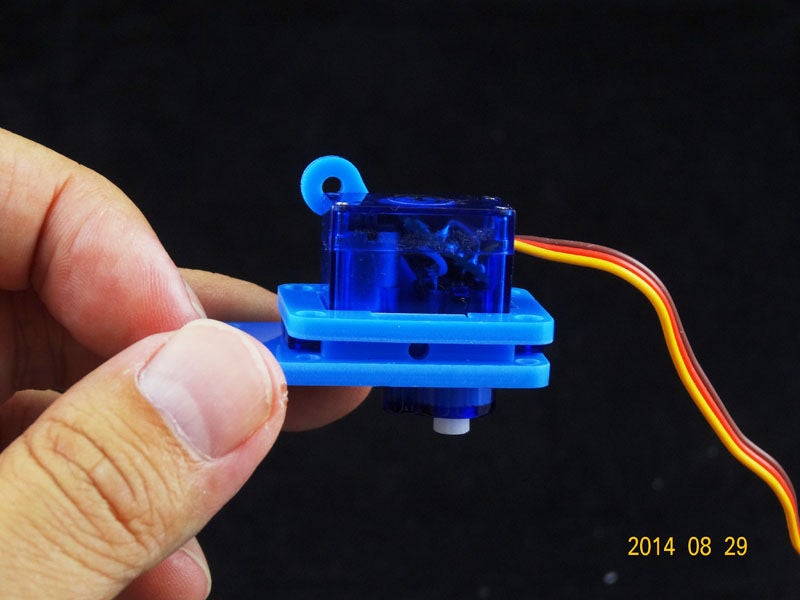
步骤3:第一颗马达
注意:如下一,第一颗钻石要选4颗中白色轴心最长的。装每一颗宝石时,角度都有讲究,记得要遵循说明组装喔(有讲究的意思是马达自由角度仅1〜179度,只能转半圈,故要确保范围内的旋转自由度)。
所需螺丝:结果(1)8毫米x 2
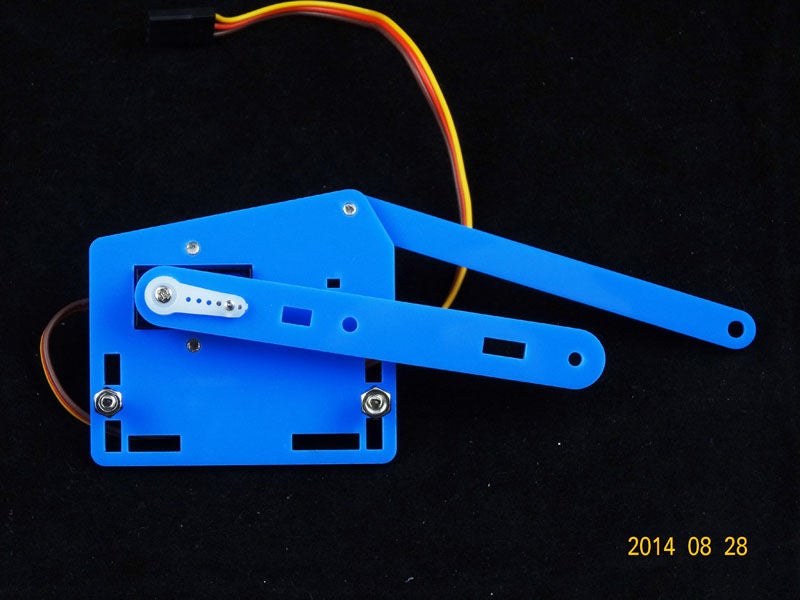
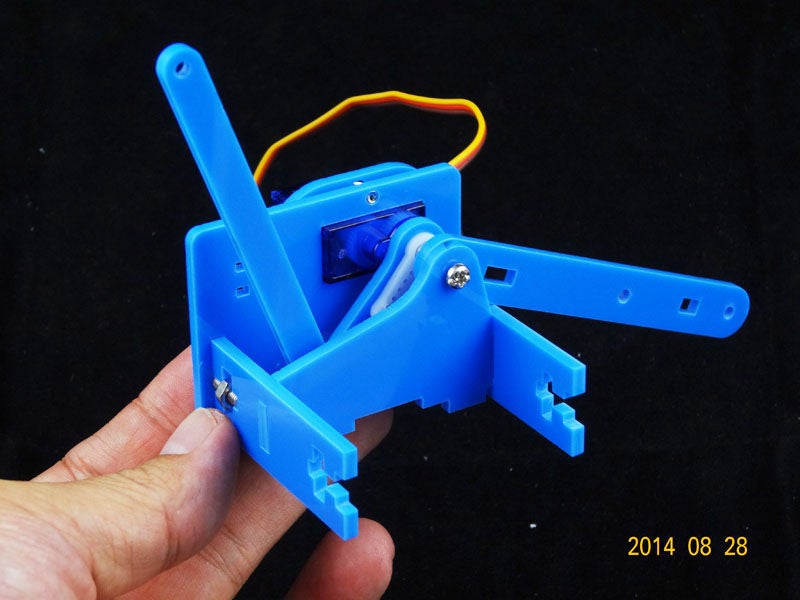
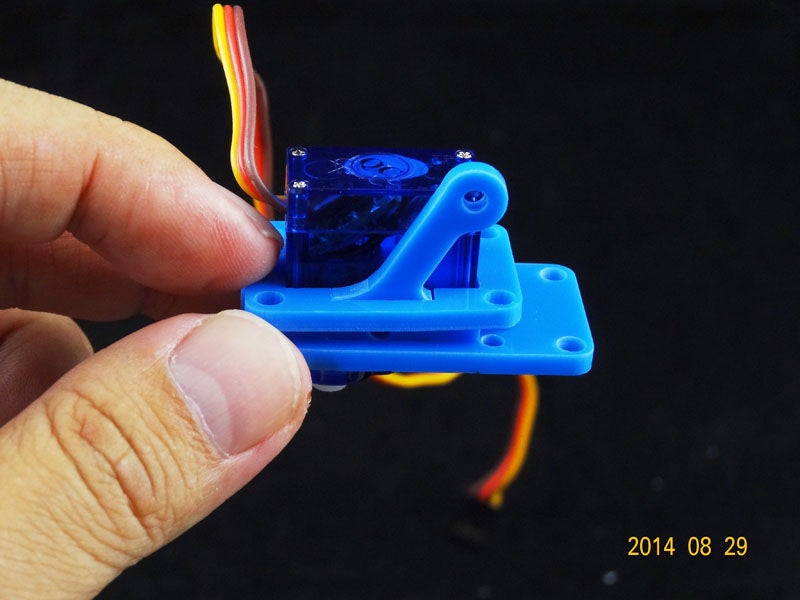
步骤4:左臂




此步骤重点是马达角度调整,请先为马达套上小白套,“顺时钟”旋至不能旋为止,再装成倒数第4张图,然后再“逆时钟”转成倒数第3张图。
(其长杆号码为3,小圆圈不需放上,若孔洞太松,则建议使用螺丝螺丝锁通再配合螺帽)
所需螺丝:
(1)12mm x 2
(2)8mm x 2
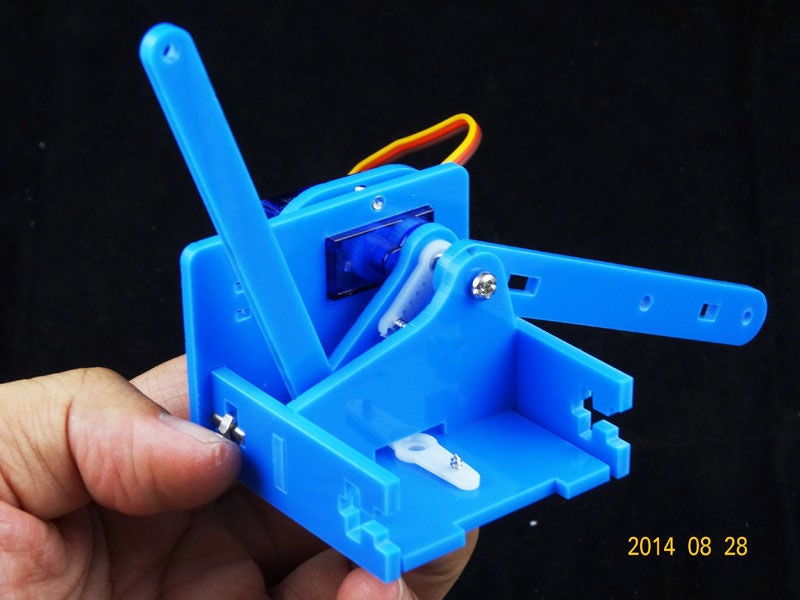
步骤5:右臂


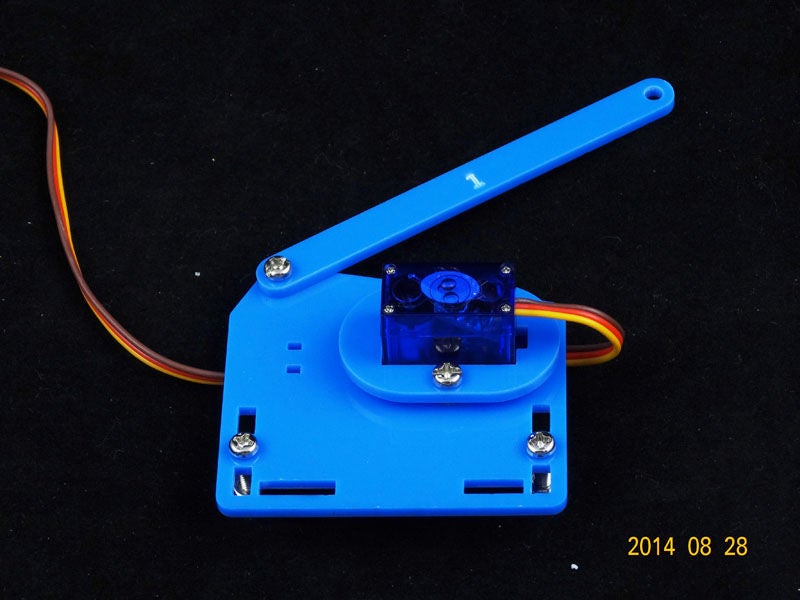
此步骤重点也是马达角度调整,请先为马达套上小白套,“顺时钟”旋至不能旋为止,再装成如最后一张图的3点钟角度,之后就可自由转动
(其中长杆号码为1)
所需螺丝:
(1)12mm x 2
(2)8mm x 2
(3)6mm x 1
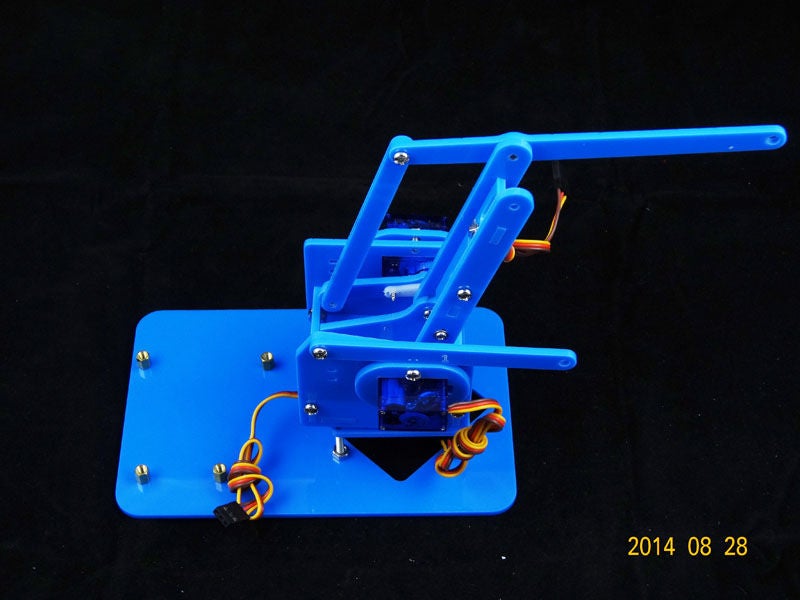
步骤6:左臂+底盘


倒数第2张图合体后,再慢慢锁紧螺丝,最后才上底盘。
所需螺丝:
(1)12mm x 2
(2)6mm x 1
步骤7:右臂+底盘

稍微套上再锁紧螺丝,手要巧。
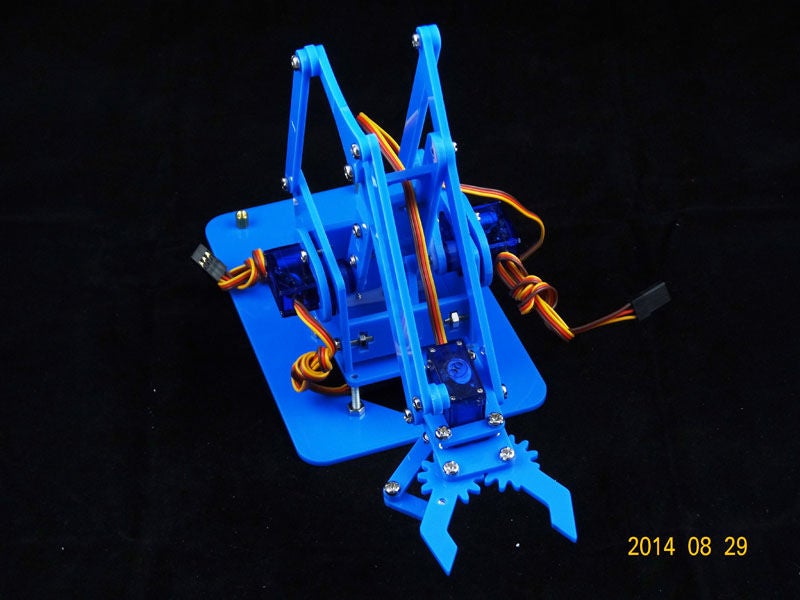
步骤8:中间支架


螺帽微微套上后再套支架,卡入后再锁紧螺丝。
所需螺丝:
(1)12mm x 2
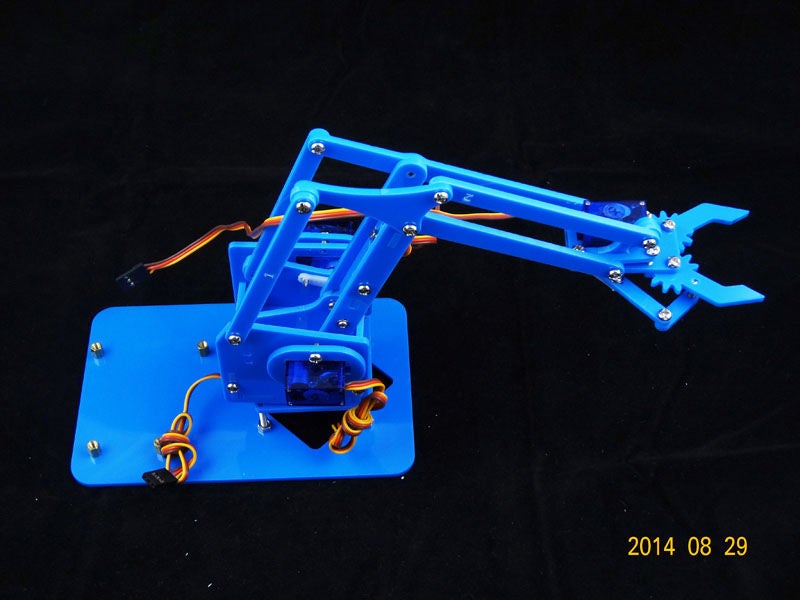
步骤9:与机箱合体

套上后“顺时钟”转至极至,再合体成3点钟方向,之后可以任意旋转。(记得要锁上马达中间螺丝喔。)
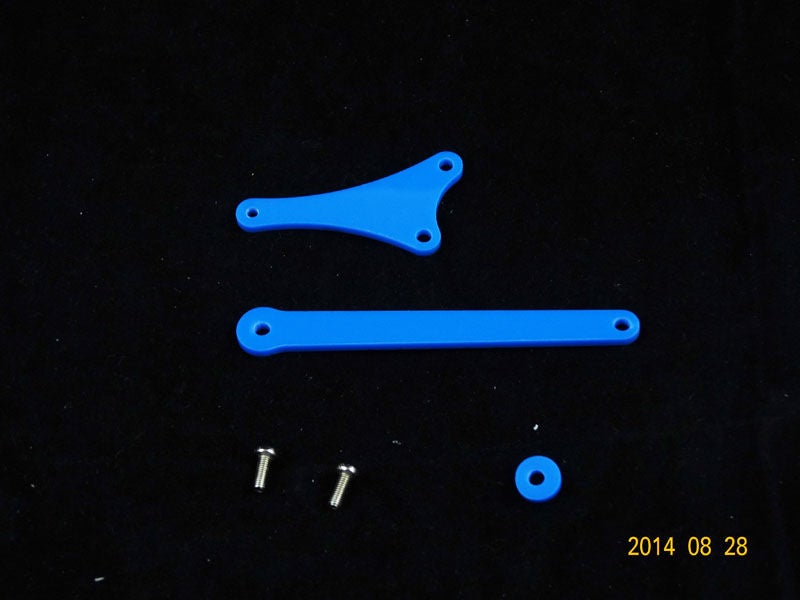
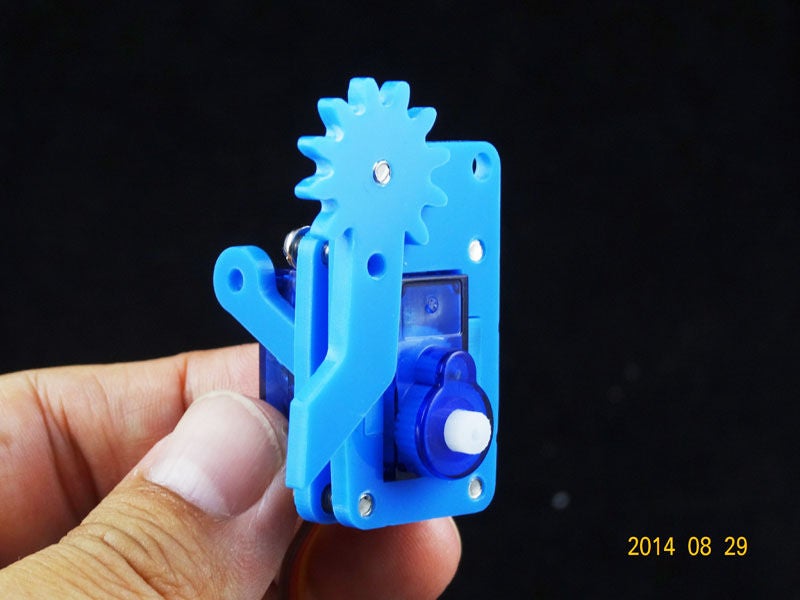
步骤10:支杆一

所需螺丝:
(1)6毫米x 2
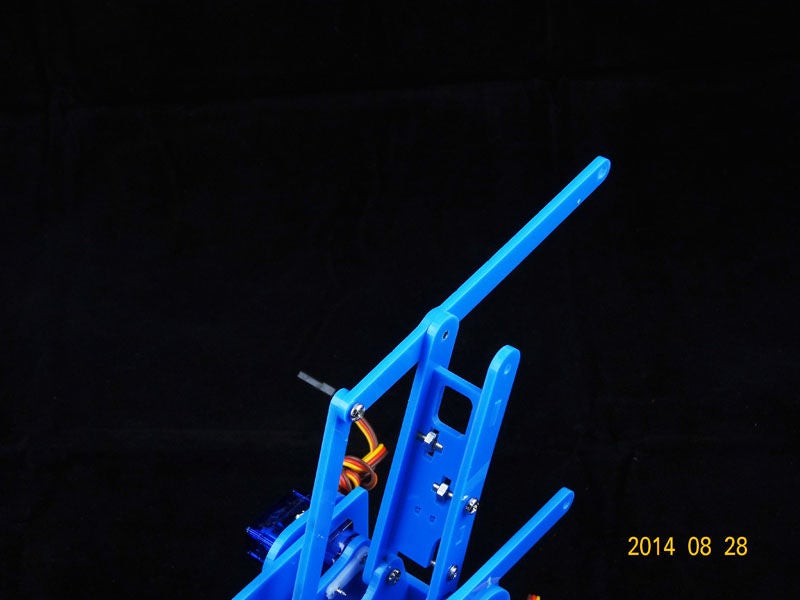
步骤11:支杆二


长杆号码为2(其中小圆圈不需放上也,若孔洞太松,则建议用螺丝刀锁通再配合螺帽)
所需螺丝:
(1)8毫米x 1
(2)6毫米x 1
步骤12:最后一颗马达




所需螺丝:
(1)8mm x 4
步骤13:夹具一

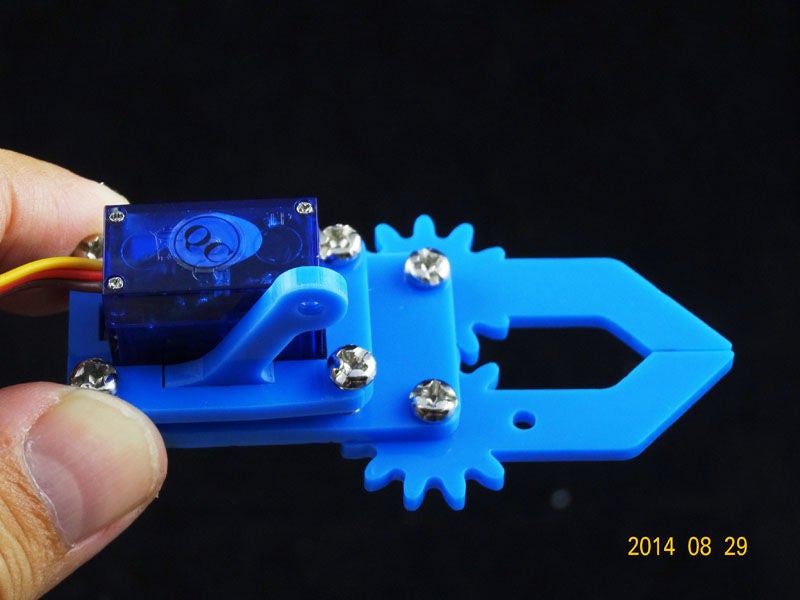

所需螺丝刀:
(1)8mm x 1
(2) 6mm x 3
步骤14:夹具二

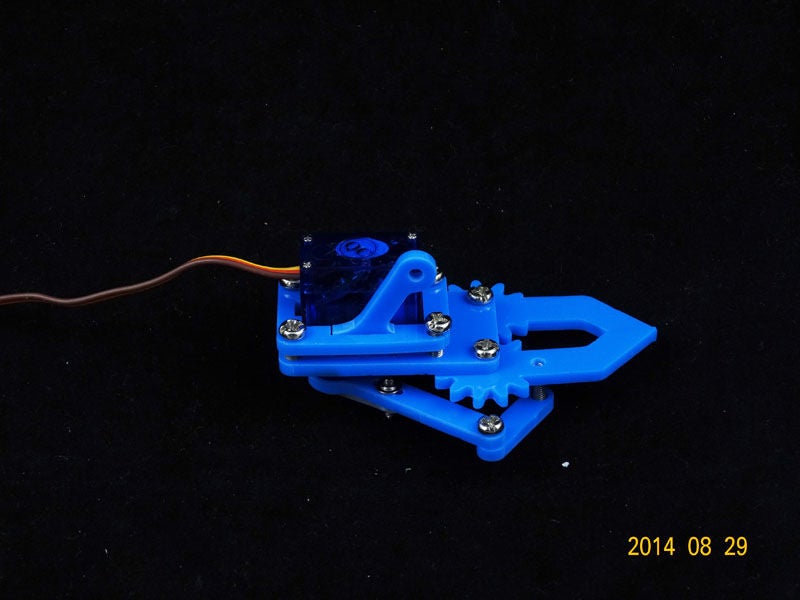
此步骤重点是马达先“顺时钟
第15步:上夹具


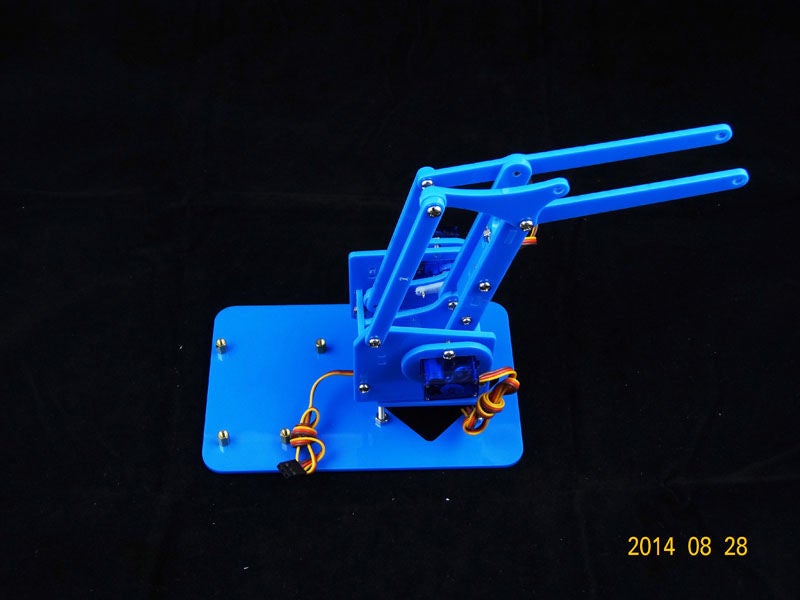
步骤16:最后来上控制板

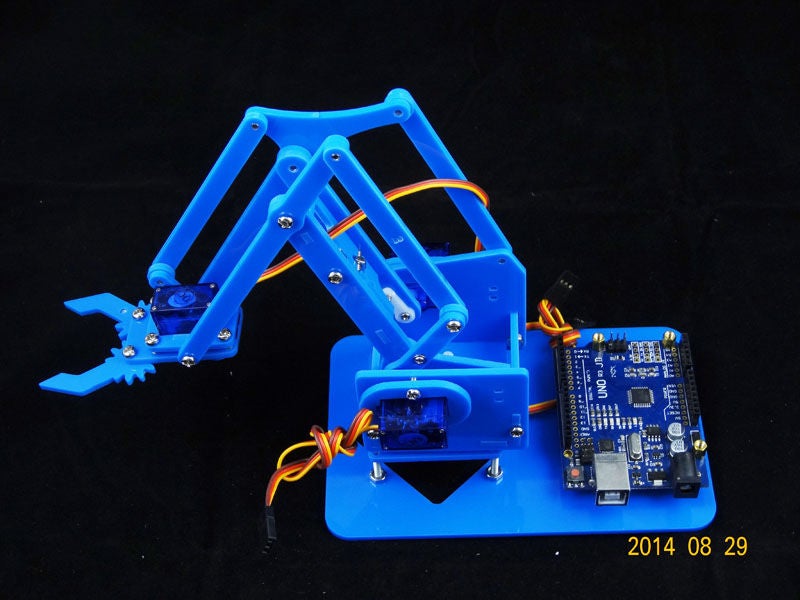
注意顺序并注意排线颜色,其中这样的meArm.Joystick主体就大功告成啦。
步骤17:蓝牙升级套件
有买蓝牙升级套件的请参考此步骤:
使用蓝牙前要先跟手机配对,之后再打开meArm_bt APP,点击红色蓝牙图示来跟蓝牙连线,若有成功连线,则蓝牙板上红灯就长亮而不闪烁,而且APP的蓝牙图示也会变成蓝色,这时就可用手机操控手臂了,结束时记得再按一次APP上的蓝牙图示离线喔。之后每次开APP要操控手臂时就只要连线即可,不用再配对了。
注:
1。蓝牙板为HC﹣06,baurate已调成38400
2。脚位使用:RX / DX = 12/13(在Arduino中就算上传程序也不用拔掉蓝牙卡)
4 。安装蓝牙APP,请下载本步骤附件的meArm_Joystick.apk
5。若您的手臂为旧版的,请升级UNO主板的主程序喔meArm_bt.ino
6。蓝牙APP也可按此由Google Play下载。
步骤18:故障排除
(1 )问:为什么摇杆上的黄灯一直闪一直闪
(答)正常情况下,主板LED灯会长亮,但因为Arduino电路板电流负荷过大,导致主板一直重开机。原因可能是因螺丝锁太紧马达转不动或马达
解决方式:
(A)放松螺丝,宁愿整组看起来散散
(B)拔掉全部马达线,再一条一条插上测试
(C)如果夹具超过范围卡住回不去,则轻
(2)问:为什么手臂整个会吱吱叫??
(答)理由同上,因为主板重复
(3)问:为什么一开机,手臂会卷成奇怪的角度,或整团缩在一起?
(答)手臂出厂时,每颗马达都会有预设角度,如果组装时没按照标准步骤调整马达角度,则开机时整台手臂就会变得很畸型
解决方式:
( A)整台手臂砍掉重练,或
(B)在软体中更改马达初始角度
(4)旋臂与底座马达不易咬合,点击(答)底座马达不易吃整只旋臂,原因通常是咬合不易,建议先将旋臂最底部正方型压克力片先独立出来与马达试咬合,待有手感时再重新组装试整只旋臂。
( 5)马达螺丝似乎有短少
(答)为更方便组装马达,我们已将马达螺丝统一替换小型螺丝,若仅有短少,请随时联系我们。
-
机械臂
+关注
关注
12文章
515浏览量
24619
发布评论请先 登录
相关推荐
RK3568国产实验箱+人工智能机械臂:跳舞、叠罗汉、夹方块、积木搬运案例全解!

“双保险”锁紧机制:YM28系列连接器为机械臂提供高牢靠的大电流连接

机械臂的高效运作,连接器起关键作用
工业产线机械臂数字孪生 流程工业应用

【原创】 drawbot 平面机械臂scara写字画画机器人DIY教程贴
OrangePi AIpro应用:机械臂应用开发指南

工业机器人和机械臂的设计、功能和应用有哪些区别?
奥比中光推出2.0版大模型机械臂
大象机器人开源协作机械臂机械臂接入GPT4o大模型!

国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
基于六维力传感器的机械臂自动装配应用

自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)

机械臂技术的前沿探索:年度案例回顾!






 工商网监
工商网监
评论